渦流發生器對翼板結合部流噪聲的控制機理研究
2023-09-07 09:39:40李定遠方斌李一鳴劉文璽
兵工學報 2023年8期
李定遠, 方斌, 李一鳴, 劉文璽
(1.92213部隊,廣東 湛江 524000; 2.海軍工程大學 艦船與海洋學院, 湖北 武漢 430033)
0 引言
渦流發生器最初用于進行流動分離的控制,國內外已有很多利用渦流發生器進行流動分離控制的研究。Godard等[1]研究了利用渦流發生器進行流動分離控制時,渦流發生器的最優參數選擇,為后續渦流發生器的設計提供了借鑒。Natálie等[2]通過風洞試驗與數值計算相結合的方法,研究了渦流發生器參數對NACA63A41翼型流動分離控制的影響。Fouatih等[3]以NACA4415為研究對象,通過風洞試驗驗證了三角形渦流發生器對于控制邊界層分離是有效的。Kundu等[4]以S1210翼型為研究對象,其研究表明在機翼后緣附近增加反向旋轉的渦發生器,機翼的升力系數、失速角均有所增加。Heyes等[5]以運輸機翼為研究對象,在風洞中進行試驗研究,其結果表明安裝渦流發生器產生的與翼尖相反的渦會減少機翼升力損失。王建等[6]針對飛機平尾性能的改善,在平尾下表面加裝了渦流發生器。其仿真結果表明安裝渦流發生器后平尾下表面流態得到改變,流動分離得到了延緩。田曉慶等[7]采樣仿真計算的方法研究了渦流發生器尺寸、安裝角度對尾渦特性的影響,并給出了相關參數對尾渦的影響規律。江瑞芳等[8]用仿真計算與試驗測試相結合的方法對采樣渦流發生器進行風力機氣動性能改善的研究,其結果表明在安裝渦流發生器后,翼型表面的分離點得到了延后,風力機的輸出功率得到了提高。孫浩偉等[9]針對水輪機機翼表面的流動分離問題研,采用渦流發生器進行流動控制。通過計算流體力學(CFD)計算表明,安裝渦流發生器后翼型的最大升力系數得到了提高。 周星等[10]以大展弦比的機翼為研究對象,通過仿真與試驗相結合的方法進行了流動控制的優化,其結果表明主翼面的最大升力系數得到了提高、滾轉力矩發散得到了推遲。渦流發生器進行流動分離控制的基本原理是在流體流過渦流發生器時誘導產生渦,從而將高動能的渦引入低動能區,來延緩流動分離[11]。
基于渦流發生器誘導高動量渦的特性,國內開展了基于渦流發生器的船舶與水下航行器的減震降噪的研究。黃紅波等[12]、舒禮偉等[13]先后對水面船舶減振降噪中應用的渦流發生器進行了優化研究,其結果均表明渦流發生器能降低螺旋槳空泡誘導的脈動壓力,使船體的振動得到了一定控制。劉永偉等[14]研究了在翼型上加裝渦流發生器后翼型的流激噪聲控制情況,其結果表明加裝渦流發生器后,翼型的流激噪聲得到了一定的控制,這為渦流發生器在潛艇降噪上的應用提供了一個良好的前提。Liu等[15]、姜虹旭[16]研究了渦流發生器的外形、夾角、安裝位置對SUBOFF模型噪聲控制的影響,并在水洞中進行試驗測試,驗證了其設計的渦流發生器降噪效果。馬英華等[17]、裴杰[18]以船艏的聲吶導流罩模型為研究對象,研究了采用渦流發生器對其進行噪聲控制,其仿真結果表明安裝渦流發生器后,不僅對噪聲進行了抑制,而且還使得模型的阻力得到一定程度的減小。
在潛艇速度日益提高、噪聲控制要求日趨嚴格的情況下,因為流噪聲隨著航速呈指數增加特別是在航速達10 kn以上時,流噪聲與航速的9~11次方呈正比[19],所以流噪聲的控制也逐漸得到了廣大研究人員的關注。姜宜辰等[20]從水下航行體的外形出發進行了流噪聲控制的研究,經過計算得出頭部形狀中等飽滿,艉部外凸,平行中體長度小的艇體阻力以及流噪聲小。Liu等[15]通過仿真與試驗的相結合的方法,對采用渦流發生器進行潛艇降噪進行了初步研究,其結果表明采用渦流發生器進行潛艇噪聲控制是可行的。在此基礎上,以潛艇三大噪聲產生位置的指揮臺圍殼[21]為研究對象,開展渦流發生器的高度、間距最優參數設計及其對馬蹄渦削弱機理的研究。由于在水洞中進行噪聲測試主要有以下兩個問題不難很好地解決:第1個是水中進行消聲較為困難,第2個是水中進行噪聲測試很難將流噪聲分離出來。所以本文研究所采用的仿真計算以空氣為介質,而試驗測試則在消聲風洞中進行。
1 流噪聲仿真計算
本文采用下述方法進行計算,總共分為兩步:
1)進行流體計算,為了能夠讓非定常流體計算具有更好的收斂性,對研究對象采用Star CCM+軟件并選用湍流模型先進行定常計算,然后再進行非定常計算。在達到一定的計算時間后,按輸出一段時間內的流體計算結果,主要包括計算得到的速度與密度。
2)將步驟1中得到的速度與密度導入Actran軟件中,將流體結果進行插值計算,完成將結果解在聲場網格上的映射,采用有限元的方法進行聲場的計算,在外設置圓柱形無限元邊界。計算流程如圖1所示。

圖1 計算流程圖
1.1 仿真計算模型
1.1.1 流體計算模型
采用SUBOFF潛艇模型,模型縮尺比為1∶48。流體計算域為圓柱型,如圖2所示。圖2中計算域長度為4L,其中L為艇長(2.178 m),計算域直徑為5D,其中D為艇體最大直徑(0.254 m)。計算域入口設置為速度進口,且速度進口距離艇首一倍艇長,出口選取壓力出口,并設定相對壓力為0 Pa,且壓力出口距離艇尾兩倍的艇長。計算域的圓柱面設置為對稱面,艇體表面設置為無滑移壁面。在進行定常計算時采用k-ε(k為湍動能,ε為湍流耗散率)湍流模型進行流體計算,并將其結果作為非定常計算的初始條件,在進行非定常計算時采用大渦模擬(LES)結合動態亞格子模型進行計算,對流項采用中心差分格式,時間步長設定為1×10-4s,速度入口的速度設置為60 m/s。

圖2 計算域
在進行流場網格劃分時,由于渦流發生器的尺寸很小,進行了網格分塊加密,加密區網格如圖3所示。

圖3 渦流發生器局部網格加密圖
1.1.2 聲學計算模型
取圍殼附近馬蹄渦部位流體區作為噪聲源,進行流噪聲的聲場計算。聲場計算的模型如圖4所示。
圖4中圍殼區域的多邊形柱體為計算選取的聲源區,設定為Lighthill volume邊界條件,聲傳播區的外包面設置為無限元邊界,用于遠場聲壓的計算。在此模型的基礎上進行聲場格劃分,網格的截面圖如圖5所示。

圖5 聲傳播區網格劃分
1.1.3 渦流發生器設計
基于三角形形狀渦流發生器在夾角為30°時具有良好誘導渦效果的規律[16],設計了高度、間距兩個參數不同的7種渦流發生器。渦流發生器的高度、間距如圖6所示。
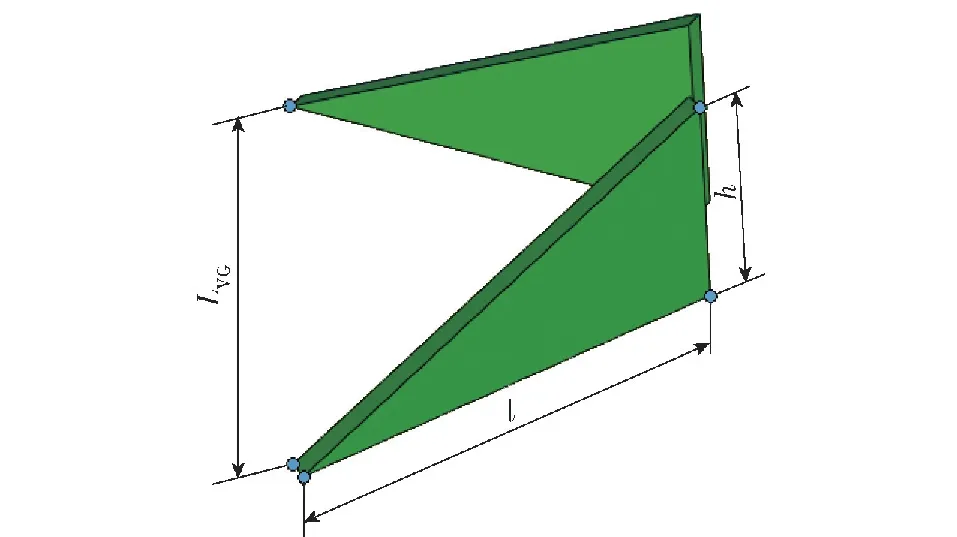
圖6 渦流發生器參數示意圖
圖6中h為渦流發生器的高,LVG為渦流發生器的間距,l為渦流發生器的長。按照固定一個參數、變化另一個參數的原則分為兩個大的方案組:方案組1,LVG不變、h變化;方案組2,h不變、LVG變化。兩方案組具體參數分別如表1、表2所示。方案組2中選用的渦流發生器高度是方案組1中最優的高度,方案組LVG-0.25H與方案組h-0.075H為相同的渦流發生器,因此共設計了7種渦流發生器,但兩個方案組各組均有4個方案。

表1 方案組1的渦流發生器參數

表2 方案組2的渦流發生器參數
1.2 仿真計算結果
1.2.1 方案組1流場結果分析
1.2.1.1 速度場云圖分析
圖7所示為潛艇對稱面的速度場云圖,將各方案的速度場云圖進行對比。經過對比發現,隨著渦流發生器高度的增加,渦流發生器尾部速度場的速度值也在增大。

圖7 速度場云圖
1.2.1.2 壓力場云圖分析
經對比各方案的壓力場云圖(見圖8)發現,隨著渦流發生器的高度增加,渦流發生器尾部壓力場云圖的壓力逐漸降低,這符合能量守恒的規律。
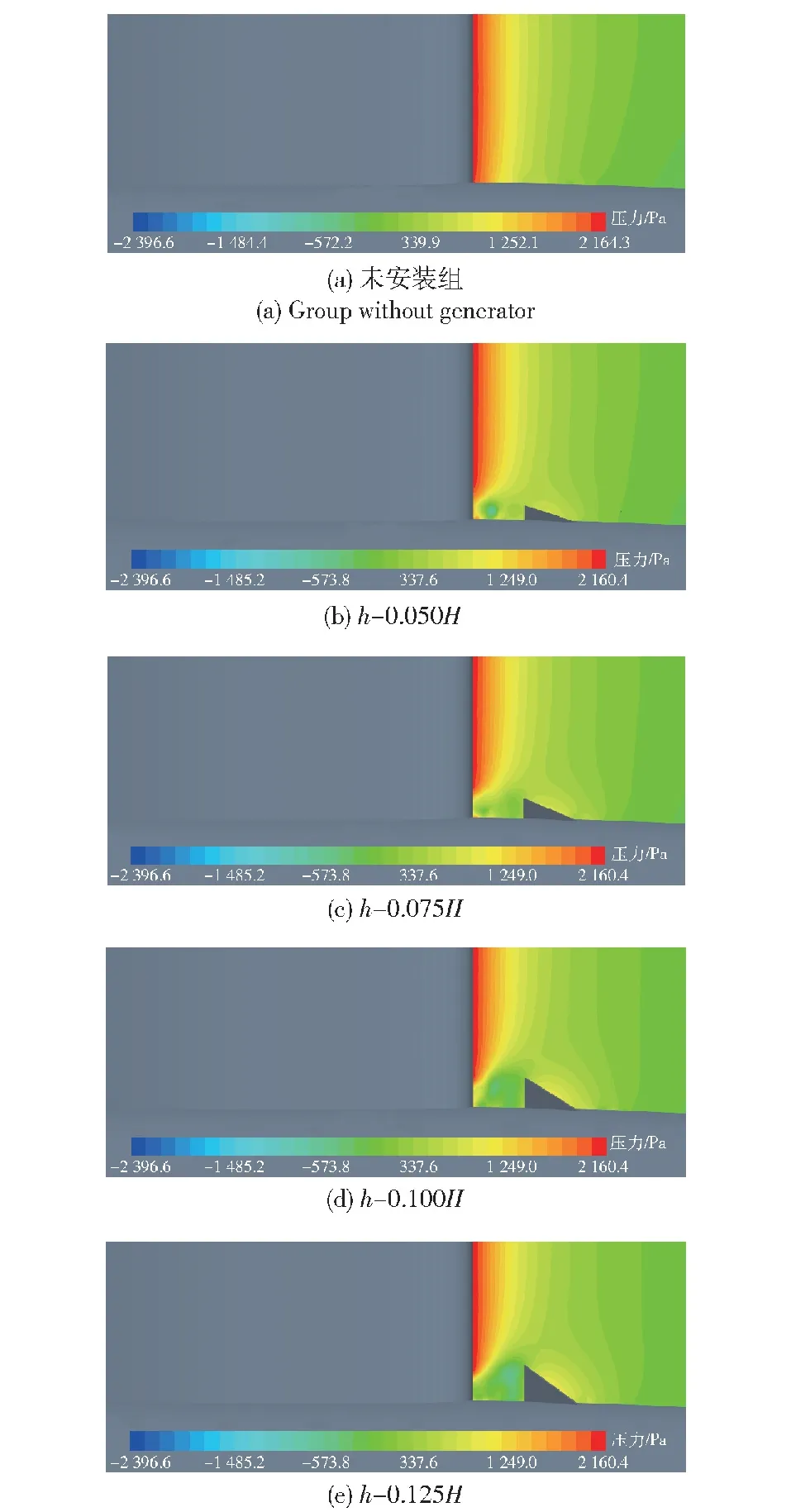
圖8 壓力場云圖
綜合速度場、壓力場云圖分析可以發現,渦流發生器的高度會影響其誘導渦的能量,渦流發生器的高度越高,其誘導產生的渦動能就越大。
1.2.2 方案組1聲場結果分析
在進行聲學計算時,設置了8個測點進行聲壓的計算,分前后兩排,以潛艇中心為坐標原點,由艇艏指向艇艉為x軸正方向,潛艇左邊為y軸正方向,在此坐標系下測點坐標如表3所示。

表3 聲場測點坐標
由于該處流噪聲為寬帶譜,此處直接給出經過處理后總聲級隨測點位置變化的曲線以進行對比,如圖9所示。

圖9 方案組1各測點總聲級隨測點x軸仿真結果
1.2.3 方案組2流場結果分析
1.2.3.1 速度場云圖分析
圖10所示是圍殼俯視圖的速度場云圖,通過圖10中各方案的對比分析表明,不同間距對圍殼兩側速度場的影響是不同的,主要體現在加裝渦流發生器后產生的速度降低區域離圍殼的橫向距離以及速度降低的大小是不同的。由圖10可以看到,LVG-0.250H、LVG-0.225H的速度場云圖在圍殼的平行中體之后,圍殼兩側產生了兩個很長的綠色帶狀低速區,這里的速度較未安裝組降低約10 m/s,且LVG-0.250H的綠色帶狀低速區離開圍殼的橫向距離要大于LVG-0.225H的,而LVG-0.250H中渦流發生器的間距也是大于LVG-0.225H的。由于LVG-0.275H與LVG-0.300H并沒有產生很明顯的綠色帶狀低速區,這里分析其可能是由于渦流發生器誘導的渦位置在原始馬蹄渦的位置外側,不能有效地對馬蹄渦進行削弱,所以沒有出現類的綠色帶狀低速區。

圖10 速度場云圖
通過對LVG-0.250H、LVG-0.225H和未安裝組的對比分析,渦流發生器的間距會影響其誘導產生的渦的橫向位置,渦流發生器間距越大,其誘導產生的渦離開圍殼的橫向距離也越大。
1.2.3.2 壓力場云圖分析
由圖11可知,方案組2中的各個方案對圍殼前緣的逆壓梯度均有所降低,將部分壓力勢能轉化為反向渦旋的動能,同時可以看到原來負壓區的最小負壓均有了一定的提高。這與1.2.1節中分析的能量守恒是一致的。不同方案之間的差別在于渦流發生器迎流面上的壓力勢能是不同的。渦流發生器間距較小時,迎流面上的壓力勢能較大,根據能量守恒原理,轉化為動能的勢能減少;渦流發生器間距較大時,迎流面上的壓力勢能較小,轉化為動能的勢能較多。

圖11 壓力場云圖
綜合上述對流體計算結果在速度場云圖、壓力場云圖的分析,渦流發生器的間距對馬蹄渦控制的影響主要體現在兩個方面:第1個方面就是渦流發生器的間距會影響誘導的反向渦的產生位置,從而影響對馬蹄渦的削弱;第2個方面是渦流發生器的間距會影響勢能向動能的轉化,渦流發生器間距越小,會增加迎流面上的壓力勢能,從而減少勢能向動能的轉化,渦流發生器間距越大,會減少迎流面上的壓力勢能,從而增加勢能向動能的轉化。
1.2.4 方案組2聲場結果分析
此處依然通過對總聲級沿測點的變化來判斷降噪的效果,圖12所示為方案組2的各方案總聲級沿測點的變化曲線。由圖12可知:在第1排測點的總聲級中,LVG-0.250H的總聲級在所有方案中處于最下方,且LVG-0.250H所對應的曲線也小于未安裝組對應的曲線,由此可見其控制流噪聲效果是方案組2的各方案中最佳的;在第2排測點的總聲級對比中LVG-0.250H依然是所有方案中總聲級最小的且也小于未安裝組;綜合上面兩排測點總聲級隨測點位置的變化曲線的對比,在方案組2的各方案中LVG-0.250H采用的渦流發生器具有最佳的控制效果,所以認為該方案渦流發生器的間距是各方案中的最佳間距。

圖12 方案組2各測點總聲級隨測點x軸坐標仿真結果
2 噪聲測試試驗研究
針對設計的7種渦流發生器,開展消聲風洞中流噪聲測試試驗。
2.1 噪聲測試試驗設計
驗測試的模型以Q235鋼為材料,尺寸與仿真計算模型一致。模型外表面鋼板厚約1.5 mm,內設16根5 mm厚的環形肋骨,盡可能使模型在試驗中壁面接近剛性壁面。圖13所示為在消音室內安裝好的SUBOFF模型。

圖13 模型安裝圖
試驗測點的布置圖如圖14所示,與仿真計算中測點位置一致。

圖14 測點布置圖
圖15(a)是消音室內布置好的8個聲壓測點,為減小來流對聲壓傳感器的影響,在其端部安裝鼻錐(見圖15(b)的聲壓傳感器前端)。

圖15 聲壓測點現場布置圖
為測試不同方案對流噪聲的控制效果,此處采用雙面膠粘連的方式進行固定,渦流發生器連接的底板是與模型表面相同的曲面,在安裝時吻合較好,粘合后較為牢固,且渦流發生器與底板均采用Q235鋼制作。圖16所示為實際固定時的圖片。

圖16 完成安裝的渦流發生器
2.2 噪聲測試試驗結果分析
此處依然給出試驗測試中總聲級沿測點的變化曲線來進行對比分析。圖17給出了方案組1的各方案與未安裝組的曲線對比。
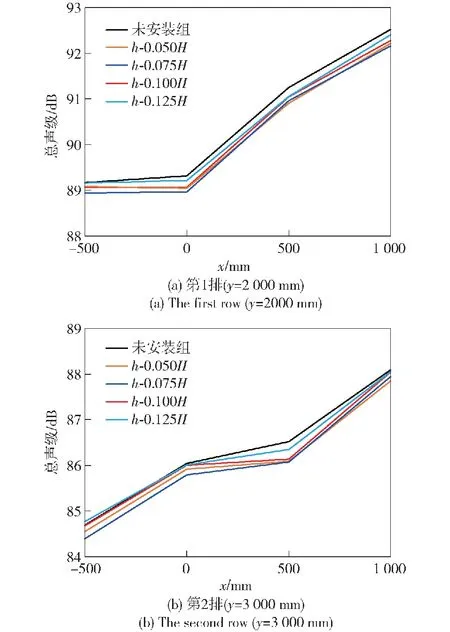
圖17 方案組1各測點總聲級隨測點x軸坐標試驗結果曲線
從圖17可以看出,各方案的曲線均低于未安裝組,且h-0.075H的曲線位于各方案與未安裝組的最下方。
圖18給出了方案組2的各方案與未安裝組的曲線對比。由圖18可知,各方案的曲線均低于未安裝組,而LVG-0.225H與LVG-0.250H的曲線大致接近,且低于其他兩個方案。

圖18 方案組2各測點總聲級隨測點x軸坐標試驗結果
3 仿真計算結果與試驗結果對比
將圖9方案組1的仿真計算結果與圖17渦流發生器高度研究的聲學測試結果,圖12方案組2的仿真計算結果與圖18渦流發生器間距研究的聲學測試結果進行對比。
下面對仿真計算與試驗測試結果進行對比分析:
1)仿真計算的方案組1中具有最佳控制效果的是h-0.075H,在試驗測試的方案組1中也是h-0.075H具有最佳的噪聲控制效果。這說明在渦流發生器間距一定的情況下,仿真與試驗結果均表明渦流發生器的高度為圍殼高度的7.5%時對流噪聲的控制效果最佳。在計算方案組2中具有最佳控制效果的是h-0.075H,在試驗方案組2中具有最佳控制效果的依然是h-0.075H。這說明在渦流發生器高度取為圍殼高度7.5%的情況下,渦流發生器的間距取為圍殼高度的25%時具有最佳的控制效果。從定性的角度來看,試驗結果與仿真計算結果是一致的。
2)從圖9、圖12的仿真結果中均能發現總聲級隨著測點1~測點4的位置的變化呈現衰減趨勢,而相應圖17、圖18的聲學測試組中試驗結果的總聲級沿測點1~測點4位置變化呈現上升趨勢,仿真計算結果趨勢與試驗結果趨勢并不一致。從研究的目的出發,研究通過渦流發生器對圍殼馬蹄渦的控制來進行流噪聲的控制,所以在仿真計算中僅僅取圍殼部位的流體為聲源區。但是從試驗條件的實際情況出發,實現不了僅僅對圍殼部位流體作為聲源的噪聲測試,所以此處對整艇的流噪聲進行了測試。上述這種處理導致試驗測試中的聲源范圍要大于仿真計算。在仿真計算中靠近艇首的測點離圍殼部位的聲源區要比靠近艇尾的測點近,所以從前往后總聲級呈現下降趨勢。而在試驗測試中,除了圍殼部位的噪聲源外,艇尾的噪聲源也是非常重要的一部分。從曲線可知靠近艇尾的測點總聲級要高于遠離艇尾的測點總聲級。
4 結論
為進行翼板結合流噪聲控制問題研究,采取數值模擬計算與試驗相結合的方法,對不同高度、間距的7種渦流發生器設計方案進行對比,研究了在一定條件下的最佳設計方案并初步分析了渦流發生器高度、間距對噪聲控制效果的影響機理。得到如下主要結論:
1)在翼板結合部前緣安裝渦流發生器能夠實現介質為氣體時流噪聲的控制。對于SUBOFF試驗模型,渦流發生器夾角為30°安裝在距圍殼前緣10%的圍殼長度處時,在渦流發生器間距取為25%的圍殼高度條件下,效果最好的是高度為7.5%圍殼高度的渦流發生器;在渦流發生器高度取為7.5%的圍殼高度條件下,效果最好的是間距為25%圍殼高度的渦流發生器。
2)渦流發生器的高度直接影響其誘導產生的渦的動能,渦流發生器的間距直接影響其誘導渦產生的位置以及誘導渦的能量。其通過將勢能轉化為誘導渦的動能,使其誘導產生的渦能夠與原始的馬蹄渦相互抵消,從而使得馬蹄渦的強度得到削弱,從控制聲源的角度,進行了流噪聲控制,減小其遠場輻射聲壓。