基于橢球理論的衛星入軌位置隨機誤差估計方法
2023-09-11 08:33:12吳煥芹王茂才宋志明陳曉宇
西北工業大學學報 2023年4期
吳煥芹, 王茂才,2, 宋志明,2, 陳曉宇,2
1.中國地質大學(武漢) 計算機學院, 湖北武漢 430074;2.中國地質大學(武漢) 智能地學信息處理湖北省重點實驗室, 湖北武漢 430074
衛星入軌位置精準度受多種因素的影響,不可避免地存在系統誤差和隨機誤差。系統誤差可以在設計或實際操作過程中予以考慮并削減,而隨機誤差是由偶然因素引起的,難以預測和控制。隨機誤差亦會導致衛星入軌空間位置的不確定,并在衛星組網和運行過程中傳播,對工作效能產生影響。工程實際中對于高價值的重要航天器,一般是通過發動機點火等方式對軌道進行校正和調整,但對于小衛星和微納衛星,由于其體積小攜帶有限,進行自身軌道修正的代價較高或遠超其設計發射成本,況且大規模星群也沒法進行廣泛的軌道修正。但不同用途的衛星對位姿精度要求不同,如果能準確快速地估計其位置偏差,可以讓工作者做出正確的決策。
當前已經有很多學者對衛星定位精度及運行誤差進行了相關研究,并取得了一定成果。如針對衛星的定位精度,Knogl等[1]利用LEO衛星通信信道對GEO衛星進行精確定位。Vighnesam等[2]研究了通過位置差確定IRS運行軌道的系統方法。Zhou等[3]針對北斗衛星定軌提出了一種基于反單點定位的近實時無推力建模方法。Li等[4]實現了利用衛星激光測距分析北斗3號衛星的軌道精度。Larki等[5]研究了基于梯度法確定衛星軌道的方法。白顯宗[6]基于歷史軌道數據研究了空間目標軌道預報誤差與碰撞概率問題。賀若飛等[7]提出一種基于蒙特卡羅卡爾曼濾波的目標定位算法,并應用于無人機目標定位中,取得較好效果。閻海峰等[8]針對偽衛星空中基站位置不易精確確定的問題,建立了組合導航系統和非線性數學模型,提出了一種抗差自適應高斯混合Sigma點粒子濾波算法。文獻[9]基于多項式區間參數分析法,針對探測器著陸過程動態特性,提出基于非線性有限元建模的探測器著陸區間分析流程,計算得到探測器著陸動響應上界和下界。文獻[10]對分布式InSAR目標三維定位的空間幾何關系,給出了定位精度指標與系統參數精度指標之間關系的解析表達式。文獻[11]針對三星編隊系統,將衛星位置誤差源分為體現誤差相關性的整體絕對位置誤差和體現誤差非相關性的星間相對位置誤差,從而對存在相關性誤差的衛星編隊系統進行定位精度分析。在運行誤差分析中,文獻[12]對影響遙感衛星覆蓋的不確定性因素進行歸一化量化,對具有不確定性因素影響的指標進行求解,得到具有統計特性的指標結果。文獻[13]提出一種線性回歸近似替代不確定性,將不確定性參數對于效能影響降維為一個線性組合系數進行求解。文獻[14]給出了降維表示方法中功率譜密度函數的解析隨機誤差,并通過數值算例加以證明。文獻[15]提出了一種用神經網絡替代不確定性的分析方法,通過人工神經網絡在擬合回歸分析上的非線性特性,研究分布式衛星系統概念設計中的不確定性參數。文獻[16]引入模擬誤差場對不確定進行描述,從而獲得比較精確的估計數值。
綜上可知,目前針對衛星軌道位置精度或誤差描述主要有解析法、數值法或通過第三方測量獲得;研究對象主要是中、高軌單個高價值衛星或低軌少量衛星系統。相關研究中的解析法是將某時刻衛星位置用軌道根數的解析函數表示,為便于建模學者一般采用簡化模型或對不確定性因素做近似處理。該方法在衛星數量不多的情況下適用性較好,但影響計算精度,也不適用于大規模星群。數值法在抽樣數量足夠多的前提下,可實現對樣本的無偏估計,但在衛星規模較大情況下,又存在計算效率低、耗時長等缺點。通過第三方介入測量,又存在過程復雜、成本高等問題。顯然上述方法不能滿足近幾年大量衛星發射入軌,對位置誤差多、精、快的評估要求。
本文結合解析法和數值法,采用概率論的知識和誤差橢球理論進行研究。首先針對衛星發射入軌位置隨機誤差,依據衛星入軌六根數不確定性矩陣,利用協方差陣傳播率確定地心慣性坐標系下衛星入軌位置在3個坐標軸方向的位置不確定性,構建了描述衛星入軌位置隨機誤差的一種橢球理論,給出衛星入軌在一定空間范圍內的概率計算公式。然后利用STK軟件和蒙特卡羅方法,模擬隨機因素影響下低軌微納衛星入軌位置,驗證誤差理論模型與實際工況的一致性。實驗結果表明本文構建的誤差橢球理論可以很好地用于估計入軌位置隨機誤差,尤其是估計大規模星群位置誤差,本文方法具有高效性,很好地克服了已有方法的局限性。
1 衛星發射入軌位置表達式
衛星發射入軌位置通常用軌道六根數表示。在航天工程中,衛星六根數期望值根據效能要求精準確定,而衛星實際入軌位置的離散程度通常可通過六根數的不確定性矩陣表示。
1.1 入軌位置不確定性矩陣
假設衛星入軌位置六根數用向量X表示,即:
X=[XaXeXiXEXωXf]T
向量X中Xa,Xe,Xi,XE,Xω,Xf分別表示衛星軌道的半長軸、偏心率、軌道傾角、升交點赤經、近地點幅角和衛星入軌位置的真近點角。
在衛星發射過程中考慮隨機因素的影響,其入軌位置為隨機變量。設其軌道參數向量X的數學期望為
(1)
衛星軌道位置六根數向量X的方差用DXX表示,即

(2)
DXX的主對角線上的元素為軌道六根數隨機變量Xa,Xe,Xi,XE,Xω,Xf的方差,非主對角線中的元素是描述2個軌道參數之間相關性的協方差。由于在衛星軌道六根數中,各參數相互獨立,即協方差為零,故向量X的方差陣可進一步寫為

(3)
由于衛星入軌位置受許多相互獨立的隨機因素的影響,且每個因素所產生的影響都很小,由中心極限定理,可假設入軌位置六根數服從正態分布。
1.2 衛星入軌位置隨機誤差表示

圖1 衛星入軌點位置誤差示意圖
(4)
式中,rx,ry,rz為空間位置誤差r在x,y,z軸上的分量。顯然

(5)
所以
(6)

(7)

2 衛星入軌位置誤差模型構建
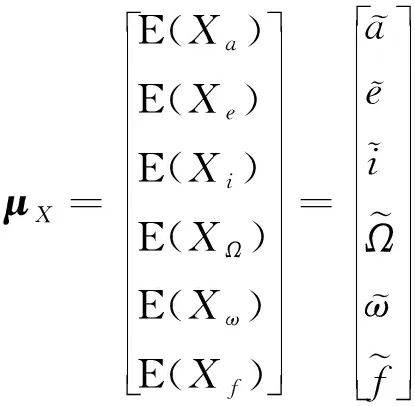
衛星入軌位置誤差σP可以用來評定入軌位置精度,但不能顯示在哪個方向上的位差,在討論衛星或星群的空間碰撞安全、對地覆蓋或其他效能時,需要考慮衛星所處軌道位置在哪個方向上的偏差,為此,需要確定衛星在三維空間內的位置矢量差。衛星入軌位置等概率密度點的集合可形成一閉合曲面,該曲面能把各個方向上的誤差表示出來(見圖2)。但該曲面不是一種典型的曲面,作圖也不方便,但其形狀與橢球很相似,為便于分析,以橢球近似,稱之為等概率密度誤差橢球(見圖3),簡稱誤差橢球。
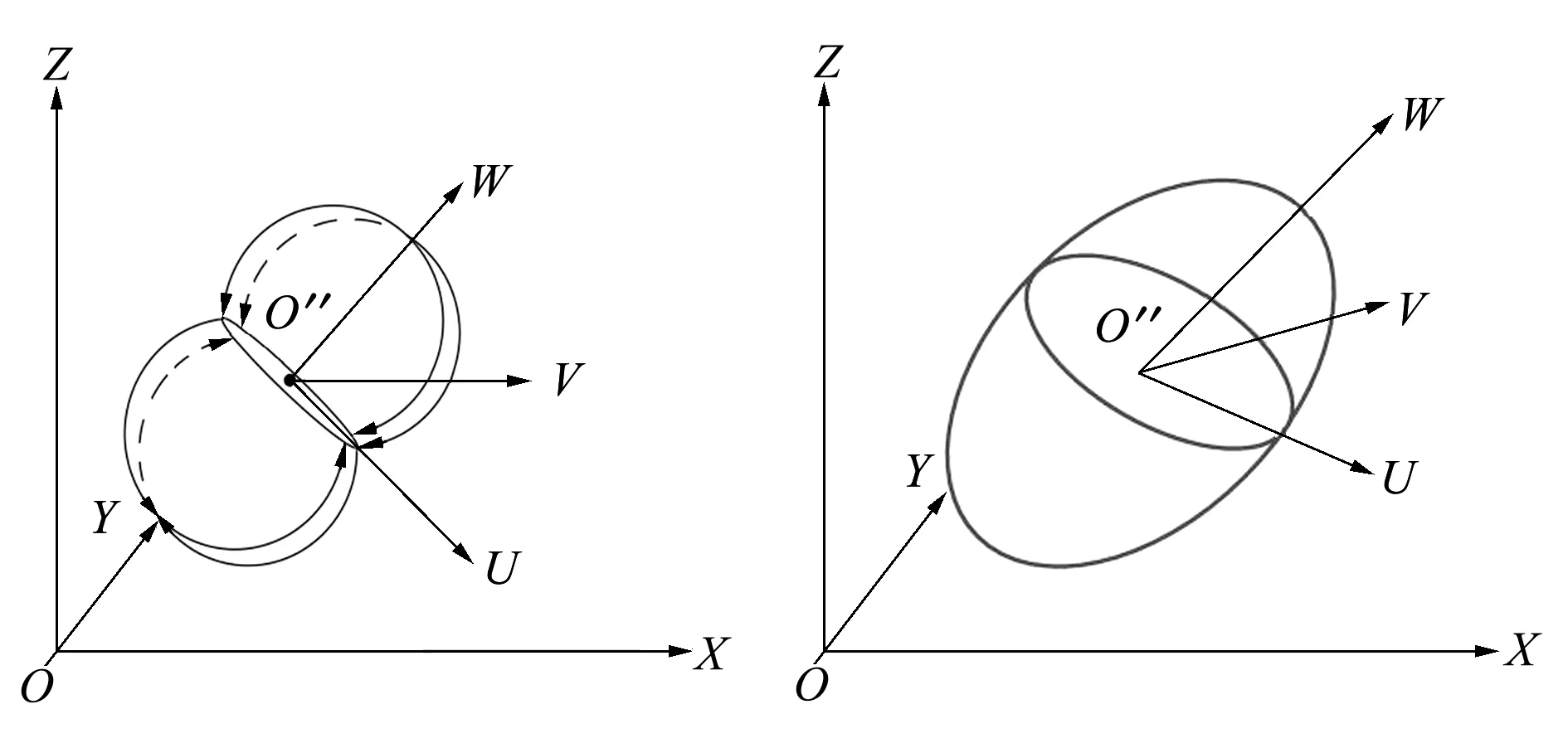
圖2 等概率密度點 圖3 誤差橢球示意圖曲面示意圖
2.1 誤差橢球模型函數
在隨機誤差下,衛星入軌位置在地心慣性坐標系下呈三維正態分布,其聯合分布密度函數為
(8)
式中:Dxx為地心慣性坐標系下衛星入軌位置的不確定性矩陣;|Dxx|為不確定性矩陣的行列式。Dxx的表達式為
(9)

2.2 不確定性矩陣Dxx的確定
已知軌道六根數的協方差陣DXX,根據協方差傳播率[17]可以計算不確定性矩陣Dxx
Dxx=ADXXAT
(10)
式中,矩陣A為一個3×6的矩陣,可用(11)式表示。
(11)

2.3 誤差橢球軸長的確定
根據聯合分布密度函數(8)式,該三維正態分布空間內概率密度相同點的表達式為

(12)
令x-rx=x′,y-ry=y′,z-rz=z′,則(12)式可寫為

(13)
(13)式是地心慣性坐標系下一個相似橢球族表達式,k為放大因子,給定一個k值,就得到一個橢球。為方便分析,進行坐標轉換,求出其在主軸坐標系OUVW(如圖4所示)內的表達式。
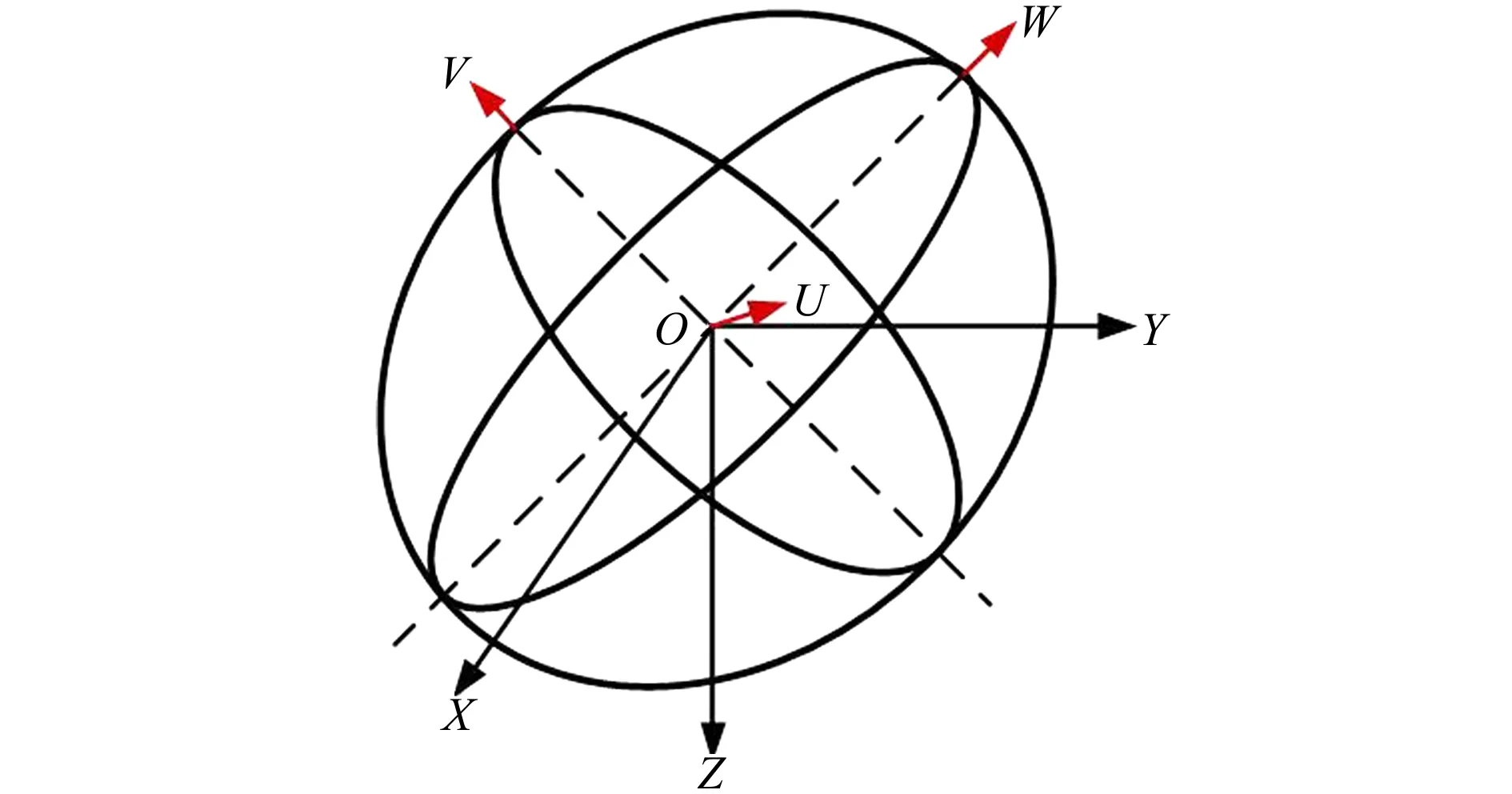
圖4 地心坐標與主軸坐標示意圖
圖4中橢球族的主軸為OU,OV,OW。因為Dxx為實對稱矩陣,則存在正交矩陣M,使得
(14)
對(14)式兩邊同時取逆,得到
(15)
進一步變換形式,得到
(16)
令
(17)
得到
(18)
展開得到
(19)
(19)式為在主軸坐標系下的誤差橢球方程,其半軸長平方分別為k2λ1,k2λ2,k2λ3,這里k為前面定義的放大因子,λ1,λ2,λ3為協方差陣Dxx的特征值。已知協方差陣,給定k值,即可確定相應的橢球軸長。
2.4 誤差橢球軸向的確定
(14)式中的正交矩陣M=(aij)3×3即是從地心慣性坐標系OXYZ轉換到主軸坐標系OUVW的旋轉矩陣,由此可以確定橢球3個軸分別與Z軸的夾角。以軸OU為例,如圖5所示,OU軸與OZ軸的夾角為α(0°≤α<180°),OU軸在OXY平面的投影與OX軸的夾角為β(0°≤β<360°),由于M為旋轉矩陣,則可以直接根據旋轉矩陣的元素計算相應角度,并轉換到α,β規定的范圍內,即

圖5 橢球軸與地心慣性坐標軸的夾角示意圖
α=arccosa31
(20)
β可由a21,a31通過Matlab中雙變量反正切函數確定。
同理,可以計算OV和OW分別與OZ軸的夾角,及其在XOY平面的投影與OX軸的夾角。
3 衛星入軌位置在一定誤差范圍內的概率
根據概率密度函數(8)式和誤差橢球方程(19),衛星入軌在誤差橢球內的概率可寫為[18]
(21)
令
(22)
代入(21)式得到
(23)

(24)

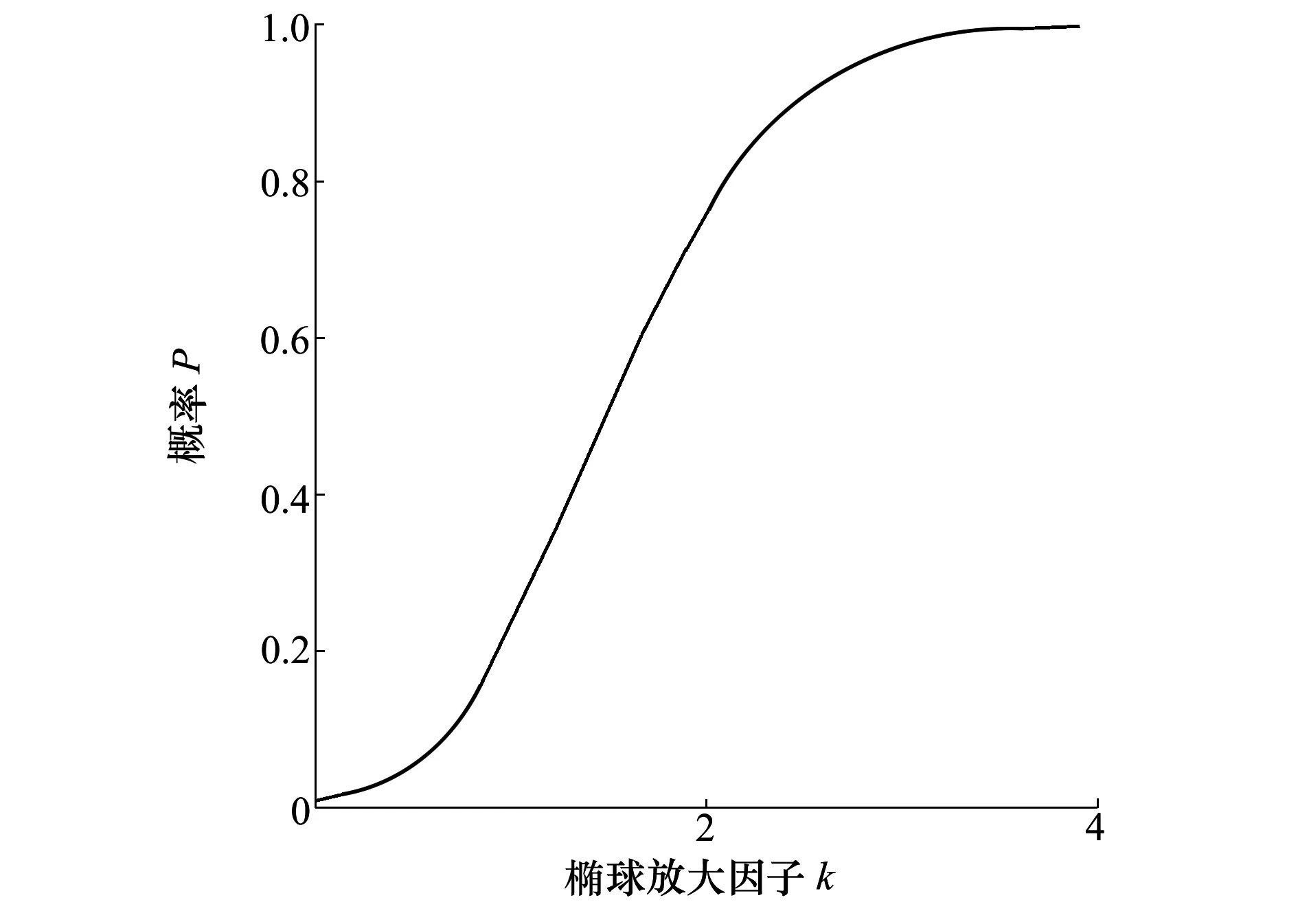
圖6 P與k的關系曲線圖
從圖6可以看出,在隨機誤差下衛星入軌位置基本都在4倍的橢球軸長范圍內。當然,衛星入軌位置在不同的誤差范圍內的概率亦可得到。
4 算例分析及仿真驗證
計劃一顆離地526 km的太陽同步圓形軌道衛星發射升空,在真近點角60°入軌,分析其在隨機因素影響下衛星入軌位置的隨機誤差。
4.1 確定相關參數
根據已知要求和給定條件,確定衛星相關參數。
衛星軌道位置采用六根數表示,地球半徑按6 378.14 km計算,則其軌道及位置參數如下:
軌道長半軸a=6 904.14 km;軌道偏心率e=0;軌道傾角i=97.5°;軌道近地點幅角ω=0°;軌道升交點赤經Ω=0°;衛星真近點角f=60°。
根據衛星研究所提供的經驗數值,依據(3)式確定軌道六根數的協方差陣DXX為
DXX=
(25)
衛星入軌位置在地心慣性坐標系下的位置表達式
(26)
將軌道參數期望值代入(26)式得到地心慣性坐標系下期望入軌位置
(27)
根據(11)式,對(26)式中x,y,z表達式分別對軌道六根數求偏導,并計算在近似值(期望值)的結果,得到偏導數矩陣A
(28)
根據(10)式得到地心慣性坐標系下的不確定性矩陣

(29)
將Dxx和rx,ry,rz代入(8)式即可得到該衛星入軌位置誤差橢球函數。
4.2 誤差橢球分析結果
對衛星入軌位置誤差橢球函數進行計算,得到正交矩陣M和對應的對角陣
(30)

(31)
據此確定衛星入軌位置誤差矢量。當放大因子k取1時計算結果見表1,當k取2.8時(95%的概率落在橢球范圍內)誤差橢球如圖7所示。

表1 橢球分析結果
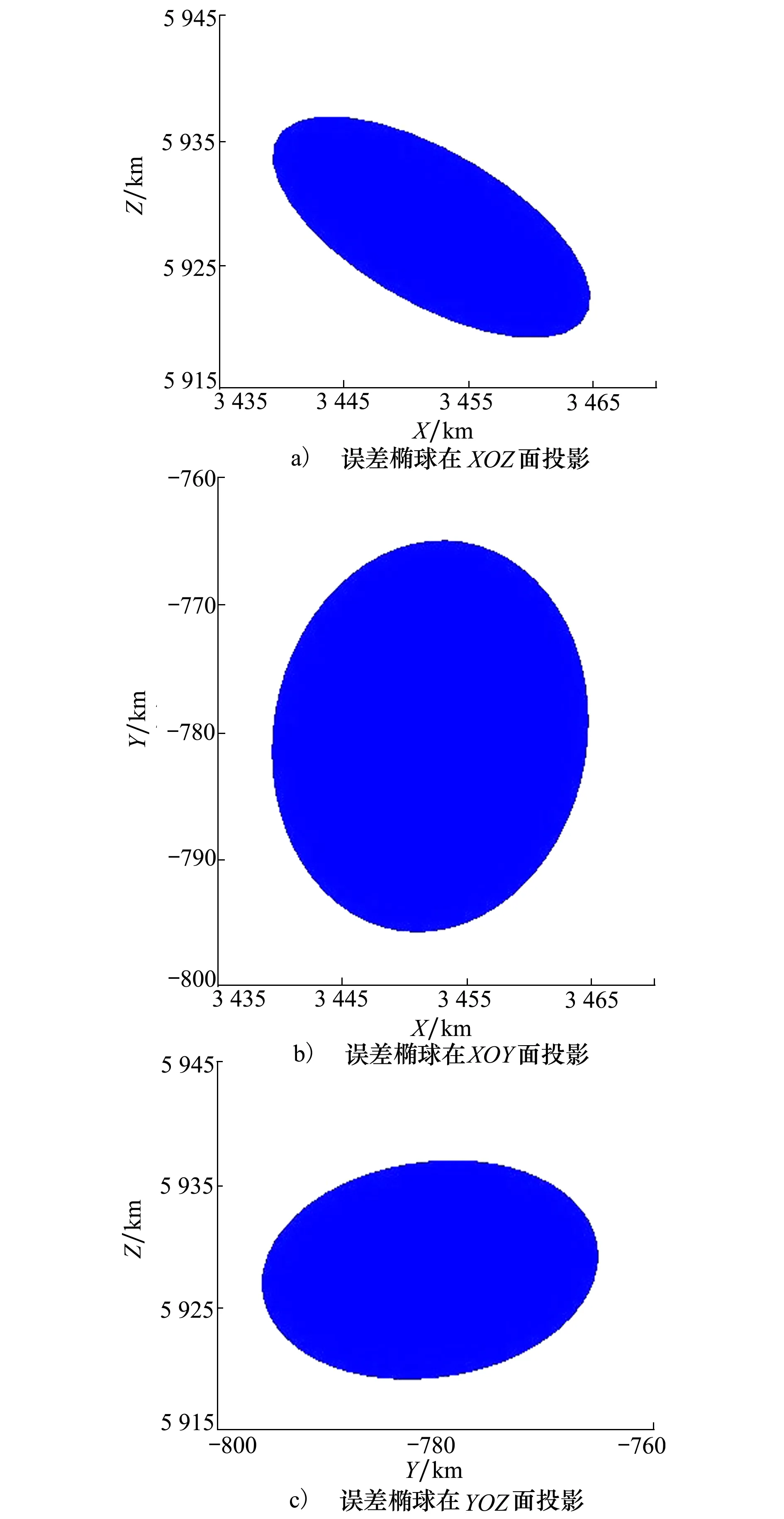
圖7 衛星入軌位置橢球仿真結果
進一步地,利用誤差橢球理論分析衛星在不同真近點角處的誤差橢球、軸長、軸向分別如圖8~10所示。
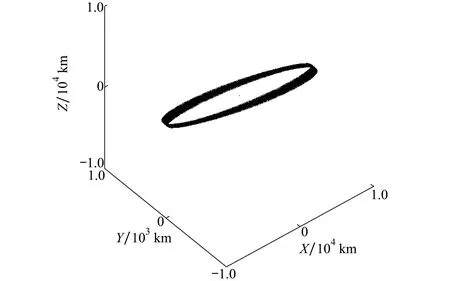
圖8 不同真近點角處誤差橢球示意圖

圖9 不同真近點角下誤差橢球三根軸長示意圖

圖10 不同真近點角處誤差橢球三根軸軸向示意圖
4.3 蒙特卡羅仿真結果
采用同樣的軌道六根數協方差陣(15)式,通過STK軟件模擬該衛星入軌位置仿真10 000次,則入軌位置分布如圖11所示。

圖11 蒙特卡羅仿真衛星入軌位置
對10 000次入軌位置求平均值,得到入軌位置x,y,z的平均值(3 452.056 888,-780.432 294 9,5 927.999 303),根據(7)式可得到入軌位置點位方差為15.191 1 km2,入軌位置中誤差為3.897 6 km,衛星入軌在一定誤差范圍內的概率用頻度表示,其概率密度直方圖如圖12所示。
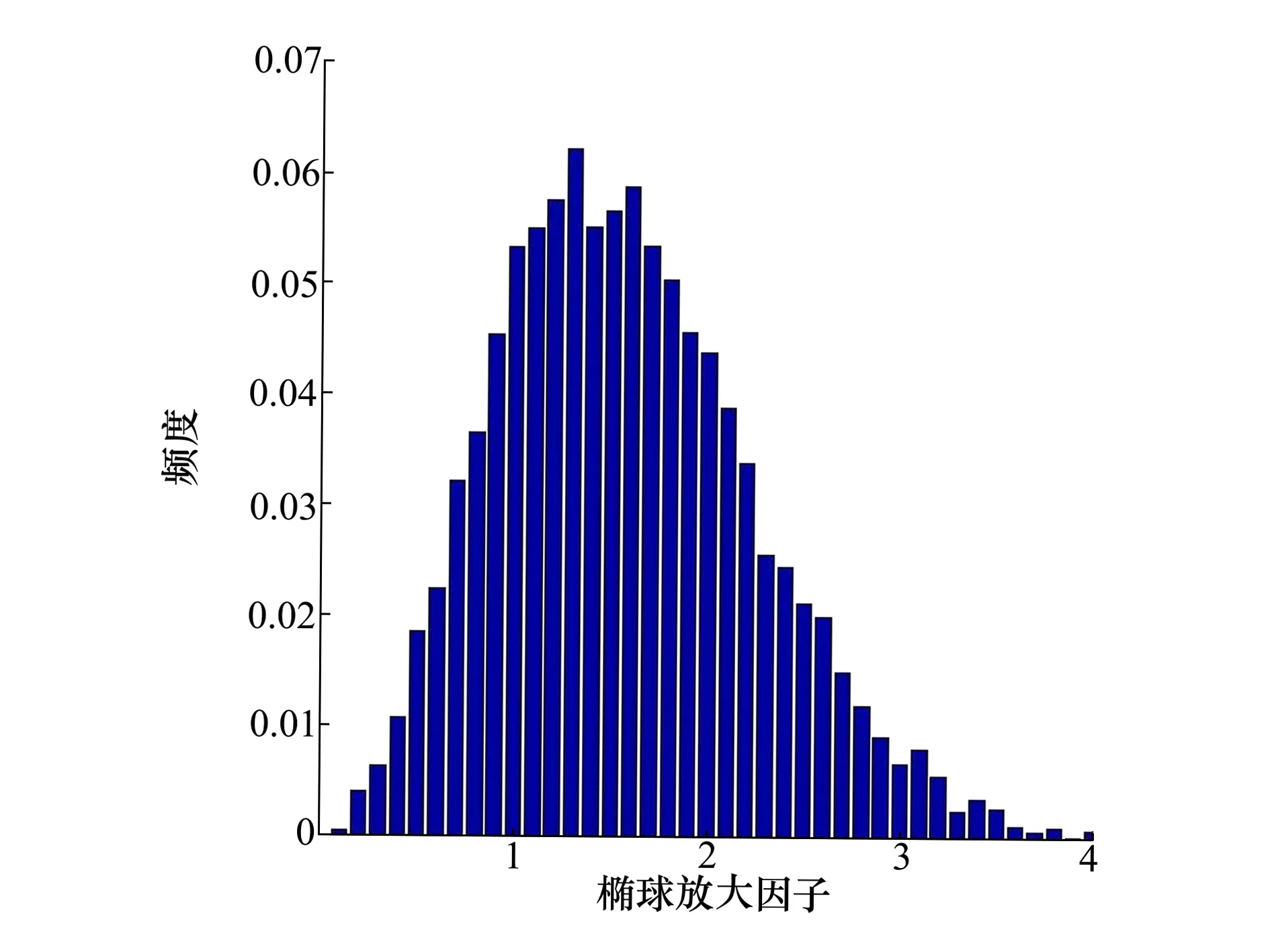
圖12 在一定誤差范圍內出現的概率直方圖
對蒙特卡羅仿真結果通過主成分分析,得到衛星分布橢球3個軸長及軸向,如表2所示。

表2 蒙特卡羅結果主成分分析
4.4 2種方法分析結果比較
從表1和表2的結果可以看出,誤差橢球分析和蒙特卡羅仿真結果非常接近。
為進一步驗證誤差橢球理論的合理性,在此采用提出的橢球模型計算衛星落入的概率,并與蒙特卡羅實驗仿真方法比較,在特定k值時,2種分析方法呈現的概率結果如表3所示。

表3 衛星落在一定誤差范圍內的概率
在放大因子k從0~4整個區間,誤差橢球理論估算的衛星入軌位置概率和模擬仿真的結果比較,如圖13所示。
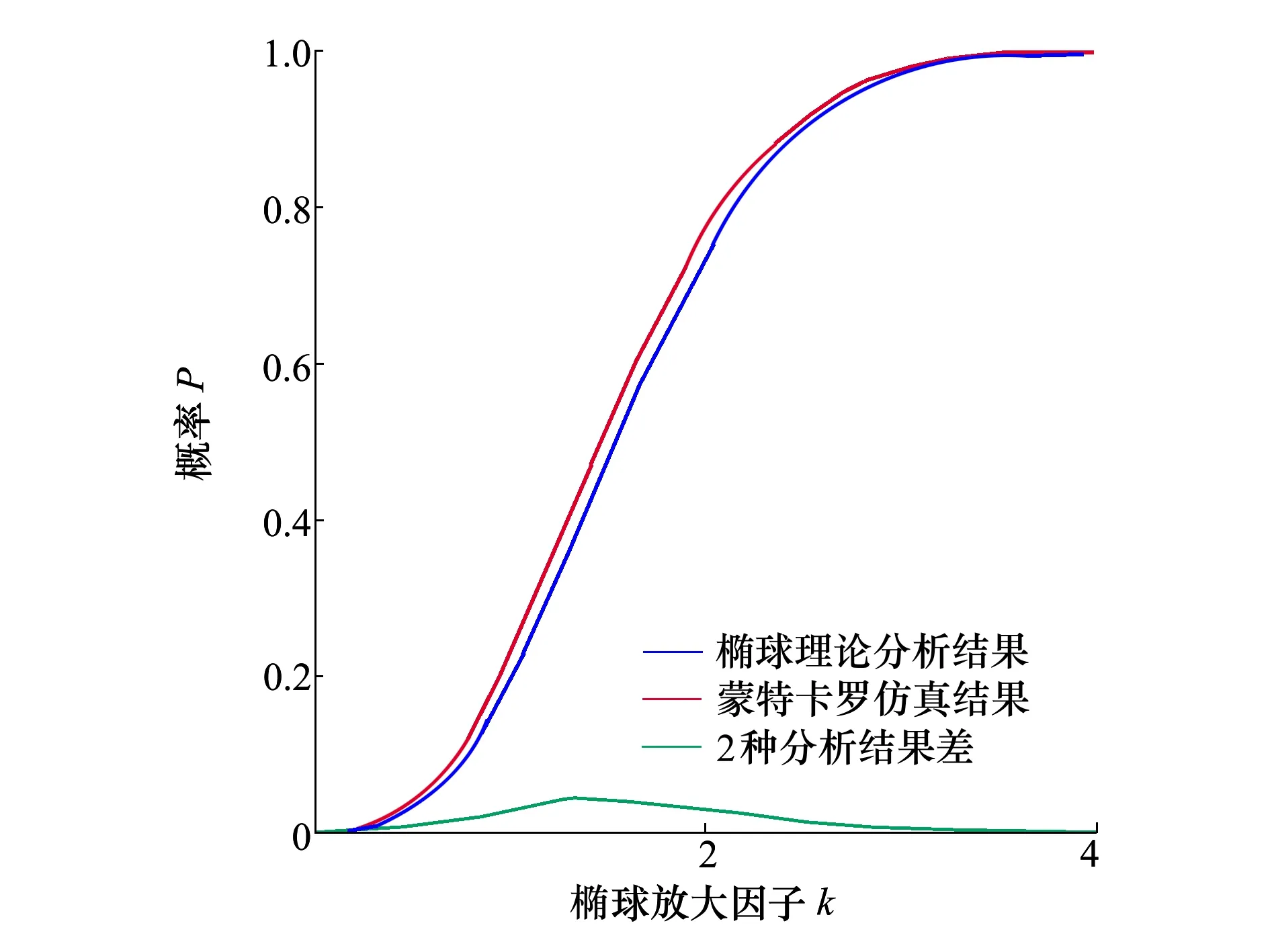
圖13 2種方法分析衛星入軌誤差概率曲線比較圖
從圖中可以看出,2個結果非常接近,且誤差橢球計算概率略低于蒙特卡羅仿真結果,說明該誤差橢球理論模型可以可靠地估計衛星在隨機誤差下的入軌位置。
5 結 論
本文構建了描述衛星入軌位置隨機誤差的一種橢球理論模型并驗證了其合理性。根據隨機誤差下入軌位置六根數的不確定性矩陣,把入軌位置隨機誤差等概率密度曲面近似為橢球,確定橢球三根軸的長度及軸向,并給出衛星入軌在一定誤差范圍內概率的計算方法。利用蒙特卡羅方法,借助STK軟件模擬了一顆低軌微納衛星在隨機因素影響下發射入軌的實驗,得到實驗衛星入軌位置實際分布,并與誤差橢球模型下入軌位置的概率分布對比,結果表明橢球模型分析結果與仿真結果一致,從而說明誤差橢球理論可以用于估計入軌位置隨機誤差,尤其是高效估計大規模星群位置誤差,對大規模星群設計及發射具有較好參考價值。
精確地估計衛星入軌位置隨機誤差,對于計算衛星運行中的碰撞安全、衛星對地覆蓋效果等都有很重要的意義,后期可以結合入軌位置誤差橢球理論及誤差傳遞特性進一步研究任意時刻衛星運行軌道的誤差及對效能的影響。