無人機載雙站干涉SAR系統關鍵技術分析與實驗驗證研究
2023-09-15 01:37:36朱金彪仇曉蘭劉玉泉董勇偉上官松濤劉鳴謙
雷達學報 2023年4期
關鍵詞:系統
朱金彪 潘 潔 仇曉蘭 蔣 雯 劉玉泉 董勇偉 李 威 藺 蓓 倪 帆 上官松濤 劉鳴謙 程 遙
①(西北工業大學電子信息學院 西安 710072)
②(中國科學院空天信息創新研究院 北京 100190)
③(蘇州市微波成像處理與應用技術重點實驗室 蘇州 215123)
④(中科宇達(北京)科技有限公司 北京 100190)
⑤(蜂巢航宇科技(北京)有限公司 北京 100071)
1 引言
干涉合成孔徑雷達技術[1](Interferometric Synthetic Aperture Radar,InSAR)通過干涉處理獲得地面目標的高度信息,可以實現高效率、大區域的地形測繪,自20世紀80年代提出以來,得到了飛速發展和廣泛應用。
雙站SAR[2]是一種收發天線分置于兩個不同平臺的SAR系統,是分布式多平臺SAR的最簡形式。由于雙站SAR的兩個平臺理論上可以任意分布,因此雙站InSAR系統可以突破單站雙天線干涉SAR的基線限制,獲得更加靈活的基線構型,滿足不同應用場景的需求,具有很大的應用前景。
目前,國內外已經發射多個雙站InSAR衛星星座,包括德國的TerraSAR-X/TanDEM-X和中國的陸地探測一號01組A/B星等。TerraSAR-X/TanDEM-X星座是國際上第1個星載雙站InSAR系統,通過從相距幾千米到僅200 m的編隊飛行,在3年內獲取了全球高精度數字高程模型(Digital Elevation Model,DEM)數據,相對高程精度達到2~4 m,絕對高程精度達到10 m[3,4]。中國于2022年發射的陸地探測一號01組衛星(LT-1),采用基于實時編隊構形的三維姿態導引與控制技術,有效提升了雙星長基線編隊飛行時的空間同步性能;并采用非中斷同步模式,解決了雙站星載SAR成像和相位同步不能同時進行的難題,大幅提升了相位同步精度[5,6]。該組衛星將為地質災害、土地調查、地震評估、防災減災、基礎測繪、林業調查等領域提供強有力的支撐。
相比于星載雙站InSAR,機載雙站InSAR不受軌道的限制,也可以規避長波段易受電離層干擾等問題,在實際觀測任務中有獨特的應用優勢。然而,機載雙站InSAR存在航跡控制、空時頻同步、運動補償等難點,因此在國際上成功開展機載雙站InSAR試驗的報道尚不多見。目前僅有的報道是歐空局于2018年5-9月開展的BelSAR雙站干涉實驗。BelSAR[7,8]雙站系統由兩架搭載L波段全極化SAR的Cessna208飛機組成,在比利時臨近Gembloux的BELAIR HESBANIA試驗場進行了5次飛行試驗,針對農業和土壤濕度開展了相關研究。國內在機載雙站SAR系統、雙站SAR成像等方面已有不少研究和實驗[9-11],但機載雙站InSAR系統和實驗還未見報道。
近年來,隨著SAR小型化技術和無人機技術的飛速發展,已經實現了無人機載重軌干涉SAR系統和無人機載雙/多天線干涉SAR系統,其中無人機載重軌干涉SAR系統[12]受到時間去相干的影響,而無人機載雙/多天線干涉SAR系統[13,14]則受限于載機平臺體積和載重的限制,基線長度和構型配置不夠靈活,在應用中受到局限。為此,利用無人機平臺實現分布式雙/多站干涉SAR系統是解決上述問題的有效方案,并且當前利用無人機平臺實現無人機載雙站InSAR已經成為可能。為了達到較高的高程反演精度,雙站InSAR對時間和相位同步的要求非常嚴格[15-17],并且相比于星載雙站InSAR和機載單站雙天線InSAR而言,無人機載雙站InSAR在同步技術及對應的補償處理上均具有更大的難度。如何結合無人機載小型化SAR在體積、重量、功耗方面的限制要求,并結合高精度的同步誤差補償和運補成像處理技術,達到期望的干涉測量精度,是無人機載雙站InSAR的核心難點。因此結合無人機載雙站InSAR系統開展系統關鍵技術和相關數據處理方法的研究具有重要意義。
為了推進無人機載雙站InSAR技術研究,中國科學院空天信息創新研究院牽頭研制了一套擬達到0.5 m測高精度的無人機載L波段全極化InSAR系統,并于2022年8月17-29日在內蒙古達爾罕茂明安聯合旗百靈機場開展了首次飛行實驗,初步驗證了系統的基本性能和指標。本文簡要介紹了該系統的基本構成和主要性能并介紹了該系統的關鍵技術,給出了首次飛行實驗的方案和實施情況,提出了無人機載雙站InSAR的整體處理流程和方法,給出了實驗數據處理結果,驗證了處理方法的有效性和該無人機載雙站InSAR系統的基本性能指標。
2 無人機載雙站InSAR系統及關鍵技術
本文介紹的無人機載雙站InSAR系統由兩架固定翼無人機HC140組成載機編隊,分別搭載L波段高分辨率全極化SAR(主站)和全極化接收系統(從站)。本節描述了該系統設計方法、系統構成和載荷參數,并重點介紹該系統的3大關鍵技術。
2.1 無人機載雙站InSAR系統設計
本無人機載雙站InSAR系統的設計主要包括確定臨界基線、設計雙站干涉SAR的構型(主要是入射角和基線角)和分配各項誤差3個方面。
首先根據需要的空間去相干后的相干系數γg計算臨界垂直基線Bv[18],
其中,λ為波長,R為斜距,θ為入射角,一發雙收Q=1,自發自收模式Q=2,ρr為斜距分辨率。本無人機合適的飛行高度為2 km,同時為了使得同步鏈路通暢,兩架無人機盡量保持同一高度水平分布,此時中心入射角設置為45°比較合理,能夠兼顧地距分辨率和高程測量精度。在上述參數以及0.5 m分辨率的條件下,為了使得相干系數能夠達到0.975以上,Bv需要不超過34 m。因此,此處設計34 m的有效基線,也即42.43 m的水平間距。
干涉相位噪聲與相干系數的關系通常表示為[18]
其中,L為視數。當相干系數在0.97以上,視數大于16時,干涉相位噪聲能控制在2.54°以內。對于雙站InSAR系統而言,干涉相位噪聲和相干系數還會受到空間同步誤差的影響。如果主/從站存在較大的空間同步誤差,使主/從天線波束覆蓋范圍有較大偏差,則觀測區域內的天線增益會受到影響,從而影響從站的回波信噪比,使得干涉相位噪聲變大。同時,波束范圍覆蓋的偏差,也會使得主站回波和從站回波的中心頻率存在偏差,引起相干性的降低。為此,通常要求空間同步誤差不能導致明顯的中心頻率偏差,不能明顯降低多普勒處理帶寬內的回波信噪比,如要求考慮空間同步誤差后系統靈敏度優于-30 dB。本系統的靈敏度達-40 dB,對空間同步誤差有較好的容忍性。
除了上述空間去相干和空間同步誤差的影響外,系統設計中考慮的誤差因素還包括由運動誤差和航跡測量誤差導致的運動補償殘余誤差[19]、時間和相位同步誤差、基線長度誤差、基線角誤差等。
將無誤差的理想情況下的干涉相位、基線長度、基線角分別記為?1,B1,α1。記?2,B2,α2分別為考慮上述誤差后的干涉相位、基線長度和基線角,則有
其中,?φ1為運動補償殘余誤差導致的干涉相位誤差,其與航跡控制精度和成像處理時的參考高程與實際高程的偏差有關,具體模型參見文獻[19],根據分析計算,當交軌向航跡控制精度優于1 m,成像參考高程精度優于100 m時,運補殘余引入的干涉相位誤差小于1°;?φ2為同步鏈引入的干涉相位誤差,其主要是相位同步引入的誤差,時間同步主要影響回波數據的有效錄取和回波包絡的對齊,從而影響成像處理精度,間接影響干涉相位精度,本系統中時間同步引入的包絡誤差要求達到0.1個采樣間隔內,基本不影響成像精度;?φ3為去相干引入的相位誤差,?B為 基線誤差,?α為基線角誤差。
考慮誤差前后的目標高度表達式如下[18]:
其中,h1為理想情況下干涉反演的目標高度,h2為考慮多種誤差因素后干涉反演的目標高度。因此,多種誤差因素導致的目標高程誤差為
若進一步考慮坡度影響,目標的高度可以表示為
其中,αp為坡度角,詳見文獻[20]。
基于上述誤差分析模型,可以開展數值仿真,得到不同誤差下對應的高程反演精度,從而得到可取值的誤差范圍,并根據實際系統工程可實現的精度進行折中考慮。本無人機載雙站InSAR系統考慮的多種誤差并進行誤差分配后,理論上的高程反演精度情況如表1所示。
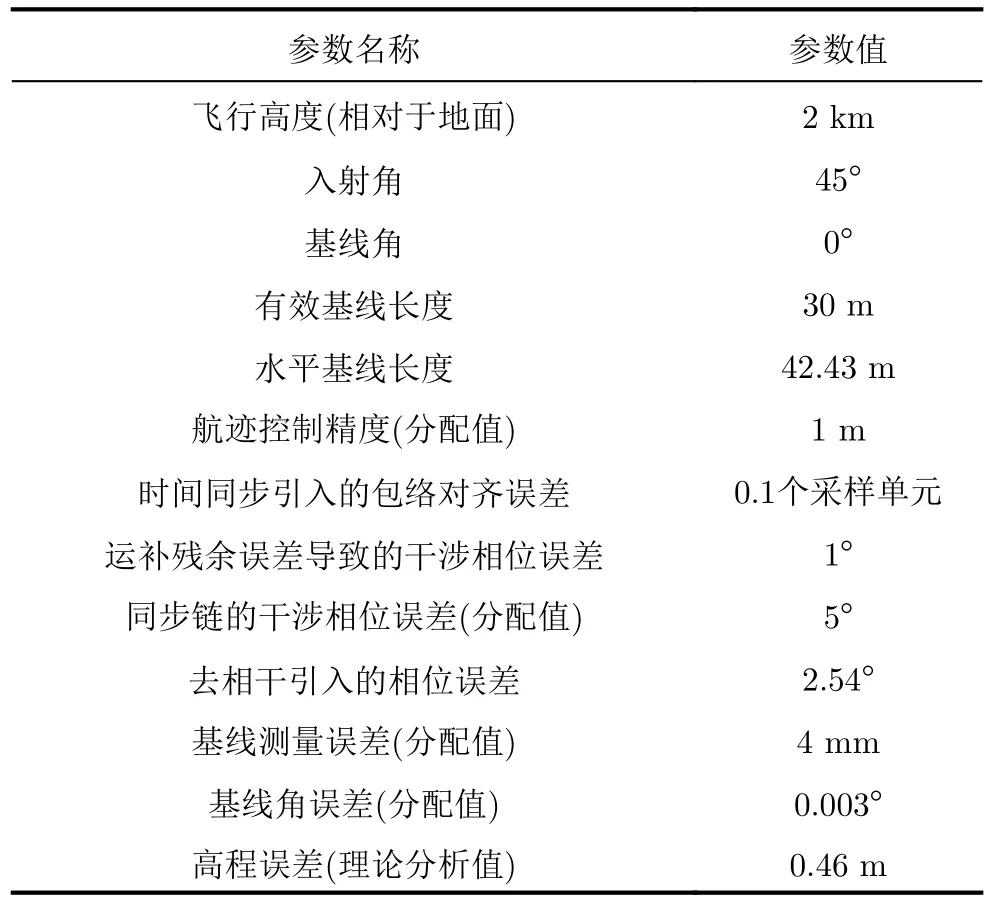
表1 無人機載雙站InSAR系統誤差分配Tab.1 Systematic error distribution of UAV-borne bistatic InSAR
2.2 雙站干涉SAR系統構成
通過上述系統方案設計,本文無人機載雙站干涉SAR系統的總體構成如表2所示,其主要由LSAR(主站)、L-接收系統(從站)、無人機雙機編隊及位姿測量系統4部分組成。SAR載荷的實物圖如圖1所示,將其掛載于無人機平臺后整個系統的照片如圖2、圖3所示。
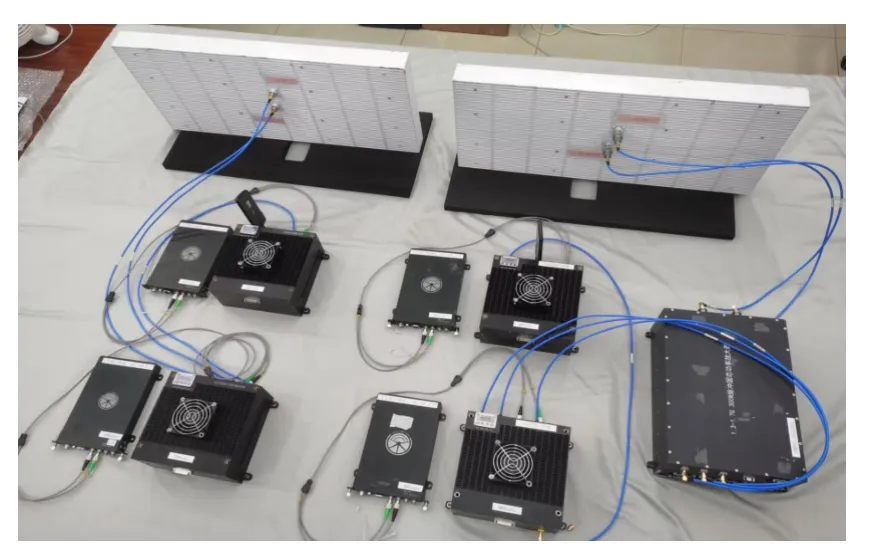
圖1 雙站干涉SAR及雙向同步鏈實物圖Fig.1 Bistatic InSAR and bidirectional synchronous chain

圖2 主站L波段全極化SAR和雙向同步鏈集成Fig.2 Master L-band full-polarization SAR and bidirectional synchronous chain integration

圖3 從站L波段雙極化接收系統和雙向同步鏈集成Fig.3 Slave L-band dual-polarization receiving system and bidirectional synchronous chain integration
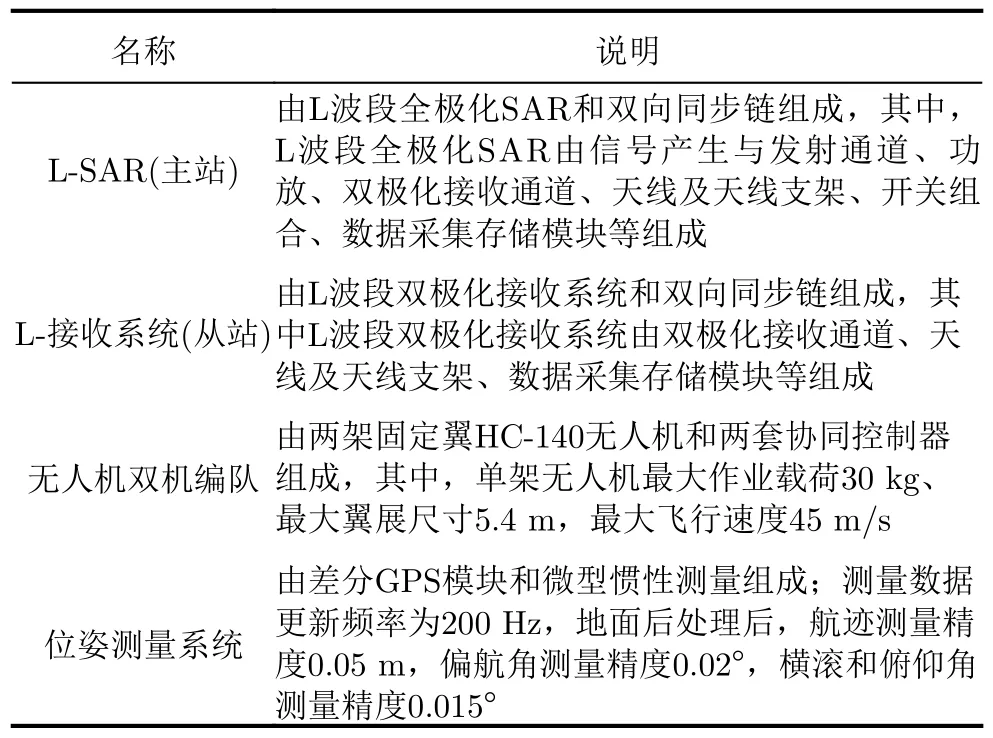
表2 無人機載雙站InSAR系統總體構成Tab.2 Overall composition of the UAV-borne bistatic InSAR system
L-SAR(主站)、L-接收系統(從站)是無人機載雙站干涉SAR系統的核心,該SAR載荷的主要參數如表3所示。
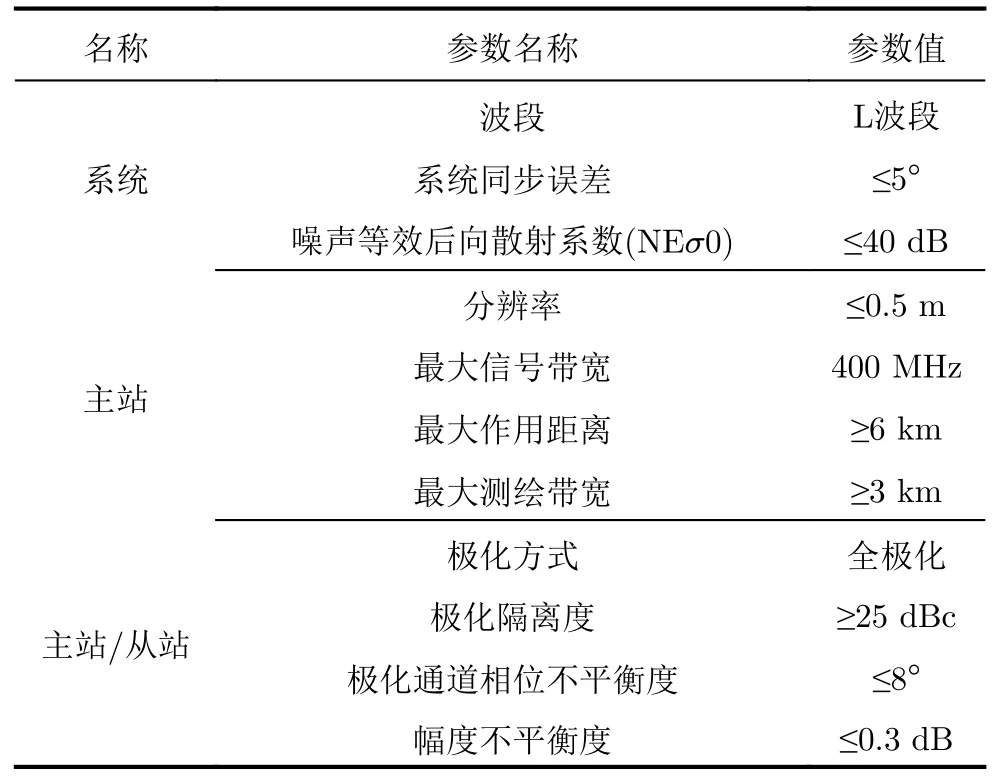
表3 L-SAR載荷參數Tab.3 L-SAR load parameters
2.3 系統關鍵技術
在無人機載雙站干涉SAR系統的研制過程中,取得突破的主要關鍵技術包括以下3個:無人機編隊飛行協同(也即空間同步)、時間與相位同步和無人機雙站InSAR數據處理,下面將重點介紹這3大關鍵技術。
2.3.1 無人機編隊飛行協同定位與控制技術
雙站InSAR為實現0.5 m測高精度指標,要求兩架分別搭載主站SAR和從站SAR的編隊飛行無人機具備較高的空間同步能力,其交軌基線范圍在20~50 m,且誤差范圍在3~5 m,雙機順軌間距不大于10 m。同時,在雙機距離較近條件下,還會產生避撞等問題,這對無人機雙機編隊定位精度及定位可靠性提出較高要求。本文介紹的無人機雙機編隊從兩個方面提高飛行定位精度,一是采用差分GPS模塊將單機位置測量精度提高到3~5 cm;二是設計開發專用的協同傳感器,在兩架飛機上各安裝一套,實現雙機編隊協同通信與飛行定位。通過采用雙機編隊實現雙站InSAR要求的交軌基線及精度指標的方法,在國內尚屬首次。
協同飛行定位與控制采用超寬帶(Ultra Wide Band,UWB)定位技術[20,21],通過發送和接收具有ns或ns級以下的極窄脈沖來傳輸數據,使系統具有GHz量級的帶寬。如圖4所示,建立雙向飛行時間方法,即每架無人機UWB定位模塊從啟動開始即會生成一條獨立的時間戳,模塊A的發射機在其時間戳上的Ta1發射請求性質的脈沖信號,模塊B在Tb2時刻發射一個響應性質的信號,被模塊A在自己的時間戳Ta2時刻接收。以此可以計算出脈沖信號在兩個模塊之間的飛行時間,從而確定飛行距離S:
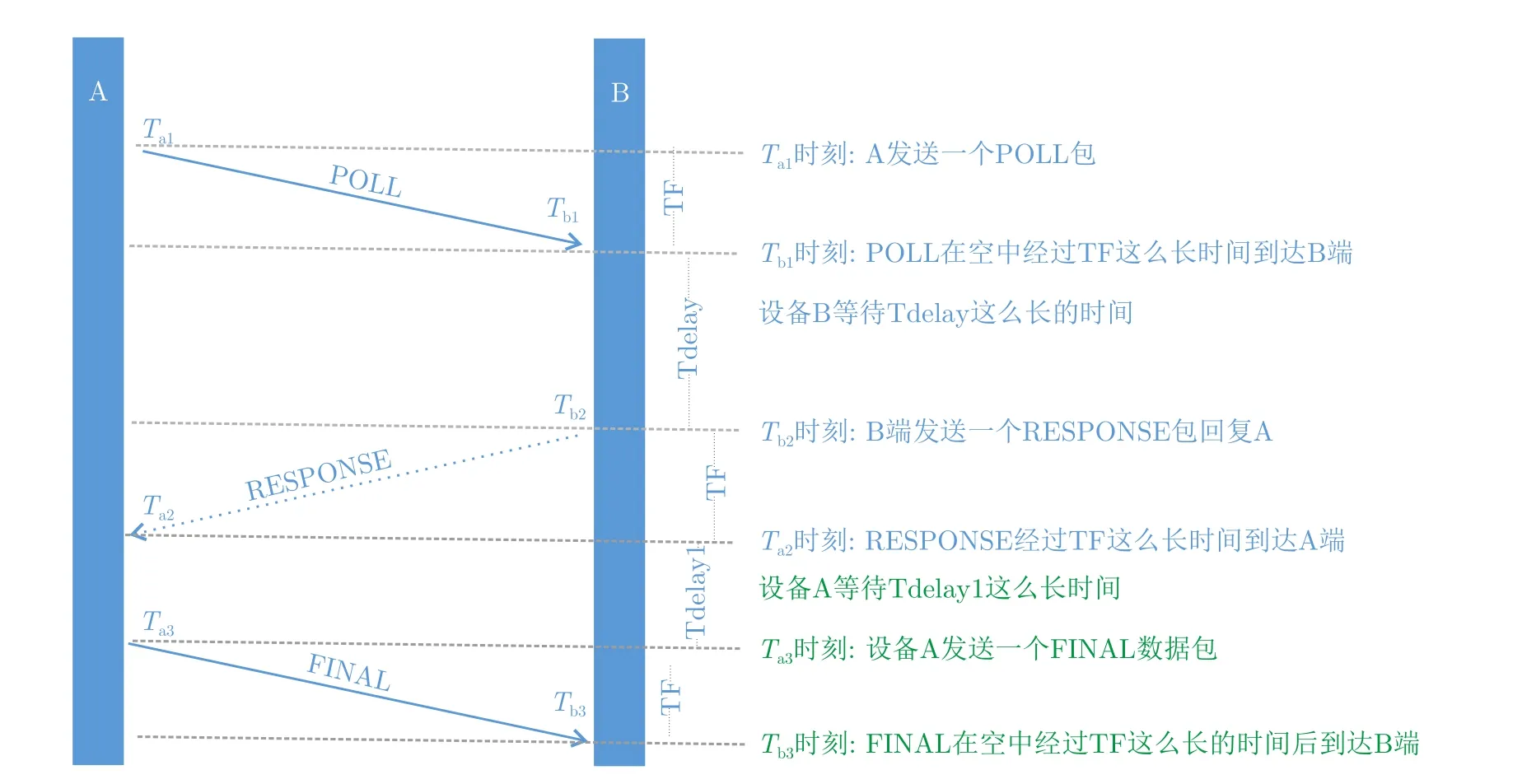
圖4 雙向飛行時間法Fig.4 The method of two-way time-of-flight
其中,c為光速。
如圖5所示,無人機A上設置UWB基站,無人機B上設置UWB標簽。通過UWB算法計算出雙機相對距離并發送給協同控制器。同時,協同控制器接收差分GPS模塊信息,通過衛星定位信息計算出雙機相對位置。
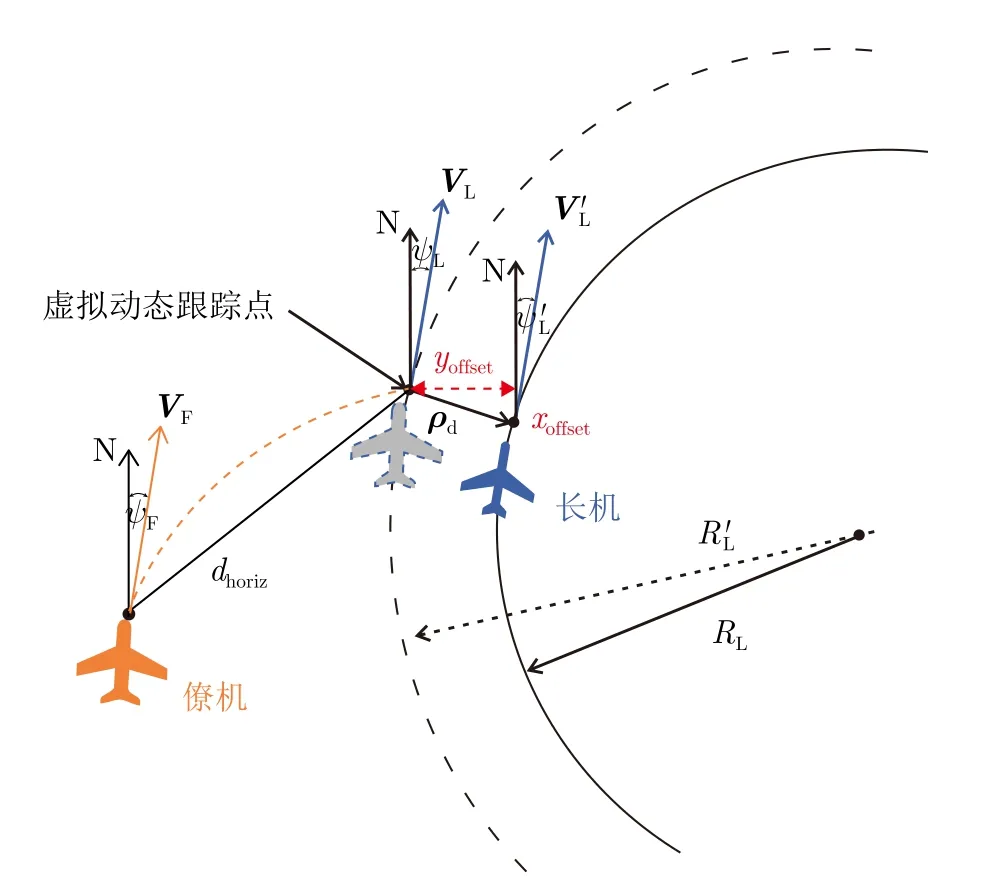
圖6 長機-僚機編隊橫航向運動Fig.6 Leader-follower formation movement
其中,ω為長機的航向角速度。
協同控制器通過衛星定位獲取雙機編隊的地理位置,通過UWB模塊測距獲取編隊相對位置,最終通過融合算法,將衛星定位解算的雙機相對位置與UWB解算的雙機距離進行對比,形成UWB測距與差分GPS定位互為補充的測量方法,大幅提高了編隊定位與控制精度,有效保證了空間同步。
其中,UWB測距和差分GPS定位的融合方法采用卡爾曼濾波器進行實現,具體來說,將UWB測距和差分GPS定位的測量結果作為卡爾曼濾波器的輸入,通過卡爾曼濾波器對兩種測量結果進行融合,得到更加準確的位置和速度信息。整個融合處理方法與流程如圖7所示。
2.3.2 時間與相位同步技術
時間同步是無人機載雙站InSAR系統的一個核心問題,指的是相互獨立的主站與從站之間的時鐘對準,或者時鐘誤差測量與補償問題,它對主/從站獲得數據的有效性至關重要[22,23]。相位同步是無人機載雙站InSAR系統的另一個核心問題與關鍵難點,它直接影響了主站和從站復圖像對的相干性和干涉相位的精度。
本文介紹的無人機載雙站InSAR系統采用雙向同步鏈[24-26]實現時間和相位同步。該同步鏈采用雙站間信號對傳的方案,即主站發送同步信號給從站后,從站經過一定的延時,發送從站的同步信號給主站,實現雙向同步信號的傳輸,主從站各自記錄同步信號供后續成像處理使用。圖8為雙站干涉SAR系統雙向同步鏈的示意圖。
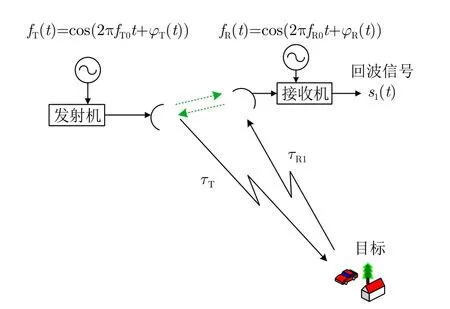
圖8 雙站InSAR系統雙向同步鏈示意圖Fig.8 Diagram of the bidirectional synchronous chain of bistatic InSAR system
其中,雙站SAR時間同步主要保證回波錄取窗口的合理性和回波包絡的正確性。本系統在回波錄取窗口的觸發上,則采用各自的晶振,按照固定的脈沖重復頻率來觸發。上述時間同步方法也是星載雙站SAR系統中常用的技術方案,然而本無人機載雙站SAR出于成本考慮,主站和從站晶振穩定度相對星載SAR而言要低幾個數量級,本系統的晶振穩定度為10-7量級,因此需要額外考慮其時間同步對回波接收窗口的影響,并采取補償措施。為此,本系統針對較低穩定度晶振下,隨著開機后系統工作時間的增加,從站回波數據接收窗口相對主站而言存在時間漂移而影響有效回波的采集的問題,根據漂移量預設了一個以6.3 s為周期、1 μs為偏移量的回波錄取窗口補償機制,該機制會使得回波數據呈現鋸齒狀,如圖9(a)所示。為此,本文在數據處理中,首先根據周期性的時間補償機制將回波進行搬移補齊,使得回波包絡連續。然后對主/從站記錄的同步信號進行脈沖壓縮和峰值相位提取,并對提取的相位作差得到差值的二分之一相位?syn(t),對該相位進行線性擬合,即可得到主站和從站的晶振頻差,如下:
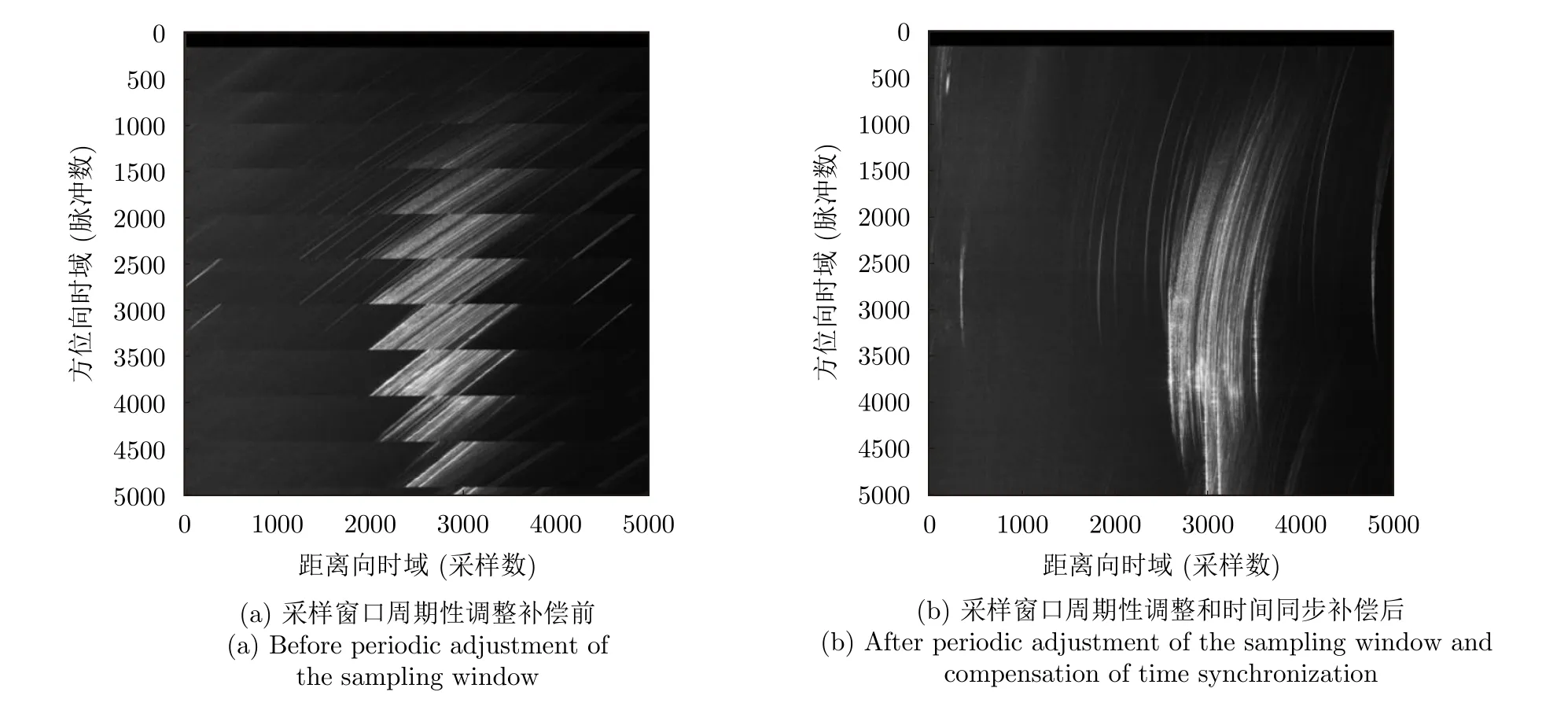
圖9 從站回波距離壓縮后的結果Fig.9 The results of range compression of the slave echo
據此對從站回波距離采樣進行移位,也即在從站回波的距離頻域補償線性相位:
其中,t為以第1個回波脈沖方位時間為參考0時刻的方位時間,第j個回波脈沖的方位時間t=j/PRF,P RF為脈沖重復頻率。由此即可得到回波包絡誤差補償后的結果,如圖9(b)所示。
在上述時間同步誤差導致的包絡誤差補償基礎上,即可進行相位同步補償,相位同步補償的方法是分別對主站和從站接收的同步鏈信號進行脈沖壓縮和峰值相位提取,并求兩個相位的差值,其差值的二分之一就是同步相位的補償項,用于補償從站回波的相位同步誤差。
圖10為雙站干涉SAR系統地面靜態測量結果,其為采用雙向同步鏈技術,從站雷達同步信號脈沖壓縮并進行距離采樣包絡移位和相位同步誤差補償后的結果,其可體現同步鏈本身的精度。可見時間同步殘余的包絡誤差小于0.1個采樣點(采樣率1.25 Gsps),即0.08 ns;相位同步補償后殘余的隨機相位誤差小于±0.4°。
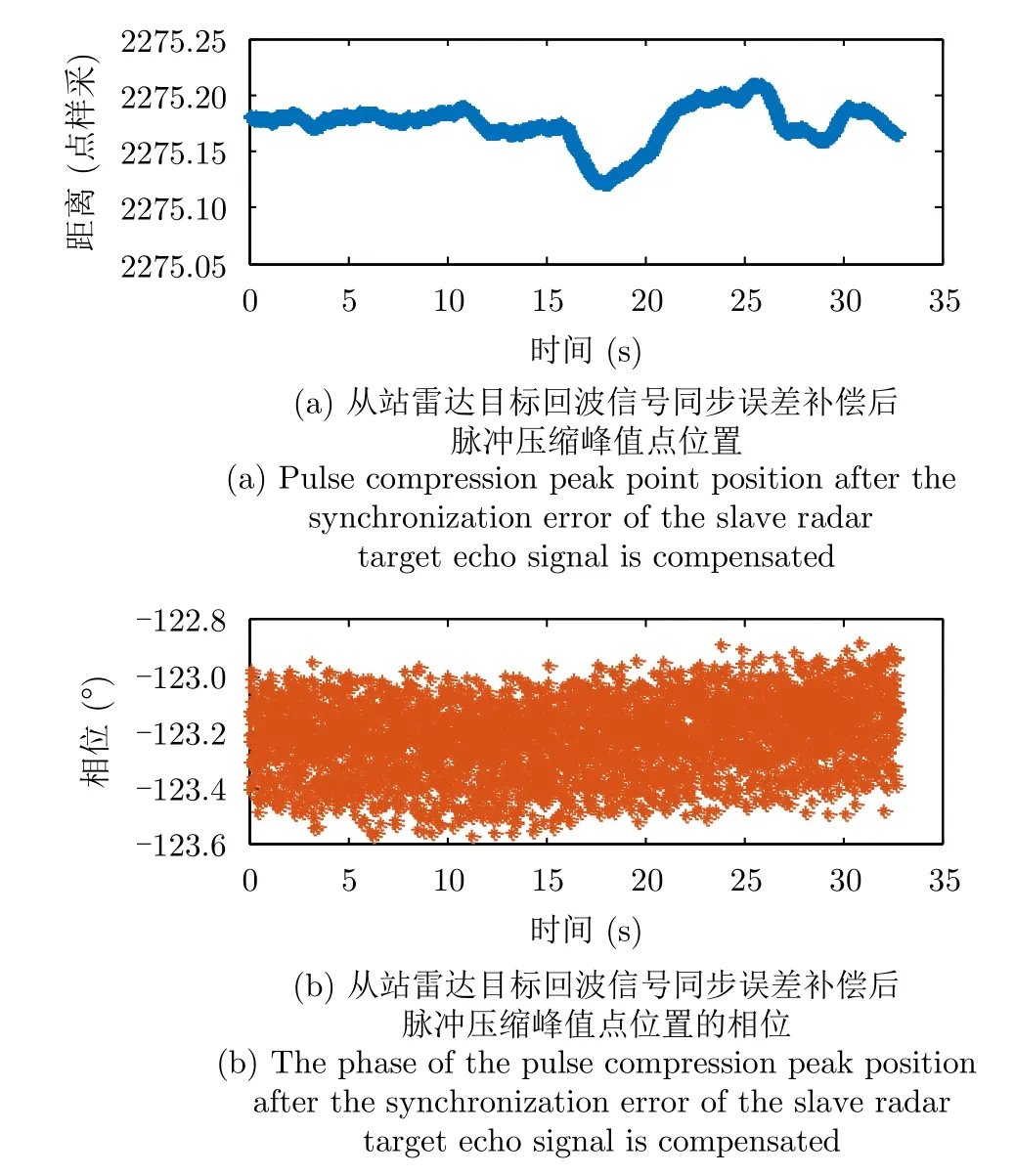
圖10 從站雷達時間和相位同步后的測量結果Fig.10 Measurements after time and phase synchronization of slave radar
2.3.3 無人機載雙站InSAR數據處理技術
在同步誤差補償后,無人機載雙站InSAR的處理流程與星載雙站InSAR的后續處理流程[27]類似,包括主站和從站的成像處理、復圖像配準、基線等干涉系統參數標定、干涉相位濾波解纏、DEM生成等步驟。其中,本系統有別于現有星載雙站In-SAR處理方法的關鍵技術在于面向干涉的無人機載雙站SAR的高精度成像處理。
由于無人機載SAR飛行高度相對較低,且易受到氣流的影響偏離預定直線航線,從而形成相對較大的運動誤差,同時主站和從站的運動誤差并不相同,如果運動補償不夠精細,主站和從站所殘余的不同的運動誤差會帶來相位誤差從而影響干涉SAR高度反演精度。為此本文提出一種能夠更好地補償運動誤差距離和方位空變性的運動補償算法。
其首先基于主站和從站的高精度慣導數據通過最小二乘方法確定雙站SAR共同的速度矢量,并擬合兩條平行的直線。接著,采用一步運動補償[28]算法以能夠更好地應對運動誤差隨距離向的空變性。對于主站而言,運補參考航跡為主站擬合的直線;對于從站而言,則基于發射和接收兩條參考航跡進行運動補償[29]。隨后對回波數據進行方位向重采樣,對于主站直接基于主站慣導數據和主站回波脈沖時間戳進行方位重采樣;對于從站而言,則采用雙站SAR的方位重采樣方法[22]得到準確的方位向重采樣結果。接著基于一種多普勒帶寬分割和子孔徑圖像合成的高精度運動補償結合ω-k算法的成像方法,進行回波數據的運補和成像。該方法通過劃分方位子孔徑,對子孔徑數據進行成像并采用PTA方法進行孔徑內的運動補償,最后對子孔徑圖像進行相干合成,可以更好地補償運動誤差的距離和方位空變性,更好地滿足無人機載InSAR成像的要求。對于從站而言,由于基線較短,可使用主站和從站位置的中心作為雙站SAR的等效中心位置,采用雙站SAR的雙曲等效近似模型進行ω-k算法推導,并采用與單站SAR一致的運補和成像方法進行處理。整個成像處理方法流程如圖11所示。
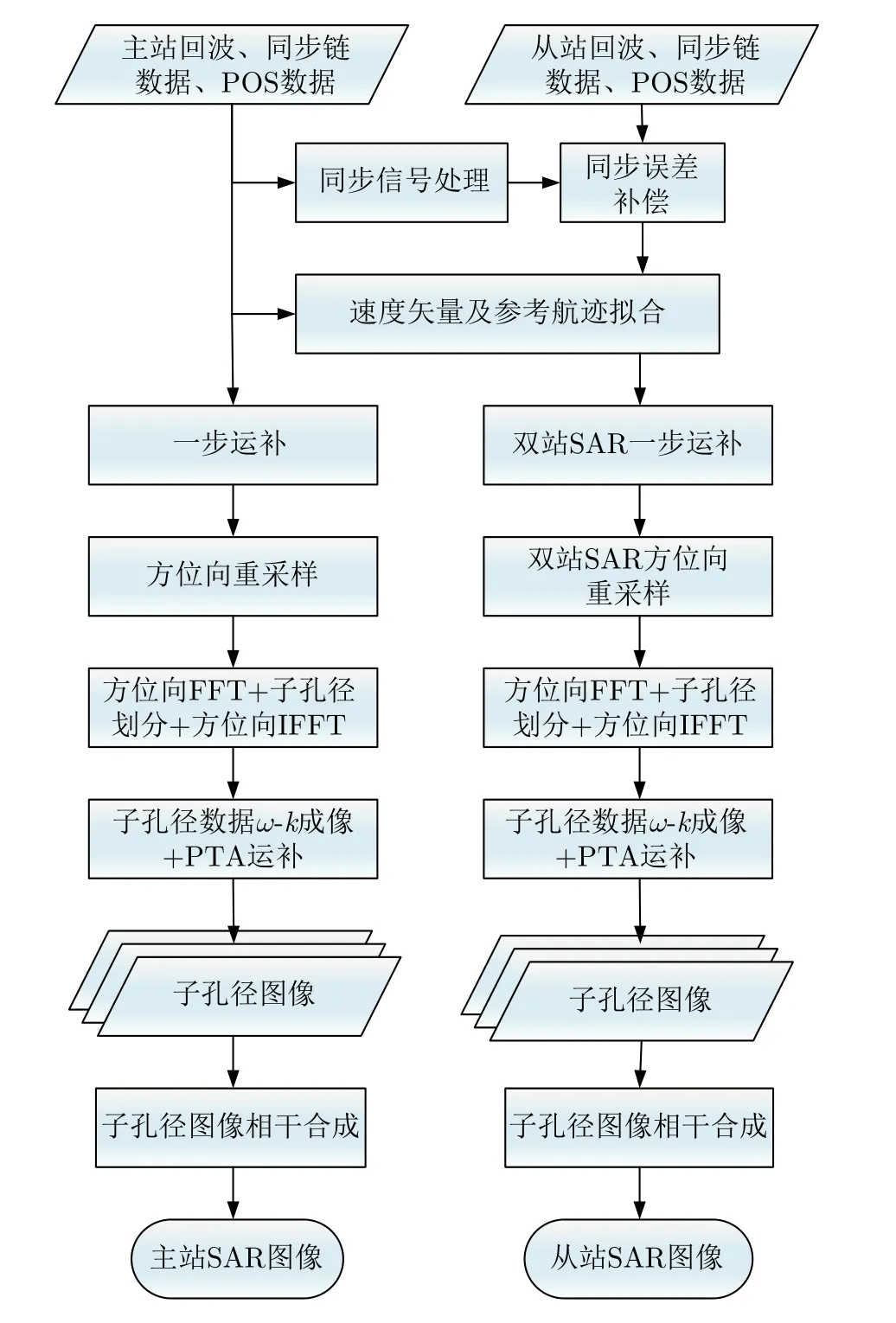
圖11 無人機載雙站InSAR成像處理流程圖Fig.11 Flow chart of UAV-borne bistatic InSAR imaging processing
3 無人機雙站L波段干涉SAR校飛試驗
在上述關鍵技術研究基礎上,為了驗證無人機雙站L波段InSAR系統的基本性能指標、協同飛行交軌干涉基線范圍以及系統高程反演能力,我們于2022年8月17-29日,在內蒙古達爾罕茂明安聯合旗百靈機場開展了首次集成校飛實驗。
3.1 實驗對象
實驗對象為百靈機場,由航站樓和機場跑道組成,占地面積391800 m2。其中,機場跑道區域長1200 m,寬176 m,周邊人工建筑較少,地形平坦,比較空曠,除機場建筑等目標外,地物后向散射較弱,便于進行定標器布設。
3.2 航線及基線設計
雙站InSAR為了兼顧航高限制、成像范圍、最大不模糊高度、無人機航跡控制精度等因素,通過理論分析和仿真實驗優選設計了兩組飛行模式參數,模式1飛行相對高度1 km,雙機飛行水平間距30 m,中心視角45°,成像幅寬為1.44 km;模式2飛行相對高度2 km,中心視角45°,雙機飛行水平間距50 m,成像幅寬為2.88 km,如表4所示。

表4 雙站InSAR構型參數Tab.4 Configuration parameters of bistatic InSAR
無人機實際飛行航線如圖12所示,飛機右側視觀測,主要成像區間為圖中自北往南和自南往北的兩段航跡,其余用于無人機轉彎和隊形調整等。典型成像段的航跡和姿態測量數據如圖13所示,可見,主/從站航跡控制較好,不僅兩個航跡的一致性較好,且與理想直線航跡的偏差在1 m以內,滿足本系統分配的航跡控制精度指標;主/從站各自的姿態角變化在2°以內,對多普勒中心頻率的影響在10 Hz以內,說明其數據獲取條件較好,姿態波動相對較小;主/從站偏航角存在1.7°左右的差異,該差異導致的中心頻率差異約在3.5 Hz,對成像處理的影響在可接受的范圍內。無人機載雙站InSAR飛行照片如圖14所示。

圖12 無人機飛行航線Fig.12 UAV flight route
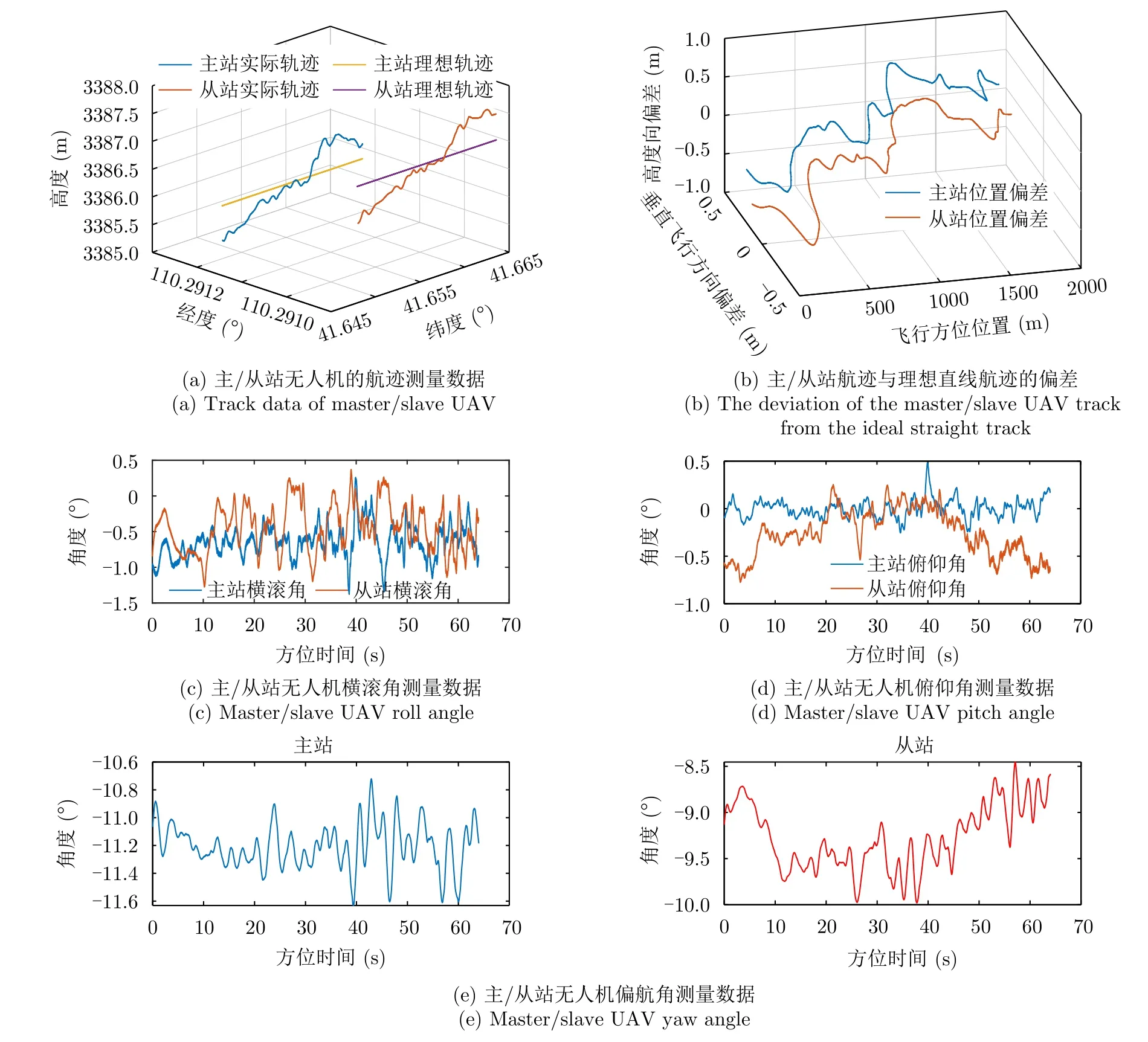
圖13 無人機載雙站InSAR飛行的典型航跡和姿態測量數據Fig.13 Typical trajectory and attitude measurements of UAV-borne bistatic InSAR
圖14 無人機載雙站InSAR飛行照片Fig.14 Photo of UAV-borne bistatic InSAR
3.3 定標器布設
為了支撐斜距、基線、通道幅相誤差、極化等參數的標定和干涉高程反演結果精度的充分驗證,本次實驗中布設了21個定標器,其中:三面角14個(J1-J14),包括4個0.9 m三面角、3個0.7 m三面角,7個0.5 m三面角;二面角7個(J15-J21),其中3個0°二面角,3個45°二面角,1個22.5°二面角。這些定標器可以組成三組極化定標器組,每組1個三面角、1個0°二面角、1個45°二面角,另1個22.5°二面角用于判定模糊解,這些定標器用以支撐極化定標。此外,其余的11個三面角反射器部分用于干涉定標,其余則可用于極化和幾何精度的驗證。定標器布設的光學影像示意圖及SAR圖像中的分布圖見圖15,其中散射強度相對較弱的定標器在圖15(b)中放大顯示,場地中未標注的其他強散射點來自路燈、旗桿、指示牌等。典型定標器的現場照片見圖16。采用差分GPS對上述定標器的三維位置進行了精確測量,三維位置精度為5 cm。需要說明的是,如表4所示,本文雙站SAR實驗中的雙站角小于1°,而二面角、三面角反射器在俯仰向具有較寬的波束范圍,因此其可用于本雙站SAR實驗的極化和干涉定標。
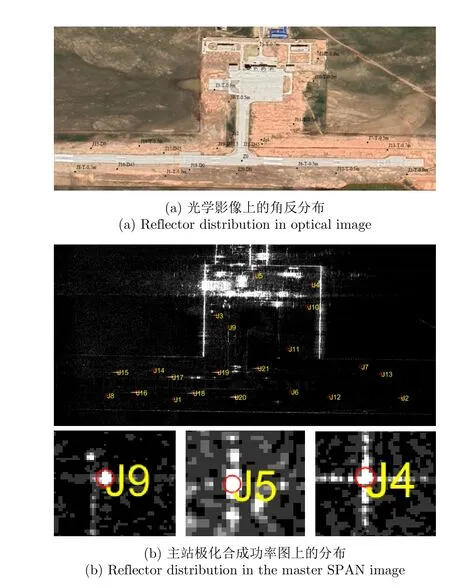
圖15 定標器分布圖Fig.15 Diagram of reflector distribution

圖16 定標器布設照片Fig.16 Photos of reflector layout
4 無人機載雙站InSAR實驗數據初步處理結果
下面以2022年8月26日飛行的1000 m高度、水平間距30 m的實驗數據為例,給出無人機載雙站InSAR的處理結果。
4.1 雙站InSAR成像結果
采用本文2.3.3節的同步誤差補償和運補成像方法進行成像處理后,得到主、從站的圖像和分辨率測試結果分別如圖17、圖18和表5所示。
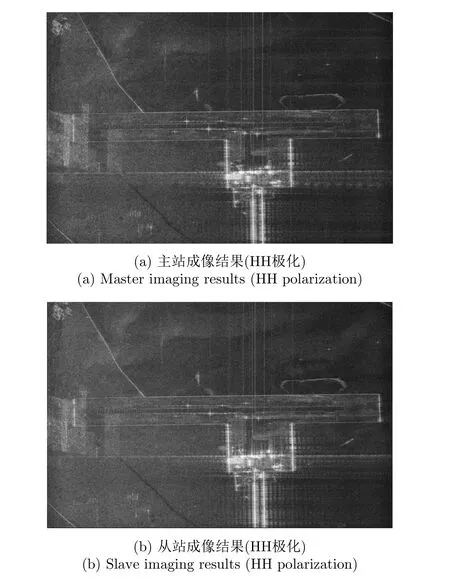
圖17 成像結果圖Fig.17 Results of imaging
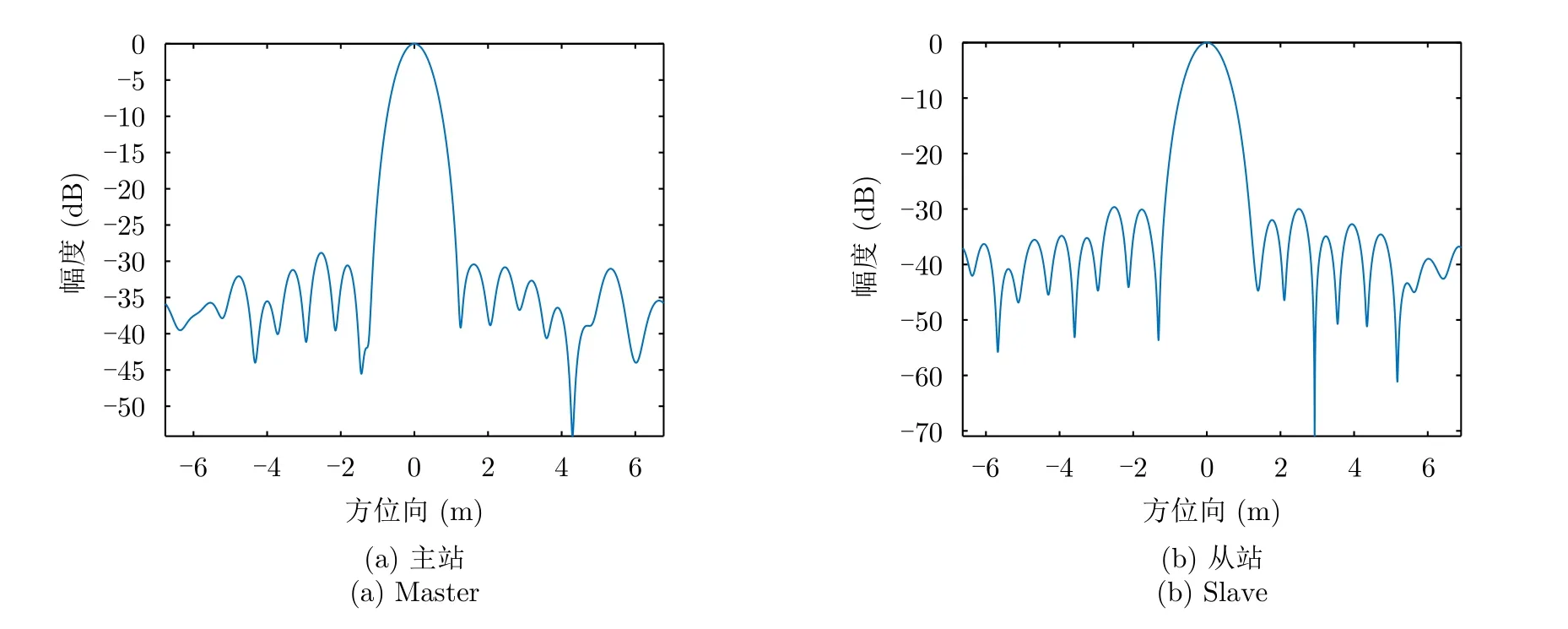
圖18 某三面角成像結果的方位向曲線Fig.18 Curve of trihedral corner reflector in azimuth in imaging results
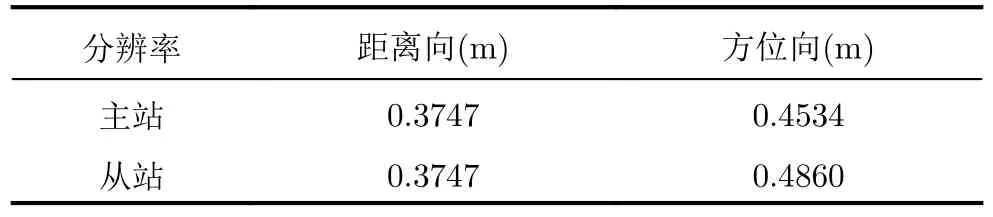
表5 分辨率測試結果Tab.5 Results of resolution test
可見主從站圖像都得到了良好的聚焦。但是,本次L波段SAR回波中存在點頻和窄帶干擾。此外,場景中機場建筑和其他地物散射強度差異懸殊,為了顧及地面角反射器和地面其他地物具有較好的信噪比,在系統增益設置時進行了折中,機場建筑強散射回波具有一定的飽和。這些因素導致成像后存在較長的距離向旁瓣拖尾現象,導致這些區域相干性較差,從而對其周邊地物的干涉處理造成了一定的影響,但因其作用范圍有限,不會對整體數據和結果的有效性造成影響。
4.2 定標處理結果
(1) 干涉定標
首先進行干涉定標處理[30-32],選擇J1-J8共8個三面角反射器,標定干涉定標基線長度和基線角度分別為30.4764 m和-1.2729°。然后對干涉相位誤差進行標定,通過對數據分析,判定干涉相位誤差沿著距離向呈線性變化,畫出所有21個角反射器的干涉相位與距離向像素位置的關系,如圖19所示,可擬合得到誤差變化的線性項和常數項分別為0.045(°/距離門)和162.647°。后續基于該參數進行補償和高程反演。
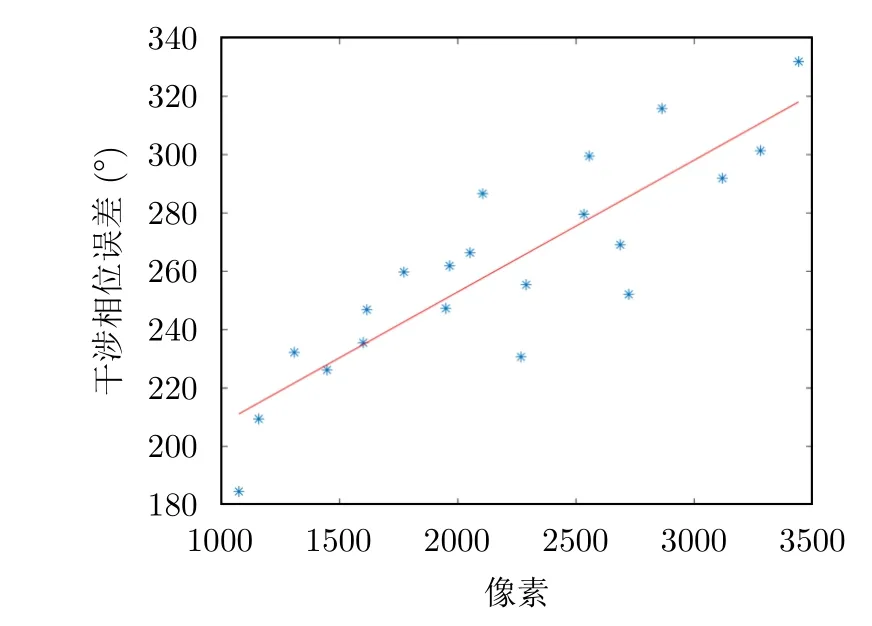
圖19 干涉相位誤差與距離向像素關系Fig.19 Relation of interference phase error and pixel location in range direction
(2) 極化定標結果
基于布設的定標器開展極化定標處理并進行極化校正[33],以主站實驗數據為例,給出Pauli偽彩合成圖如圖20所示。從偽彩圖中可見,極化校正后,圖中的裸地區域由原來的紫色變為了表征單次表面散射的藍色,機場周圍草地區域體現體散射的綠色,偽彩圖顏色表現更加合理。
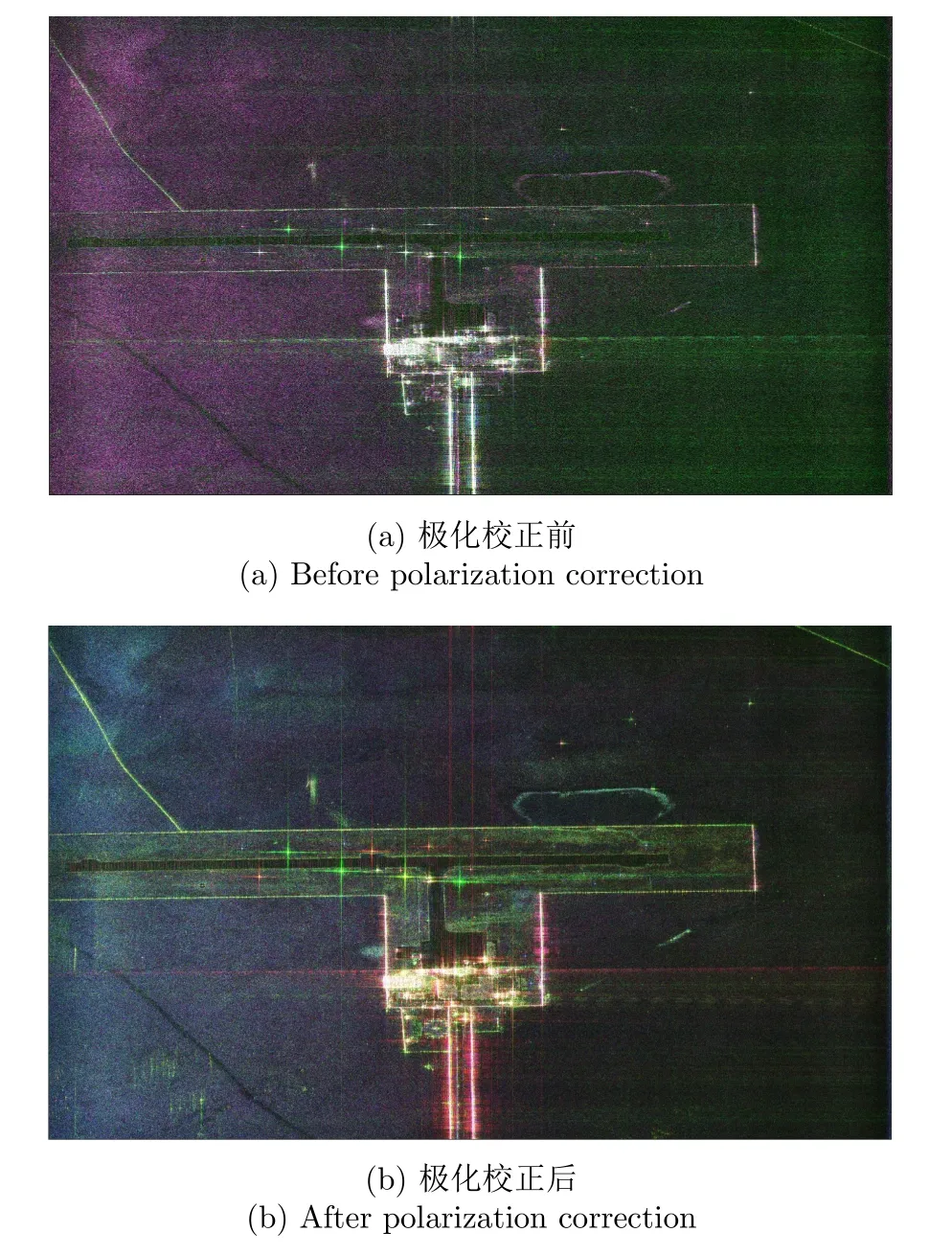
圖20 極化校正前后的主站Pauli圖Fig.20 Pauli diagrams of the master station before and after polarization correction
選擇其中受雜波影響較小的三面角,對于極化標校前后的極化指標做測評,結果如表6和表7所示。可以看出,定標所采用的三面角反射器J2*的極化隔離度和幅相不平衡達到了理想狀態,說明了標校算法的自洽性;從J3和J4兩個檢查點可見,經極化定標后,主站和從站極化隔離度均優于30 dB,極化通道幅度不平衡不超過0.5 dB,相位不平衡不超過3.5°,很好地滿足了系統的設計指標。
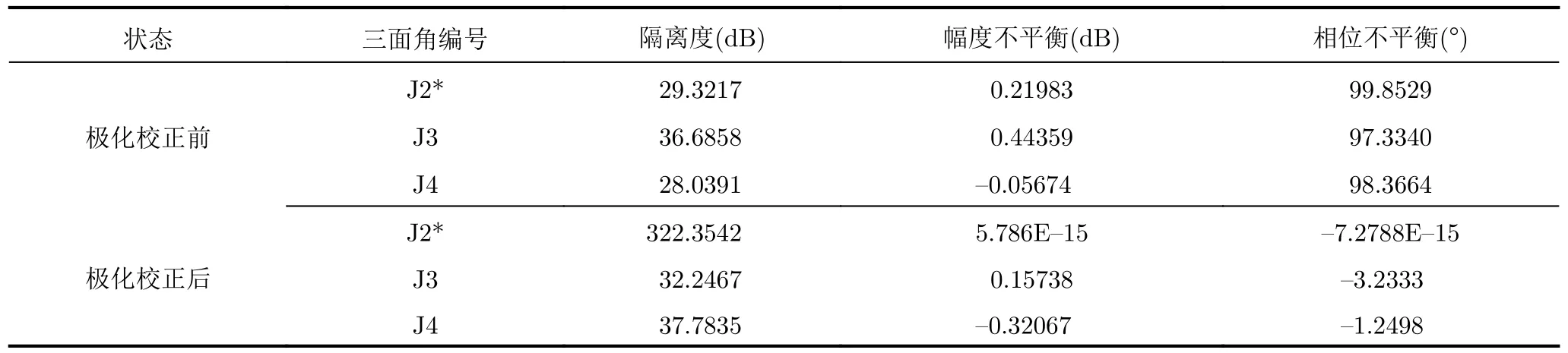
表6 主站數據極化定標前后的三面角極化質量評價Tab.6 Polarization quality evaluation of master data before and after polarization calibration based on trihedral corners
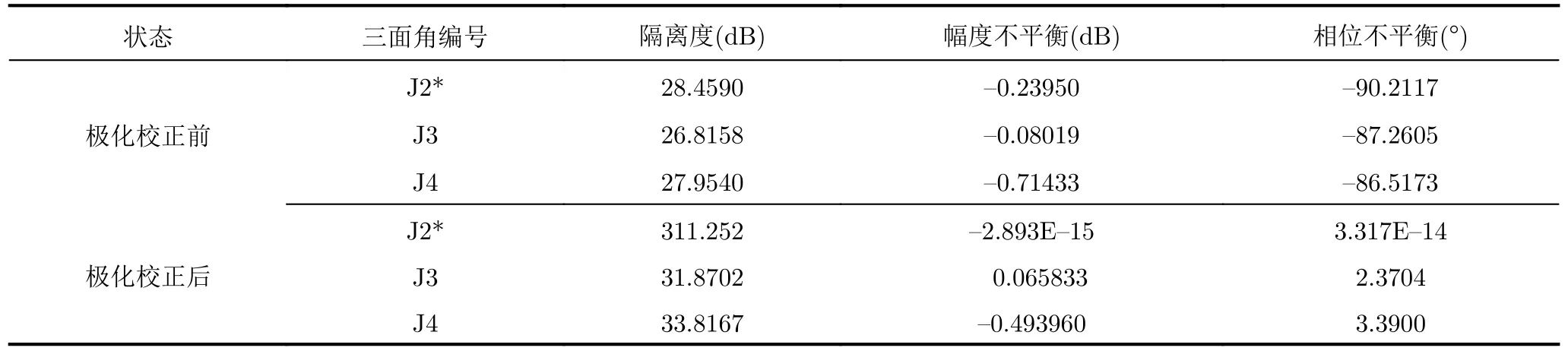
表7 從站數據極化定標前后的三面角極化質量評價Tab.7 Polarization quality evaluation of slave data before and after polarization calibration based on trihedral corners
4.3 干涉反演結果
根據上述定標結果,進行干涉處理和高程反演[34,35]。首先選取主站數據和從站數據中機場區域(圖21),進行干涉配準,配準后按照5×5窗口大小計算的相干系數圖(圖22)、干涉相位圖(圖23),去平地和濾波[36,37]后的干涉相位圖(圖24),相位解纏[38]和高程反演的結果(圖25)。其中,21個定標點的高程值和高程誤差統計結果如表8所示。經統計,全部21個定標點的高程誤差RMS為0.87 m;考慮到部分定標點所在的位置受到干擾較多,相干系數較低,其相位準確性也受到影響,因此篩選相干系數大于0.88的定標器17個,統計高程誤差RMS為0.42 m,達到系統干涉高程精度小于0.50 m的指標要求。
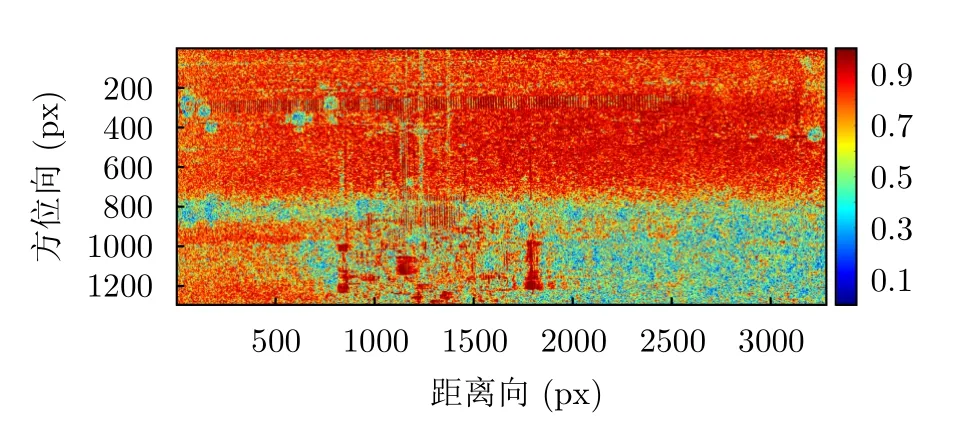
圖22 相干系數圖Fig.22 Coherence coefficient diagram
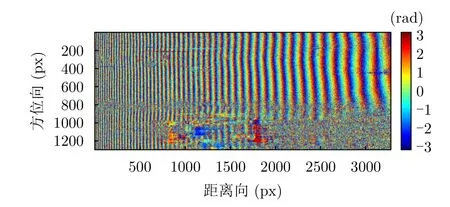
圖23 相干相位圖Fig.23 Interference phase diagram
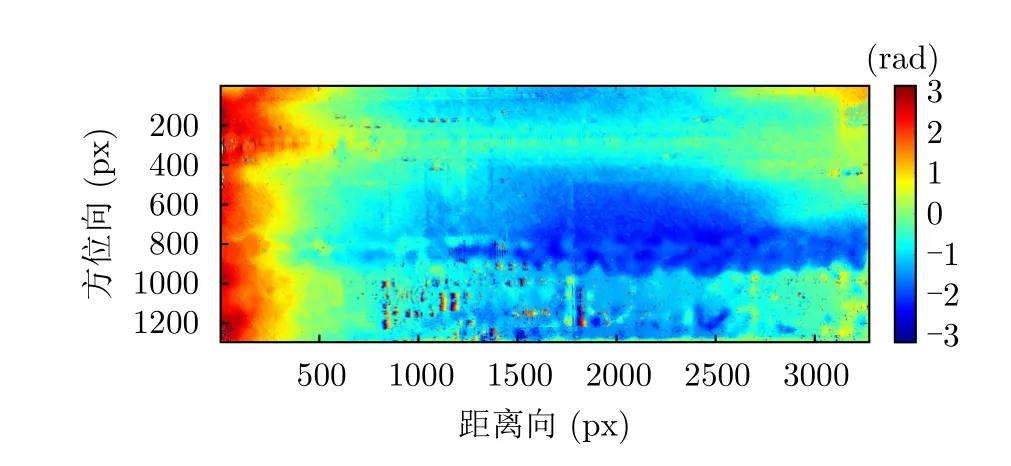
圖24 去平地和濾波后的相位圖Fig.24 Interference phase diagram after flat-earth phase removal and filtering
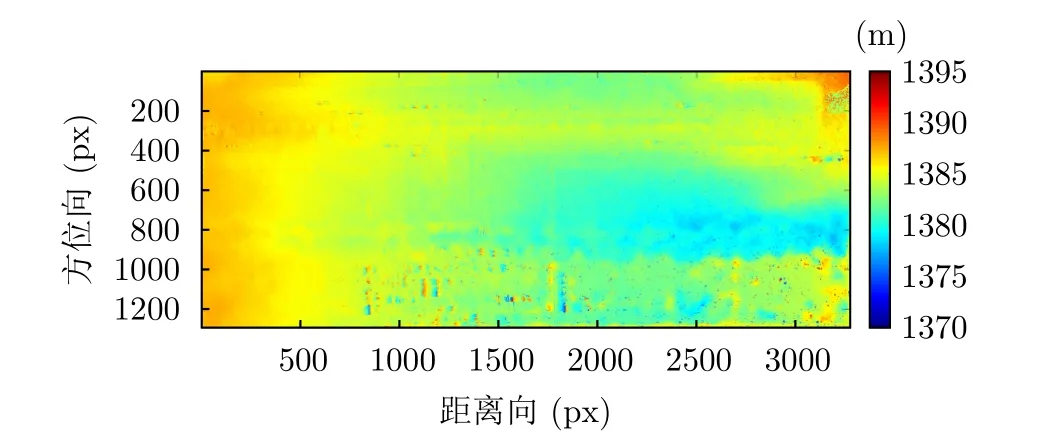
圖25 反演的高度Fig.25 Elevation inversion
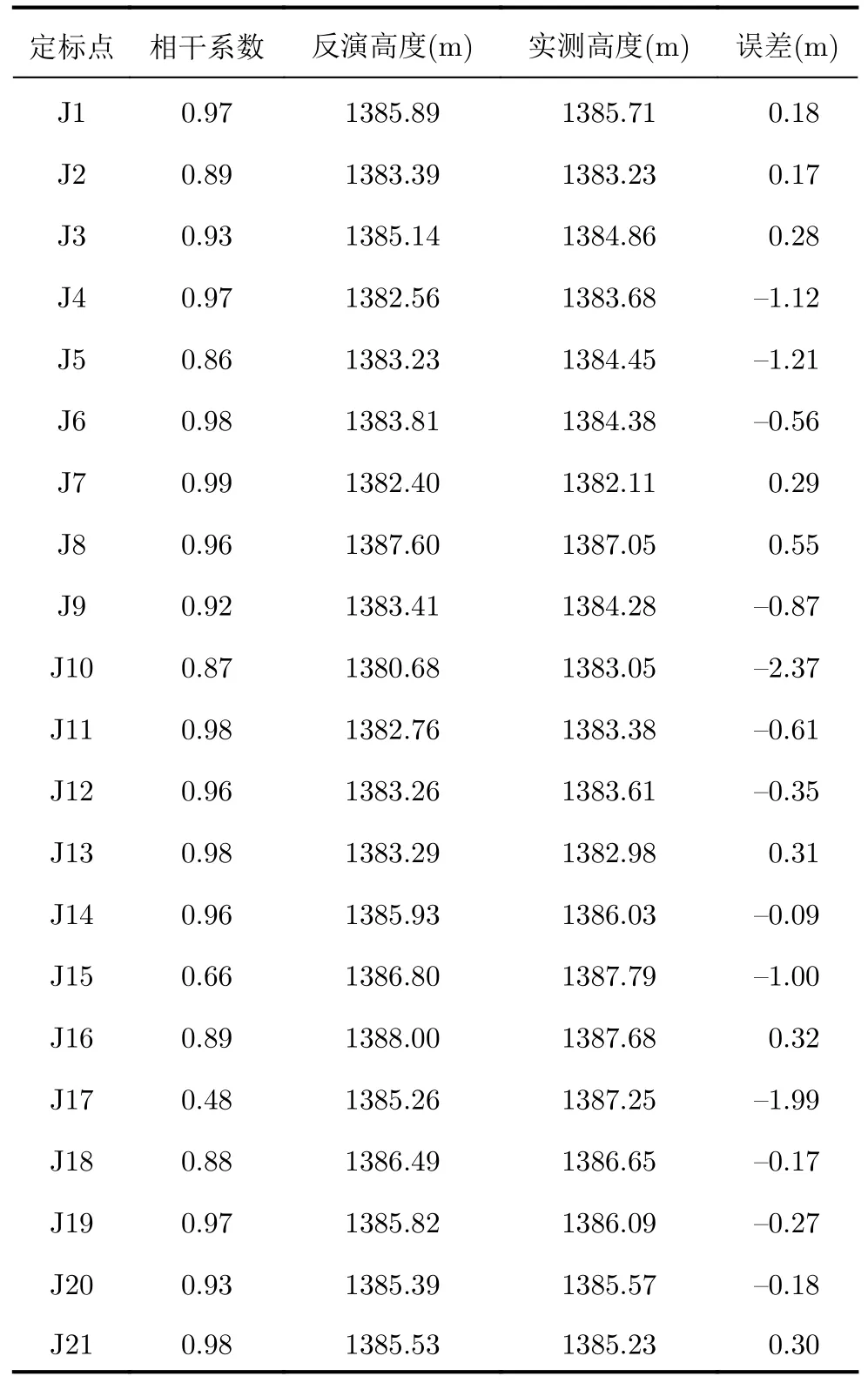
表8 雙站SAR干涉反演高度誤差表Tab.8 Table of elevation inversion error of bistatic interferometric SAR
此外,對機場附近有兩個小土丘的區域(圖26)進行處理,得到初始干涉相位、去平地并濾波后的相位如圖27和圖28所示,最終得到的高程反演結果如圖29所示,可見其很好地體現了該區域的高程變化,驗證了本無人機雙站InSAR系統在地形測量方面的有效性。
圖26 機場附近小土丘區域圖像Fig.26 Image of the hill near the airport
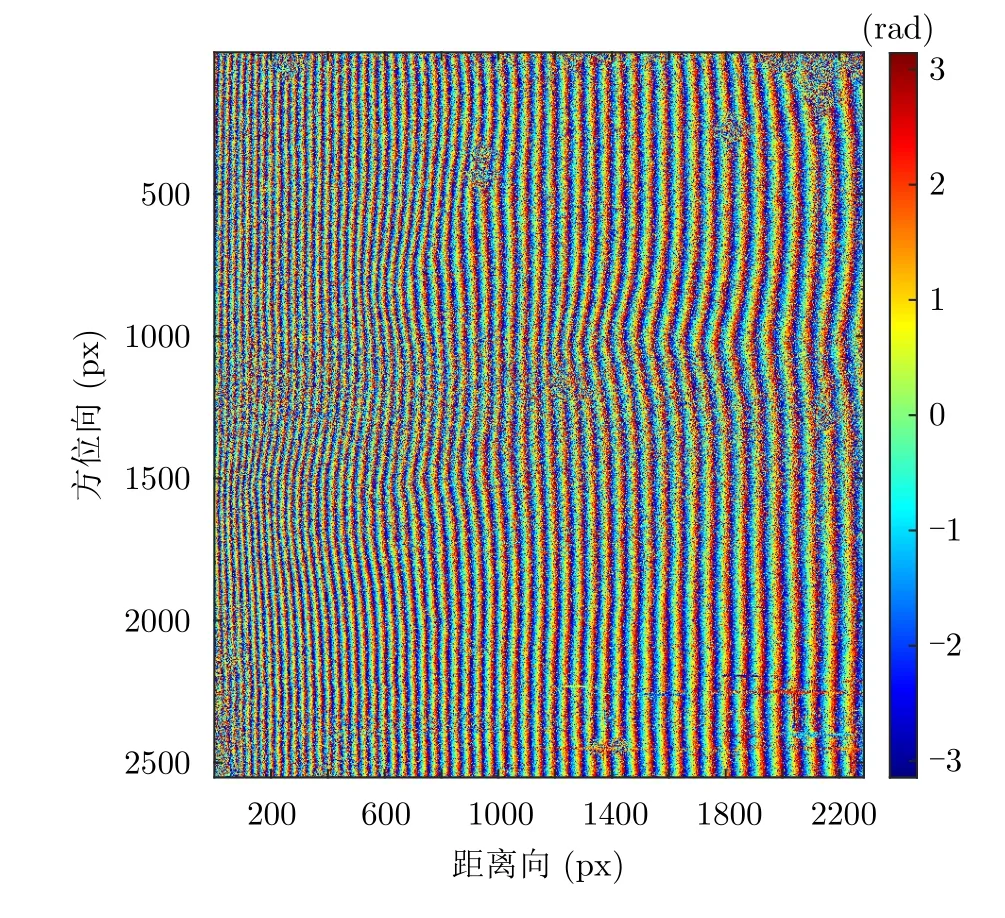
圖27 干涉相位圖Fig.27 Interference phase diagram
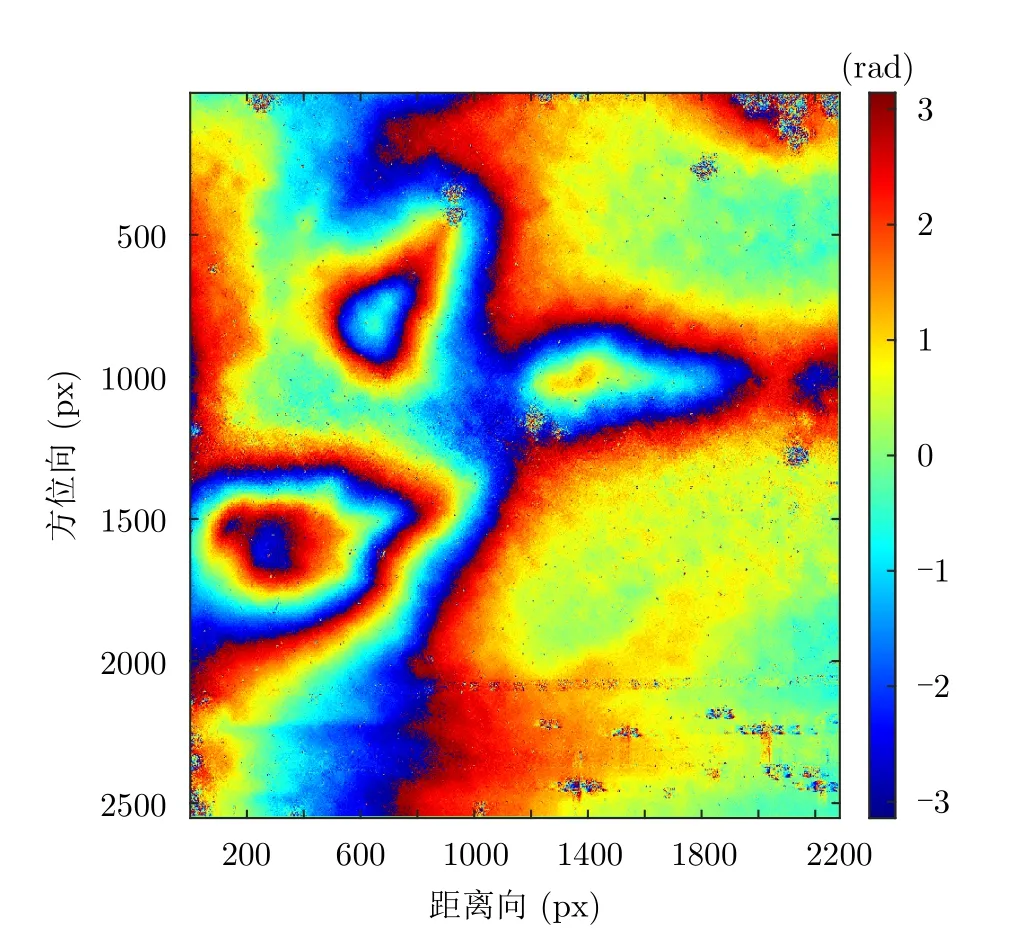
圖28 去平地及濾波后的干涉相位圖Fig.28 Interference phase diagram after flat-earth phase removal and filtering
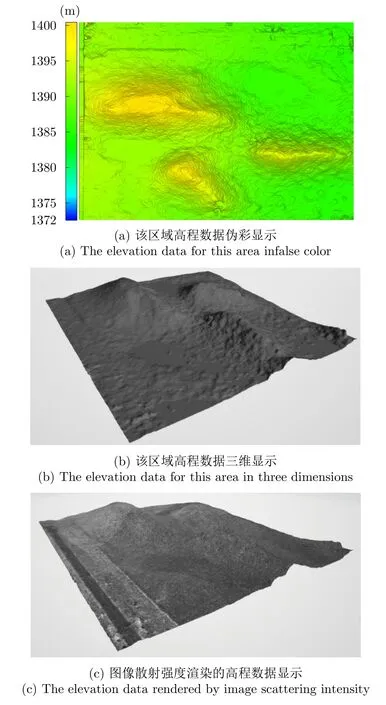
圖29 高程反演結果Fig.29 Results of elevation inversion
5 結語
本文介紹了國內首個無人機載雙站InSAR系統的組成、基本參數和關鍵技術,并給出了首次飛行試驗的實施情況和數據處理結果,驗證了該系統的基本性能和高程反演能力,為后續多航空平臺協同開展分布式干涉、分布式陣列干涉三維成像數據獲取及處理的研究提供了技術基礎。
在國家重點研發計劃等項目支撐下,項目團隊后續將進一步開展復雜地形區域的無人機載雙/分布式InSAR數據獲取和處理技術研究工作,并繼續開展試驗數據的處理和指標評估工作,推動無人機載雙/分布式InSAR的實用化。
致謝本論文成果是在國家重點研發計劃航空協同透視探測技術系統(2022YFB3902600)以及中國科學院空天信息創新研究院自主部署的顛覆性創新項目“無人機雙站L波段干涉SAR探測系統”支持下完成的,感謝研究過程中為我們提供支持的各位專家、老師。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
