基于智能機器人案例開展物聯(lián)網(wǎng)專業(yè)實踐教學(xué)的研究
2023-09-17 22:32:39劉寶靜劉欣欣邢丹崔榮梅
中國新通信 2023年13期
關(guān)鍵詞:實踐教學(xué)
劉寶靜 劉欣欣 邢丹 崔榮梅

關(guān)鍵詞:智能機器人;物聯(lián)網(wǎng)專業(yè);實踐教學(xué)
一、設(shè)計網(wǎng)球撿球智能機器人的意義
工業(yè)和信息化部、國家發(fā)展和改革委員會、科學(xué)技術(shù)部等十五部門聯(lián)合印發(fā)了《“十四五”機器人產(chǎn)業(yè)發(fā)展規(guī)劃》。該規(guī)劃提出,到 2025 年,我國將成為全球機器人技術(shù)創(chuàng)新策源地、高端制造集聚地和集成應(yīng)用新高地[1]。網(wǎng)球雖起源于法國,但在中國,隨著網(wǎng)球一姐李娜的帶領(lǐng)下,網(wǎng)球運動也迅速發(fā)展起來,越來越多的人開始投入其中。網(wǎng)球場長23.77 米、寬8.23 米。打完球后,網(wǎng)球散落一地,必須得將其撿起來,這不僅浪費時間,也降低了訓(xùn)練的樂趣。在專業(yè)的網(wǎng)球比賽中,需要六個球童負(fù)責(zé)撿球。而網(wǎng)球撿球智能機器人的設(shè)計目標(biāo)就是代替這些球童完成撿球工作。
基于網(wǎng)球撿球智能機器人案例,開展物聯(lián)網(wǎng)專業(yè)實踐教學(xué)體系的建設(shè),集科技、體育、趣味、創(chuàng)新于一身,是打造應(yīng)用型創(chuàng)新本科教育的重要發(fā)展方向。
二、網(wǎng)球撿球機器人的設(shè)計分析
網(wǎng)球撿球智能機器人模仿球童的工作,主要完成三個任務(wù),即“發(fā)現(xiàn)網(wǎng)球”“跑到網(wǎng)球位置”“撿起網(wǎng)球”。機器人的“識別系統(tǒng)”相當(dāng)于人的“眼睛”,需要在網(wǎng)球場特定區(qū)域內(nèi)準(zhǔn)確識別出網(wǎng)球,并分析出網(wǎng)球中心點的坐標(biāo),然后把此坐標(biāo)發(fā)送給機器人的“大腦”進行下一步處理。當(dāng)機器人“大腦”收到“眼睛”發(fā)送的網(wǎng)球坐標(biāo)后,發(fā)出相關(guān)指令控制“運動系統(tǒng)”(相當(dāng)于人的“腳”)向目標(biāo)位置跑去。當(dāng)機器人“跑”到網(wǎng)球所在位置時,“大腦”發(fā)出指令控制“抓取系統(tǒng)”(相當(dāng)于人的“手”)抓住網(wǎng)球,完成一個撿球任務(wù)。
綜上所述,網(wǎng)球撿球智能機器人主要由三部分組成,即“識別系統(tǒng)”“運動系統(tǒng)”和“抓取系統(tǒng)”。這三部分由“大腦”進行信息收集和命令控制。
(一)機器人“識別系統(tǒng)”的設(shè)計思路及課程規(guī)劃
1. 主要任務(wù)
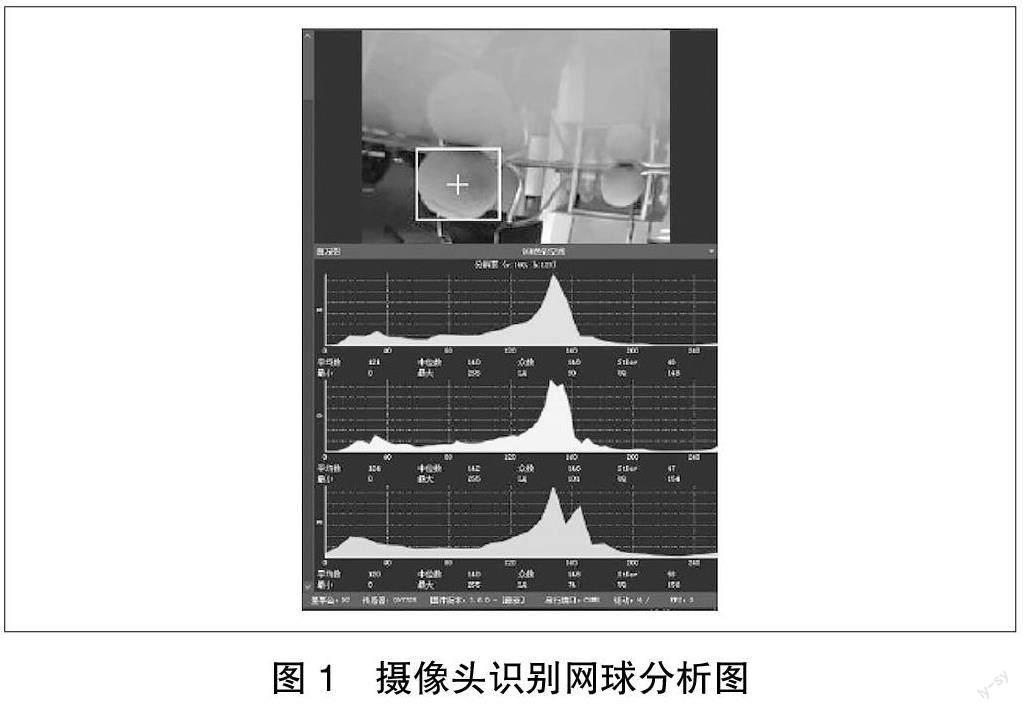
機器人的“識別系統(tǒng)”主要依賴于攝像頭技術(shù),需要完成多個任務(wù):首先,在視野中通過顏色、大小、特征值等多種方式確定網(wǎng)球目標(biāo)。如果有和網(wǎng)球顏色相近的物體存在,則通過算法來識別網(wǎng)球。如果視野中沒有發(fā)現(xiàn)網(wǎng)球,則發(fā)出指令讓機器人原地轉(zhuǎn)圈,使得攝像頭的視野發(fā)生變化后,繼續(xù)尋找網(wǎng)球。其次,當(dāng)視野中發(fā)現(xiàn)有多個網(wǎng)球時,必須通過算法確定抓網(wǎng)球的順序。最后,它能夠發(fā)出指令讓機器人向著指定方向移動。圖1顯示了通過攝像頭識別網(wǎng)球的示例。
2. 市場技術(shù)分析
目前國內(nèi)外市場上,有幾種較為成熟的主流攝像頭技術(shù),包括OpenMV、OpenCV、K210 和V831。
OpenMV 攝像頭是一款可編程單片機攝像頭,具有圖像處理功能,它的核心CPU 是STM32H743 ARMCortex M7 處理器。該攝像頭通過MicroPython 語言編程,內(nèi)置了一些圖像處理算法,使用方便,但不支持比較復(fù)雜的算法,如OCR 識別、車牌識別、貓狗分類等。
OpenCV 是一個跨平臺的計算機視覺和機器學(xué)習(xí)軟件庫,高效輕量,由一系列C 函數(shù)和少量 C++ 類構(gòu)成,同時提供了Python、Ruby、MATLAB 等語言的接口,實現(xiàn)了圖像處理和計算機視覺方面的很多通用算法[2],支持各類復(fù)雜算法,比如OCR 識別、車牌識別、貓狗分類、深度學(xué)習(xí)等,但硬件成本較高,需要基于樹莓派或Linux 平臺上進行開發(fā)。
K210 是一款具有64 位雙核、硬件FPU、卷積加速器、FFT、Sha256 的RISC-V CPU 處理器。其成本相對較低,支持部分復(fù)雜算法,比如OCR 識別、車牌識別、深度學(xué)習(xí)等,但基礎(chǔ)庫不如OpenMV 豐富。
V831 是基于linux CPython 實現(xiàn)跨平臺統(tǒng)一的簡化Linux 嵌入式設(shè)備。它支持復(fù)雜算法,成本比OpenCV更低,但需要在Linux 環(huán)境下進行開發(fā)。
3. 在物聯(lián)網(wǎng)專業(yè)實踐教學(xué)中的課程規(guī)劃
機器人“識別系統(tǒng)”涉及到多個方面的知識和技術(shù),包括Python 語言編程、圖形圖像知識、linux 操作系統(tǒng)、人工智能算法原理等。對應(yīng)課程包括《傳感器原理及應(yīng)用》《Python 語言開發(fā)》《linux 操作系統(tǒng)》《視覺物聯(lián)網(wǎng)技術(shù)及應(yīng)用》《人工智能圖像算法》等。
機器人“識別系統(tǒng)”是一個綜合性較強的課程,需要學(xué)生具備扎實的基礎(chǔ)知識和編程實踐經(jīng)驗,并能夠?qū)⒍鄠€學(xué)科領(lǐng)域的知識相互融合,形成完整的機器人識別系統(tǒng)。
(二)網(wǎng)球撿球機器人“運動系統(tǒng)”的設(shè)計思路及課程規(guī)劃
1. 主要任務(wù)
機器人的“運動系統(tǒng)”(相當(dāng)于人的“腳”),主要由各種驅(qū)動電機技術(shù)完成。機器人收到攝像頭發(fā)來的網(wǎng)球目標(biāo)坐標(biāo)后,執(zhí)行前進、后退、停止、左轉(zhuǎn)、右轉(zhuǎn)、轉(zhuǎn)圈等動作。四輪機器人的車輪如圖2 所示。
2. 市場技術(shù)分析
控制機器人運動的電機,可以選擇多重驅(qū)動方式,如直流電機、減速電機等。機器人運動的車輪可以采用橡膠輪、履帶式、麥克納姆輪等方式。為保證車輪的平穩(wěn)運動,可以使用PID 控制技術(shù)實現(xiàn)車速的自動控制,同時也可以通過陀螺儀等角度傳感器實現(xiàn)精準(zhǔn)度的控制。
直流電機動力較小,控速精準(zhǔn)度低,但優(yōu)點是控制簡單,編程容易。如果選擇減速電機,在機器人行駛過程中,CPU 實時接收減速電機編碼器的脈沖數(shù)值,并通過此數(shù)據(jù)進行左右矯正。機器人行走距離可以用下面這個公式計算:行駛距離= 脈沖數(shù)/ 倍頻數(shù)/ 編碼器線數(shù)/減速比* 車輪周長。機器人行走速度可以通過PID 進行閉環(huán)控制矯正,PID 控制原理圖如圖3 所示。
3. 在物聯(lián)網(wǎng)專業(yè)實踐教學(xué)中的課程規(guī)劃
在機器人“運動系統(tǒng)”中,需要掌握各種驅(qū)動電機的知識和技術(shù),包括直流電機、減速電機、PID 自動控制、陀螺儀角度傳感器等方面。對應(yīng)課程主要包括《單片機原理及應(yīng)用》《微型計算機原理及應(yīng)用》《自動控制技術(shù)原理及應(yīng)用》《嵌入式網(wǎng)關(guān)及控制技術(shù)》等。
(三)機器人“抓取系統(tǒng)”的設(shè)計思路及課程規(guī)劃
1. 主要任務(wù)
網(wǎng)球撿球機器人的“手”需要有高度靈活性和足夠的扭矩和承載能力才能完成抓球工作。手臂需要實現(xiàn)肩、肘、腕和手的復(fù)雜轉(zhuǎn)動,每個關(guān)節(jié)的轉(zhuǎn)向范圍不同,機械爪需要能夠張開、抓取和釋放。該機器人的5 自由度機械臂結(jié)構(gòu)如圖4 所示,并且多個單獨關(guān)節(jié)之間需要實現(xiàn)復(fù)雜聯(lián)動。
2. 市場技術(shù)分析
機器人的機械臂及機械手的運動主要通過聯(lián)動多個舵機來控制。舵機是一種適用于需要角度不斷變化并可以保持穩(wěn)定的控制系統(tǒng)的位置(角度)伺服驅(qū)動器。舵機主要分為數(shù)字舵機和模擬舵機。它內(nèi)部有一個基準(zhǔn)電路,產(chǎn)生20ms 周期、1.5ms 寬度的基準(zhǔn)信號,并通過比較直流偏置電壓與電壓器的電壓來獲得輸出電壓差。最后,電壓差的正負(fù)輸出到電機驅(qū)動芯片決定電機的正反轉(zhuǎn)。
3. 在物聯(lián)網(wǎng)專業(yè)實踐教學(xué)中的課程規(guī)劃
在機器人“抓取系統(tǒng)”方面,主要知識包括數(shù)字舵機、模擬舵機、PID 自動控制、舵機聯(lián)動算法等,對應(yīng)課程主要包括《單片機原理及應(yīng)用》《微型計算機原理及應(yīng)用》《自動控制技術(shù)原理及應(yīng)用》《嵌入式網(wǎng)關(guān)及控制技術(shù)》等。
(四)網(wǎng)球撿球機器人“大腦-CPU”的設(shè)計思路及課程規(guī)劃
對各種信息進行處理需要CPU 來完成,智能機器人的CPU 一般采用嵌入式計算機系統(tǒng)來完成,市場主要技術(shù)包括C51、STM32、LinuxA7 等不同檔次的嵌入式系統(tǒng),對應(yīng)課程主要包括《單片機原理及應(yīng)用》《微型計算機原理及應(yīng)用》《自動控制技術(shù)原理及應(yīng)用》《嵌入式網(wǎng)關(guān)及控制技術(shù)》《嵌入式操作系統(tǒng)》等。
三、網(wǎng)球撿球機器人系統(tǒng)的設(shè)計分析及課程規(guī)劃
作為一個網(wǎng)球撿球機器人,它通過“眼睛看”“跑過去”“撿起來”等動作,完成了代替球童撿球的主要工作。但是對于球場管理者來說,他們希望能夠遠程實時了解球場的撿球數(shù)量,并能夠遠程控制機器人的開關(guān)等功能,因此,該球場系統(tǒng)需要增加網(wǎng)球的“存儲管理”“遠程控制”等功能。
(一)存儲管理功能的設(shè)計思路及課程規(guī)劃
機器人的存儲管理功能主要由物聯(lián)網(wǎng)通信技術(shù)、數(shù)據(jù)庫存儲技術(shù)、信息安全技術(shù)等多種技術(shù)共同完成。
本系統(tǒng)需要通過無線技術(shù)遠程發(fā)送給球場管理者,因此本案例數(shù)據(jù)庫存儲主要指云存儲技術(shù)。云存儲主要包括華為云、騰訊云、電信云等,分為IaaS、PaaS、SaaS 等不同方式,基礎(chǔ)設(shè)施在最下端、平臺在中間、軟件在頂端。對應(yīng)課程主要包括《TCP/IP 技術(shù)及應(yīng)用》《數(shù)據(jù)庫原理及應(yīng)用》《網(wǎng)絡(luò)信息安全》《云計算與虛擬化》等。
(二)遠程控制功能的設(shè)計思路及課程規(guī)劃
機器人的遠程控制功能主要由物聯(lián)網(wǎng)通信技術(shù)、物聯(lián)網(wǎng)應(yīng)用層設(shè)計等多種技術(shù)共同完成。
物聯(lián)網(wǎng)通信技術(shù)可以分為近距離傳輸和遠距離傳輸兩種方式。近距離傳輸方式主要有紅外、藍牙、WiFi、UWB、ZIGBEE 等,信號覆蓋范圍則一般在幾十厘米到幾百米之間;遠距離傳輸方式主要有NBIOT、MQTT、LoRa 等,信號覆蓋范圍一般在幾公里到幾十公里之間。對應(yīng)課程主要包括《TCP/IP 技術(shù)及應(yīng)用》《傳感網(wǎng)原理及應(yīng)用》《物聯(lián)網(wǎng)通信技術(shù)實訓(xùn)》等。
球場管理者的操作平臺可以是基于微信小程序的移動端,也可以是基于linuxQT 開發(fā)的嵌入式平臺。云端數(shù)據(jù)與微信小程序之間,通過HTTP 協(xié)議接口、POST方式發(fā)送操作指令、GET 方式獲取云端數(shù)據(jù)。相關(guān)課程包括《基于物聯(lián)網(wǎng)技術(shù)的微信小程序設(shè)計》等。基于LinuxQT 的嵌入式平臺,則需要學(xué)習(xí)Linux 系統(tǒng)、C++編程語言、QT 開發(fā)接口、圖形化應(yīng)用層設(shè)計等。相關(guān)課程包括《網(wǎng)絡(luò)編程技術(shù)及應(yīng)用》《嵌入式網(wǎng)關(guān)及控制技術(shù)》《嵌入式操作系統(tǒng)》等。
四、結(jié)束語
基于網(wǎng)球撿球智能機器人案例,開展物聯(lián)網(wǎng)專業(yè)實踐教學(xué)體系的建設(shè),將科技、體育、趣味和創(chuàng)新融合為一體,徹底改變了現(xiàn)有實踐項目的零散現(xiàn)象。在技術(shù)、思想和素質(zhì)上符合物聯(lián)網(wǎng)專業(yè)能力主線的發(fā)展,實現(xiàn)了多門實踐課程之間的關(guān)聯(lián)整合。這種全面的實驗教學(xué)體系培養(yǎng)了應(yīng)用型創(chuàng)新人才,迅速推動了物聯(lián)網(wǎng)工程專業(yè)的一流本科建設(shè)發(fā)展之路。
作者單位:劉寶靜 劉欣欣 邢丹 崔榮梅 河北傳媒學(xué)院
猜你喜歡
中國科技博覽(2016年19期)2016-10-19 14:32:01
中國市場(2016年35期)2016-10-19 03:11:23
中國市場(2016年35期)2016-10-19 02:58:48
科技視界(2016年21期)2016-10-17 17:25:51
考試周刊(2016年79期)2016-10-13 23:35:16
考試周刊(2016年79期)2016-10-13 23:26:02
大學(xué)教育(2016年9期)2016-10-09 08:49:28
大學(xué)教育(2016年9期)2016-10-09 08:46:17
大學(xué)教育(2016年9期)2016-10-09 08:34:10
大學(xué)教育(2016年9期)2016-10-09 08:17:37
