電子節(jié)氣門控制系統(tǒng)設(shè)計與仿真分析
2023-09-18 10:21:14俞涵青
科技創(chuàng)新與應(yīng)用 2023年26期
俞涵青
(福建船政交通職業(yè)學(xué)院,福州 350007)
電子節(jié)氣門是機械發(fā)動機的核心部件,將其與控制系統(tǒng)實現(xiàn)通信連接后,能夠?qū)崿F(xiàn)多種控制功能,從而提升機械運行性能,相較于傳統(tǒng)的機械連接方式,電子節(jié)氣門系統(tǒng)更加簡單,便于操作,而且能夠?qū)刂葡到y(tǒng)運行狀態(tài)進(jìn)行監(jiān)控,具有較好的應(yīng)用價值。
1 電子節(jié)氣門控制系統(tǒng)設(shè)計
針對電子節(jié)氣門控制系統(tǒng)的設(shè)計,控制器是核心,主要負(fù)責(zé)采集和處理輸入信號,并采用特定的算法,在微處理器的分析計算后得到最終的控制量,再將控制量傳輸至執(zhí)行器,從而完成控制任務(wù)及操作。為實現(xiàn)電子節(jié)氣門的控制功能,需要對裝置的硬件系統(tǒng)及軟件系統(tǒng)進(jìn)行設(shè)計。
1.1 電子節(jié)氣門控制器硬件設(shè)計
控制器硬件設(shè)計要求具體為:控制器采集機械拉桿位置→通過傳感器輸入信號→節(jié)氣門位置傳感器反饋信號→分析輸入信號及反饋信號→快速調(diào)節(jié)節(jié)氣門電機轉(zhuǎn)速→減速機構(gòu)將扭矩傳到節(jié)氣門轉(zhuǎn)軸→配合復(fù)位彈簧的作用→控制節(jié)氣門閥片的轉(zhuǎn)角。為了提升機械控制系統(tǒng)性能,控制器的硬件需設(shè)計4 路信號采集電路、電機控制電路、故障報警電路和電源電路,并且配合1 臺微型計算機進(jìn)行數(shù)據(jù)的計算分析,微型計算機是控制器的核心,主要進(jìn)行信號采集,并發(fā)出電機控制信號及故障報警信號。
1.1.1 信號采集電路
1)結(jié)合節(jié)氣門控制系統(tǒng)應(yīng)用要求,本文的設(shè)計中選用了BOSCH(F011200Y015)型號的電子節(jié)氣門。
2)傳感器部分應(yīng)用冗余設(shè)計,在標(biāo)定后確定為線性電位計,因此兩路信號的和是一個常數(shù)。
3)機械拉桿開關(guān)也應(yīng)用以上設(shè)計方法。
4)4 路信號均為模擬信號(電壓信號),在操作中需提升信號獲取的準(zhǔn)確度,因此對信號采集電路中的4 路信號需進(jìn)行濾波處理,采用RC 濾波電路對4 路信號進(jìn)行高頻干擾成分的過濾,再將4 路信號分別接入到Atmegal16L 上的PA0、PA1、PA2 和PA3 引腳上。
5)對濾波后的數(shù)字信號進(jìn)行整形、去耦處理。
6)安裝A/D 轉(zhuǎn)化器,將模擬信號轉(zhuǎn)換成數(shù)字信號,進(jìn)一步傳輸至微控制單元(MCU)處,進(jìn)行下一步處理[1]。
1.1.2 電機驅(qū)動電路
1)驅(qū)動電機采用L298 芯片,封裝形式設(shè)計為直插式,能夠同時驅(qū)動2 臺電機。
2)驅(qū)動電機安裝完成后進(jìn)行正反轉(zhuǎn)及調(diào)速測試,將工作電壓設(shè)置為36 V,輸出電流設(shè)置為3.5 A。
3)在驅(qū)動電機處安裝4 個單片機IO 口,為驅(qū)動指令提供信號。
4)將使能信號ENA 及ENB 接入控制使能端,從而控制電機的停止及轉(zhuǎn)動。
5)運用驅(qū)動電路中的5、7、10 和12 腳來控制電機正轉(zhuǎn)及反轉(zhuǎn),將使能信號ENA 接入Atmegal16L 的PD7 引腳上,并將IN1 及IN2 分別接入到PD4 及PD5引腳上,如圖1 所示。
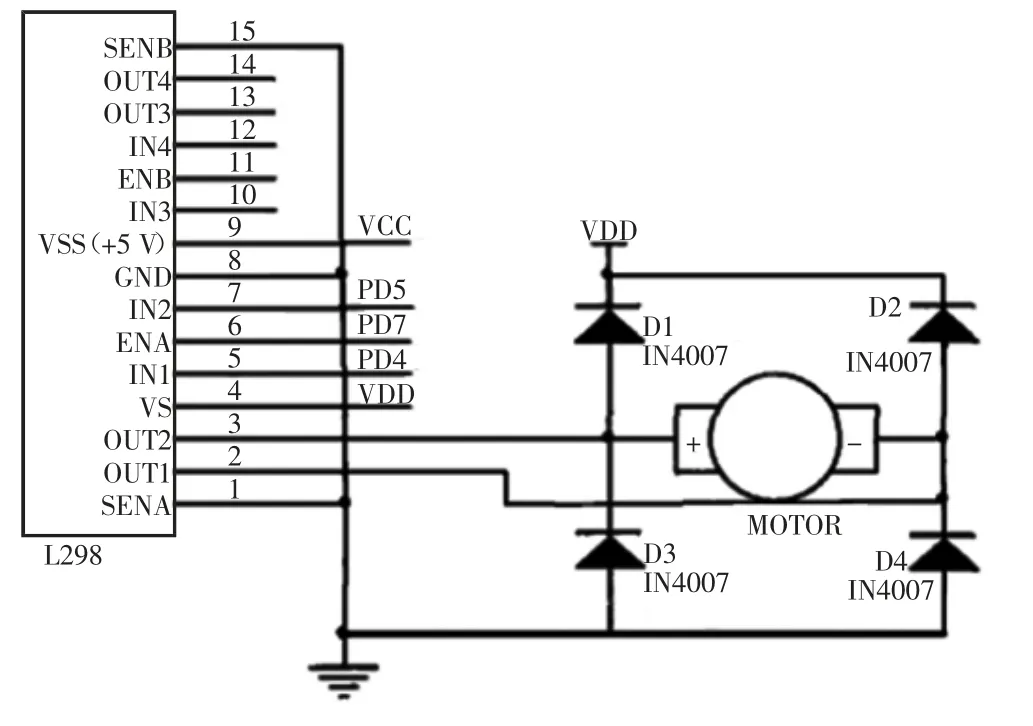
圖1 電機驅(qū)動電路圖
1.1.3 串口通信電路設(shè)計
機械控制器的控制系統(tǒng)中數(shù)據(jù)通信采用的是RS232 串口通信標(biāo)準(zhǔn),并采用MAX232 進(jìn)行上機位與下機位之間的電平轉(zhuǎn)化,這種通信協(xié)議設(shè)計安裝及操作環(huán)節(jié)簡單可靠,應(yīng)用價值較高。
1.1.4 MCU 設(shè)計
微控制單元(MCU)為控制器的核心元件,配合機械使用性能,本文選擇了8 位的AVR 單片機,型號為Atmegal16L,具有較高的性價比;模數(shù)轉(zhuǎn)換器(ADC)為8 路10 位,脈沖寬度調(diào)制(PWM)為4 通道,工作額定電壓設(shè)計為2.7~5.5 V,配合安裝2 個8 位定時計數(shù)器及1 個16 位定時計數(shù)器;硬件系統(tǒng)中一般指令執(zhí)行時間設(shè)定為1 個時鐘的周期,系統(tǒng)能夠運用ISP 進(jìn)行軟件編程及下載操作,能夠滿足數(shù)據(jù)存儲容量大、程序非易失性等要求;單片機的設(shè)計需滿足最小系統(tǒng)要求,即能夠包含復(fù)位電路、晶振電路、電源電路及A/D 轉(zhuǎn)換濾波電路[2]。
1.2 電子節(jié)氣門控制器軟件設(shè)計
本文設(shè)計的機械電子節(jié)氣門軟件控制系統(tǒng)中的AVR 單片機采用C 語言編程,并采用ICCAVR 編譯環(huán)境開發(fā)軟件。在設(shè)計中需注意提升節(jié)氣門閥片的響應(yīng)能力,要能夠根據(jù)系統(tǒng)指令進(jìn)行調(diào)節(jié),并且具備一定的外界抗干擾能力,采用控制算法及濾波算法,對閉環(huán)反饋控制及程序結(jié)構(gòu)進(jìn)行優(yōu)化,實現(xiàn)主程序與各個子程序之間的快速通信,從而分析及評估控制效果,提升軟件系統(tǒng)的操作性能。
1.2.1 系統(tǒng)主程序設(shè)計
結(jié)合硬件系統(tǒng)功能要求及電路結(jié)構(gòu)來編寫系統(tǒng)軟件程序,軟件系統(tǒng)包含主程序及應(yīng)用子程序,其中主程序包括初始化部分及循環(huán)部分,而初始化部分主要包含常量初始化、I/O 端口初始化、定時器0 和定時器2初始化、ADC 初始化、串口初始化及控制參數(shù)初始化;循環(huán)部分主要包括中斷服務(wù)子程序、PWM 子程序、故障診斷子程序、控制算法子程序、串行通信子程序及角度計算子程序。
1.2.2 系統(tǒng)子程序設(shè)計
1)PWM 子程序。該子程序是利用脈沖寬度調(diào)制來指揮電子節(jié)氣門,從而控制電機的調(diào)速,在設(shè)計時需將電機電樞上的脈沖電壓頻率設(shè)定為固定值,通過不斷調(diào)節(jié)脈沖寬度來控制電機轉(zhuǎn)速。結(jié)合Atmegal16L 型號單片機+定時器+計數(shù)器的硬件組合,需在軟件設(shè)計中對TC2 進(jìn)行參數(shù)設(shè)置,進(jìn)而得出頻率及占空比任意的PWM 波。PWM 頻率可以通過電機調(diào)速來控制,在設(shè)計過程中將頻率固定為1 kHz,在改變控制量后,可以相應(yīng)地改變占空比,因此用PWM 表示占空比。
2)數(shù)據(jù)采集子程序。結(jié)合信號采集電路結(jié)構(gòu),系統(tǒng)總共需要采集4 路模擬信號,由于Atmegal16L 單片機內(nèi)配備有8 路A/D 轉(zhuǎn)換電路,因此可在單片機PA 口處直接接入節(jié)氣門處傳感器信號(TPS)及操作桿處傳感器信號(PPS)。單片機的模數(shù)轉(zhuǎn)換器選擇單端電壓輸入方式,其轉(zhuǎn)換精度有10 位,能夠滿足機械控制需求,此環(huán)節(jié)需注意單端輸入方式能夠同時采集4 路模擬信號,因此需配置多路選擇器(ADMUX),再對各路信息進(jìn)行輪流采集;模擬信號采集完畢后通過定時器/計數(shù)器TC0 來對比配比中斷,將合適的信號源通過模數(shù)轉(zhuǎn)換器轉(zhuǎn)化為觸發(fā)源。
3)PID 控制子程序設(shè)計。該子程序在運行時,對系統(tǒng)的被控量進(jìn)行實際測量,得出數(shù)值后對比設(shè)定量,如果存在偏差,進(jìn)一步通過偏差的比例、積分、微分計算得出被控對象的控制量,其中控制器輸出與輸入關(guān)系公式為
式中:Kp表示比例系數(shù);Ti表示積分時間常數(shù);Td表示微分時間常數(shù);e(t)表示將節(jié)氣門實際開度與期望開度做差值得到的角度偏差,p、i、d 表示控制器規(guī)律選項,其中p 為比例控制規(guī)律,i 為比例積分控制規(guī)律,d為比例微分控制規(guī)律。單片機控制前需進(jìn)行采樣,通過對公式(1)的離散化處理,得出離散化PID 公式為
對公式(2)進(jìn)行增量推導(dǎo)得出增量式的PID 公式為
PID 控制子程序設(shè)計需對比例、積分、微分3 個參數(shù)進(jìn)行調(diào)節(jié)設(shè)定,3 個參數(shù)之間相互制約并影響系統(tǒng)的穩(wěn)定性,因此需要在不斷調(diào)節(jié)的過程中進(jìn)行優(yōu)化,具體參數(shù)調(diào)節(jié)方式見表1。
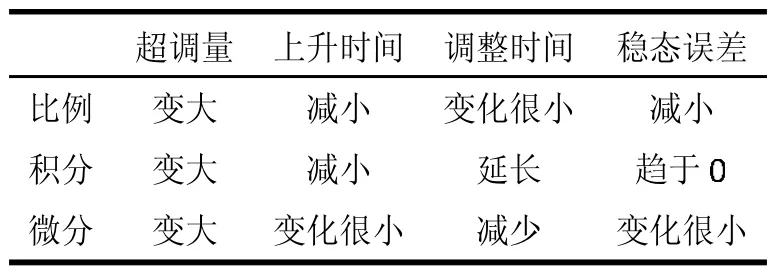
表1 PID 參數(shù)調(diào)節(jié)表
4)滑模變結(jié)構(gòu)控制子程序。該控制程序需要結(jié)合機械設(shè)備狀態(tài)方程、切換函數(shù)及指數(shù)趨近率進(jìn)行系統(tǒng)設(shè)計,采集系統(tǒng)程序中的節(jié)氣門開度參數(shù),并計算出開度偏差、節(jié)氣門角速度、拉桿角速度、開度偏差變化率、控制器加速度、摩擦力和彈簧力,在此基礎(chǔ)上求出切換函數(shù),并進(jìn)一步計算控制量,得出控制電壓,如符合設(shè)定參數(shù),則滑模變結(jié)構(gòu)控制子程序設(shè)計合理。
5)傳感器故障診斷子程序。傳感器采用電位計式冗余設(shè)計模式,其中2 個節(jié)氣門處的傳感器輸出電壓之和為常數(shù)5 V,2 個機械開關(guān)控制桿處的傳感器輸出電壓比值為常數(shù)2,由此可知傳感器輸出電壓不為0,而且供電電壓為5 V,2 處傳感器實現(xiàn)了互相監(jiān)測的目的,能夠進(jìn)行傳感器故障診斷,提高軟件系統(tǒng)運行的可靠性[3]。
2 電子節(jié)氣門控制系統(tǒng)的仿真分析
2.1 仿真試驗設(shè)計
本設(shè)計的仿真試驗環(huán)節(jié)采用Matlab/Simulink 進(jìn)行電子節(jié)氣門控制系統(tǒng)建模,先建立ETC(電控系統(tǒng))總體仿真模型,對其響應(yīng)速度及控制精度進(jìn)行測定,并結(jié)合機械設(shè)備運行情況設(shè)計出動態(tài)特性指標(biāo)如下。
2.1.1 最大超調(diào)量
當(dāng)節(jié)氣門開度在96%時,動態(tài)曲線最大值處的減穩(wěn)態(tài)值存在的誤差要小于6%。
2.1.2 上升時間對動態(tài)曲線的初始值到穩(wěn)態(tài)值進(jìn)行計時,占90%比例的運行時間要在100 ms 以內(nèi)。
2.1.3 調(diào)整時間
整個運行過程中動態(tài)曲線的誤差需控制在300 ms以內(nèi)。
2.1.4 穩(wěn)態(tài)誤差
當(dāng)動態(tài)曲線達(dá)到穩(wěn)定狀態(tài)后,進(jìn)行計算,應(yīng)用(實際轉(zhuǎn)角-目標(biāo)轉(zhuǎn)角/期望開度值)公式得出最終百分比值,需控制在2%以內(nèi)[4]。
設(shè)定好動態(tài)性能指標(biāo)后,通過仿真系統(tǒng)進(jìn)行電子節(jié)氣門基礎(chǔ)數(shù)據(jù)測試,主要包括以下幾個方面:占空比(PWM)與節(jié)氣門處的傳感器輸出電壓、控制電機的平均電流、控制電機平均電壓U 的關(guān)系曲線和根據(jù)TPS及PPS 處信號繪制出階躍響應(yīng)曲線,從而判斷電子節(jié)氣門控制系統(tǒng)的設(shè)計性能。
仿真測試開始前需要搭建試驗裝置,其中電位器給機械操作桿傳輸信號,單片機對電路采集電位器及節(jié)氣門處傳感器信號進(jìn)行采集,應(yīng)用控制算法對采集數(shù)據(jù)進(jìn)行計算,得出控制量,通過電機驅(qū)動電路,帶動電機運轉(zhuǎn),再帶動節(jié)氣門閥片轉(zhuǎn)動,直至符合設(shè)定的開度,再同步至操作桿轉(zhuǎn)角;單片機電路同時采集電位器及節(jié)氣門處傳感器信號,傳輸至串口通信電路后,最終達(dá)到PC 機,獲取給定信號及跟蹤信號后,處理分析數(shù)據(jù),進(jìn)行參數(shù)調(diào)節(jié)控制[5]。
2.2 仿真試驗結(jié)果分析
通過Matlab/Simulink 處理數(shù)據(jù)并繪制關(guān)系特征曲線及響應(yīng)曲線,分別包括了占空比與節(jié)氣門處傳感器輸出電壓、與控制電機驅(qū)動電壓、與控制電機驅(qū)動電流的關(guān)系曲線,以及階躍響應(yīng)曲線,如圖2—圖5 所示。
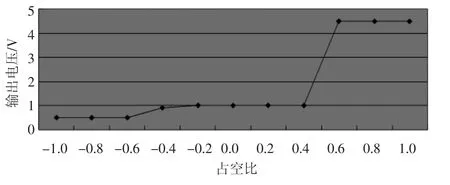
圖2 占空比與節(jié)氣門處傳感器輸出電壓關(guān)系曲線圖
結(jié)合圖2 分析可知,占空比與節(jié)氣門開度之間關(guān)系曲線變化不存在線性關(guān)系,輸出占空比在-40%~40%之間時,其輸出電壓維持在0.94 V,此時閥片角度在10°左右,當(dāng)占空比達(dá)到40%以上時,閥片逐漸開啟,當(dāng)數(shù)值達(dá)到70%時,輸出電壓接近最大額定值,為4.48 V,此時閥片開啟達(dá)到85°轉(zhuǎn)角,占空比在-100%~-60%之間時,表示節(jié)氣門完全關(guān)閉。
分析圖3,控制電機驅(qū)動電壓輸出與占空比呈正相關(guān)性,但是在原點處,增加占空比后電壓發(fā)生突變,這與OCR2 初始值設(shè)定有關(guān),因此占空比為0,驅(qū)動電壓并不為0,但是不會影響控制系統(tǒng)驅(qū)動性能。
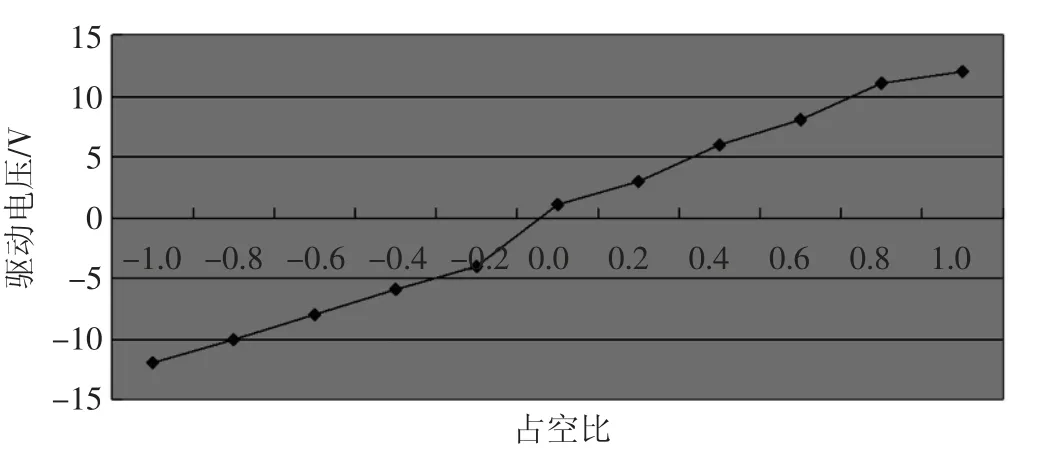
圖3 占空比與控制電機驅(qū)動電壓關(guān)系曲線圖
結(jié)合圖4 可知,占空比與控制電機驅(qū)動電流不存在線性關(guān)系,當(dāng)占空比最大時,驅(qū)動電流達(dá)到2.9 A,這是由于驅(qū)動芯片滿負(fù)荷工作導(dǎo)致電流產(chǎn)生較大變化,因此需在機械運行過程中做好散熱措施。
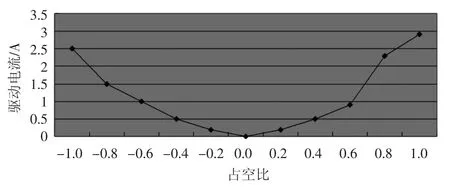
圖4 占空比與控制電機驅(qū)動電流關(guān)系曲線圖
圖5 是通過PID 控制算法得出的階躍響應(yīng)曲線,當(dāng)轉(zhuǎn)角超調(diào)量在8%左右時,穩(wěn)態(tài)誤差為1.4%,上升時間用時90 ms,調(diào)整時間用時200 ms,符合最初設(shè)定的動態(tài)性能指標(biāo),因此控制系統(tǒng)設(shè)計性能良好,可以投入使用。
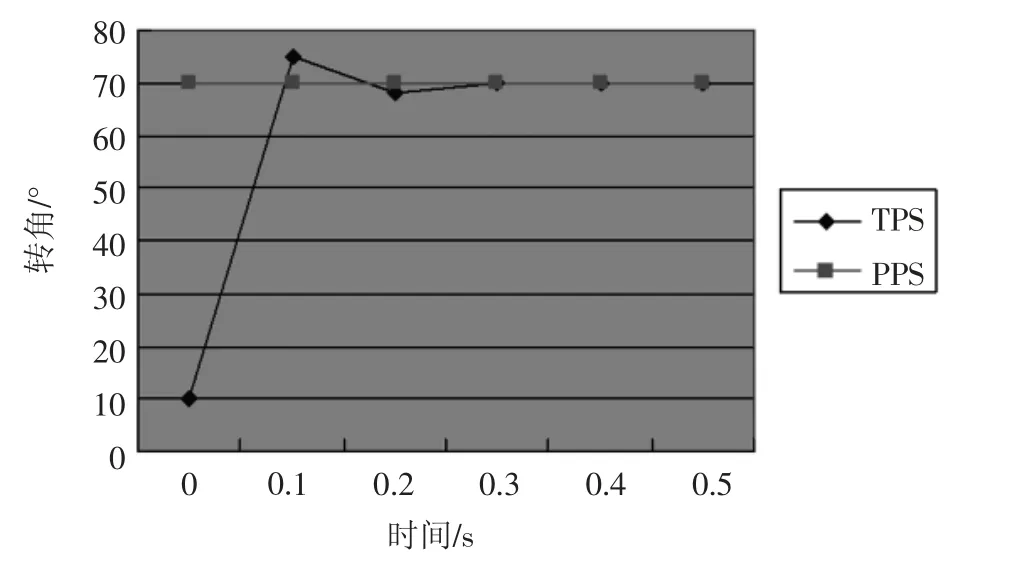
圖5 階躍響應(yīng)曲線圖
3 結(jié)論
文章通過對電子節(jié)氣門控制系統(tǒng)的硬件及軟件結(jié)構(gòu)進(jìn)行分析,在此基礎(chǔ)上搭建起仿真試驗裝置,取得系統(tǒng)測試結(jié)果后繪制相應(yīng)的曲線關(guān)系圖,再對數(shù)據(jù)及曲線關(guān)系進(jìn)行分析后可知,本文設(shè)計的電控系統(tǒng)能夠滿足機械系統(tǒng)運行要求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25