基于多傳感器的無人機自主導地線巡視方法
2023-09-19 13:34:24錢金偉陳國輝
電子設計工程 2023年18期
錢金偉,范 楊,陳國輝,辛 巍,張 燦
(國網湖北省電力有限公司檢修公司,湖北武漢 430000)
在輸電網絡中,導地線是導線組織與地線組織的統稱,對無人機飛行器設備而言,導地線負責將剩余供應電量轉移至地下環境之中。在實際應用過程中,由于配電參數、電量敏感度、電壓數值、電流數值等指標參量取值結果不同,導地線組織對傳輸電量的轉存能力會有所不同[1]。一般來說,隨著無人機作業任務的進行,供應電信號的累積量也會增多,此時導線組織傳輸電量的轉移能力,將決定無人機設備實際飛行效果。出于安全性考慮,導地線還應具備一定電信號承載能力,在傳輸電量不能快速轉存的情況下,導線裝置能夠暫時抵御電信號的攻擊行為,使無人機設備在短時間內還能繼續維持原有飛行狀態[2]。
傳感器是具有電量感知能力的電路連接元件,其存在位置不受電壓強度、電流強度等外界干擾條件的影響。近年來,多傳感器協同作用工作模式成為電力系統的主要發展方向,特別是對無人機供電體系來說,多傳感器模式更能夠實現傳輸電量信號的準確檢測[3]。為促進無人機實際飛行能力,傳統IMU 冗余補償算法借助單一傳感器元件記錄無人機設備的實際行進狀態,再借助導航主機對所記錄信息深度分析[4]。然而,該方法并不能充分發揮無人機導地線的點電荷傳輸能力,易導致剩余供應電量轉移行為受到威脅。為解決上述問題,提出一種基于多傳感器的無人機自主導地線巡視方法。
1 量測數據預處理
無人機量測數據預處理包含多傳感器配準原則構建、無人機電量供應數據獲取、電信號檢測三個執行環節。
1.1 多傳感器配準原則構建
多傳感器配準原則能夠直接面對無人機導地線組織中的電量傳輸誤差信息,并對其進行針對性處理,不但能夠控制剩余供應電量信號對常規傳輸信號的影響強度,還可將電流、電壓等電量指標的數值水平控制在既定區間之內,從根本上發揮無人機導地線的點電荷傳輸能力[5-6]。
設r0表示無人機剩余供應電量信號的初始傳輸位置,rn表示終止傳輸位置,n表示電量信號傳輸行為項指標,表示巡視傳感器元件中的感應電流均值,表示感應電壓均值,P表示巡視傳感器元件的額定功率。聯立上述物理量,將多傳感器配準原則定義為:
1.2 無人機電量供應數據獲取
無人機電量供應數據獲取是實施自主導地線巡視算法關鍵執行環節,在多傳感器配準原則支持下,規劃供應電量轉移指令的,限制對應節點處電量指標參量的數值變化趨勢[7-8]。在不考慮其他干擾條件的情況下,無人機電量供應數據獲取能力受導地線內電荷轉移量、傳感器電信號強度兩項指標參量直接影響。導地線內電荷轉移量可表示為O,在實際運算過程中,該項物理量可繼續細分為轉移量均值、特定轉移量指標O1、O2,若參考多傳感器配準原則影響能力,則的不等式條件恒成立。
傳感器電信號強度表示為β,該項指標參量取值越大,傳感器設備獲取的無人機電量供應數據也就越多。在上述物理量支持下,聯立式(1),可將無人機電量供應數據獲取表達式定義為:
式中,q1、q2表示兩個不同的電量信號供應系數。在已知無人機電量供應數據獲取結果前提下,多級傳感器設備元件可自主控制導地線內的剩余供應電量信息。
1.3 電信號檢測
電信號檢測是對無人機自主導地線內的剩余供應電量檢測,能夠決定多傳感器巡檢技術模型實用性價值,感應主機能獲取的無人機電量供應數據越多,最終所得電信號檢測結果越符合實際應用需求[9-10]。
設?max表示剩余供應電量檢測特征的最大取值,在傳感器檢測權限等于c的情況下,?max>1 不等式條件恒成立。ω表示無人機自主導線信號在傳輸過程中迭代次數,若考慮多傳感器配準原則作用能力,則可認為指標ω的取值結果始終與無人機電量供應數據獲取表達式相關。在上述物理量支持下,聯立式(2),可將電信號檢測結果表示為:
其中,β表示與剩余供應電量信號相關巡視檢測系數,δ表示特定電量處理系數。傳感器元件根據電信號檢測結果,確定無人機自主導地線內電量傳輸情況,按照實時配準原則,完成電信號參量傳輸能力判別。
2 無人機自主導地線巡視算法
2.1 作業域環境劃分
在執行無人機自主導地線巡視指令前,劃分作業域環境,盡可能多地將傳感器節點安置在同一物理區間內[11-12]。
規定d0表示無人機自主導地線巡視作業域的核心節點,其物理坐標可表示為(x0,y0),dn表示一個隨機選取的作業域節點,其物理坐標可表示為(xn,yn),n表示作業域規劃系數的最大取值結果。利用上述兩個物理坐標,可將點d0與點dn之間的距離表達式定義為:
設μ表示無人機自主導地線內的電量巡視指標,f表示電信號巡視感應特征值,lμ表示巡視指標為μ時的電信號定標量。聯立上述物理量,將無人機自主導地線巡視算法的作業域環境劃分表達式定義為:
為使各級傳感器設備能夠準確感知電量信號的傳輸行為,無人機自主導地線巡視技術只能在作業域環境中進行。
2.2 巡視節點定義
在作業域環境中,各級傳感器設備所處連接位置不完全固定,為使無人機自主導地線內的剩余供應電量能夠得到安全轉移,必須按照既定原則對各類巡視節點進行定義[13]。假設原節點所處位置不改變,最末端節點到原節點間的巡視距離也不會發生改變,則可認為待轉移的剩余供應電量越多,傳感器元件內所累積的巡視信號量越大。
設λ表示基于多傳感器配準原則的設備元件連接系數,m表示傳感器元件內的電量信號轉移權限指標,jmax表示最末端節點處的電量信號標度指征,jmin表示原節點處的電量信號標度指征。在上述物理量的支持下,聯立式(5),可將巡視節點定義條件表示為:
對各級傳感器設備元件而言,只有在已知巡視節點定義的條件下,才能實現無人機自主導地線內剩余供應電量信號安全轉移[14]。
2.3 電信號敏感性分析
電信號敏感性分析是無人機自主導地線巡視算法搭建的末尾設計環節,在已知巡視節點定義條件的情況下,若將電信號敏感性能力作為恒定變量條件,則可認為導地線組織對于電量信號的容納能力越強,最終所得巡視指令的實用性能力也就越強[15-16]。設kˉ表示單位時間內的供應電量信號轉移均值,b1、b2表示兩個不同的電量信號容納指標,且在多傳感器配準原則的作用下,b1≠b2的不等式條件恒成立。在上述物理量的支持下,聯立式(6),可將電信號敏感性分析結果表示為:
至此,實現對各項指標參量的計算與處理,在各級傳感器設備元件的支持下,完成基于多傳感器的無人機自主導地線巡視技術研究。
3 實例分析
為突出基于多傳感器的無人機自主導地線巡視算法、傳統IMU 冗余補償算法的實用差異性,設計如下對比實驗。具體實驗流程如下:
步驟一:選取圖1(a)中的無人機設備作為實驗對象。在其進入穩定飛行狀態后,對導地線內的電信號傳輸行為進行調試,如圖1(b)所示。

圖1 實驗環境
步驟二:利用基于多傳感器的巡視算法對圖2中的定量感應裝置進行控制,將所獲數據作為實驗組變量。

圖2 剩余供應電量信號檢測
步驟三:利用傳統IMU 冗余補償算法對圖2 中定量感應裝置進行控制,將所獲數據作為對照組變量;
步驟四:對比實驗組、對照組變量數據。
無人機導地線設備對于點電荷的傳輸能力可以反映出所采用巡視方法的實用性價值。一般來說,無人機導地線設備對于點電荷的傳輸能力越強,剩余供應電量被安全轉移至地下環境所需的消耗時間也就越短,此時,所采用巡視方法所具有的實用性價值也就越高;反之,若無人機導地線設備對于點電荷的傳輸能力較弱,剩余供應電量被安全轉移至地下環境所需的消耗時間也就越長,此時,所采用巡視方法所具有的實用性價值也就相對較低。
表1 記錄了實驗組、對照組無人機導地線設備對于點電荷傳輸能力的數值對比情況。
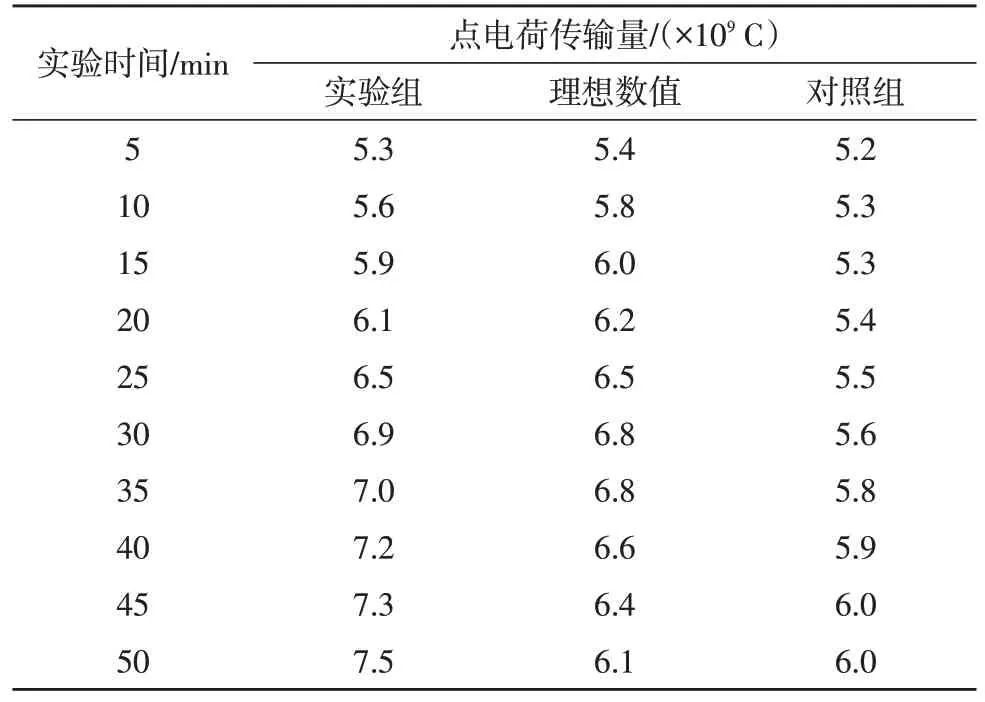
表1 點電荷傳輸能力
分析表1 可知,在理想情況下,點電荷的傳輸量保持先增大、再穩定、最后減小的數值變化趨勢,整個實驗過程中,其最大數值達到了6.8×109C,且該數值水平能夠保持5 min 的穩定存在狀態。
實驗組點電荷的傳輸量在整個實驗過程中始終保持不斷增大的數值變化狀態,其最大值7.5×109C與理想最大值6.8×109C 相比,上升了0.7×109C。
對照組點電荷的傳輸量則保持先上升、再穩定的數值變化狀態,整個實驗過程中,其最大數值僅能達到6.0×109C 與理想最大值6.8×109C 相比,下降了0.8×109C,遠低于實驗組極值水平。
綜合上述研究結果可得出實驗結論如下:
1)隨著基于多傳感器巡視技術模型的應用,無人機導地線設備對于點電荷的傳輸能力得到了一定程度的促進;
2)基于多傳感器巡視技術模型能夠將剩余供應電量安全且快速地轉移至地下環境之中,與傳統IMU 冗余補償算法相比,這種新型巡視方法具備較強的實際可行性。
4 結束語
新型無人機自主導地線巡視模型以多傳感器配準原則為基礎,對已獲取的無人機電量供應數據進行按需處理,又根據電信號的實時檢測結果,將整個作業域環境劃分成多個標準參考區間,不但能夠精準定義各級巡檢節點,也可以得到符合應用需求的電信號敏感性分析結果。從實用性角度來看,在這種新型巡視模型的作用下,無人機導地線設備在單位時間內所傳輸的點電荷數量水平明顯增大,能夠在較短時間內將剩余供應電量安全轉移至地下環境中,與傳統IMU冗余補償算法相比,具有更強的可行性價值。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
