肝腫瘤熱消融穿刺電磁導航系統研究
2023-09-19 00:39:30姚潔伍國林吳水才
中國醫療設備 2023年9期
姚潔,伍國林,吳水才
北京工業大學 環境與生命學部 生物醫學工程系 智能化生理測量與臨床轉化北京市國際科研合作基地,北京 100124
引言
原發性肝癌是全球第六大常見的癌癥,我國肝癌新發病例占全球的45.3%,是我國第5 位常見惡性腫瘤及第2 位腫瘤致死病因[1-3]。目前肝腫瘤手術切除、肝移植和消融治療已成為原發性肝癌的3 種主要治療方法[4-7]。肝腫瘤微波和射頻消融治療由于其操作簡單、微創、療效顯著等優點,已逐步成為治療原發性肝癌的有效方法[8]。在術前,醫生依據CT、MRI 等斷層影像圖像構建的三維可視化模型,對患者肝腫瘤消融穿刺路徑進行規劃;術中,在影像技術引導下,醫生憑經驗確定經皮穿刺點的位置與深度。在實際消融治療中,醫生往往很難做到穿刺與消融治療一步到位[9-10]。大量研究表明,消融針穿刺導航系統可在術中為醫生提供輔助與指導,提高肝腫瘤熱消融治療穿刺成功率[11-13]。基于此,本文旨在研制一種肝腫瘤熱消融穿刺電磁導航系統,用于輔助醫生進行肝腫瘤經皮穿刺,提高手術的安全性與有效性。
1 方法
1.1 術中定位技術
在肝腫瘤穿刺中,穿刺位置選取與深度的不恰當可能導致不完全消融和較高的復發率,精準的術中定位對于達到足夠的腫瘤消融覆蓋和治療至關重要。手術導航系統術中定位一般有機械定位、超聲定位、光學定位與電磁定位[11-14]。電磁定位不易受障礙物遮擋和反光物干擾,可以對非剛性手術器械進行準確定位,且分辨率較高[15-16]。在肝腫瘤熱消融穿刺電磁導航系統設計中,選取加拿大NDI 公司生產的Aurora 電磁定位儀來追蹤患者與手術器械的物理坐標空間位姿,以提高手術導航的精度。
1.2 空間配準技術
空間配準是為了在不同坐標系之間尋求其轉換關系。肝腫瘤熱消融導航系統中,三維影像模型、定位設備以及患者均有各自獨立的坐標系,通過確定圖像系統和定位導航系統之間的轉換關系,將消融針按照圖像系統顯示的術前規劃穿刺路徑插入病灶靶點,并在這個過程中實時跟蹤消融針位置和姿態。
手術導航中的空間配準技術主要有標記點法、標志面法、定位框架法等,標記點法是目前臨床中最常用的配準方法[17]。標記點配準法是利用不同坐標系下一定數目的公共點作為配準標記點,尋求不同坐標系下變換誤差最小的旋轉矩陣和平移矢量。標記點類型主要包括解剖標記點和粘貼于皮膚表面的自定義標記點兩種。解剖標記點利用人體的顯著特征作為標記點,如鼻根、眼角、下頜角點等[18]。人工粘貼標記點由醫生在術前粘貼于患者體表,由成像設備掃描成像后表現出與其周圍組織灰度值的明顯差異,方便識別、提取圖像中的標記點位置信息。
基于不同坐標系下成對點集的剛性空間配準算法,目前常用的主要是奇異值分解(Singular Value Decomposition,SVD)法、最近值迭代法、單位四元數法和主元分析法等,其本質均是求得使誤差最小的旋轉矩陣和平移矩陣[19-20]。本研究通過在患者腹部粘貼標記點,基于三維影像空間坐標系和電磁導航坐標系下粘貼的標記點作為配準標記點,采用基于SVD 的剛性空間配準算法。
在任意兩個相同尺度笛卡爾三維坐標系中,存在P{p1,p2,…,pn}和Q{q1,q2,…,qn}兩個匹配點集,pi和qi為兩個坐標系中對應的匹配點。本文基于SVD 算法求解配準點集之間所需的剛體變換,即求解旋轉矩陣R和平移向量t的最小化,對齊誤差如公式(1)所示。
式中,SO(3)為三維旋轉群;R∈SO(3)為旋轉矩陣;R為正交矩陣,且行列式為1;R3表示笛卡爾三維坐標系。
計算點集P 的中心點和點集Q 的中心點q,計算方式分別如公式(2)和公式(3)所示。
為計算旋轉矩陣,需要消除平移向量影響,故需要將點集重新中心化,生成新點集X 和Y,其中xi和yi分別表示新點集中的點,具體計算方式如公式(4)所示。
計算點集X 和Y 之間3×3 的協方差矩陣S=XYT。通過SVD 算法分解S 得到S=U∑VT,其中U 和V 均為3×3 的正交矩陣。基于U 和V,計算兩點集之間的旋轉矩陣R 如公式(5)所示。
正交矩陣R 可能是旋轉矩陣或反射矩陣,通過驗證R 的行列式對反射矩陣的情況進一步處理。當det(VUT)=1 時,R 為旋轉矩陣;當det(VUT)=-1 時,R 為反射矩陣,為將旋轉解轉換為旋轉矩陣進行處理,得到旋轉矩陣如公式(6)所示。將R 帶入公式(6),計算得到兩點集之間的平移向量t,其計算方式如公式(7)所示。
1.3 肝腫瘤熱消融穿刺電磁導航系統的設計
1.3.1 系統整體設計
肝腫瘤熱消融穿刺電磁導航系統功能框圖如圖1 所示,主要由數據管理、空間配準和路徑規劃3 個模塊組成。數據管理模塊實現CT 圖像的讀取、分割處理和三維可視化。路徑規劃模塊完成消融針進針路徑的合理規劃、交互式調整和實時顯示。空間配準模塊通過電磁設備讀取消融針的空間位置,使消融針沿著規劃的路徑穿刺進入腫瘤。肝腫瘤熱消融穿刺電磁導航系統的主界面如圖2所示,包括數據管理、CT 數據顯示、系統功能等區域,其中系統主要功能區包括設備管理、圖像配準及手術規劃實施。
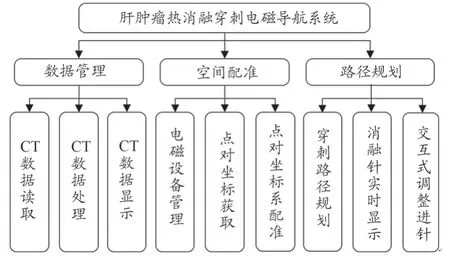
圖1 系統功能框圖
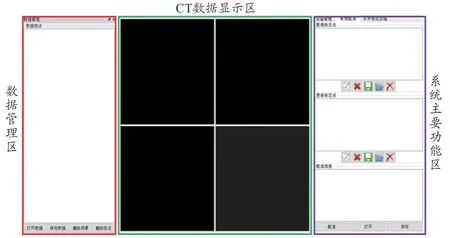
圖2 肝腫瘤熱消融穿刺電磁導航系統主界面
肝腫瘤熱消融穿刺電磁導航系統硬件由電磁定位系統和PC 端三維影像系統組成。如圖3 所示,電磁定位裝置為NDI 公司的NDI Aurora 電磁跟蹤系統,包括控制器和發射線圈兩個部分,可在遮擋的情況下確定患者/腹部體模的實際位置,同時用于實時追蹤裝有電磁傳感器消融針的位姿。裝有電磁傳感器的消融針將電磁傳感器放置于自制電磁傳感器放置套中,安裝固定在消融針尾端。腹部體模采用的是美國Cirs 071A 穿刺體模,包含12 個腫瘤病灶。系統界面利用MFC 設計實現,系統軟件基于ITK、VTK、OpenCV 開源工具包實現,矩陣計算使用Eigen 庫。
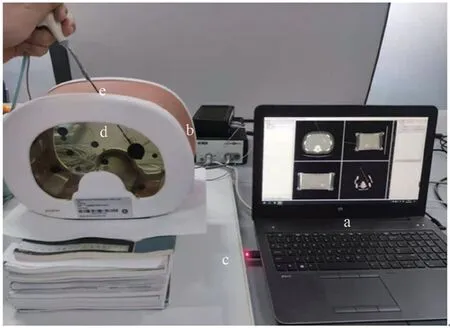
圖3 硬件結構圖
1.3.2 系統工作流程
肝腫瘤熱消融穿刺電磁導航系統工作流程如圖4 所示,在三維影像處理系統導入CT 數據后,通過圖像處理在數據顯示區顯示橫截面、矢狀面和冠狀面圖像及三維重建后的模型。隨后建立三維影像系統與電磁導航系統的通信,通過電磁定位儀獲取腹部粘貼標記點在電磁導航坐標系下位姿信息,同時通過三維影像系統獲取對應標記點在三維影像空間坐標系下的坐標信息,得到兩個對應點集。通過奇異值分解方法求得三維影像空間坐標系和電磁導航坐標系的變換關系。基于三維影像系統對CT 圖像處理獲得的三維模型,進行穿刺手術路徑的規劃,通過對消融針的電磁定位實現實時穿刺導航。
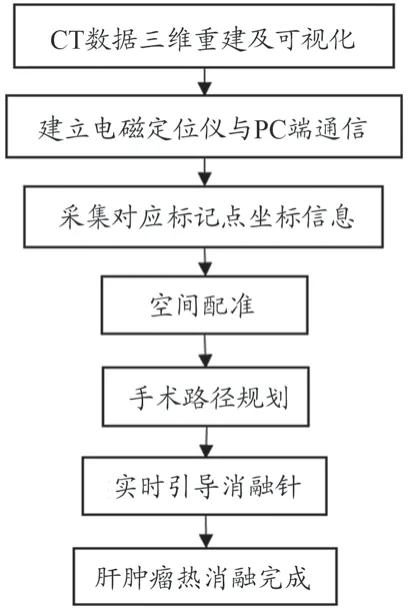
圖4 肝腫瘤熱消融穿刺電磁導航系統工作流程
2 實驗與結果
2.1 空間配準的準確性驗證實驗
對SVD 算法在肝腫瘤熱消融穿刺電磁導航系統的空間配準中準確性進行驗證,設計了腹部體模與其CT圖像的配準實驗來進行測試。
在腹部體模上粘貼6 個標記點(序號1~6)后進行CT 掃描,將掃描得到的圖像進行分割和三維重建。通過電磁定位儀采集腹部體模標記點的空間坐標,使用SVD求解旋轉矩陣和平移向量。腹部體模與重建的三維模型配準示意圖如圖5 所示,在腹部體模與重建三維模型兩個坐標系中,三維模型中序號1~6 標記點與腹部體模中序號1’~6’標記點一一對應。獲取這六對點的空間坐標,通過SVD 變換得到兩個空間坐標系的剛性變換。坐標轉換精度的評價方式通常是利用轉換前后公共點坐標差值的均方根值來進行評價。進行20 次實驗,依據每次實驗中獲取體膜6 個標記點在三維影像坐標系與經轉換求得三維影像坐標系下的坐標計算得到均方根誤差,將計算誤差值與對應實驗編號繪制為柱狀圖(圖6),其中實驗中最大均方根誤差不超過1.5 mm,平均均方根誤差為1.262 mm。
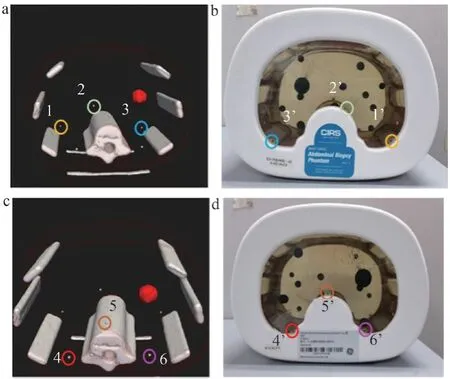
圖5 體模與重建模型配準示意圖

圖6 體膜標記點空間配準均方根誤差柱狀圖
2.2 肝腫瘤熱消融穿刺電磁導航系統精度驗證實驗
為評估肝腫瘤熱消融穿刺電磁導航系統的精度,本文設計了如圖7 所示的模型實驗。在對掃描后的腹部體模CT 影像進行三維重建并手動規劃穿刺路徑后,建立PC 端導航系統軟件與電磁定位儀的通信,來獲取穿刺消融針的空間位置。在進行肝腫瘤穿刺路徑規劃后,手持消融針,依據實時映射在三維影像坐標系中的消融針位姿對消融針進針位置與角度進行調整,直至三維影像中消融針與規劃路徑重合,將消融針沿著規劃穿刺路徑進針。當三維影像中顯示消融針針尖到達腫瘤中心位置時,完成進針引導。
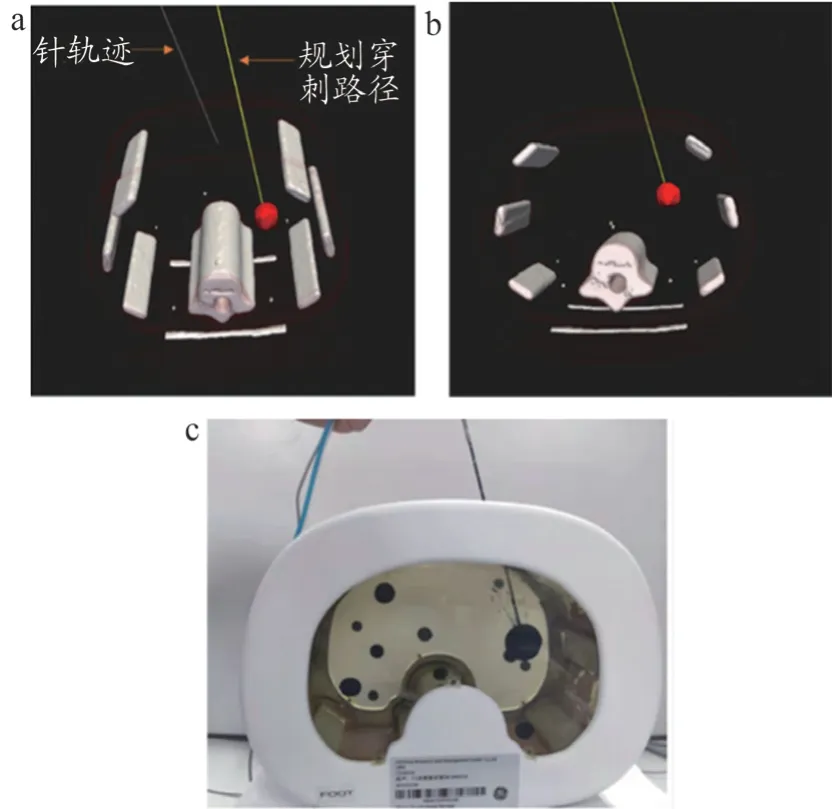
圖7 系統引導消融針穿刺示意圖
本文選取的5 位操作人員均為之前未接觸過該系統且無臨床操作經驗的實驗室人員,參照上述步驟對體模中5 個腹部模擬腫瘤進行了精度驗證實驗,實驗結果如表1 所示,其中目標位置誤差為穿刺后消融針針尖位置與規劃路徑末端位置的均方根誤差。由表1 可知,系統最大目標位置誤差不超過5.00 mm,平均目標位置誤差為3.10 mm。
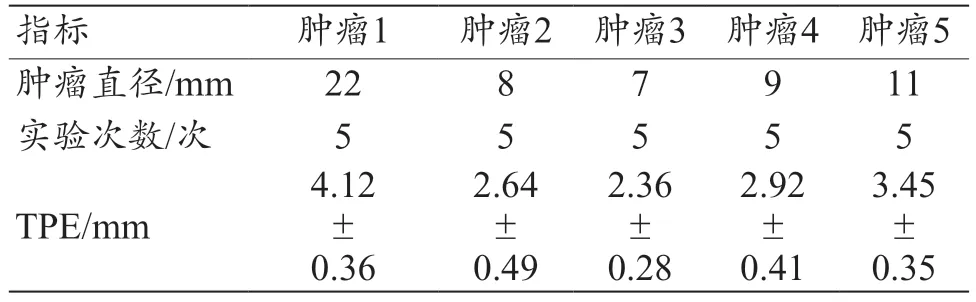
表1 模擬腫瘤穿刺實驗結果
3 討論
本文針對肝腫瘤熱消融治療過程中消融針實時引導問題,開發了一套肝腫瘤熱消融穿刺電磁導航系統。實驗結果顯示,標記點從電磁導航坐標系映射到三維影像坐標系,坐標信息與實際三維影像坐標系對應標記點坐標基本相同,但還存在一定誤差。分析出現上述誤差的主要原因是在電磁定位針采集腹部體模標記點坐標時,定位針的放置可能存在偏差;同時標記點數量以及體模在磁場空間中放置位置可能會對配準精度造成一定的影響。實驗結果表明,配準算法最大均方根誤差不超過1.5 mm,平均均方根誤差為1.262 mm,算法誤差較小,具有較好的精度,可應用本文所設計的導航系統,實現患者與其三維影像的配準。
Teng 等[11]基于電磁導航系統協助醫生完成1 例肺腫瘤消融手術,在術后評估中未出現出血、氣胸、感染、胸腔積液等并發癥,表明電磁導航系統輔助消融手術治療具有可行性。Zhang 等[16]基于電磁導航系統在CT 引導下進行肝腫瘤熱消融手術,實驗證明電磁導航系統與徒手穿刺相比可有效減少患者輻射暴露與相關儀器的調整次數,對肝腫瘤熱消融手術起到很好的輔助作用。Liu等[21]評估將腹腔鏡超聲圖像、腹腔鏡視頻和針頭軌跡統一于同一視圖的增強現實系統,其目標定位誤差為11.1 mm,所需平均穿刺針放置時間為22.9 s。Li 等[22]提出了腹部腫瘤穿刺消融手術導航中一種無標記手術配準方法,模擬實驗穿刺結果表明,術后CT 圖像顯示的針尖位置與實際穿刺目標之間的距離平均為4.117 mm。Xiao 等[23]提出一種自動提取腹部表面區域的方法,其對Kinect 的安裝有嚴格的要求,以保證其z軸垂直于CT 床,如果沒有基準或測量設備很難實現。梁亮亮等[24]通過電磁定位引導體模內橡膠小球穿刺的實驗研究中,體膜的配準精度平均誤差為(0.826±0.029) mm。Ringe 等[25]評估了電磁導航系統的準確性,其穿刺平均偏差為(3.2±1.9)mm,與傳統CT 引導微波消融相比準確性更高。本研究中的系統最大目標位置誤差不超過5.00 mm,平均目標位置誤差為3.10 mm,表明本文設計的電磁導航系統能實現消融針的實時導航,對臨床操作經驗較少的人員具有一定的輔助與指導作用。
但本文系統還需要在以下幾方面進一步改進:① 系統對穿刺路徑進行手動規劃,依賴于醫生的臨床經驗,后續將優化對穿刺路徑的規劃,實現穿刺路徑的自動規劃。② 肝臟為非剛性組織,本文未考慮術中呼吸運動與穿刺過程中造成的肝臟形變。構建個性化的呼吸運動模型及針-組織交互模型,在此基礎上實現消融針的實時定位更具有臨床價值。③ 本系統只使用體模進行實驗,系統有效性也存在一定的局限性,后續還需要進行動物和臨床實驗。④ 系統仍使用徒手穿刺,現有研究結合機械臂進行肝腫瘤熱消融穿刺,使得穿刺準確性、安全性均有了一定提升,下一步可結合機械臂進行研究[26]。
4 結論
本文設計了一套肝腫瘤熱消融穿刺電磁導航系統,實現了CT 數據的讀取和可視化、穿刺路徑規劃以及基于電磁定位實時反饋消融針的空間位姿。通過腹部體模實驗,初步驗證了肝腫瘤熱消融穿刺電磁導航系統的準確性和可行性。
