雨刮-風窗接觸系統摩擦振動分析
2023-09-20 11:54:40楊雪袁濤郭輝傅偉黃雙張巖
農業裝備與車輛工程 2023年9期
楊雪,袁濤,郭輝,傅偉,黃雙,張巖
(1.201620 上海市 上海工程技術大學 機械與汽車工程學院;2.255000 山東省 淄博市 淄博市技師學院;3.250000 山東省 濟南市 中國人民解放軍32128 部隊)
0 引言
隨著新能源汽車的快速發展,發動機、傳動系統等主要噪聲源得到大幅改善,原來被忽視的次要噪聲逐漸受到研究學者的關注。雨刮-風窗系統作為汽車振動和噪聲源之一,合理設計使其具有良好特性成為改善車輛NVH(Noise、Vibration、Harshness)性能的重點之一[1]。但是在眾多的研究中,理論模型忽略了雨刮片現實工況等影響因素[2-3],基于試驗臺進行的實驗,由于其結構簡單,結果往往不能有效驗證雨刮-風窗系統所建立的理論模型[4-6];基于真實車輛的實驗研究由于設備安裝空間有限,所獲結果亦不足以解釋振動和噪聲產生的機理[7-9]。
本文基于雨刮片在不同工況下的振動噪聲差異,首先建立考慮反轉過程的雨刮片理論模型,計算求解出雨刮片的摩擦振動特性曲線,然后利用完善的雨刮-風窗實驗系統對理論模型進行驗證。
1 雨刮-風窗接觸系統摩擦振動理論模型
雨刮-風窗接觸系統主要由雨刮片、風窗和雨刮臂組成,如圖1 所示;雨刮片細節橫截面如圖2 所示。
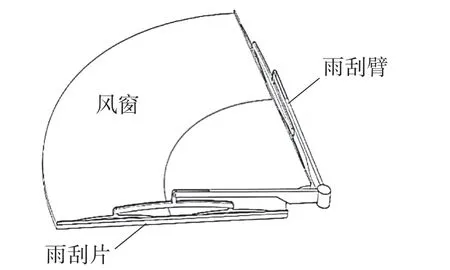
圖1 雨刮-風窗系統整體結構Fig.1 Overall structure of wiper-windscreen system
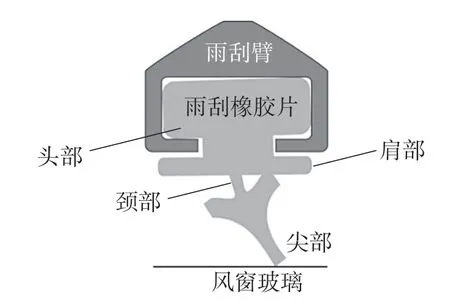
圖2 雨刮片截面圖Fig.2 Cross-sectional view of wiper blades
雨刮片在反轉前后振動并產生不利的噪音。本文在Unno 等[10]和Yang 等[11]所構建模型的基礎上,進一步將刮片尖部細分為l1和l2兩部分,并考慮阻尼材料對結果影響,以更好揭示接觸系統的摩擦振動機理。理論模型如圖3 所示,雨刮片的頭部由雨刮臂沿水平方向前后移動,頸部和尖部通過連桿連接。
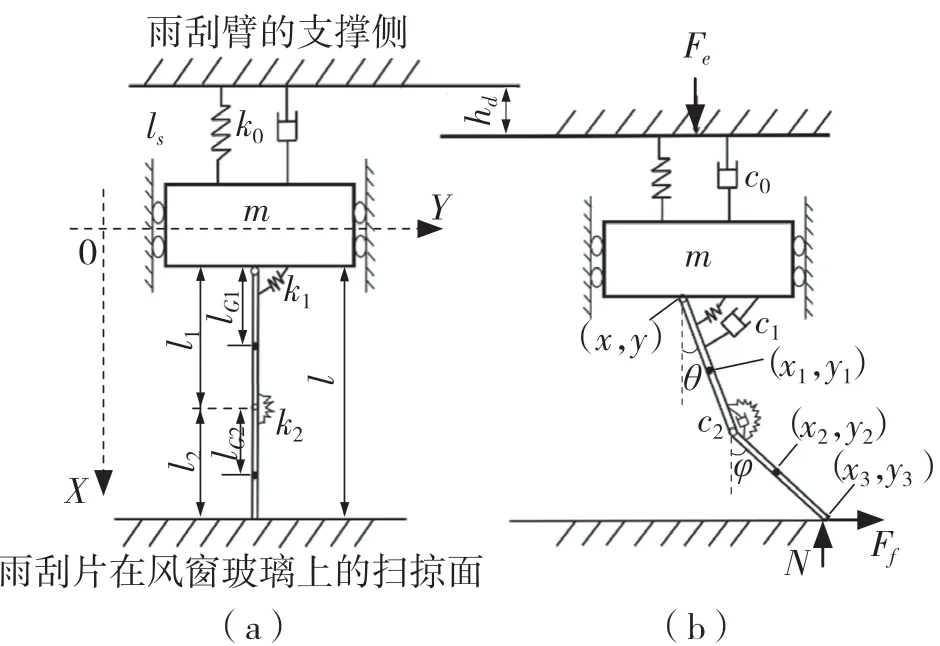
圖3 雨刮片物理模型Fig.3 A link model of wiper blades
圖3(a)和圖3(b)分別顯示了雨刮片連桿模型的靜態和動態。坐標系的原點位于平行于雨刮片頭部的位置,X軸和Y軸表示垂直和水平方向。圖3 中:N、Ff——作用在風窗表面的法向力和摩擦力;Fe——雨刮臂對刮片施加的法向力;θ、φ——連桿與垂直軸之間的夾角,雨刮片剛接觸掃掠面時,雨刮片直立,θ和φ為0;ls、hd——頭部和支撐側與X軸的位移。
在鏈接模型中,(x,y),(x1,y1),(x2,y2),(x3,y3)分別表示頭部的位移,頸部、尖部以及尖部頂部的重心。假設雨刮片是沿Y軸方向的往復運動,頭部的水平位移可以定義為
式中:a——振幅;ω——角頻率;Y——位移,已知量。
其余不同部位的水平位移可以表示為
各部分沿X軸的位移可以表示為
雨刷片約束可以表示為
根據D Alembert's 原理,∑MC=0,
無量綱參數定義如表1 所示,則頸部和尖部的角加速度方程可改寫為
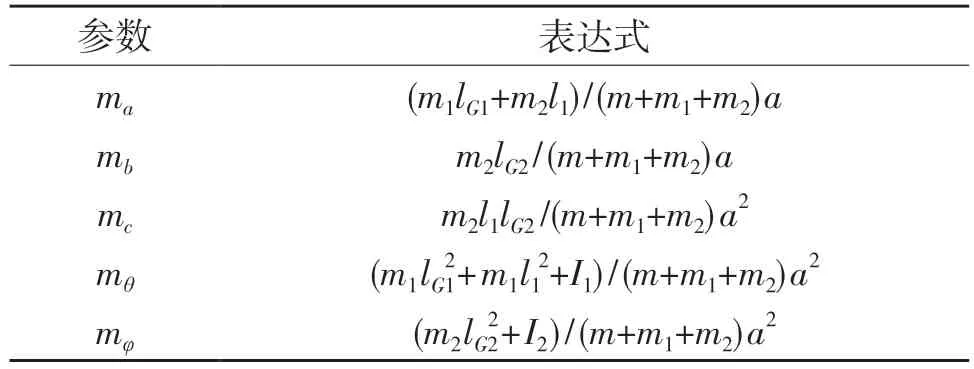
表1 某些無量綱參數及其表達式Tab.1 Some dimensionless parameters and their corresponding expressions
式(12)、式(13)中A、B、C根據現實運行工況確定。
2 數值仿真
利用龍格-庫塔法(Runge-Kutta methods)求解式(12)和式(13)[12]。其中雨刮片轉速設置為1 m/s,雨刮片的初始條件(t=0)設置如表2 所示(其余模型參數值借鑒文獻[10-11])。為了便于實驗驗證,角加速度在求解之后直接轉化為振動加速度aφ和aθ。

表2 數值仿真中初始參數值設置Tab.2 Setting of initial parameter values in the simulations
圖4 為數值仿真的雨刮片不同部位2 個周期的運動,每個周期約為2.5 s。加速度的正、負值表示刮刷方向(假設向上刮刷為正)。從圖4 可見,刮片在反轉后(如2.5 s時)產生強烈的沖擊振動,振動加速度的最大值約為63 m/s2。由3.4~4.2 s 的局部放大圖可知,當雨刮片在3.8 s 處反轉時,反轉前的低頻顫振在反轉后迅速轉變為強烈的高頻振動。此外,雨刮片的尖端和頸部產生的是同頻振動,且尖端的角加速度大于頸部的角加速度。
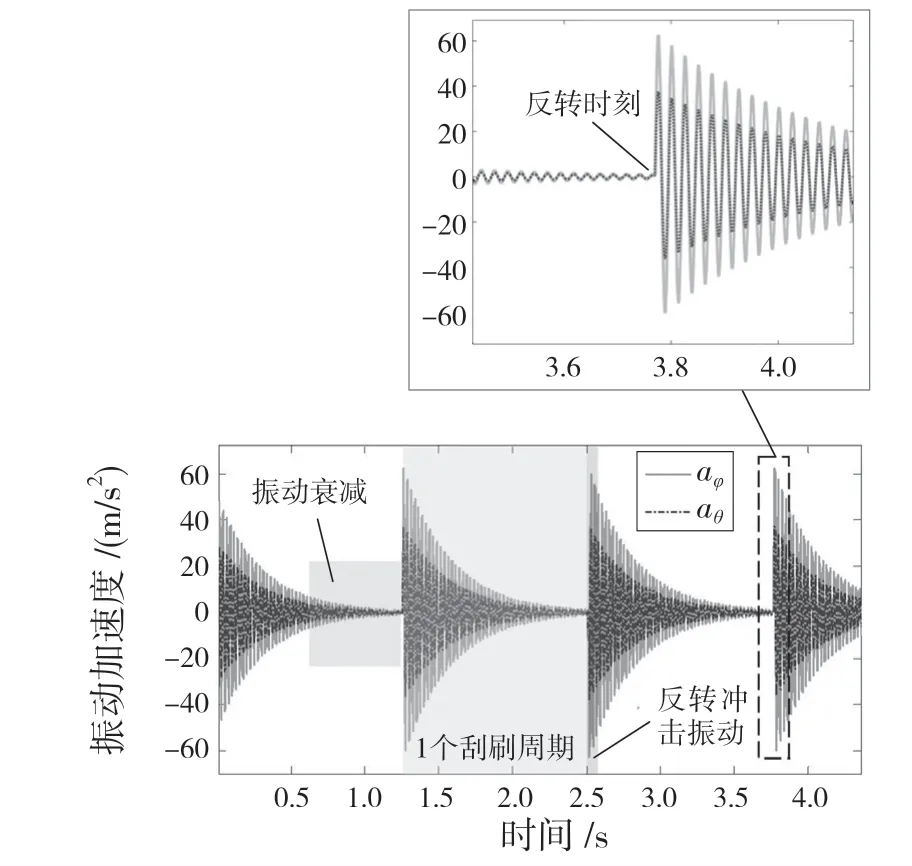
圖4 雨刮片在1 m/s 速度下振動加速度aφ 和aθ Fig.4 Simulated results of vibration accelerations aφ and aθ of wiper blade angle at a speed of 1 m/s
3 實驗驗證
應用雨刮-風窗摩擦振動實驗系統驗證理論模型的有效性,如圖5 所示,測試系統主要包括驅動控制系統、數據采集系統和電腦等。雨刮片的振動加速度采用32 通道LMS 數據采集系統進行測量,采樣頻率為6 400 Hz,頻率分辨率為1 Hz。與真實車輛的實驗不同,本實驗系統在雨刮片上安裝振動傳感器,且刮刷速度、反轉速度及反轉時間可在實驗系統伺服電機的控制下改變。

圖5 雨刮-風窗摩擦振動實驗測試系統Fig.5 Experimental system for measuring wiperwindscreen frictional vibration
雨刮片以1 m/s 的速度刮刷時,數據采集系統采集到的振動加速度信號如圖6 所示。為便于驗證理論模型的有效性,實驗與數值仿真速度設置為相同的值。圖6 為11 s 內雨刮片的刮刷運動,其中每個刮刷周期的持續時間約為2.5 s,振動加速度正負值與數值仿真中的含義相同。由圖6 可見,反轉后的振動最明顯,每次反轉后(例如7.3 s)會產生強烈的沖擊振動,最大振動加速度約為65 m/s2,與第2 節獲得的數值仿真結果較好地吻合。由局部放大圖可見,在反轉之前振動衰減,當雨刮片在11 s 反轉時,反轉前的低頻顫振迅速轉變為反轉后的高頻振動,該結果與圖4 的仿真結果相同。
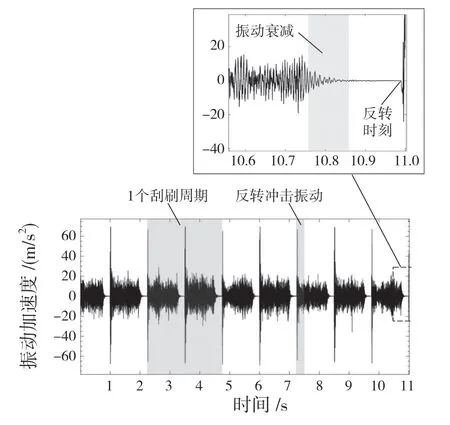
圖6 以1 m/s 速度運動的雨刮葉片振動加速度實驗結果Fig.6 Experimental results of vibration acceleration of wiper blade moving at a speed of 1 m/s
通過以上比較可以得出,反轉沖擊振動和反轉前后加速度變化模式等實驗和仿真結果具有較好的一致性。因此,本文提出的雨刮片理論模型在計算振動特性上是準確的。
4 結論
本文建立了用于研究雨刮-風窗接觸系統摩擦振動的理論模型。通過考察接觸系統工作反轉過程中產生的振動及異響,綜合考慮雨刮片截面細節建立并推導了動力學解析式。采用龍格-庫塔法對解析式進行求解,模擬了雨刮片產生的振動及反轉情況。仿真結果表明,葉片的頸部和尖部在工作中的振動為同頻振動。利用雨刮-風窗實驗系統進行了摩擦振動實驗,再現了雨刮片的振動行為,同時證明在1 m/s 的常用工況下實驗結果和仿真結果具有較好的一致性,驗證了所建理論模型的有效性。本文所建立的理論模型和實驗所得結果可為雨刮片結構優化提供一定參考。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
天天愛科學(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
數學物理學報(2017年6期)2018-01-22 02:26:40
發明與創新(2016年38期)2016-08-22 03:02:52