基于改進指數趨近律的永磁同步電機滑模控制
2023-09-20 11:54:58諸德宏高齊
農業裝備與車輛工程 2023年9期
諸德宏,高齊
(212013 江蘇省 鎮江市 江蘇大學 電氣信息工程學院)
0 引言
伴隨著材料科學的發展,永磁同步電機(以下簡稱PMSM)因其結構簡單、功率密度高、轉子損耗小、起動轉矩大等許多優點[1],在越來越多的伺服系統領域中得到運用,包括航天、電動汽車以及農業電氣設備領域等[2]。
PMSM 的控制系統性能與控制算法相關,工業上常用的傳統矢量控制采用的是雙閉環控制,即轉速外環和電流內環的控制策略,2 種控制環均采用PI 控制器[3]。對控制要求不高的系統,PI 控制已能滿足基本要求,但對控制精度要求高的系統,PMSM 的非線性、強耦合的特點會使PI 控制效果大打折扣,對此,專家學者提出了多種控制器替代PI 控制器[4-5]。Wang 等[6]設計了一種滑模變結構高性能PMSM 直接轉矩控制的系統,缺點是增加了控制系統的復雜性;Shi 等[7]提出一種新型趨近律,并設計了滑模速度控制器,將觀測值補償到速度控制器中,提升了控制系統抗擾性;Jiang 等[8]采用混合趨近律的滑模觀測器,能夠有效減小轉速觀測誤差,抑制轉矩脈動,提高系統的觀測精度和動態響應性能;余江等[9]在傳統指數趨近律的基礎上,分析解決超調大、抖振幅度大等問題,并將符號函數進行平滑處理;楊小聰[10]為優化PMSM 速度調節系統的動態性能,研究了使用滑動模式控制的非線性速度控制算法;金晶等[11]提出了一種用于PMSM 伺服系統的自適應卡爾曼觀測器(SAKO),SAKO 可以彌補分辨率有限的絕對編碼器的測量噪聲,避免傳統測速方法的微分過程和濾波延遲。高為炳[12]通過對設計的滑模控制和DPCC 反饋來補償估計值,以提高速度魯棒性和當前跟蹤精度;付東學等[13]通過對傳統終端滑模控制進行改進,設計了一種具有非奇異性的改進型快速終端滑模控制策略,該方法可以有效地抑制傳統終端滑模控制中存在的抖振現象,減小了奇異性對系統造成的影響,提高了系統的響應速度。同時,為了估計系統擾動中存在的不確定參數,在滑模控制器的設計中引入了自適應控制,削弱了擾動對系統產生的影響,提高了系統的魯棒性,但由于整體算法設計較為復雜,導致狀態變量較難定義;Chen 等[14]通過改進傳統滑模面,提出了一種基于分數階滑模面的滑模控制方法,該方法有效地減弱了系統狀態點在滑模面上向平衡點滑動過程中存在的抖振現象,優化了系統的跟蹤性能。為進一步減弱擾動對系統性能的影響,該方法引入了自適應模糊觀測器來觀測并補償系統的擾動項,但由于模糊規則的存在,設計需要大量的實驗數據,導致設計過程十分復雜。綜上所述,優秀的算法的確可以提高系統的控制效果和跟蹤性能,但同時也增大了系統的計算量和計算難度。因此,要想獲得更加優異的控制效果就必須為滑模控制器設計一個合理的趨近律。
本文提出了一種基于改進指數趨近律的新型PMSM 滑模變結構控制策略,改進的指數趨近律通過引入更加平滑的fal(s,α,δ)函數,代替傳統的sgn(s)函數,并改進了趨近時的函數,進而提升了系統狀態點在接近滑模面時的切換效果和趨近速率。通過李雅普諾夫(Lyapunov)函數,驗證了改進趨近律的穩定性。最后通過仿真對比傳統指數趨近律和快速指數趨近律,結果表明由該趨近律設計的速度控制器具有良好的控制性能,有效削減了系統的抖振,提高了系統的快速性和魯棒性。
1 改進趨近律設計
1.1 傳統指數趨近律
式(1)中的傳統指數趨近律[15]分為2 部分:等速趨近項εsgn(s)和指數項趨近項ks。系統處于起動階段時|s|較大,此時指數項起主要作用,迫使系統狀態點快速趨近于滑模面;當系統狀態點接近滑模面時,等速項起主要作用,此時系統趨近速度由系數ε決定。
對于傳統指數趨近律,當s>0 時有
假設t=0 時,s=s0,化簡式(2)有
式(3)中的系數ε和k分別決定了等速項和指數項的趨近速度。由式(3)可直接看出,增大相關系數的確可以加快系統狀態點到達滑模面的時間,但同時也會加劇到達滑模面后的抖振,導致減小趨近時間和削弱滑模抖振的矛盾。
1.2 快速指數趨近律
如式(4)所示
式中:ε>q,q>0,a>0,b>0。
通過引入變量函數[16-17],改善了系統性能,雖然超調和抖振得到有效抑制,但系統的響應速度變慢,同時增加了系統響應時間。當系統狀態點離滑模面較遠時,變量函數趨近速度大,系統狀態點快速接近滑模面,但由于符號函數的存在,系統狀態點在到達滑模面后會出現劇烈抖動,影響系統的動態性能[18-19]。
1.3 改進指數趨近律
為了減少傳統指數趨近律和快速指數趨近律接近滑模面[20]時符號函數帶來的抖振,設計并提出了一種改進的指數趨近律。
式(5)中fal(s,α,δ)的表達式為
式中:α——非線性影響因子;δ——濾波影響因子;x1——系統狀態變量,x1=ωr-ωm。k1>0,k2>0,0<α<1,δ>0,1 <γ<2,β>0。
式(5)引入的fal(s,α,δ)是一種非線性連續函數,具有快速收斂的特性,替代原來的sgn(s)函數,使得滑模控制的滑動過程更加平滑,同時減少了系統的抖振。
1.4 改進指數趨近律穩定性分析
構建Lyapunov 函數,驗證改進后的新型趨近律的穩定性,驗證過程為
由于sgn(s)與s同號,ssgn(s)>0,所以。
比較3 種趨近律的收斂性,效果如圖1 所示。由圖1 可以明顯看出,改進后的趨近律相比傳統指數趨近律、快速指數趨近律在控制效果和控制時間上都得到了改善。
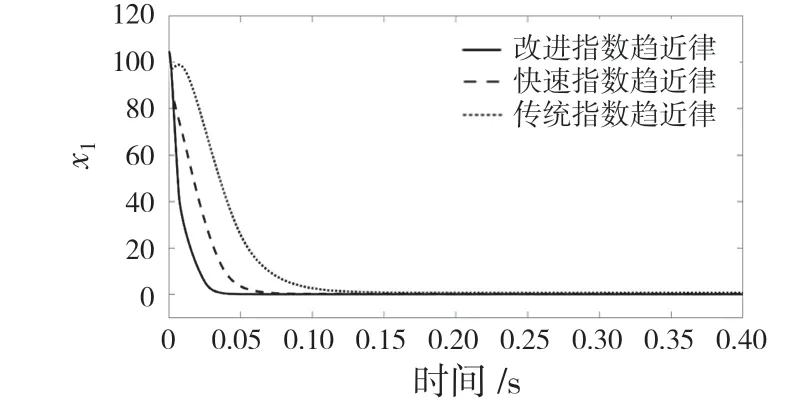
圖1 趨近律收斂性比較Fig.1 Comparison of the convergence of reaching law
2 滑模速度控制器設計
2.1 PMSM 數學模型
在假設電機元件、運行條件為理想狀態的前提下,簡化電機數學模型。對于表貼式PMSM,在id=0 的條件下,選取旋轉坐標系d-q軸下的數學模型,PMSM 定子電壓方程為
由式(11)化簡得:
式中:ud,uq,id,iq——d,q軸的電壓和電流;Rs——定子電阻;Ls——定子電感;ωe,ωm——電氣角速度和機械角速度;φf——磁鏈;Pn——電機極對數。電機的電磁轉矩方程和機械運動方程為
式中:Te——電磁轉矩;TL——負載轉矩;J——轉動慣量。
2.2 控制器設計
構建PMSM 系統的狀態變量
式中:ωr——電機的給定轉速。
選取的滑模面函數為
式中:c1——待設計的參數。
對式(17)兩邊同時求導可得:
結合式(5)中提出的改進型趨近律與式(18)可得控制器u的表達式為
對u積分可得q軸的參考電流的表達式為
3 仿真結果分析
根據參考電流的表達式,在MATLAB 中的Simulink 模塊搭建速度控制器的仿真模型。PMSM電機相關參數如表1 所示。
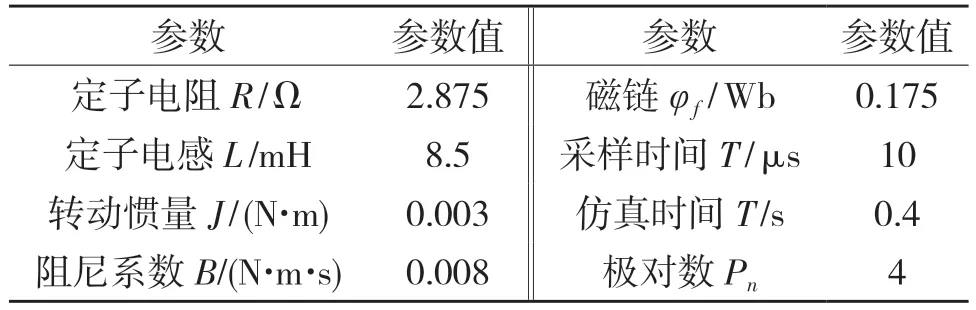
表1 電機參數Tab.1 Motor parameters
控制算法中的相關參數取值如表2 所示。

表2 控制算法參數設置Tab.2 Control algorithm parameter settings
系統給定轉速為1 000 r/min,并在0.2 s 時突加負載,觀察系統的轉速、轉矩和電流變化。PMSM 控制系統的MATLAB 仿真結構圖如圖2 所示,由電流環和轉速環雙閉環組成。電流環仍采用普通的PI 控制,轉速環加入了改進指數趨近律的滑模速度控制器。對比傳統指數趨近律控制器、快速指數趨近律控制器和本文的改進指數趨近律控制器,三者的轉速仿真結果如圖3 所示。
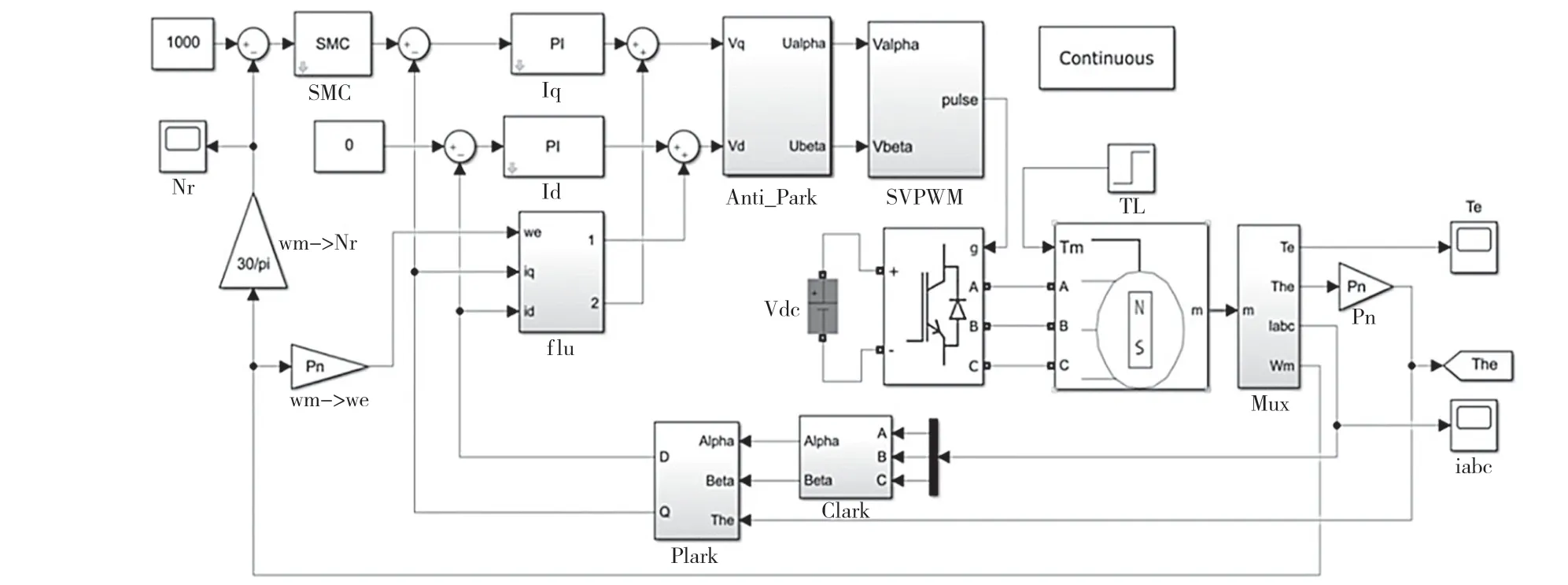
圖2 MATLAB 仿真結構圖Fig.2 MATLAB simulation structure diagram
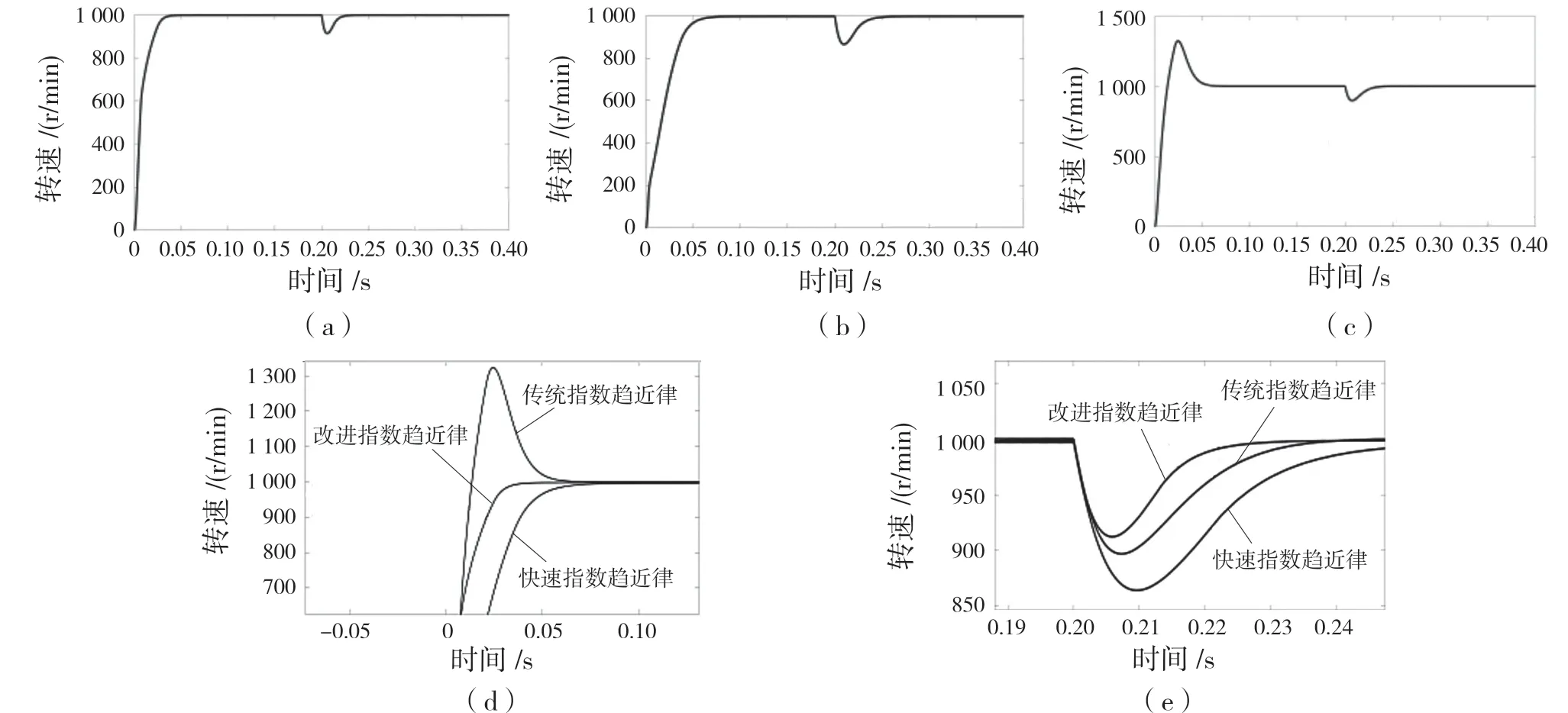
圖3 3 種指數趨近律下轉速控制比較Fig.3 Comparison of speed control under three exponential reaching laws
圖3(a)為改進指數趨近律控制器的轉速響應曲線,起動階段有斜率的變化是由于系統狀態點接近滑模面,fal(s,α,δ)切換所導致的,這使得起動速度略微下降,但相較于傳統趨近律控制器和快速趨近律控制器下的起動轉速,改進后的趨近律仍有較好的作用。圖3(b)為快速指數趨近律控制器下轉速的響應曲線,相較于傳統指數趨近律控制器,在起動階段的超調得到了很好的抑制,但響應到達穩定狀態的時間延長了,且對于負載擾動變化較為敏感。圖3(c)為傳統指數趨近律控制器下的轉速響應曲線,其優點是系統的響應速度快,缺點是超調量較大,對于穩定性要求較高的控制系統,傳統趨近律控制器很明顯不能達到控制要求。
從圖3(d)對比中的仿真效果來看,在起動階段,傳統指數趨近律控制器雖然趨近速快,但超調量較大,到達穩定狀態的時間也較長;快速指數趨近律控制器改善了傳統趨近律的超調情況,但同時導致到達穩定的時間過長;改進指數趨近律可以很明顯地看到,由于非線性因子的作用,系統的超調情況和快速性都得到了很好的改善。同時,對于圖3(e)中的突變負載的擾動,改進指數趨近律也同樣表現了良好的控制性能。
圖4(a)為改進指數趨近律控制器下的轉矩響應曲線,在起動階段,改進指數趨近律控制器的轉矩響應到達穩定狀態的時間更短,這說明了控制方法的快速性,同時在到達穩定狀態的過程中,改進后的控制器對于系統擾動具有更好的抑制作用。圖4(b)為快速指數趨近律控制器下的轉矩響應曲線,該方法減小了系統起動階段的超調,但同時導致系統的響應時間延長,且轉矩對于系統擾動敏感,系統的魯棒性差。圖4(c)為傳統指數趨近律控制器下的轉矩響應曲線,其最明顯的問題在于超調過大。通過圖4(d)對比可以看出,在起動階段,改進指數趨近律控制器相較于傳統指數趨近律控制器和快速指數趨近律控制器而言,系統抖動更小,到達穩定狀態的過程更加穩定。對于突加的擾動,改進后的趨近律響應更為迅速,但存在一定的超調問題。
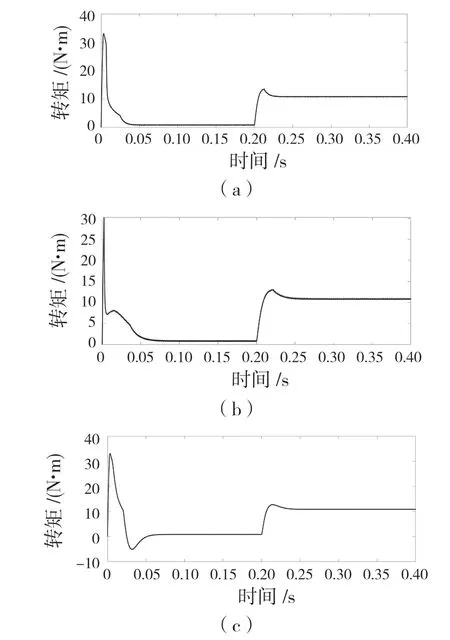
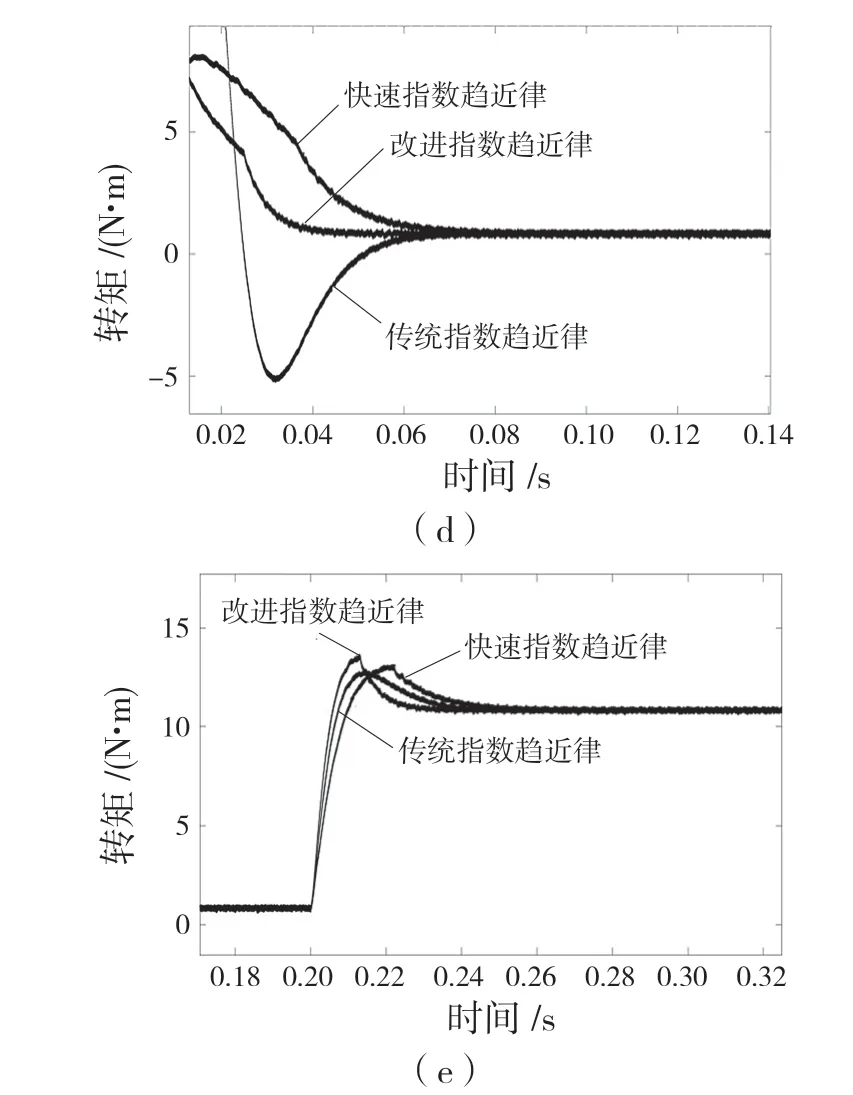
圖4 轉矩在不同趨近律下的響應Fig.4 Response of torque under different reaching laws
4 結論
本文通過引入fal(s,α,δ)函數,并改進了趨近時的函數,設計了一種改進的指數趨近律,分析了收斂性,驗證了趨近效果,并設計出了基于該趨近律的滑模速度控制器,將控制器運用到了PMSM的速度控制中。通過仿真驗證了改進指數趨近律控制器的快速性以及抑制抖振的性能,并將其與傳統指數趨近律控制器和快速指數趨近律控制器進行對比,結果表明,改進指數趨近律控制器提高了系統的魯棒性和快速性,優化了系統的動態性能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17