3T1R解耦并聯(lián)機(jī)構(gòu)動(dòng)力學(xué)與慣量耦合特性分析
2023-09-23 06:39:06朱小蓉沈惠平
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2023年9期
朱小蓉 趙 磊 沈惠平
(常州大學(xué)機(jī)械工程學(xué)院,常州 213164)
0 引言
四自由度(3CRR/R)&CRU并聯(lián)機(jī)構(gòu),是對(duì)Quadrupteron機(jī)構(gòu)進(jìn)行結(jié)構(gòu)降耦所得[1-2],機(jī)構(gòu)具有運(yùn)動(dòng)解耦、耦合度低、工作空間大、轉(zhuǎn)動(dòng)能力強(qiáng)等特點(diǎn),在裝配、包裝及碼垛等高速運(yùn)動(dòng)工程領(lǐng)域有較好的應(yīng)用前景。
良好的動(dòng)力學(xué)性能是高速運(yùn)動(dòng)并聯(lián)裝備的重要保證。目前并聯(lián)機(jī)構(gòu)動(dòng)力學(xué)建模主要有拉格朗日法[3-4]、虛功原理[5-8]、牛頓-歐拉法[9-14]等方法,其中牛頓-歐拉法因?yàn)楦拍钋逦㈥P(guān)節(jié)支反力/力矩可由平衡方程遞推獲得而得到了廣泛應(yīng)用。LI等[9]基于牛頓-歐拉法對(duì)一種4自由度SCARA型并聯(lián)機(jī)構(gòu)進(jìn)行動(dòng)力學(xué)建模,以單驅(qū)動(dòng)關(guān)節(jié)的驅(qū)動(dòng)力最小為優(yōu)化目標(biāo)實(shí)現(xiàn)了機(jī)構(gòu)的尺寸綜合。王庚祥等[10]將機(jī)構(gòu)的關(guān)節(jié)摩擦力視為非保守內(nèi)力,采用牛頓-歐拉法建立了含恰約束支鏈4-SPS/CU并聯(lián)機(jī)構(gòu)的動(dòng)力學(xué)方程,推導(dǎo)出關(guān)節(jié)的約束反力/力矩,并討論了關(guān)節(jié)摩擦對(duì)機(jī)構(gòu)驅(qū)動(dòng)力的影響。馮志友等[11]采用牛頓-歐拉法對(duì)2UPS-2RPS并聯(lián)機(jī)構(gòu)進(jìn)行動(dòng)力學(xué)建模,討論了給定動(dòng)平臺(tái)運(yùn)動(dòng)規(guī)律和外力條件下的機(jī)構(gòu)驅(qū)動(dòng)力和約束力矩。CHEN等[12]基于牛頓-歐拉法,通過設(shè)置兼容方程,建立了一種過約束并聯(lián)機(jī)構(gòu)的動(dòng)力學(xué)方程,并以驅(qū)動(dòng)力最小為優(yōu)化目標(biāo)進(jìn)行動(dòng)力學(xué)性能優(yōu)化。GUO等[13]考慮球關(guān)節(jié)、萬向節(jié)和滾珠絲杠的摩擦效應(yīng),采用牛頓-歐拉法建立了5自由度混聯(lián)機(jī)器人的顯式動(dòng)力學(xué)模型。
并聯(lián)機(jī)構(gòu)的閉環(huán)多分支結(jié)構(gòu)特征導(dǎo)致了支鏈之間存在較強(qiáng)的耦合,影響機(jī)構(gòu)高速、重載運(yùn)動(dòng)時(shí)的動(dòng)態(tài)性能。TOURASSIS等[15]提出了機(jī)器人動(dòng)力學(xué)方程中慣量矩陣的中心地位,解釋了慣量矩陣的結(jié)構(gòu)特征及物理意義,并以串聯(lián)機(jī)器人為例引入慣量耦合系數(shù)對(duì)機(jī)構(gòu)動(dòng)力學(xué)特性進(jìn)行評(píng)價(jià)。ASADA[16]利用慣量橢球來表征剛體的動(dòng)力學(xué)特性。這種基于慣量的動(dòng)態(tài)指標(biāo)已逐漸推廣到并聯(lián)機(jī)器人的動(dòng)力學(xué)性能評(píng)估和參數(shù)優(yōu)化,研究工作主要集中在耦合慣性矩陣的分析方面。LIU等[17]對(duì)Stewart平臺(tái)的慣性矩陣進(jìn)行解耦,以慣性矩陣的最大特征值作為慣性指標(biāo),對(duì)Stewart平臺(tái)進(jìn)行尺寸優(yōu)化。宋軼民等[18]定義系統(tǒng)慣性矩陣條件數(shù)的倒數(shù)為評(píng)價(jià)系統(tǒng)動(dòng)力學(xué)性能的局部指標(biāo),對(duì)非冗余3-RRR和冗余4-RRR平面并聯(lián)機(jī)構(gòu)的動(dòng)力學(xué)性能進(jìn)行了比較。王冬等[19]定義機(jī)構(gòu)慣量矩陣的非對(duì)角元素之和作為慣量耦合指標(biāo),以3-PRS并聯(lián)機(jī)構(gòu)為例,分析了耦合指標(biāo)在工作空間內(nèi)的分布,并用實(shí)驗(yàn)進(jìn)行了驗(yàn)證。文獻(xiàn)[20-23]提出了統(tǒng)一量綱的慣量耦合強(qiáng)度指標(biāo),研究了評(píng)價(jià)指標(biāo)隨機(jī)構(gòu)運(yùn)動(dòng)狀況的變化規(guī)律。WU等[24]提出了任務(wù)空間中各向同性的動(dòng)態(tài)性能指標(biāo),綜合考慮了動(dòng)力學(xué)模型中加速度、速度、重力等影響因素,并以4自由度機(jī)器人為例驗(yàn)證了性能指標(biāo)的有效性。
腎結(jié)石治療方法較多,主要分為保守治療、腔鏡治療和手術(shù)治療。保守療法通常無法獲得理想效果。開放手術(shù)會(huì)對(duì)患者造成較大創(chuàng)傷,術(shù)后恢復(fù)時(shí)間長(zhǎng),諸多腎結(jié)石患者對(duì)于此種治療方法不認(rèn)可[4-5]。在隨著泌尿外科微創(chuàng)技術(shù)的快速發(fā)展,腎結(jié)石治療方案中的微創(chuàng)腔鏡手術(shù)獲得廣泛應(yīng)用,同開放手術(shù)方法進(jìn)行比較,術(shù)中出血量、手術(shù)創(chuàng)傷以及術(shù)后并發(fā)癥等方面均呈現(xiàn)出顯著優(yōu)勢(shì)。
本文基于牛頓-歐拉法,考慮構(gòu)件重力以及外負(fù)載建立(3CRR/R)&CRU并聯(lián)機(jī)構(gòu)的逆向動(dòng)力學(xué)模型,并利用有限元仿真驗(yàn)證模型的正確性。基于關(guān)節(jié)空間的慣量矩陣,建立支鏈間慣量耦合強(qiáng)度評(píng)價(jià)指標(biāo),分析其在工作空間內(nèi)的分布規(guī)律,并與結(jié)構(gòu)降耦前的機(jī)構(gòu)進(jìn)行對(duì)比分析。
1 機(jī)構(gòu)描述及運(yùn)動(dòng)學(xué)分析
1.1 機(jī)構(gòu)描述
(3CRR/R)&CRU機(jī)構(gòu)的結(jié)構(gòu)簡(jiǎn)圖如圖1所示,可看成由兩個(gè)子結(jié)構(gòu)并聯(lián)而成。動(dòng)平臺(tái)2一方面通過C41R42U43支鏈直接與靜平臺(tái)0相連;另一方面通過轉(zhuǎn)動(dòng)副RD、中間平臺(tái)1及3條CRR支鏈與靜平臺(tái)0相連,其中3條CRR支鏈相互正交,分別沿x、y、z軸安裝。與Quadrupteron機(jī)構(gòu)相比,該機(jī)構(gòu)由兩個(gè)基本運(yùn)動(dòng)鏈組成,不僅耦合度降低、運(yùn)動(dòng)學(xué)解耦,而且全工作空間內(nèi)所有位置的轉(zhuǎn)動(dòng)能力一致[1],克服了一般并聯(lián)機(jī)構(gòu)耦合度強(qiáng)、控制復(fù)雜的弱點(diǎn)。
機(jī)構(gòu)的4個(gè)驅(qū)動(dòng)副分別安裝在間距為L(zhǎng)的4個(gè)軌道上。在固定軌道上點(diǎn)O建立靜坐標(biāo)系Oxyz,該機(jī)構(gòu)的末端動(dòng)平臺(tái)2能夠?qū)崿F(xiàn)x、y、z3個(gè)方向的移動(dòng)以及繞垂直方向軸線的轉(zhuǎn)動(dòng)。
設(shè)機(jī)構(gòu)輸入矢量為(ρ1,ρ2,ρ3,ρ4),末端輸出點(diǎn)D的位姿為(xD,yD,zD,φ),其中φ為動(dòng)平臺(tái)的姿態(tài)轉(zhuǎn)角。h為中間平臺(tái)和動(dòng)平臺(tái)之間的高度差,動(dòng)平臺(tái)長(zhǎng)度為l,轉(zhuǎn)動(dòng)副Ri3在中間平臺(tái)的安裝基點(diǎn)為點(diǎn)Ci,分布在半徑為r的圓周上,以中間平臺(tái)點(diǎn)N為原點(diǎn)建立圖2所示坐標(biāo)系Nuvw,w軸垂直于中間平臺(tái),NCi與u軸的安裝角為βi。機(jī)構(gòu)定長(zhǎng)桿AiBi、BiCi桿長(zhǎng)分別為li1、li2(i=1,2,3,4);桿件AiBi、BiCi轉(zhuǎn)動(dòng)角分別定義為θi1、θi2(i=1,2,3,4)。
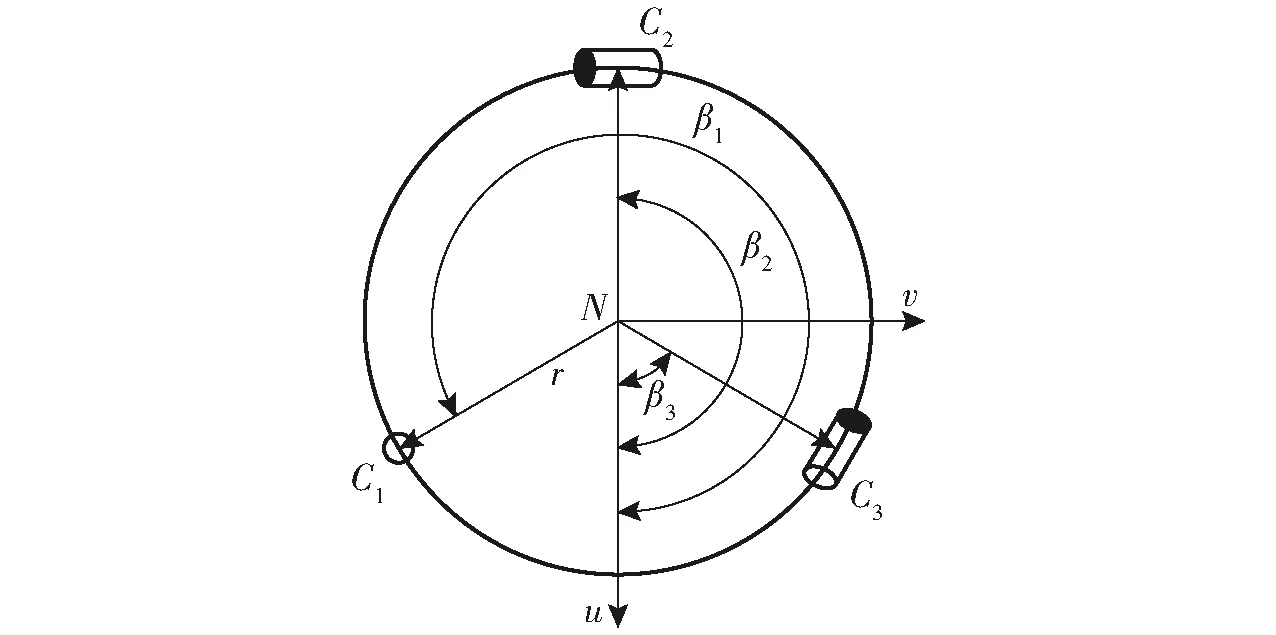
圖2 運(yùn)動(dòng)副在中間平臺(tái)1上的分布
機(jī)構(gòu)支鏈1、2、3、4存在的運(yùn)動(dòng)學(xué)關(guān)系分別為
對(duì)里程樁號(hào)4+845~4+995段使用TGP 206A超前地質(zhì)預(yù)報(bào)處理軟件處理原始地震波三分量原始數(shù)據(jù)(圖8)后得到同側(cè)地震波繞射偏移圖(圖9)和同側(cè)地震波反射界面圖(圖10)。
(1)
(2)
(3)
(4)
式中,c表示余弦函數(shù);s表示正弦函數(shù)。
1.2 機(jī)構(gòu)位置正反解
為驗(yàn)證所建動(dòng)力學(xué)模型的正確性,采用ADAMS軟件對(duì)機(jī)構(gòu)進(jìn)行仿真驗(yàn)證。通過設(shè)置環(huán)境參數(shù)和單位系統(tǒng)并添加相應(yīng)的運(yùn)動(dòng)副約束,虛擬樣機(jī)模型如圖9所示。
1、設(shè)計(jì)總工程師要緊緊把握總布置設(shè)計(jì)專業(yè),并作為搞好工程設(shè)計(jì)質(zhì)量、降低工程造價(jià)的重要環(huán)節(jié)之一來抓。從工程開始就要重視電廠的總體規(guī)劃和全廠總布置工作,從總體規(guī)劃入手,搞好工程設(shè)計(jì)質(zhì)量,認(rèn)真貫徹電力建設(shè)“安全可靠、經(jīng)濟(jì)適用、符合國(guó)情”的十二字方針。
(5)
機(jī)構(gòu)位置正解方程為
(6)
由式(5)、(6)可知,機(jī)構(gòu)x、y、z方向的移動(dòng)輸出與3支鏈的驅(qū)動(dòng)輸入ρ1、ρ2、ρ3存在一一對(duì)應(yīng)關(guān)系,且互相之間獨(dú)立,轉(zhuǎn)動(dòng)輸出僅與ρ2、ρ4相關(guān),故機(jī)構(gòu)具有運(yùn)動(dòng)學(xué)解耦特性。
1.3 動(dòng)平臺(tái)速度和加速度
對(duì)式(6)關(guān)于時(shí)間求導(dǎo),可得
(7)
其中
1.4 中間平臺(tái)速度和加速度
根據(jù)動(dòng)平臺(tái)與中間平臺(tái)的位置關(guān)系,以及機(jī)構(gòu)的位置正反解方程式(5)、(6),可得中間平臺(tái)幾何中心在坐標(biāo)系Oxyz系下的矢量表示為(x1,y1,z1),其中
(8)
ri3、ri4——點(diǎn)Bi、點(diǎn)Ci相對(duì)于質(zhì)心的位置矢量
1.5 驅(qū)動(dòng)桿AiBi速度和加速度
由式(1)~(4)可推導(dǎo)得
Misθi1+Nicθi1=Ki(i=1,2,3,4)
(9)
其中
(10)
(11)
(12)
(13)
對(duì)式(9)求解,可得桿AiBi轉(zhuǎn)動(dòng)角為
(14)
則桿件AiBi質(zhì)心速度和角速度為
(15)
(16)
式中eAiBi——點(diǎn)Ai到點(diǎn)Bi的單位向量
vAi、vBi——點(diǎn)Ai、Bi在靜坐標(biāo)系中的速度
那天晚上兩人睡在了一起,好友抱著女人跟她說,有些時(shí)候咱們女人是最傻的,被騙了還不醒悟,被拋棄了還懷念人家過去的好,想一想真的很傻。
(17)
(18)
1.6 被動(dòng)桿BiCi速度和加速度
同樣,桿BiCi質(zhì)心的速度和角速度為
(19)
(20)
對(duì)式(19)、(20)求導(dǎo),可得桿BiCi質(zhì)心加速度和角加速度為
對(duì)于”羅森塔爾效應(yīng)”,大家是熟知的,這就要求我們教師在教學(xué)中要幫助學(xué)生樹立學(xué)習(xí)信心。學(xué)生的學(xué)習(xí)信心不足,懷疑自己的學(xué)習(xí)潛力,自卑心強(qiáng),就不可能對(duì)學(xué)習(xí)產(chǎn)生興趣。如果有了教師的信任和愛護(hù),學(xué)生則會(huì)變得更加自信、自強(qiáng)。對(duì)學(xué)習(xí)信心不足的學(xué)生,教師要善于發(fā)現(xiàn)和利用他們的閃光點(diǎn),及時(shí)表?yè)P(yáng)和鼓勵(lì),以增強(qiáng)其信心。學(xué)生經(jīng)常受到激勵(lì)和鼓舞會(huì)產(chǎn)生愉悅的心理體驗(yàn),從而產(chǎn)生濃郁的學(xué)習(xí)興趣。
(21)
(22)
2 并聯(lián)機(jī)構(gòu)動(dòng)力學(xué)模型
采用牛頓-歐拉法建立機(jī)構(gòu)的動(dòng)力學(xué)模型,分別以運(yùn)動(dòng)構(gòu)件和動(dòng)平臺(tái)為研究對(duì)象進(jìn)行受力分析。為簡(jiǎn)化模型做如下假設(shè):①構(gòu)件及動(dòng)平臺(tái)為質(zhì)量集中分布的剛體單元,構(gòu)件幾何中心與其重心重合,重力矢量在z軸負(fù)方向。②動(dòng)平臺(tái)所受外載荷簡(jiǎn)化為過其幾何中心的力Fex和力矩Mex。③與機(jī)架相連的移動(dòng)副為驅(qū)動(dòng)副,采用伺服電機(jī)+減速器+滾珠絲桿副的驅(qū)動(dòng)形式。
(5)隨著不斷巡檢數(shù)據(jù)的增加,能夠具備自動(dòng)更新設(shè)備歷史狀態(tài)信息庫(kù),更新狀態(tài)模型,動(dòng)態(tài)、靈活地調(diào)整和控制設(shè)備運(yùn)行狀態(tài),使系統(tǒng)狀態(tài)往有利方向發(fā)展。
2.1 子結(jié)構(gòu)1中各運(yùn)動(dòng)構(gòu)件
子結(jié)構(gòu)1由3條相同的CRR支鏈并聯(lián)而成,應(yīng)分別進(jìn)行受力分析。
2.1.1驅(qū)動(dòng)桿AiBi受力分析
驅(qū)動(dòng)桿AiBi(i=1,2,3)兩端分別通過圓柱副和轉(zhuǎn)動(dòng)副與定平臺(tái) (包括驅(qū)動(dòng)裝置) 和被動(dòng)桿BiCi相連,受力如圖3所示。
在圓柱副處驅(qū)動(dòng)桿受力Fai=(Faix,Faiy,Faiz)和力矩Mai=(Maix,Maiy,Maiz)作用,在轉(zhuǎn)動(dòng)副處受桿BiCi的約束力Fbi=(Fbix,Fbiy,Fbiz)和約束力矩Mbi=(Mbix,Mbiy,Mbiz),以及連架桿自重mi1g。其中,Fa1x、Fa2y、Fa3z分別為作用在支鏈1、2、3絲桿螺母上的主驅(qū)動(dòng)力,記為τ1、τ2、τ3。又根據(jù)支鏈布局,約束力矩可分別記為Ma1=(0,Ma1y,Ma1z)、Ma2=(Ma2x,0,Ma2z)、Ma3=(Ma3x,Ma3y,0)、Mb1=(0,Mb1y,Mb1z)、Mb2=(Mb2x,0,Mb2z)、Mb3=(Mb3x,Mb3y,0)。
則桿AiBi力平衡方程為
(23)
式中O——零矩陣
在固定坐標(biāo)系下對(duì)桿AiBi質(zhì)心取矩,得力矩平衡方程為
(24)
其中
仔豬白痢的病理變化主要表現(xiàn)在可視粘膜蒼白、消瘦、腸粘膜充血、輕度出血、腸壁薄且失去彈性、腸內(nèi)容物增多呈泡沫樣,腸系膜淋巴結(jié)腫大及充血。
Mi1=Ii1εi1+ωi1Ii1ωi1
式中Mi1——桿AiBi慣性力矩
Ii1——桿AiBi相對(duì)于質(zhì)心的轉(zhuǎn)動(dòng)慣量
ri1、ri2——點(diǎn)Ai、點(diǎn)Bi相對(duì)桿質(zhì)心的位置矢量
其中
2.1.2被動(dòng)桿BiCi受力分析
這三個(gè)環(huán)節(jié)從整體上決定了一個(gè)企業(yè)的品牌能不能做起來,能不能被公眾認(rèn)可,而企業(yè)品牌建設(shè)的長(zhǎng)期規(guī)劃也是圍繞著這三個(gè)環(huán)節(jié)展開和操作的。在這個(gè)過程中,品牌價(jià)值的評(píng)估是企業(yè)有條不紊地進(jìn)行品牌建設(shè)的重要一環(huán),可以幫助企業(yè)實(shí)時(shí)掌握自身品牌建設(shè)的效果,及時(shí)做出分析與戰(zhàn)略調(diào)整。
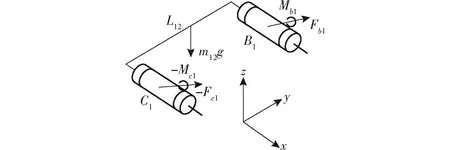
圖4 桿件BiCi的受力分析
則桿BiCi力平衡方程為
磷石膏是磷化工企業(yè)采用濕法工藝,在磷酸生產(chǎn)中用硫酸處理磷礦時(shí)產(chǎn)生的固體廢渣,其主要成分為二水硫酸鈣,此外還含有未分解完的磷礦、氟化物、磷酸、有機(jī)質(zhì)、酸不溶物、鐵鋁化合物等雜質(zhì)。[1]通常情況下,濕法生產(chǎn)1t磷酸就會(huì)副產(chǎn)4.5-5.5t磷石膏。[2]
(25)
對(duì)桿BiCi質(zhì)心取矩,得力矩平衡方程
(26)
其中
Mi2=Ii2εi2+ωi2Ii2ωi2
式中Mi2——桿BiCi慣性力矩
Ii2——桿BiCi相對(duì)于質(zhì)心的轉(zhuǎn)動(dòng)慣量

2.1.3中間平臺(tái)受力分析
中間平臺(tái)受力包括3個(gè)轉(zhuǎn)動(dòng)副Ri3處的反力-Fci和約束反力矩-Mci,以及轉(zhuǎn)動(dòng)副RD處的約束力Ft1=(Ft1x,Ft1y,Ft1z)和約束力矩Mt1=(Mt1x,Mt1y,0),以及自身重力m1g,見圖5。
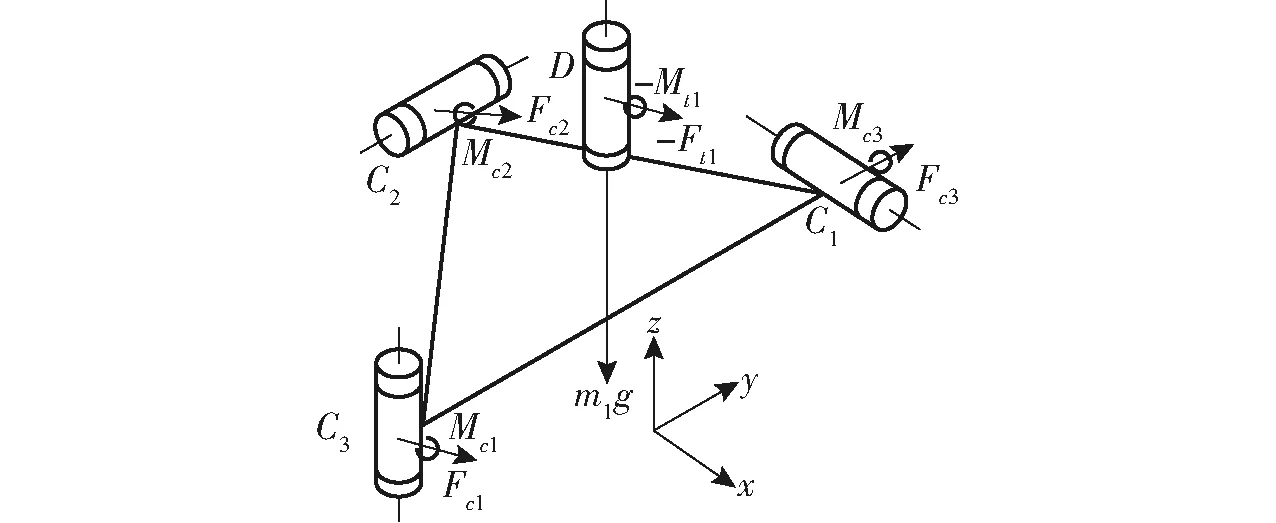
圖5 中間平臺(tái)受力分析
中間平臺(tái)力平衡方程為
(27)
由于中間平臺(tái)僅有移動(dòng),只產(chǎn)生慣性力,在定坐標(biāo)系下對(duì)質(zhì)心的力矩平衡方程為
(28)
式中rci——點(diǎn)Ci相對(duì)于中間平臺(tái)質(zhì)心點(diǎn)D的位置矢量
2.2 子結(jié)構(gòu)2運(yùn)動(dòng)構(gòu)件
2.2.1驅(qū)動(dòng)桿A4B4受力分析
驅(qū)動(dòng)桿A4B4在圓柱副C41處受力Fa4=(Fa4x,Fa4y,Fa4z)和約束力矩Ma4=(Ma4x,0,Ma4z);轉(zhuǎn)動(dòng)副R42處受約束力Fb4=(Fb4x,Fb4y,Fb4z)和約束力矩Mb4=(0,Mb4y,Mb4z),以及自重m41g,如圖6所示。其中,Fa4y為支鏈驅(qū)動(dòng)力,記為τ4。
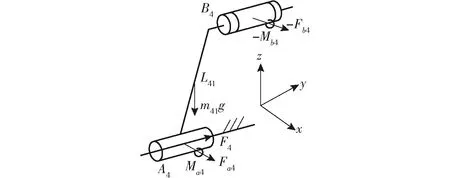
圖6 驅(qū)動(dòng)桿A4B4受力分析
則桿A4B4的力平衡方程為
(29)
對(duì)桿A4B4質(zhì)心取矩,得力矩平衡方程為
(30)
其中
M41=I41ε41+ω41I41ω41
式中M41——桿A4B4慣性力矩
I41——桿A4B4相對(duì)于質(zhì)心的轉(zhuǎn)動(dòng)慣量
r41、r42——點(diǎn)A4、點(diǎn)B4相對(duì)質(zhì)心位置矢量
桿BiCi(i=1,2,3)兩端均以轉(zhuǎn)動(dòng)副與驅(qū)動(dòng)桿AiBi和中間平臺(tái)連接,受到驅(qū)動(dòng)桿的反力-Fbi和反力矩-Mbi,受到中間平臺(tái)的約束力Fci=(Fcix,Fciy,Fciz)和約束力矩Mci(支鏈1、2、3分別記為Mc1=(0,Mc1y,Mc1z)、Mc2=(Mc2x,0,Mc2z)、Mc3=(Mc3x,Mc3y,0)),以及桿件自重mi2g,受力如圖4所示。
2.2.2被動(dòng)桿B4C4受力分析
被動(dòng)桿B4C4在虎克鉸U43處受動(dòng)平臺(tái)的約束力Ft2=(Ft2x,Ft2y,Ft2z)和約束力矩Mt2=(Mt2x,0,0),在轉(zhuǎn)動(dòng)副R42處受反力-Fb4和約束反力矩-Mb4,以及桿件自重m42g,如圖7所示。
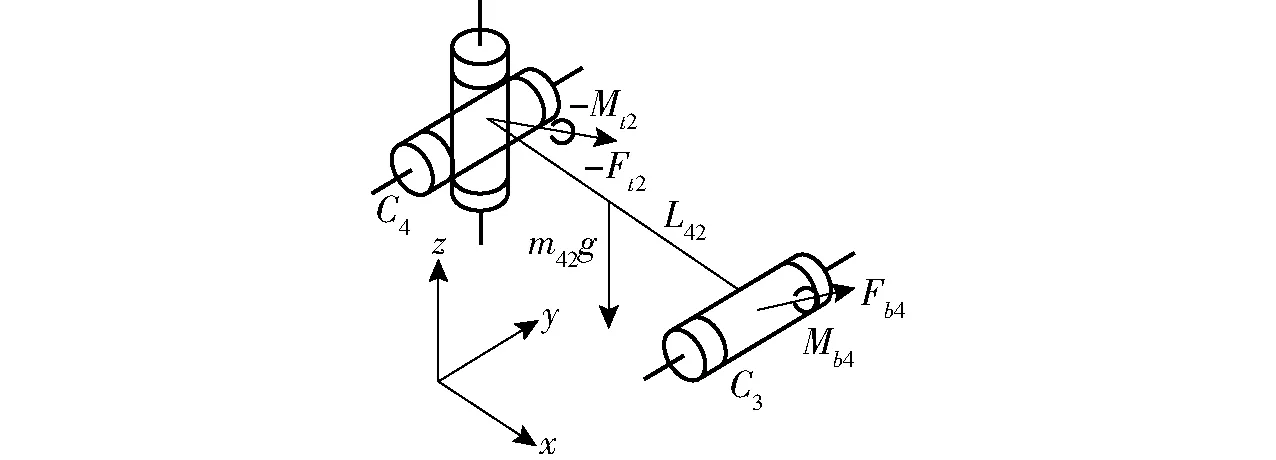
圖7 連桿B4C4的受力分析
則桿B4C4的力平衡方程為
如果短期燃油修正值在圖2所示“3”區(qū)域(-35%~-60%)或在“4”區(qū)域(+35%~+60%),說明發(fā)動(dòng)機(jī)的反饋控制已經(jīng)無法修正混合汽的狀態(tài),此時(shí)發(fā)動(dòng)機(jī)會(huì)激活故障碼P0172(混合汽過濃)或故障碼(P0171),同時(shí)發(fā)動(dòng)機(jī)故障指示燈點(diǎn)亮。
(31)
對(duì)桿B4C4質(zhì)心取矩,得力矩平衡方程
(32)
——堅(jiān)持以人民為中心的發(fā)展思想,始終把維護(hù)人民群眾資源權(quán)益作為各項(xiàng)工作的出發(fā)點(diǎn)和落腳點(diǎn),積極推動(dòng)資源為民惠民利民,不斷健全完善自然資源社會(huì)服務(wù)體系,人民群眾的幸福感獲得感持續(xù)增強(qiáng)。
對(duì)式(15)、(16)求導(dǎo),可得桿AiBi質(zhì)心加速度和角加速度為
M42=I42ε42+ω42I42ω42
式中M42——桿B4C4慣性力矩
I42——桿B4C4相對(duì)于質(zhì)心的轉(zhuǎn)動(dòng)慣量
2017年9月23日,在當(dāng)?shù)亟?jīng)銷商的配合下,召開了農(nóng)戶觀摩和部分零售商觀摩會(huì)暨訂貨會(huì),成功銷售云天化葡萄套餐肥24套。為云天化紅寶石套餐肥在山東省招遠(yuǎn)市紅寶石葡萄作物上的推廣打下了堅(jiān)實(shí)的基礎(chǔ)。
r43、r44——點(diǎn)B4、點(diǎn)C4相對(duì)質(zhì)心位置矢量
2.3 動(dòng)平臺(tái)受力分析
動(dòng)平臺(tái)兩側(cè)分別通過RD和U43與支鏈相連,受力如圖8所示,包括轉(zhuǎn)動(dòng)副約束反力-Ft1和約束反力矩-Mt1;約束反力-Ft2和約束反力矩-Mt2,外力Fe=(Fex,Fey,Fez)、外力矩Me=(Mex,Mey,Mez);以及自身重力mg。
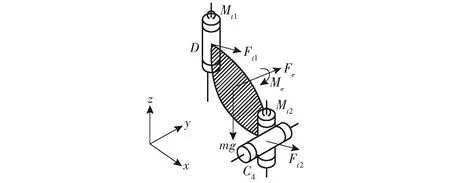
圖8 動(dòng)平臺(tái)受力分析
則動(dòng)平臺(tái)力/力矩平衡方程為
關(guān)于“音樂產(chǎn)業(yè)”的興起,可追溯到20世紀(jì)80年代左右。隨改革開放的深入,音樂形式不斷豐富,音樂人才隊(duì)伍逐漸壯大。以磁帶為主的唱片銷量突飛猛進(jìn),得到空前發(fā)展。20世紀(jì)末,互聯(lián)網(wǎng)的普及使數(shù)字音樂崛地而起,并占據(jù)音樂產(chǎn)業(yè)的核心地位。此外,還延伸出許多相關(guān)產(chǎn)業(yè),如音樂教育業(yè)、音樂生產(chǎn)業(yè)等。音樂產(chǎn)業(yè)不僅為經(jīng)濟(jì)和文化創(chuàng)造出財(cái)富,而且極大擴(kuò)展了文化產(chǎn)業(yè)的領(lǐng)域。
(33)
(34)
其中
M=Iε+ωIω
式中M——?jiǎng)悠脚_(tái)慣性力矩
I——?jiǎng)悠脚_(tái)相對(duì)于質(zhì)心的轉(zhuǎn)動(dòng)慣量
rD、rC4——點(diǎn)D和點(diǎn)C4相對(duì)質(zhì)心位置矢量
2.4 并聯(lián)機(jī)構(gòu)動(dòng)力學(xué)方程
聯(lián)立式 (23)~(34),共60個(gè)方程,60個(gè)未知量,方程可解。通過消元法消除內(nèi)力/力矩,可得到機(jī)構(gòu)驅(qū)動(dòng)力的顯式表達(dá)式,并記驅(qū)動(dòng)力為
τ=[τ1τ2τ3τ4]T=[Fa1xFa2yFa3zFa4y]T
3 動(dòng)力學(xué)數(shù)值算例
3.1 動(dòng)力學(xué)模型仿真驗(yàn)證
由式(1)~(4)可得機(jī)構(gòu)位置反解方程
圖9 ADAMS仿真模型
機(jī)構(gòu)幾何和慣性參數(shù)如表1所示。為提高理論建模精度,桿件質(zhì)心、質(zhì)量和慣量均由仿真模型獲得;中間平臺(tái)和桿件采用碳纖維,驅(qū)動(dòng)系統(tǒng)采用1FL6024-2AF型直流伺服電機(jī)和1605型滾珠絲桿。
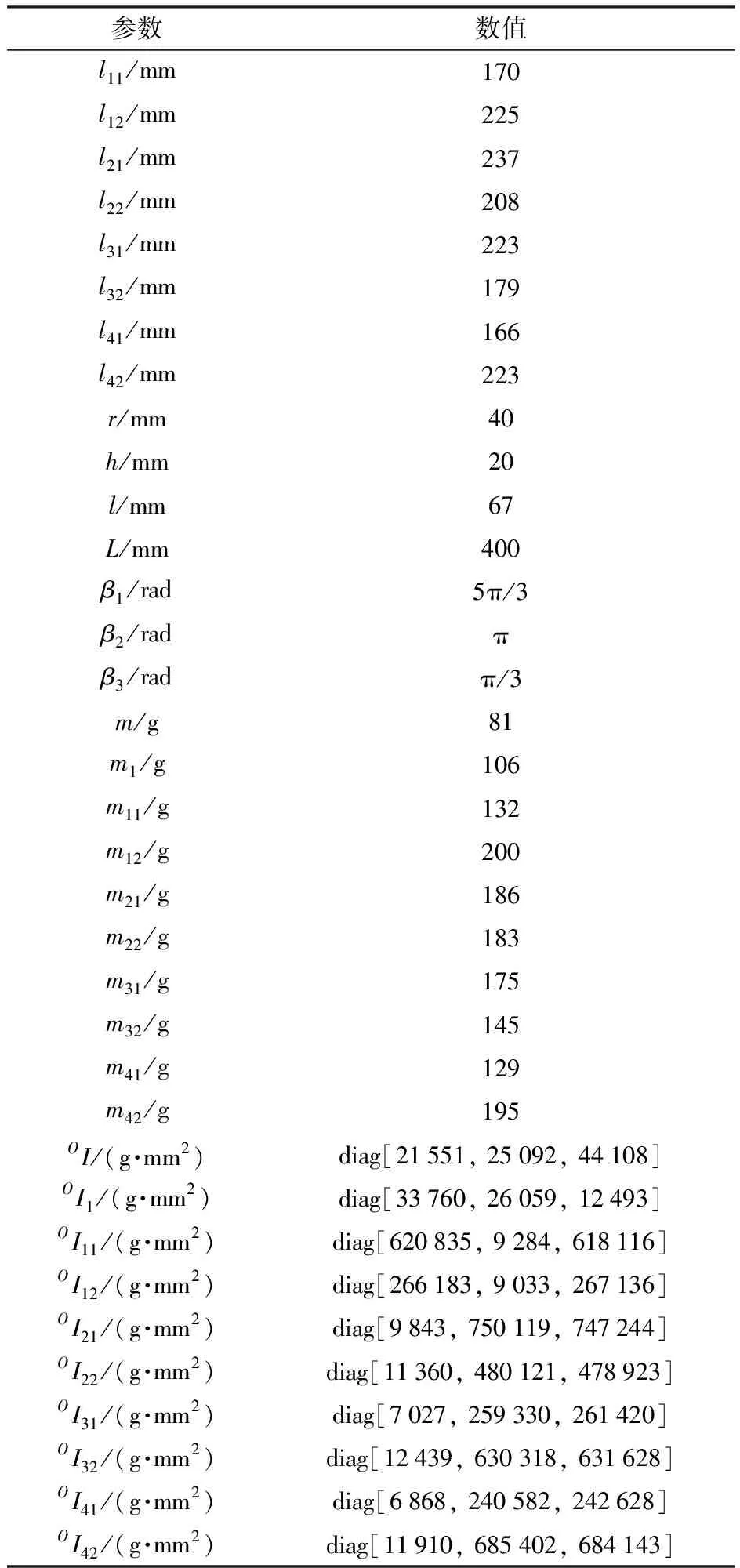
表1 機(jī)構(gòu)的幾何和物理參數(shù)
假設(shè)外負(fù)載為0,動(dòng)平臺(tái)姿態(tài)角不變?chǔ)?0°,初始運(yùn)動(dòng)條件下動(dòng)平臺(tái)質(zhì)心坐標(biāo)為(x0,y0,z0),給定動(dòng)平臺(tái)運(yùn)動(dòng)軌跡為
(35)
將表1中參數(shù)值代入動(dòng)力學(xué)方程,利用Matlab計(jì)算各支鏈驅(qū)動(dòng)力,計(jì)算結(jié)果與ADAMS仿真軟件按同樣軌跡仿真運(yùn)動(dòng)的結(jié)果進(jìn)行對(duì)比,結(jié)果如圖10 所示。由圖10c可知,理論值與仿真值基本吻合,4條驅(qū)動(dòng)力曲線的最大相對(duì)誤差分別為5.49%、2.51%、8.26%、0.35%,驗(yàn)證了動(dòng)力學(xué)模型正確性。

圖10 驅(qū)動(dòng)力計(jì)算結(jié)果
3.2 加速度對(duì)驅(qū)動(dòng)力的影響
對(duì)高速并聯(lián)機(jī)構(gòu),主要承受來自高速運(yùn)動(dòng)產(chǎn)生的慣性力,因此下面分析當(dāng)動(dòng)平臺(tái)最大加速度為3、7、11 m/s2時(shí)機(jī)構(gòu)驅(qū)動(dòng)力的變化,并假設(shè)外負(fù)載為0,動(dòng)平臺(tái)姿態(tài)角不變?chǔ)?0°,沿平行于坐標(biāo)軸方向和空間直線運(yùn)動(dòng)(4條軌跡如圖11所示),均采用五次多項(xiàng)式進(jìn)行路徑規(guī)劃,且初始位置的速度、加速度為0,驅(qū)動(dòng)力計(jì)算結(jié)果如圖12所示,每條支鏈驅(qū)動(dòng)力最大值見表2。
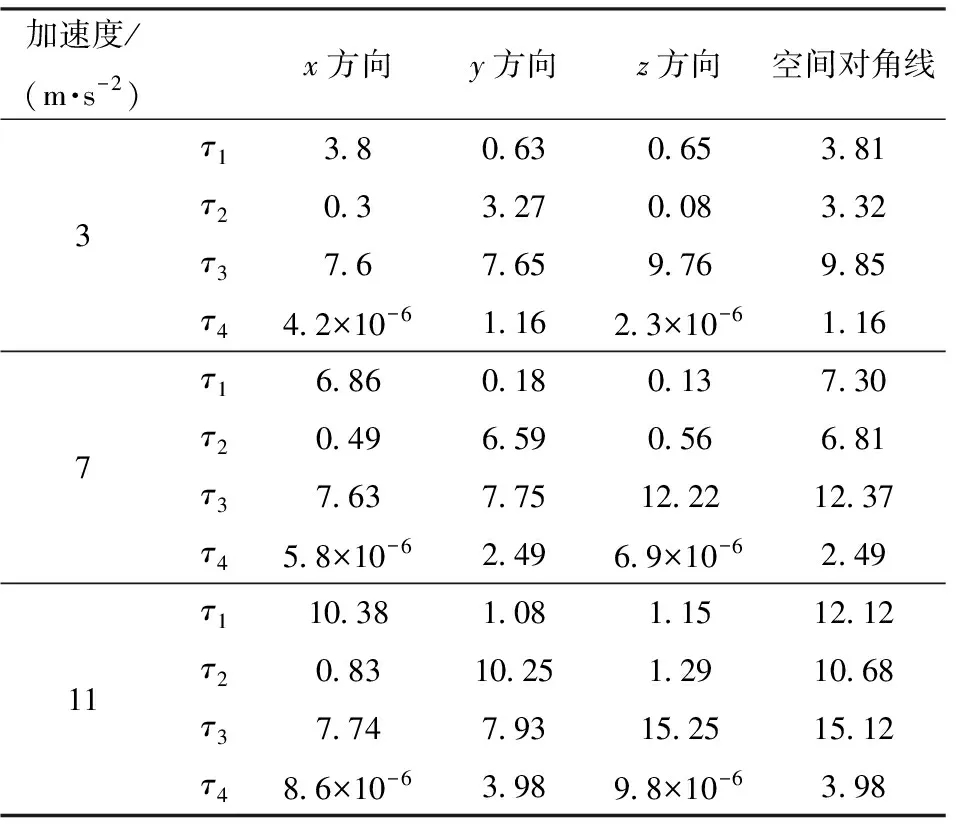
表2 不同加速度時(shí)的驅(qū)動(dòng)力
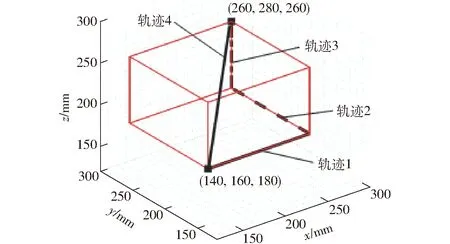
圖11 不同運(yùn)動(dòng)軌跡

圖12 加速度對(duì)驅(qū)動(dòng)力的影響
由于機(jī)構(gòu)沿x、y、z軸的運(yùn)動(dòng)分別由支鏈1、2、3的驅(qū)動(dòng)控制,因此當(dāng)動(dòng)平臺(tái)平行于x、y、z軸運(yùn)動(dòng)時(shí),支鏈1、2、3分別定義為驅(qū)動(dòng)支鏈,其余支鏈定義為相應(yīng)的鎖定支鏈。
由圖12和表2可得出:
(1)無論沿哪個(gè)方向運(yùn)動(dòng),驅(qū)動(dòng)力隨動(dòng)平臺(tái)加速度的增加而增加。特別是平行于坐標(biāo)軸方向運(yùn)動(dòng)時(shí),驅(qū)動(dòng)支鏈的驅(qū)動(dòng)力對(duì)加速度呈線性增加,但鎖定支鏈的驅(qū)動(dòng)力增加幅度較小。
(2)無論平面運(yùn)動(dòng)還是空間運(yùn)動(dòng),支鏈3的驅(qū)動(dòng)值都較大。沿x、y軸運(yùn)動(dòng)時(shí),支鏈3的驅(qū)動(dòng)力接近甚至超過驅(qū)動(dòng)支鏈的驅(qū)動(dòng)力,特別是低加速度時(shí)更為明顯,因此機(jī)構(gòu)結(jié)構(gòu)設(shè)計(jì)時(shí)支鏈3是關(guān)鍵。
(3)動(dòng)平臺(tái)做定姿態(tài)運(yùn)動(dòng)時(shí),支鏈4僅與y軸方向的運(yùn)動(dòng)有關(guān),當(dāng)動(dòng)平臺(tái)沿x、z軸運(yùn)動(dòng)時(shí),支鏈4的驅(qū)動(dòng)力接近0。
(4)支鏈間驅(qū)動(dòng)力存在耦合。相同的加速度條件下,空間運(yùn)動(dòng)時(shí)的驅(qū)動(dòng)力大于單軸運(yùn)動(dòng)時(shí)的驅(qū)動(dòng)力,且加速度越大,差值越明顯,這也證明了慣量對(duì)機(jī)構(gòu)動(dòng)力學(xué)性能有較大影響。
3.3 動(dòng)平臺(tái)姿態(tài)角對(duì)驅(qū)動(dòng)力的影響
為研究姿態(tài)角對(duì)機(jī)構(gòu)驅(qū)動(dòng)力的影響,假設(shè)動(dòng)平臺(tái)中心點(diǎn)D按圖11中軌跡4運(yùn)動(dòng),姿態(tài)角分別保持為φ=±60°、±30°、0°時(shí),計(jì)算支鏈的驅(qū)動(dòng)力,結(jié)果如圖13所示。由圖13可得:①當(dāng)運(yùn)動(dòng)軌跡相同時(shí),動(dòng)平臺(tái)姿態(tài)角的變化對(duì)驅(qū)動(dòng)力τ1、τ3沒有影響,對(duì)τ2、τ4有影響,且影響規(guī)律相同。②當(dāng)姿態(tài)角為-60°時(shí),所需驅(qū)動(dòng)力最小,可以將此姿態(tài)設(shè)置為機(jī)構(gòu)的初始姿態(tài)。
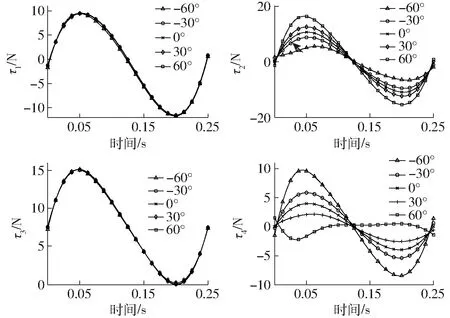
圖13 姿態(tài)角φ對(duì)驅(qū)動(dòng)力的影響
4 動(dòng)力學(xué)耦合特性分析
并聯(lián)機(jī)構(gòu)笛卡爾空間逆動(dòng)力學(xué)模型可表示為
(36)
式中τ——主動(dòng)關(guān)節(jié)的驅(qū)動(dòng)力
MX——機(jī)構(gòu)廣義坐標(biāo)下的慣性矩陣
F——外力
對(duì)高加減速機(jī)構(gòu)而言,與加速度有關(guān)的項(xiàng)MX將起主導(dǎo)作用。對(duì)(3CRR/R)&CRU并聯(lián)機(jī)構(gòu)而言,廣義坐標(biāo)下的慣性矩陣為
(37)
式中M——?jiǎng)悠脚_(tái)在廣義坐標(biāo)下的慣性矩陣
M1——中間平臺(tái)廣義坐標(biāo)下的慣性矩陣
Mi1——驅(qū)動(dòng)桿在廣義坐標(biāo)下的慣性矩陣
Mi2——被動(dòng)桿在廣義坐標(biāo)下的慣性矩陣
為研究并聯(lián)機(jī)構(gòu)主動(dòng)支鏈間的動(dòng)力學(xué)耦合特性,需要建立其關(guān)節(jié)空間的驅(qū)動(dòng)力模型。由于機(jī)構(gòu)動(dòng)能既能在關(guān)節(jié)空間下表示,又能在廣義坐標(biāo)下表示,則有
(38)
(39)
將式(39)代入式(38),可得到笛卡爾坐標(biāo)下的慣量矩陣MX與關(guān)節(jié)空間的慣量矩陣Mq之間的關(guān)系為[22]
Mq=(J-1)TMX(J-1)
(40)
根據(jù)文獻(xiàn)[14],可計(jì)算出機(jī)構(gòu)每個(gè)構(gòu)件j在定坐標(biāo)系下的廣義慣量矩陣為
(41)
式中m——構(gòu)件j質(zhì)量
R——構(gòu)件j局部坐標(biāo)系相對(duì)于定坐標(biāo)系的旋轉(zhuǎn)變換矩陣
I——單位矩陣
M——構(gòu)件j局部坐標(biāo)下的慣性矩陣
機(jī)構(gòu)關(guān)節(jié)空間的慣性矩陣Mq第i行除對(duì)角元素外的其他元素Mik(i≠k)為第i支鏈對(duì)其余支鏈的耦合慣量,會(huì)產(chǎn)生耦合力矩從而影響支鏈的動(dòng)態(tài)性能。基于此,文獻(xiàn)[25]提出了并聯(lián)機(jī)構(gòu)支鏈間的動(dòng)力學(xué)耦合強(qiáng)度指標(biāo)DCIi,計(jì)算式為
(42)
其中
式中,δDi為耦合強(qiáng)度系數(shù),是慣性矩陣Mq的非對(duì)角項(xiàng)相對(duì)對(duì)角項(xiàng)的占比,值越小表明機(jī)構(gòu)受到的耦合力矩越小。耦合強(qiáng)度指標(biāo)DCIi是對(duì)δDi的進(jìn)一步處理,使其在[0,1]范圍內(nèi)變化。該值越接近1,動(dòng)力學(xué)耦合越嚴(yán)重,反之,動(dòng)力學(xué)耦合強(qiáng)度越小。由式(42)可知,DCIi為機(jī)構(gòu)位姿的函數(shù)。
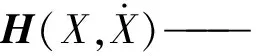
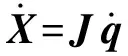
將表1所示參數(shù)依次代入式(41)、(37)、(40)、(42),可得第i條支鏈的耦合強(qiáng)度指標(biāo)DCIi在工作空間的變化規(guī)律。為便于性能比較,采用同樣的方法,對(duì)結(jié)構(gòu)降耦前的Quadrupteron機(jī)構(gòu)[1]的耦合強(qiáng)度指標(biāo)進(jìn)行計(jì)算。圖14、15分別為兩個(gè)機(jī)構(gòu)的DCI在工作空間內(nèi)的分布,DCI最大值見表3。

表3 機(jī)構(gòu)DCI的最大值
圖14 降耦后機(jī)構(gòu)(3CRR/R)&CRU的DCI
圖15 降耦前機(jī)構(gòu)Quadrupteron的DCI
由圖14、15以及表3可知:
(1)對(duì)所有支鏈而言,(3CRR/R)&CRU 降耦機(jī)構(gòu)的耦合強(qiáng)度明顯低于降耦之前的Quadrupteron機(jī)構(gòu)。DCI1的最大值從0.7降到0.22,DCI2最大值從0.6降到0.26,DCI3的最大值從0.4降到0.24,DCI4的最大值從0.86降到0.64。
(2)運(yùn)動(dòng)學(xué)解耦可降低機(jī)構(gòu)慣量耦合強(qiáng)度。由文獻(xiàn)[26]可知,降耦前機(jī)構(gòu)僅z向輸出完全解耦,其余輸出為部分解耦,因此機(jī)構(gòu)DCI3明顯低于DCI1、DCI2和DCI4。而降耦后機(jī)構(gòu)的3個(gè)移動(dòng)輸出完全解耦,轉(zhuǎn)動(dòng)部分解耦,輸出與支鏈2、4的驅(qū)動(dòng)相關(guān),因此降耦后機(jī)構(gòu)的DCI4高于DCI1、DCI2和DCI3。
為進(jìn)一步分析降耦之后機(jī)構(gòu)DCI的分布規(guī)律,繪制z=260 mm時(shí)DCIi在xy平面內(nèi)的等高線圖,結(jié)果如圖16所示。由圖16可知:

圖16 DCI分布(z=260 mm)
(1)降耦機(jī)構(gòu)(3CRR/R)&CRU所有支鏈的DCI值均很小,DCI1、DCI2和DCI3均低于0.26,說明支鏈間耦合強(qiáng)度較弱,尤其工作空間中心位置的DCI值達(dá)最小。
(2)整個(gè)xy平面內(nèi)DCI值的變化幅度較小,說明機(jī)構(gòu)具有較好的各向同性性能,對(duì)高速高精等工程應(yīng)用更為有利。
5 結(jié)論
(1)考慮重力、外負(fù)載,利用牛頓-歐拉法建立了(3CRR/R)&CRU并聯(lián)機(jī)構(gòu)的動(dòng)力學(xué)模型,并用ADAMS進(jìn)行了仿真驗(yàn)證。
(2)基于所建動(dòng)力學(xué)模型分析了加速度和動(dòng)平臺(tái)姿態(tài)角對(duì)機(jī)構(gòu)驅(qū)動(dòng)力的影響,為機(jī)構(gòu)軌跡規(guī)劃提供了理論依據(jù)。
(3)建立了慣量耦合強(qiáng)度指標(biāo),分析了其在工作空間內(nèi)的分布。結(jié)果表明,結(jié)構(gòu)降耦明顯降低了機(jī)構(gòu)支鏈間的耦合強(qiáng)度,提高了機(jī)構(gòu)的動(dòng)態(tài)性能。
(4)降耦之后的機(jī)構(gòu),不僅慣量耦合強(qiáng)度弱,而且整個(gè)工作空間內(nèi)耦合強(qiáng)度變化較小,提升了機(jī)構(gòu)的各向同性性能。
