基于AM-BiLSTM模型的塊石回填土區盾構姿態預測研究
2023-09-25 13:10:52汪來王樹英潘秋景肖超
鐵道科學與工程學報 2023年8期
關鍵詞:模型
汪來,王樹英, ,潘秋景,肖超
(1.中南大學 土木工程學院,湖南 長沙 410075;2.中南大學 隧地工程研究中心,湖南 長沙 410075;3.中南大學 重載鐵路工程結構教育部重點實驗室,湖南 長沙 410075;4.中建五局土木工程有限公司,湖南 長沙 410004)
山地城市地形起伏較大,在早期城區道路改造過程中,往往對溝谷區域采取回填處理,回填材料以城市建設中開挖土石方為主,塊石含量大,由此出現較多大范圍塊石回填土區[1]。這些塊石回填土層均勻性差、深度變化大、地層分布疏松多孔、土體變形模量低、抗剪強度較弱、遇水易發生濕陷,盾構機在穿越此類地層時,工作面穩定性差且不適合建立氣壓,姿態控制難度較大,容易出現姿態不良現象[1-2],導致千斤頂推力分布不均,造成管片破損、錯臺等問題,影響管片耐久性和安全性,同時還會造成地層損失過大從而引起較大地表沉降[1,3-5]。目前,國內對盾構姿態控制主要依靠盾構司機自身經驗,在掘進過程中,盾構司機根據激光自動導向系統顯示的數據,結合自身操作經驗,人為調整各分區千斤頂的推力及刀盤轉向等來調整盾構姿態,主觀性大,控制質量難以保證,另一方面,隨著盾構法向大深度、大斷面、長距離發展,盾構施工對施工環境及勞動條件、施工質量提出了越來越高的要求。為了降低施工風險、解決施工經驗化等問題,有必要對盾構姿態進行實時預測,根據盾構姿態預測結果及時調整掘進參數,保證盾構掘進軸線與設計軸線一致,提高盾構施工質量[6]。盾構姿態理論模型可在一定程度上揭示盾構掘進過程中的受力機制,國內外許多學者對此進行了研究。SUGIMOTO 等[7]對作用于盾構機上的荷載進行分析,建立考慮盾構姿態的力學模型,在砂性和黏性土地層的直線和曲線線形進行盾構行為模擬,將模擬結果與經驗值和理論計算結果進行比較,結果表明所提出的力學模型可以很好地預測盾構姿態。沈翔等[8]基于彈性地基梁理論,建立盾構俯仰角的理論計算模型,對模型中的關鍵參數進行分析,結果表明:盾構豎向位移隨垂直基床系數的增大逐漸趨于零,開挖面上的硬土地層高度會嚴重影響盾構姿態的調整。黃威等[9]提出了盾構水平姿態的二維力學分析模型,將理論計算值與現場實測數據進行對比,結果表明:提出的理論公式可以根據盾構推力大小和土體特性合理預測盾構姿態。劉成等[10]基于溫克爾地基模型,提出通過改變各分區油缸推力來提供糾偏力矩的方法,推導各分區油缸推力變化量與盾構姿態之間的計算公式,建立了針對水平方向上的盾構姿態控制模型。實際施工時,盾構與周圍土層相互作用機理復雜,刀盤轉速、分區油缸壓力、土倉壓力等一系列因素會以非線性方式相互作用,影響盾構姿態;另一方面,理論模型通常需要地質參數和掘進參數,一般情況下,地質參數是在施工前通過勘察鉆孔獲取的,容易導致地質信息與參數不準確。因此,理論模型難以直接準確應用于盾構姿態的實時預測。近幾十年來,隨著計算科學的發展,機器學習(ML)方法越來越受歡迎。與理論模型相比,機器學習方法不需要大量的地質材料參數建模和工程背景經驗,同時能夠探索各潛在影響因素之間的復雜關系,因此被廣泛應用于隧道工程相關問題的研究。丁海英[11]提出一種基于反向傳播神經網絡(BPNN)的盾構機姿態控制參數補償方法,對盾構機姿態控制參數進行預測,并借助專家知識系統對推進系統姿態進行調整。張愛軍[12]運用BPNN模型研究盾構掘進參數對盾構隧道軸線偏移量的影響,結果顯示:盾構軸線偏移量隨上下油缸推力差、盾構總推力和隧道埋深的增大而增大,隨土巖掘進面占比的增大先減小后增大。ZHOU 等[13]提出一種基于小波變換(WT)、卷積神經網絡(CNN)和長短時記憶網絡(LSTM)的盾構姿態預測模型,利用武漢長江三陽路越江隧道盾構數據對模型進行驗證,結果表明:該模型在預測精度上優于其他3種相似模型,可為盾構掘進中姿態和位置的調整提供決策支持。吳惠明等[14]利用支持向量回歸(SVR)模型對盾構姿態進行預測,通過優化施工參數建立適合于盾構姿態預測的地層-施工-姿態數據庫,成功對80 d內共235環的盾構姿態進行預測。胡長明等[15]提出一種基于BPNN和SVR的盾構豎向姿態組合預測模型,將其應用至成都地鐵8號線某盾構區間中,研究結果表明:盾構姿態組合預測模型的泛化能力更強、準確性更高。岳琳輝等[16]提出一種基于最優組合賦權的經驗模態分解-門循環神經網絡(EMD-GRU)盾構豎向姿態預測方法,依托昆明地鐵5號線盾構項目加以應用,并與GRU,SVR 和BPNN 的預測結果進行對比,結果表明:構建的EMD-GRU預測模型具有較高的預測精度和泛化能力。盾構姿態隨掘進變化過程作為典型的時間序列問題,其模型預測性能依賴于數據在時間上的先后順序[17],既有研究中主要采用較傳統的機器學習模型,未能充分提取多元時間序列的深層特征信息,且多集中于對盾構姿態參數的預測,對于如何將盾構姿態的事前預測與現場盾構姿態調整的工程措施結合起來,目前研究較少。本文依托重慶地鐵5號線北延伸段中央公園西站—椿萱大道站區間(以下簡稱中—椿區間)穿越塊石回填土層工程實例,建立基于注意力機制的雙向長短時記憶神經網絡(AM-BiLSTM),對盾構姿態進行預測,結合盾構姿態調整的工程措施,提出事前預測結合事后調整的盾構姿態控制方式,研究成果可為今后類似塊石回填土層盾構姿態控制提供一定的借鑒和參考。
1 理論模型
1.1 雙向長短時記憶神經網絡
對于時間序列數據,當前狀態與先前狀態具有較大的相關性,而傳統人工神經網絡(ANN)要求輸入(輸出)變量之間必須相互獨立,因此,傳統ANN 無法處理時間序列預測問題。循環神經網絡(RNN)是ANN 的擴展,通過引入門控機制存儲先前輸入并利用先前輸入的順序信息,可以對時間序列中觀測值的相關性進行建模,處理時間序列預測問題,然而,RNN 在時間序列數據訓練過程中容易出現梯度消失問題,使得RNN 難以捕捉到時間序列數據中的長期依賴關系。長短時記憶神經網絡(LSTM)具有強大的非線性擬合能力和記憶特性,是序列數據建模中使用最廣泛的循環結構之一,由HOCHREITER 等[18]在RNN 的基礎上提出,通過將RNN 中的隱含層替換為存儲塊,并引入具有記憶時間狀態的自連接存儲單元和用于控制信息流的自適應門單元,可以處理短期和長期時間序列內的相關性,對復雜的非線性時間序列數據進行建模,同時有效解決模型訓練過程中的梯度消失問題,提高神經網絡泛化性能。
LSTM 中時間序列信息的傳輸是單向的,為充分考慮過去和未來序列信息的時間依賴性,GRAVES 等[19]提出雙向長短時記憶神經網絡(BiLSTM),BiLSTM 由2個相反方向LSTM 層組成,一層按照時間序列的正向對序列特征進行編碼,另一層按照時間序列的反向對序列特征進行編碼,可以利用信息序列的前向和后向順序更精確地學習信息,改善學習的長期依賴性,從而提高模型的準確性,因此特別適合處理時間序列數據[20]。
1.2 注意力機制
為了提高人工神經網絡的預測性能,TREISMAN 等[21]提出了一種應用于人工神經網絡的注意力機制(AM)。通過計算注意力的概率分布,從大量信息中選擇關鍵信息,去除冗余數據,可以避免模型過擬合,提高模型的計算效率和準確性。注意力層的本質是對輸入進行加權求和,其計算公式如式(1)所示:
式中:K,Q和V分別來自同一輸入的不同轉換,通過計算Q和K的相關矩陣,并將其與V相乘以捕捉時間序列的長距離依賴關系;dk為比例因子。
2 工程實例
2.1 工程概況
重慶軌道交通5號線北延伸段工程位于重慶市渝北區中央公園片區,現場區域周邊建、構筑物多為城市道路及在建小區,軌道雙線與城市道路秋成大道大致平行,地面高程299.5~310.5 m,相對高差約11 m,地形較平坦,地面坡角1°~8°,局部存在坡度大于25°的斜坡。
中—椿區間掘進長度為1 110.711 m,區間最小曲線半徑2 000 m,最大縱坡38.07‰,長270 m,占比24.21%。沿線出露的地層由上而下依次可分為塊石回填土層、泥質砂巖和砂巖,下穿塊石回填土區間地質剖面圖如圖1所示。

圖1 中—椿區間穿越塊石回填土區段地質剖面圖Fig.1 Geological profile of Zhong—Chun section crossing the soil-rock mixture backfill area
區間約401 m 位于塊石回填土地層中,采用復合式TBM 進行施工,從始發至回填土段結束采用土壓平衡TBM 模式,在其他地層掘進時采用單護盾TBM 模式。復合式TBM 的刀盤開挖直徑為6 885 mm,主機最大外徑為6 830 mm,推進系統采用30 根推進油缸,最大總推進力43 600 kN,最大行程2 300 mm,盾體帶鉸接,鉸接油缸的作用是為了適應盾構蛇形,特別是曲線段盾構掘進,鉸接型式為被動鉸接,最大鉸接行程150 mm。
區間塊石回填土地層以素填土為主,素填土為雜色,以黏性土夾砂巖、泥巖塊(碎)石為主,骨架顆粒粒徑以20~600 mm 為主,局部大于1 m,含量一般為20%~45%,在厚度較大的地段中下部塊(碎)石含量顯著增高,局部可達到50%~60%,粒徑也有所增大,局部存在架空現象,主要呈松散~稍密狀,稍濕,厚度0.5~44.5 m。沿線填土堆填年限一般為1~3年。
2.2 數據分析
參考既有文獻[12,15,22]中樣本數據量的選擇,結合塊石回填土區段長度,收集盾構機掘進1環~200環的數據作為樣本,每環數據包括14項參數,數據來源于重慶軌道交通5號線北延伸段中—椿區間右線17工區,由實時測量系統獲取。
影響盾構姿態的因素一般可分為:隧道幾何參數、地層參數和盾構機掘進參數[22]。考慮到隧道具有恒定的直徑并且由相同類型的土壓平衡盾構機開挖,隧道幾何形狀的影響可以忽略[23],因此,本文僅考慮地層參數和盾構掘進參數。參考既有文獻[12-13,23-26],結合實際盾構施工經驗,選取盾構姿態的主要影響因素作為輸入變量,包括:盾構掘進參數(上一環盾構姿態PSA,土倉壓力CP,掘進速度TV,千斤頂推力JT,刀盤扭矩CT,出土量BE)、地層參數(上覆土層厚度OT)和鉸接行程(左上HDUL,右下HDLR,左下HDLL,右上HDUR)。由于上覆土層為單層,掘進過程中周圍土體的內摩擦角、黏聚力等參數可認為不變,因此,輸入變量中的地層參數僅考慮上覆土層厚度,該厚度可根據區間地質剖面圖和盾構掘進環號對應起來。同時,分別選取表征盾構姿態的4個參數(盾首水平偏差HHD,盾首垂直偏差HVD,盾尾水平偏差THD,盾尾垂直偏差TVD)作為模型輸出變量。
2.2.1 描述性統計
對收集的200環數據進行統計,各變量的統計特征如表1所示。
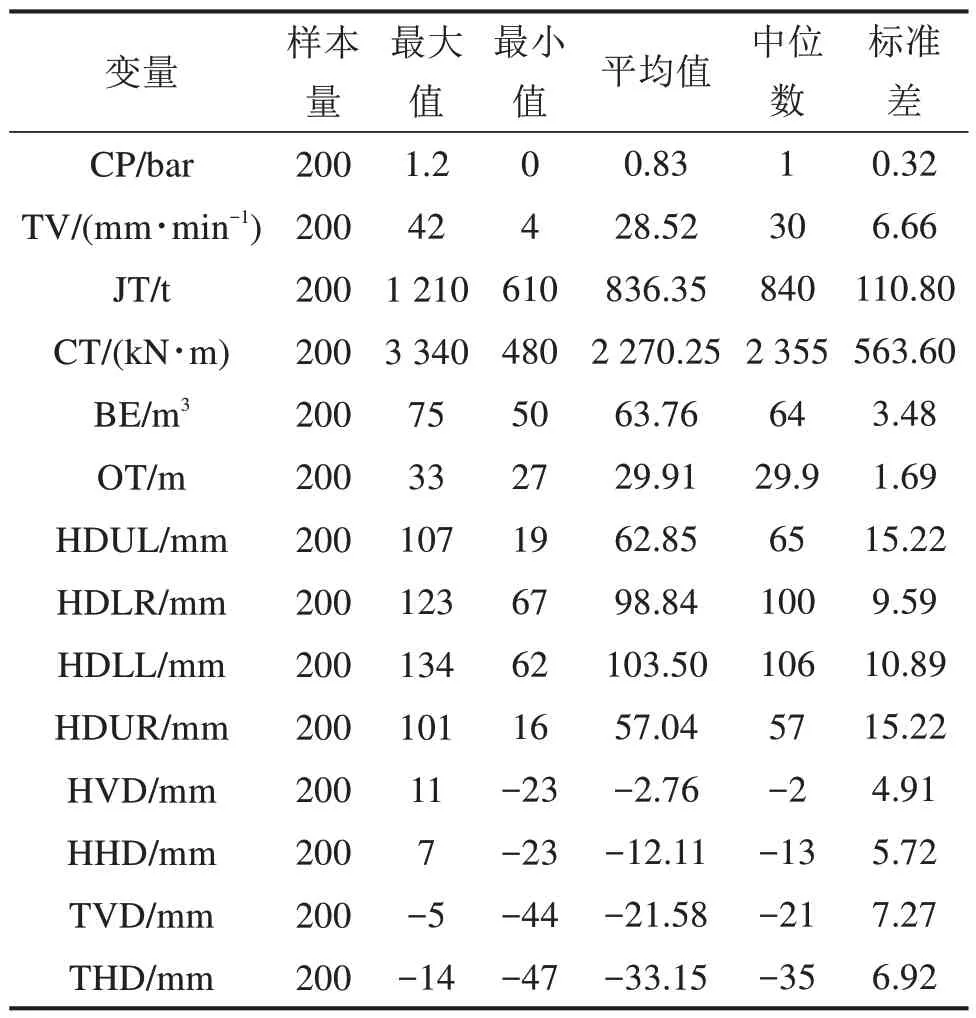
表1 數據統計特征Table 1 Statistical properties of data
2.2.2 相關性分析
對原始數據各變量間的相關性進行分析,圖2為原始數據矩陣散點圖(以盾首垂直偏差為例),可以看出,作為典型的時間序列問題,盾構姿態(SA)與上一環盾構姿態(PSA)相關性最高,皮爾遜相關系數為0.80,呈正相關關系,除上一環盾構姿態外,其余輸入變量與盾構姿態的皮爾遜相關系數較小,線性相關性較弱,輸入變量與盾構姿態之間不存在簡單的線性關系,因此,傳統線性回歸模型不適用于盾構姿態預測,應選用對變量之間非線性相關性具有較強學習能力的機器學習模型[27]。另一方面,各輸入變量之間同樣存在相關性,其中,掘進速度與刀盤扭矩、千斤頂推力呈正相關關系,與工程經驗一致,實際盾構掘進困難時,往往采取增大刀盤扭矩和千斤頂推力的方式提高盾構掘進速度,當刀盤扭矩過大時,可以采取降低推進油缸推力和適當降低盾構掘進速度等措施,上覆土層厚度與盾構鉸接位移呈正相關關系,左上鉸接行程與右上鉸接行程呈正相關關系,左下鉸接行程與右下鉸接行程呈正相關關系,當俯仰角變化時,位于上側或下側的盾構鉸接行程應同時增大或減小。

圖2 原始數據矩陣散點圖(以盾首垂直偏差為例)Fig.2 Matrix scatter of raw data (taking the vertical deviation of shield head as an example)
2.3 數據預處理
2.3.1 數據歸一化
歸一化數據可以加快梯度下降的收斂速度,并提高預測模型的性能,在處理非標準化數據時,梯度下降可能變得相當困難[28]。數據歸一化還可以簡化深度學習模型,從大量歷史輸出數據集中提取擴展特征,從而潛在地提高模型的性能。為權衡預測精度和訓練時間,在收集大量歷史數據后,使用最大-最小歸一化方法將原始數據歸一化至區間[0,1]。
2.3.2 異常值處理
盾構掘進過程中,由于復雜環境因素對傳感器的影響,所獲取的盾構姿態數據可能會與實際盾構姿態存在一定偏差,這些異常數據會影響施工人員對盾構姿態進行及時修正,從而導致盾構掘進軸線與設計軸線偏離[29]。箱形圖又名盒式圖,可以用來顯示數據的分散情況,直觀反映數據中的異常值,箱型圖的方形箱體的上下代表數據的1/4和3/4 位數,即數據的一半在箱體范圍內,箱型圖的上下邊緣代表數據的最大與最小值,箱型圖上下邊緣外的數據點表示數據中的異常值。圖3為歸一化處理后的數據箱形圖,可以看出,原始數據中除上覆土層厚度外,其余數據中均存在較多異常值。

圖3 盾構數據箱形圖Fig.3 Box diagram of shield data
為了降低異常數據對預測模型產生的影響,提高數據分析的準確性,常常需要對異常數據進行處理[30],對于異常數據的主要處理方法為將異常數據視為缺失值進行插補,插補的方式包括均值濾波、中值濾波等。本文采用均值濾波方法對盾構姿態原始數據進行去噪,將異常值兩側數據的平均值作為異常數據的替代值。圖4為去噪前后的盾構姿態參數,包括HVD,HHD,TVD 和THD,可以看出,盾構姿態原始數據存在較多噪聲數據,利用均值濾波對原始數據進行去噪后,所得盾尾姿態隨掘進環號變化曲線較去噪前的曲線更加光滑,盾構姿態發生突變的異常點較去噪前數據少,有利于提高機器學習模型的預測準確率。
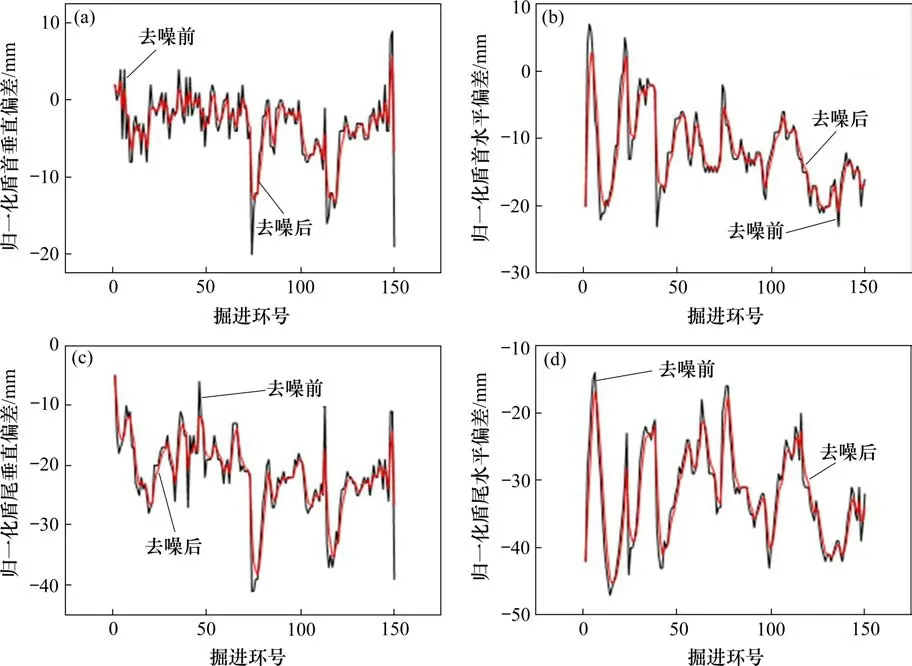
圖4 去噪前后的盾構姿態參數Fig.4 Shield attitude parameters before and after denoising
2.4 模型建立
將數據集劃分為訓練數據集和測試數據集,根據樣本集數據的總數,將75%的樣本數據作為訓練集(共計150 環),25%的數據作為測試集(共計50 環),其中,訓練集數據用于訓練AM-BiLSTM模型參數并驗證模型是否過擬合,測試集用于測試AM-BiLSTM 模型的預測效果,利用訓練得到的模型對測試集數據進行盾構姿態的預測,并與實際盾構姿態參數進行對比。
模型需要手動設置的參數包括:BiLSTM 層數、BiLSTM 層單元數、注意力層數、批尺寸、訓練次數。其中,BiLSTM 層可以利用前向數據和后向數據,提高模型對非線性數據的擬合能力,然而,BiLSTM 層過多會導致過擬合并消耗大量時間,因此模型中BiLSTM 層數設置為2 層。BiLSTM 層單元數表示每層BiLSTM 層中的神經元數目,神經元數目過少會導致模型無法學習規律性,過多則會導致大量訓練參數,降低模型訓練效率,因此BiLSTM 層中的神經元數目最終設置為128個。注意力層對BiLSTM 層處理后的輸出向量進行加權操作,突出更顯著的輸入特征,并將特征映射到樣本標簽空間,可以輔助模型做出更正確的決策[31]。來自BiLSTM 層的前向和后向隱藏狀態均與注意力層連接以產生一個隱藏狀態矩陣,該矩陣由一個128維的注意力矩陣操作,輸出通過具有ReLU 激活函數的線性全連接層轉化,從而產生128 維的注意力向量。小批量梯度下降將數據分成若干個批,逐批更新參數,一批數據共同決定了梯度的方向,導致下降時難以越過最優值,從而降低了隨機性,通過優化,本文將批尺寸設置為32。訓練次數是前向和反向傳播中所有批的單次迭代,在本文中,訓練次數設置為1 000。為了實現模型優化的快速收斂并獲得全局最優解,選擇自適應矩估計算法(Adam)對模型進行訓練[32],Adam 是一種基于低階矩自適應估計的目標函數梯度優化算法,其中,1 階矩計算過去和當前梯度的期望,這樣每次更新都不會和之前相差太大,使得過渡平滑穩定,2 階矩計算過去和當前梯度的平方的期望值,提高了對環境的適應能力。
3 結果分析
圖5為測試集上盾構姿態隨掘進環號的變化曲線,由圖可知,AM-BiLSTM 對盾構姿態具有良好的預測性能,其預測值與實際盾構姿態參數十分接近,對垂直偏差的預測精度大于水平偏差,除個別盾構姿態變化較大處,垂直偏差預測值與實際值的絕對誤差在3.3 mm 以內,水平偏差預測值與實際值的絕對誤差在4.1 mm 以內,相對于實際施工中盾構姿態控制標準均處于可接受范圍之內,兩者隨掘進環號的變化趨勢基本一致。另一方面,相較于AM-BiLSTM 模型,LSTM 對盾構姿態的預測性能較差,盾構姿態變化明顯處的預測值往往偏大,模型泛化能力較差,這表明通過多層結構對數據進行前向和后向操作可以有效地挖掘數據,捕獲更多的數據信息。BiLSTM 的預測精度同樣小于AM-BiLSTM,對盾構姿態的預測值一般偏小,說明在BiLSTM 基礎上加入注意力機制可以有效降低預測結果與真實值的偏差程度。由此可知,AMBiLSTM 相比BiLSTM 和LSTM,可更好地預測盾構姿態。
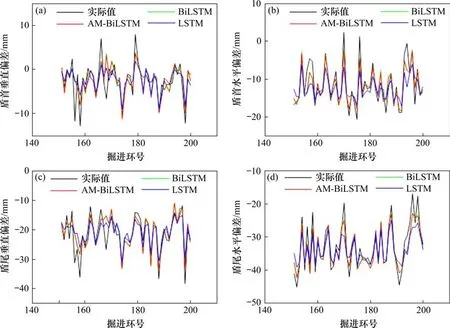
圖5 盾構姿態隨掘進環號變化曲線Fig.5 Variation of shield attitude with ring number
為進一步量化評估AM-BiLSTM 模型對盾構姿態的預測性能,分別計算模型在訓練集及測試集上的預測性能指標,并將其與BiLSTM 和LSTM 模型進行對比。模型預測性能指標選用平均絕對誤差MAE,均方根誤差RMSE和決定系數R2。AMBiLSTM 模型在訓練集及測試集上的預測性能指標如圖6 所示,可以看出,AM-BiLSTM 模型在預測盾構姿態時具有較高的精度,在訓練集上,模型對盾首垂直、水平偏差的預測準確率分別為87%和93%,對盾尾垂直、水平偏差的預測準確率分別為92%和96%,均大于85%,在測試集上,模型對盾首垂直、水平偏差的預測準確率分別為72%和86%,對盾尾垂直、水平偏差的預測準確率分別為88%和96%,均大于70%,可見AM-BiLSTM模型對盾構姿態具有良好的預測性能,能夠較為準確地對塊石回填土區盾構掘進過程中的姿態參數進行預測。另一方面,對于盾首垂直偏差,模型在訓練集上的預測性能大于測試集,說明模型在訓練過程中出現了過擬合現象,而對于其余盾構參數,模型在訓練集和測試集上的表現較為一致,模型訓練過程中均為出現過擬合現象。各模型在測試集上的預測性能指標如表2所示,表中分別展示了AM-BiLSTM,BiLSTM 和LSTM 對盾構姿態的預測精度,可以看出,相較于BiLSTM 和LSTM 模型,AM-BiLSTM 的平均預測結果準確率最高,BiLSTM 次之,LSTM 的預測準確率最低,進一步證實了AM-BiLSTM 盾構姿態預測模型具有較好的預測精度和模型泛化能力。
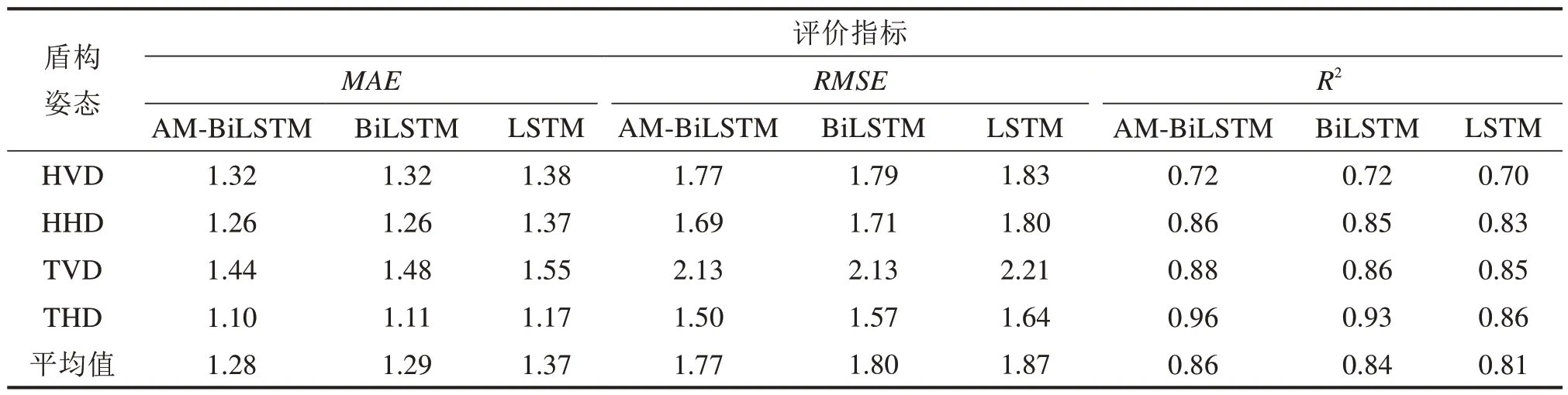
表2 不同模型的預測性能指標Table 2 Prediction performance indicators of different models
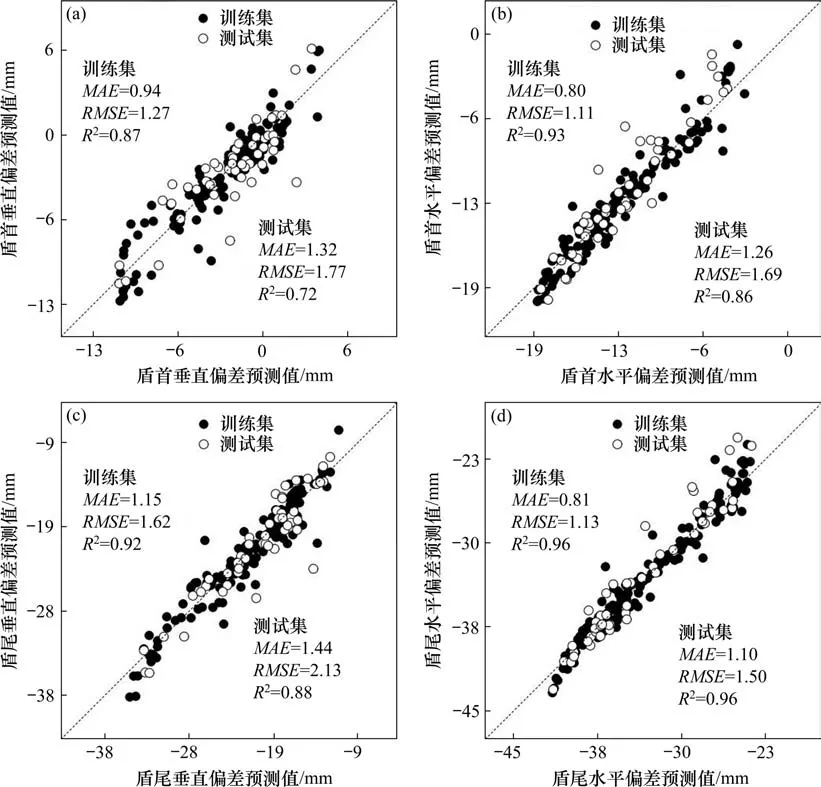
圖6 AM-BiLSTM模型盾構姿態預測性能Fig.6 Prediction performance of the AM-BiLSTM model
為了研究模型在實際應用中的可行性,對每個模型的訓練時間進行記錄,以判斷模型在實際應用中是否能夠高效訓練。AM-BiLSTM,BiLSTM 和LSTM 在樣本集上的訓練時間分別為5 min 23 s,4 min 30 s 和2 min 13 s,可見AM-BiLSTM模型的預測準確率較高,但劣勢也很明顯,與單向LSTM相比,它的訓練時間更長,說明當用于大數據量和高維度的數據預測時,AM-BiLSTM 會犧牲部分效率來提高模型精度。
4 現場應用
實際施工過程中,將事前模型預測與事后調整結合對盾構姿態進行控制,當模型預測結果顯示在接下來掘進過程中盾構姿態將發生超限時,提前采取工程措施防止盾構姿態發生超限,避免對盾構機及管片結構造成破壞。盾構穿越塊石回填土區可能遭遇大塊人工拋石,這些人工拋石易形成孤石區域,掘進過程中遭遇孤石會導致盾構姿態控制困難,被刀盤推向隧道側面的孤石甚至導致盾構轉向,偏離隧道軸線等。因此,對于盾構穿越塊石回填土區段,當AM-BiLSTM 模型預測盾構姿態即將發生超限時,采取以下工程措施以調整盾構姿態:1) 嚴格監測推進油缸和盾構姿態的突然變化以及土倉壓力和渣樣的變化,如發現異常應結合勘察情況判斷是否存在孤石并估算孤石與刀盤的位置關系,待盾構刀盤接近孤石后,采用低貫入度,增加泡沫注入量,以“小推力、高轉速、低扭矩”為指導思想,使刀具對孤石的切削、沖擊頻率加大,靠刀盤的沖擊破碎通過孤石區域[33];2) 沿盾構機中盾土倉壁拱部設置超前鉆孔,向開挖面注入泡沫或膨潤土,進行超前注漿,待達到指標要求后方可進行掘進,同時,在盾構機到達回填土區前,利用從地面注漿、旋噴等輔助手段對工作面進行注漿加固,改善土體均勻性,減小盾構推進時的不均勻阻力;3) 嚴格控制盾構的掘進速度,推進時速度應控制在35~50 mm/min,既可以避免因推力過大而引起的側向壓力的增大,又能減小盾構推進過程中對周圍土體的擾動。另外,在轉彎時應采取短行程多循環的方式進行掘進,為避免千斤頂推進造成管片破損,可每30~50 mm 適量收縮千斤頂,使得千斤頂對管片的應力得以釋放,同時有利于盾構方向調整;4) 每環襯砌拼裝完畢后,及時靠攏千斤頂,防止盾構機后退,同時,及時擰緊縱、環向螺栓,在推進下一環時,在千斤頂頂力的作用下,復緊縱向螺栓,當成環管片推出盾尾后,根據拼裝后的圓環橢圓度,再次復緊縱、環向螺栓,以減少管片拼裝的張角和喇叭口。
將AM-BiLSTM 模型應用到后續盾構掘進過程(201~250環)中,并與地面監測反饋信息和現場工程措施結合,對盾構掘進參數進行動態管理,以檢驗AM-BiLSTM 模型的現場應用效果。圖7 為將AM-BiLSTM 模型事前預測與現場工程措施結合后,盾構姿態隨掘進過程的變化曲線。其中,盾構掘進151~200 環過程中,采取現場工程措施對盾構姿態進行調整時,未考慮AM-BiLSTM 模型的預測值,掘進201~251環過程中,將AM-BiLSTM預測模型與現場工程措施結合,根據盾構姿態預測結果對掘進過程中的盾構姿態進行有效調整。可以看出,盾構掘進151~200 環時的盾首垂直、水平偏差平均值分別為-2.5 mm 和-11.9 mm,盾構掘進201~250 環時的盾首垂直、水平偏差平均值分別為-1.3 mm 和-7.7 mm,較掘進151~200 環時分別降低47.9%和35.8%;盾構掘進151~200環時的盾尾垂直、水平偏差平均值分別為-20.9 mm 和-33.3 mm,盾構掘進201~250 環時的盾尾垂直、水平偏差平均值分別為-19.0 mm 和-31.7 mm,較掘進151~200環時分別降低8.9%和4.8%。由此可知,將AM-BiLSTM 事前預測與事后工程措施結合,可以減小現場工程措施的滯后效應,有效降低盾構掘進過程姿態的偏差量,盾構機在穿越塊石回填土層過程中,未出現較大盾構姿態偏差,安全快速地通過了塊石回填土區段,表明盾構掘進參數選取合理,姿態控制良好,提出的AMBiLSTM 盾構姿態預測模型對于塊石回填土區段盾構姿態控制具有一定指導意義。

圖7 事前預測與事后調整結合后的盾構姿態變化曲線Fig.7 Shield attitude variation after the combination of prior prediction and subsequent adjustment
5 結論
1) 基于注意力機制,提出了盾構姿態的AMBiLSTM 預測模型,模型預測盾首垂直和水平偏差的相關系數分別為72%和85%,預測盾尾垂直和水平偏差的相關系數分別為86%和93%,均大于70%,表明AM-BiLSTM 模型對盾構姿態的預測準確率較高,可用于盾構姿態的事前預測。
2) 將AM-BiLSTM 模型預測結果與BiLSTM,LSTM 進行對比,結果顯示AM-BiLSTM 的預測準確率最高,BiLSTM 次之,LSTM 的預測準確率最低,表明AM-BiLSTM 盾構姿態預測模型具有較好的預測精度和模型泛化能力。另一方面,由于加入了注意力機制和反向結構,AM-BiLSTM 模型的訓練時間比BiLSTM 和LSTM 模型的訓練時間長,導致訓練效率較低。因此,對于大數據量和高維度的數據預測,在選擇模型進行訓練時,應權衡模型的預測精度和預測效率。
3) 將AM-BiLSTM 模型應用到后續盾構掘進過程中,并與現場工程措施結合,可以減小現場工程措施的滯后效應,有效降低盾構掘進過程姿態的偏差量,提出的AM-BiLSTM 盾構姿態預測模型對于塊石回填土區段盾構姿態控制具有一定指導意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
