自旋載體中的超緊組合GNSS接收機跟蹤環路設計*
2023-09-28 07:21:22謝郁辰劉瀛翔陳飛強王飛雪
國防科技大學學報 2023年5期
關鍵詞:信號
謝郁辰,劉瀛翔,陳飛強,王飛雪
(國防科技大學 電子科學學院, 湖南 長沙 410073)
全球導航衛星系統(global navigation satellite system, GNSS)能夠提供高精度且連續穩定的位置、導航和時間信息服務,相關應用已普及到各行各業。自旋載體的導航定位,是GNSS的一種典型應用,尤其常見于航空航天器和各類制導武器之中[1-3]。然而,當載體自旋時,隨載體旋轉的接收天線會在信號載波相位測量值中引入高階動態,導致傳統的衛星導航接收機環路無法進行長時間的相干積分,甚至造成環路失鎖,影響定位性能[4-6]。
針對自旋載體接收機中的GNSS信號跟蹤問題,學者們進行了許多相關的研究并提出了多種解決方案。文獻[7]研究對比了三種用于炮彈中GNSS信號跟蹤的方法,分別為射頻前端求和方法、波束成形方法和最大增益方法,并且作者在文獻[8]中提出了在旋轉圓柱載體接收機中利用兩個微帶天線進行信號連續跟蹤的方法,然而相關研究主要針對的是自旋載體引起天線方向圖零陷旋轉導致信號丟失的問題,而對自旋載體接收機中載波鎖相環(phase lock loop,PLL)的動態應力誤差論證較少。文獻[9]中指出,當自旋載體的轉速超過1.85 Hz時,周期性的多普勒頻移對載波跟蹤環的影響可以忽略,但是其研究的自旋載體的旋轉半徑較小(77.5 mm),引入的最大多普勒頻移并沒有超出環路的牽引范圍。文獻[10]提出了一種旋轉解調模塊結構,并使用四階環路用于跟蹤自旋載體的載波相位,但是高階環路導致相應的PLL并不穩定,因此需要控制載體的轉速在一個很小的范圍之內。文獻[11-12]提出并測試了一種簡單有效的旋轉跟蹤環路,但是使用該環路的相位跟蹤誤差最大為22°,仍有很大的優化空間。同時,為了跟蹤自旋載體接收機中高動態信號,上述研究中的信號相干積分時間都較短(1 ms),而延長相干積分時間則很可能導致環路失鎖。相干積分時長和自旋載體轉速之間的矛盾仍沒有得到很好的解決。
另外,慣性導航系統(inertial navigation system,INS)能夠提供高精度的載體速度、姿態信息,進而估計接收信號的多普勒頻率,對GNSS環路進行輔助,有效減輕PLL的動態應力[13]。相關設計是一種超緊組合(ultra-tight coupling,UTC)結構,在高動態場景中已得到成功應用[14]。雖然文獻[15]指出當自旋載體的轉速很高時,慣性器件輸出的速度、姿態信息的精度將有所下降,但是利用UTC能夠為自旋載體接收機信號跟蹤及導航定位提供怎樣的性能改善仍然值得進行研究分析。
利用導流洞改建的龍抬頭無壓泄洪洞設計經歷過較長時間的前期論證,至今應用已較普遍,當庫水位至出口落差達100 m時其運用開啟應較為謹慎,因為即便施工質量控制良好,出現局部損壞可能仍較大。以紫坪鋪面板壩為例,排除震損情況,導泄結合段環氧砂漿損壞,經修復后,2013年汛期泄洪檢查仍有局部空蝕破壞。目前看,高面板壩龍抬頭無壓泄洪洞設計已近極限狀態。
因此,本文針對自旋載體接收機的信號跟蹤和導航定位問題進行研究,通過理論分析推導了自旋載體的旋轉運動會在載波信號相位中引入兩種正弦動態,而傳統的跟蹤環路無法處理這種信號動態,當轉速較高時PLL將失鎖。同時,提出了一種用于自旋載體的UTC環路設計方法,能夠在自旋載體接收機中保持環路較長相干積分時間(10 ms)的同時,維持信號的穩定跟蹤。此外,還對UTC中INS信息輔助速率、自旋載體轉速、相干積分時長和信號載波相位誤差之間的關系進行了理論推導與仿真分析。
1 信號與卡爾曼濾波模型
1.1 自旋載體接收信號模型
在自旋載體中,旋轉中心和接收機的天線相位中心可能并不重合,并且旋轉中心也可能隨載體運動。假設自旋載體從A地運動到B地,如圖1所示,其中點劃線為自旋載體質心的運動軌跡,虛線為天線相位中心的旋轉軌跡。

圖1 自旋載體的運動軌跡Fig.1 Movement of spinning vehicle

為確定天線相位中心的ECEF坐標,以旋轉中心為坐標原點建立旋轉坐標系R,其中R系的XOY平面為天線相位中心所在的旋轉面,Z軸ZR垂直于其XOY平面,方向與天線旋轉的角速度ω相同。R系的X軸與Y軸采用如下方式定義:將天線的旋轉面延伸至與ECEF系的XOY平面相交于直線l,在R系的XOY平面中僅有一條直線經過坐標原點且平行于l,選取該直線為R系的X軸XR,并以右手準則確定其Y軸YR。R系三個方向的坐標軸XR、YR、ZR以及坐標原點的相對關系如圖1所示。在R系中旋轉的天線,其坐標可表示為:
(1)
式中,上標r表示R坐標系,ω為旋轉的角速度,t為時間。
患者發現的總趨勢是由普查向重點檢查發展。進入70年代,美國、荷蘭、瑞典、丹麥、加拿大等歐美國家由于反復多次普查,特別是化療時代疫情明顯下降,普查檢出率下降,因而在許多國家或地區開始減少用普查,而代之以因癥就診者檢查。1970年捷克、挪威、加拿大、荷蘭四國得到WHO和IUAT的支持,開展了患者發現方法的研究。證明在一個國家或地區即使開展普查也只能發現新發患者的10%~15%,而絕大多數肺結核是因癥就診發現[1 1]。所以X線普查或集檢每發現1例肺結核費用大為提高,同時印度報告,有癥狀者被動的患者發現極為有效。
由R系到ECEF系的坐標系變換可由兩次旋轉和一次平移得到,如圖2所示。

圖2 R系到ECEF系的坐標系變換Fig.2 Transformation from R frame to ECEF frame
則旋轉天線在ECEF系內的坐標可表示為:
(2)

(3)
(4)
式中:Vk為測量噪聲矩陣;Hk為測量矩陣,包含了在測量與狀態之間的非線性近似。它們的具體形式也在文獻[17]中詳細說明。
(5)
ECEF系中從天線指向衛星的向量為:
(6)

節點功能主要是進行CO2及溫度的采集,節點是由微控制器模塊MCU(Microcontroller Unit)、電源(source)、無線通信模塊RF(Radio Freqency)和傳感器模塊(sensor)組成,其中MCU采用極低功耗的stm8系列單片機作為數據采集器處理單元的核心,并根據需求構建了外圍電路;通信模塊采用基于WIA-PA技術的無線模塊,此模塊由中國科學院沈陽自動化研究所自主研發。節點硬件結構圖如圖2所示。
例如,在教學《人民幣的認識》時,掌握1元=10角是本節課的教學重點,為了讓學生在情境中體驗認識1元=10角,我設計了以下的活動:
(7)

由式(7)可得自旋載體接收機的載波多普勒頻率為:
(8)
式中,fl為信號的載波頻率,fdop為信號的多普勒頻率,c為光速。接收信號的相位θ可以通過信號頻率對時間積分得到:

(9)
由式(7)到式(9)可以看出,自旋載體的旋轉和運動在接收信號中引入了兩種正弦動態,它們不僅與天線的旋轉有關,同時還與載體旋轉中心的運動有關。
傳統的接收機PLL環路通常采用二階或三階環路的形式,其中二階環能穩定無偏跟蹤頻率階躍的動態,三階環能穩定無偏跟蹤頻率斜升的動態[16]。N階環路的穩態跟蹤誤差可以表示為:
(10)

1.2 組合導航卡爾曼濾波模型
GNSS與INS的組合導航,通常使用擴展卡爾曼濾波器(extended Kalman filter,EKF)融合來自兩個不同系統的導航信息,并采用誤差濾波的方式進行數據處理。
UTC中常用的狀態模型為17×1維的向量,分別是3×1維的位置誤差δr、速度誤差δv、姿態誤差δψ、加速度計偏差ba和陀螺儀偏差bg;2×1維的時鐘誤差bc,包括鐘差和鐘漂。狀態向量可以表示為:
Xk=[δr,δv,δψ,ba,bg,bc]T
(11)
學生戀愛危機的潛伏性和預見性,說明危機可以提前進行預防。做好預防,能夠有效地減少危機出現,或者降低危機帶來的危害性。班級危機偵察小組要發揮眼睛和耳朵的作用,作為班級的“心理偵察員”,要及時準確的對戀愛征兆信息進行搜集、分析與上報。同時高校應該針對各類戀愛危機事件的發展規律和趨勢,編寫戀愛危機處理手冊,以便發生危機時能更加有序高效地開展工作。有條件的高校還可以組建大學生情感心理工作室,工作室秉承尊重、保密的原則,為被情感困擾的學生排憂解難,降低戀愛危機事件發生的幾率。
Xk+1=φkXk+ΓkWk
(12)
式中,Wk為狀態的噪聲向量,φk為狀態轉移矩陣,Γk為系統噪聲驅動矩陣,其具體表達式較復雜,可參考文獻[17]中的詳細說明。
若采用誤差濾波的方式,則UTC中的測量值為M顆可見衛星由GNSS測量的偽距和偽距率與由INS估計的偽距和偽距率的差值,以單顆衛星為例,有:
(13)
測量方程為:
Zk=HkXk+Vk
(14)
因此由R系到β系的坐標變換矩陣為:
在此次創新戰略中,美國首次提出政府層面的服務創新策略,并采取人才、創新思維和技術的結合來提高政府的工作績效。政府部門的具體創新措施主要包括以下4個方面:一是創建“創新工具包”,改進政府核心服務流程,提高政府解決問題的效率;二是建立政府創新實驗室,激發政府部門工作人員的創新能力;三是創建數字服務團隊,提升政府部門對美國民眾和企業的在線服務質量;四是建立證據機制來推動社會創新。
因此,組合導航的EKF濾波過程可以由五個步驟循環進行[18]。
步驟1:預測先驗的狀態向量。
(15)
步驟2:計算先驗的新息矩陣。
(16)
為簡化分析,假設衛星、旋轉天線和旋轉中心三者共面,幾何關系如圖7所示,其中r為旋轉半徑。則LOS方向上的速度為:
對兩組患者的護理后的護理總有效率、護理滿意度、并發癥發生率進行觀察,在觀察護理滿意度這一指標時,主要應用的是百分制問卷調查法,滿意:大于85分;較滿意:在60~85分之間;不滿意:小于85分。護理滿意度等于滿意與較滿意的總人數除以例數。
從各種物性指標來看硬度值越低,嫩度越高[14]。說明犢牛肉的硬度比成年牛肉低,嫩度比成年牛肉高。其中里脊的嫩度最好。這與上面剪切力值的結果是一致的。
Qk-1=E[Γk-1Wk-1·(Γk-1Wk-1)T]
(17)
步驟3:計算EKF濾波增益。
2)市外電源方面,形成了2+X格局:(1)華東電網內的安徽煤電基地,(2)華東電網外的三峽和金沙江等西南水電,并在華東電網內參與建設核電、抽水蓄能等項目。
至臻天文臺認證測試采用全自動設備,可24小時運作,對腕表的全面檢測需經過283個步驟方可完成。METAS亦設有獨立的辦公室,以監督檢測過程,確保每一枚擁有至臻天文臺認證的腕表均達到行業高標準的精準度、防磁性和其它性能。
(18)
對自旋載體接收機的信號特性、UTC跟蹤環路性能以及誤差特性進行仿真。為簡化分析,仿真中假設接收天線隨載體在水平面內繞定軸逆時針旋轉,載體的高度沒有發生改變,則圖1所示的三維空間內的運動退化為如圖7所示的平面內運動。仿真中GNSS接收機環路采用二階延遲鎖定碼環(delay lock loop,DLL)和三階鎖相環的方式,UTC接收機環路采用INS輔助二階鎖相環的方式,仿真中使用的主要參數在表1中列出,為對比不同精度等級的慣性測量單元(inertial measurement units,IMU)對性能的影響,選擇為商業級和戰術級的慣性器件,其誤差特性分別在表2和表3中列出。
(19)
保持PLL環路鎖定的典型條件為環路相位誤差的3倍不超過45°:
(20)
步驟5:更新EKF新息矩陣,其中I為單位矩陣。
(21)
至此完成EKF濾波,得到各狀態的估計值。UTC中使用這些狀態量對位置、速度、姿態、加速度計、陀螺儀、時鐘進行修正,可以求解并輸出最終的導航信息。
2 UTC跟蹤環路設計
傳統GNSS單系統的接收機結構如圖3所示。經射頻前端采樣后的數據與本地生成的兩路正交載波相乘后,再與本地偽碼相干積分,得到I、Q兩路相干積分結果。經環路鑒相與濾波,接收機通過調整偽碼和載波相位的數控振蕩器(number controlled oscillator,NCO),控制本地碼相位、載波相位與接收信號保持同步。

圖3 GNSS單系統接收機結構Fig.3 Structure of GNSS single system receiver receiver
接收機保持相位鎖定的關鍵在于環路NCO的控制。由式(10)可知,N階環路可以穩定無偏地跟蹤N階的位移動態,但是高階環路容易發散,工作并不穩定。因此通常接收機的環路不超過三階,環路濾波器傳遞如圖4所示[16]。

圖4 三階環路濾波器傳遞框圖Fig.4 Transfer structure of 3-order loop filter
環路的系統函數為:
(22)
式中,ωn為環路特征頻率,K為環路增益,s表示微分,a3、b3是環路系數。
INS有很高的數據輸出率,通常為200~2 000 kHz,能夠更及時感覺到載體的動態變化,提供更高精度的速度、姿態信息。因此,如果使用INS提供的動態信息輔助GNSS,則GNSS僅需要維持二階環路,用于處理環路中INS殘留的動態應力誤差以及噪聲誤差。相應的接收機設計如圖5所示。

圖5 UTC接收機結構Fig.5 Structure of UTC receiver
在UTC跟蹤環路中,NCO由INS估計的多普勒頻率直接控制,在每次INS數據輸出時進行更新。在每個相干積分周期結束進行環路濾波時,INS估計的多普勒頻率和環路濾波的結果共同更新NCO,其中環路濾波結果用于修正殘留的動態應力誤差和噪聲誤差。UTC環路濾波器的傳遞框圖如圖6所示。
狀態向量的轉移矩陣為:

圖6 UTC環路濾波器傳遞框圖Fig.6 Transfer structure of UTC loop filter
由于INS有較高的數據輸出速率對環路進行輔助,NCO能夠快速更新適應自旋載體的動態。NCO在每次更新時刻到來之前保持不變,這段時間內的相位誤差即INS輔助的殘留動態應力誤差,需要由GNSS環路在每次相干積分結束時由環路濾波進行補償。當自旋載體轉速很高時,殘留動態應力誤差也會隨之增大,同樣會造成環路失鎖。因此,INS信息輔助速率、載體旋轉速度和相干積分時長之間存在制約關系。
其中,Qk-1為狀態噪聲的協方差陣。

圖7 旋轉天線與衛星的幾何關系Fig.7 Geometrical relationship of spinning antenna and satellite
vLOS=ω·r·sin(ωt)
(23)
因此接收信號的多普勒頻率為:
“路”并不是在你腳下的可供行走的道路,而是指一切能夠滿足寶寶需求的具體做法。歸納起來,可以有以下4個問題:
(24)
假設相干積分的起始時刻為T0,相干積分時長為Tcoh,則一個相干積分周期內,由多普勒頻率引起的信號相位變化量為:
(25)
假設INS信息輔助速率為1/Taid,且有Tcoh=NTaid,其中Taid為INS數據輸出的周期。 INS在每次輸出數據時估計的多普勒頻率,在一個Taid周期內保持不變,則INS控制NCO產生的相位變化量為:
(26)
因此,殘留的動態應力相位誤差為:
θres=θdop-θaid
(27)
步驟4:更新狀態向量的預測值。
80年代在中國東部沿海一帶的玄武巖中,相繼發現了許多藍寶石礦床。其中以山東(昌樂)藍寶石質量最佳。晶體呈六方桶狀,粒徑較大,一般在1cm以上,最大的可達數千克拉。藍寶石因含鐵量高,多呈近于炭黑色的靛藍色、藍色、綠色和黃色。以靛藍色為主。寶石級藍寶石中包裹體極少,除見黑色固態包體之外,尚可見指紋狀包體。沒有絹絲狀金紅石及彌漫狀液體包體。藍寶石中平直色帶明顯,聚片雙晶不發育。大的晶體外緣可見平行六方柱面的生長線。山東藍寶石因內部缺陷少,屬優質藍寶石。
3σPLL=3σi+θe<45°
(28)
式中,σi為熱噪聲誤差、晶振誤差和阿蘭方差的均方和,其計算方法可參考文獻[16],θe為動態應力誤差。由此,可以分析在PLL環路不失鎖的條件下,INS信息輔助速率、自旋載體轉速以及相干積分時長之間的關系,詳細的數值仿真分析在第3節中給出。
3 仿真與分析
其中,Rk為測量噪聲的協方差陣。

表1 仿真參數Tab.1 Parameters for simulation

表2 商業級IMU誤差特性Tab.2 Error characteristic of commercial IMU

表3 戰術級IMU誤差特性Tab.3 Error characteristic of tactical IMU
對比自旋接收機與非旋轉接收機信號的多普勒頻率差異,如圖8所示。
從圖8中可以看出,非旋轉接收機的信號多普勒頻率近似緩慢線性變化,這是由衛星運動引起的頻率變化。而自旋載體接收機的信號多普勒頻率在線性變化的基礎上疊加了正弦變化,表現為正弦函數的最大值與最小值緩慢遞增。由式(7)和式(8)可知,這種頻率變化是由載體旋轉引入的LOS方向上的正弦速度產生的,傳統接收機的N階環路設計無法跟蹤快速變化的正弦動態,環路將會失鎖。
對比傳統三階環路和UTC環路對自旋載體接收機信號的跟蹤性能,分別如圖9、圖10和圖11所示。

圖9 碼相位跟蹤誤差Fig.9 Code phase error of tracking loop

圖10 載波相位跟蹤誤差Fig.10 Carrier phase error of tracking loop

圖11 多普勒頻率跟蹤誤差Fig.11 Frequency error of tracking loop
從圖9~11可知,GNSS三階環路無法跟蹤自旋載體接收信號的載波相位,PLL環路失鎖且載波相位誤差發散,達到104量級;碼環的穩健性優于載波環,雖然沒有失鎖,但是碼相位誤差較大(最大值約為0.06 chip),且旋轉呈現出一定的周期性;由于載體定軸旋轉,多普勒頻率周期變化,雖然GNSS環路失鎖,但是頻率誤差仍表現出周期性。
UTC環路能夠穩定跟蹤信號的碼相位、載波相位和多普勒頻率。使用商業級IMU時,碼相位誤差基本小于0.025 chip,載波相位誤差小于50°,多普勒頻率誤差基本小于1 Hz;使用戰術級IMU能取得更好的性能,碼相位誤差小于0.01 chip,載波相位誤差小于10°,多普勒頻率誤差小于0.4 Hz。由于載體周期運動,載波相位誤差和多普勒頻率誤差也呈現一定的周期性,但這種周期性在使用消費級IMU時不明顯,因為IMU的誤差水平較大,噪聲誤差成為主要成分。三種環路碼相位誤差、載波相位誤差和多普勒頻率誤差的統計特性對比如表4所示,可以看出:UTC-商業級IMU環路雖然能夠保持信號跟蹤,但是誤差較大,不能夠保證高精度的定位;而UTC-戰術級IMU對碼相位誤差的改善程度達到2個數量級,同時能解決載波相位跟蹤發散的問題,且對載波相位、多普勒頻率都取得了良好的跟蹤性能。

表4 跟蹤誤差統計特性Tab.4 Statistic characteristic of tracking error
傳統三階環路和UTC環路對自旋載體的定位性能對比如圖12、圖13和圖14所示。由于載體沒有垂直方向上的運動,圖中僅展示水平面內的運動軌跡。

圖13 UTC-商業級IMU定位軌跡Fig.13 Position result of UTC-commercial IMU loop

圖14 UTC-戰術級IMU定位軌跡Fig.14 Position result of UTC-tactic IMU loop
由于GNSS三階環路無法鎖定信號,只能使用碼相位跟蹤結果定位,從圖中可以看出其定位誤差逐漸發散,10 s內最大誤差超過5 m。UTC環路能夠鎖定信號載波相位,其定位精度很高,導航解算的軌跡與載體的真實運動軌跡基本重合;且使用戰術級IMU的UTC環路定位性能顯著優于使用商業級IMU的UTC環路,殘留的誤差主要來自IMU器件噪聲引起的相位誤差以及UTC環路更新間隔之內的載體旋轉引入的相位誤差。位置誤差的統計特性如表5所示。
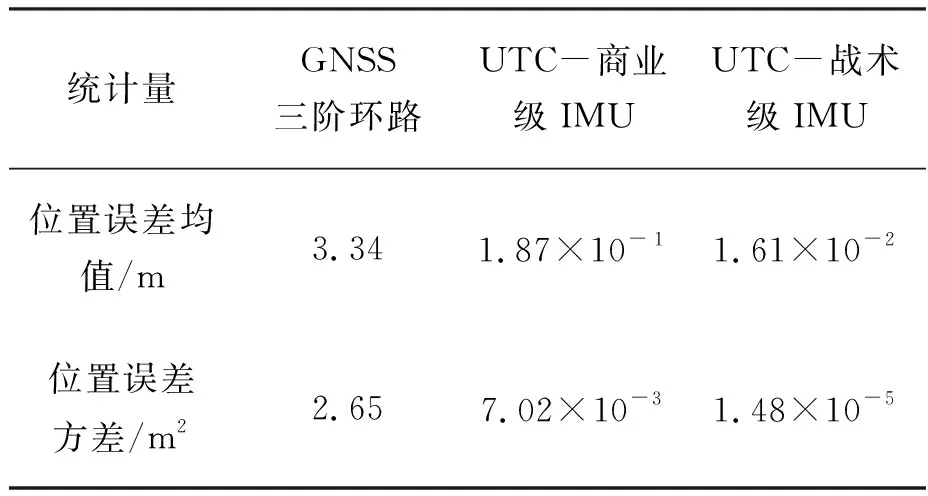
表5 位置誤差統計特性Tab.5 Statistic characteristic of position error
通過數值仿真分析式(25)~(28)中INS信息輔助速率、自旋載體轉速以及相干積分時長之間的關系。由于相干積分時長與環路輸出的信噪比以及定位性能密切相關,在接收機設計時通常希望盡可能延長相干積分時長來提升性能。因此數值仿真中設置相干積分時長為10 ms,主要研究分析INS輔助信息速率與自旋載體轉速之間的關系。仿真結果如圖15所示。

圖15 INS輔助周期與轉速的關系Fig.15 Relationship of INS-aid period and angular rate
從圖15中可以看出,由設置的仿真參數計算的殘留動態應力誤差門限約為29.2°。當自旋載體轉速增大時,相同INS信息輔助周期Taid的殘留動態應力誤差有一定程度的振蕩,且最大值有增大的趨勢。殘留動態應力誤差的曲線與門限可能有多個交點,且相交后誤差可能減小到0。但需要注意的是式(25)~(28)的推導中假設衛星與天線的旋轉共面,實際中由于不同衛星與天線的旋轉面存在一定夾角,其投影在旋轉面上的速度比實際轉速更小,且存在一些特殊信號入射角度使得引入的殘留動態應力誤差為0,但這并不是普遍的現象。因此不同Taid下可以承受的最大轉速ωmax應當是曲線與門限的第一次交點,這樣才能保證不同衛星在旋轉面內的投影速度小于ωmax時殘留動態應力誤差都不會超過門限,ωmax的理論值如圖中黑色標記與箭頭所示。由此可以看出,隨著Taid減小,INS信息輔助速率加快,UTC能夠承受的最大轉速逐漸增大,當Taid為1 ms時,理論的最大轉速可以為8.31 Hz。
但需要注意的是,式(25)~(28)的理論推導中沒有考慮INS的誤差。當轉速增大時,IMU的測量誤差將增大,這部分誤差也將作為殘留動態應力誤差由GNSS二階環路處理,從而限制UTC環路能夠承受的最大轉速。更進一步的定量關系將作為下一步的研究內容。
舊學院入口處的建筑頂部,有一個巨大的穹頂,穹頂部分是1887年修建的,與原有的院落型建筑完美地結合在一起,可謂畫龍點睛的一筆。穹頂上還有一座鍍金雕像,名為“青春”,是蘇格蘭雕塑家約翰·哈奇森的作品。
4 結論
針對自旋載體中導航信號的跟蹤問題展開研究。當載體自旋時,旋轉的天線在接收信號的相位中引入高階動態,導致傳統衛星導航接收機環路無法進行長時間的相干積分,甚至造成環路失鎖,影響定位性能。
針對此問題,通過建立信號模型,理論分析了載體自旋在信號相位中引入的兩種正弦動態的形式,提出了一種用于自旋載體的UTC環路設計方法,對比了所提UTC環路結構與傳統GNSS三階環路的相位跟蹤精度與定位性能,并分析了所提UTC環路中INS信息輔助速率、自旋載體轉速以及相干積分時長之間的關系,通過數值仿真計算了不同INS信息輔助速率下UTC環路能夠承擔的最大轉速。仿真結果表明,所提UTC環路能夠解決自旋載體中的導航信號跟蹤問題,顯著提升相位跟蹤精度和定位性能,并且能夠適應較高的旋轉速度。INS誤差對所提UTC環路能夠承受最大轉速的定量影響將作為下一步的研究內容。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06