空陸兩棲爬壁機器人橋梁結構檢測系統應用
2023-10-05 06:38:32段建濤王記濤
中國公路 2023年15期
段建濤 王記濤
(1.河南豫路工程技術開發有限公司,河南 鄭州 450000;2.河南金途科技集團股份有限公司,河南 鄭州 450000)
0 引言
近三十余年來,我國橋梁建設飛速發展,橋梁結構作為跨越物,其使用環境復雜,或跨越河流、或跨越山谷、或跨越道路、或跨越橋梁,乃至跨越海峽,橋梁結構檢測工作存在諸多困難;而根據跨越需求的不同,橋梁結構的結構型式眾多,這也為檢測工作帶來了不便。傳統橋梁病害檢測手段主要依賴橋梁檢測車或人工裸眼檢測,存在局限性和檢查盲區,特別是檢測人員長時間觀察后會引起視覺疲勞,且檢測設備結構龐大存在檢測死角、檢測過程需要封閉道路等。因此,無論是橋梁檢測車還是人工裸眼檢測均會導致檢測范圍不夠全面細致、阻塞交通、作業效率低下、機動性差、成本高昂、難度大、檢測人員存在人身安全隱患等問題,無法保證檢測工作的質量和效率。
目前,隨著服役年限的增加、早期橋梁建設經驗的不足、設計理論的缺陷和運營維護管理的失當,一些橋梁在外界自然環境侵蝕及部分物理化學因素的作用下,結構特征出現偏差并產生諸多的病害,影響其正常使用狀態,因此,需要對其監測或檢測并確定具體的結構狀態。隨著科技進步,橋梁檢測手段也迫切需要創新、高效、智能化、信息化。據此,本文從工程實際施工角度總結并開發了一套安全、高效、可靠的橋梁結構檢測評定系統及應用技術,確保橋梁結構自身及橋上、橋下交通的安全。
1 空路兩棲爬壁機器人工作機理及總體設計
1.1 工作機理
1.1.1 雷達數值仿真分析與試驗
橋梁結構檢測用空氣耦合雷達數值仿真分析與試驗研究,對于混凝土橋梁而言,其結構內部存在大量密集布置的鋼筋網。為避免鋼筋對雷達信號的干擾,首先采用GPRMAX正演模擬方法,分別對不同的鋼筋間距、不同厚度的鋼筋混凝土保護層、預應力管道等建模,正演分析空氣耦合天線電磁波的傳播特性及衰減特性受這些因素的影響程度,得出空氣耦合探地雷達的探測原理及影響規律,再通過試驗驗證空氣耦合雷達檢測的高效性,如圖1所示。

圖1 空氣耦合雷達檢測示意圖
1.1.2 爬壁機器人吸附方式、運動分析
爬壁機器人機構的主要組成部分為吸附結構和移動機構。通過力學計算分析攀爬效率,最后進入橋梁現場開展檢測試驗,驗證此類無人機系統的有效性、可靠性。
推理公式如式1所示,其中Fs為等效在中心點的吸附力,Fsy為輪子和密封腔體自身所受靜摩擦力阻力之和,G為機器人所受重力。Fz和Fn為壁面對輪子和密封腔的反作用力,且Fs=2Fz+Fn,uy為輪子的摩擦系數,us為滑動密封腔的摩擦系數,L--機器人重心離前后驅動輪的距離,H--機器人重心離參照面的距離。
不同的運動機構驅動方式較大影響預期運動效果,目前常見的有足式、框架式、履帶式和輪式4種運動機構驅動方式,足式和框架式具有較強的越障能力,但存在移動速度慢、設計難度大、負載能力達不到要求的缺陷。履帶式驅動方式相比足式和框架式具有移動速度快,可在凸凹壁面連續行走,且檢測壁面接觸面積大的優點,但存在轉向不靈活,不能檢測預期斷面、復檢缺陷點及時回看等問題。綜合考慮多種因素,確定輪式運動機構設計如圖2所示,配置設計相對簡單,如表1所示,克服了足式、框架式、履帶式運動機構的缺點的同時,保留了自身設計難度低、采集速度快及轉向靈活的優勢,是爬壁機器人橋梁檢測良好的驅動方式。
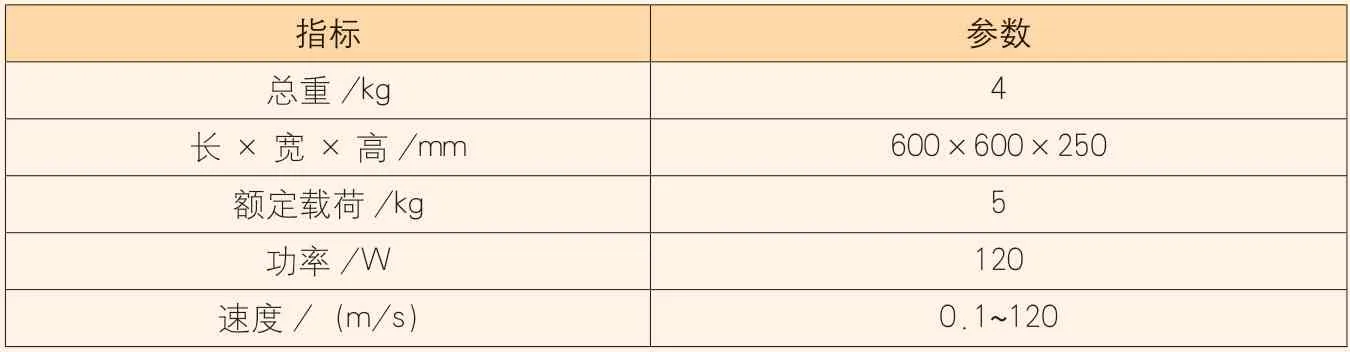
表1 空陸兩棲機器人性能指標

圖2 新型空陸兩棲檢測機器人橋梁檢測示意及現場圖
1.2 總體設計
陸空兩棲機器人主要由主控模塊、外部感知模塊、內部感知模塊、飛行控制模塊和地面控制模塊等組成。
現有的爬行檢測機器人僅能通過貼壁飛行攀爬檢測橋梁結構,而橋梁某些部位如橋墩采用飛行模式檢測效率可能最高,根據橋梁檢測環境的特殊性,本文設計了檢測系統的總體框架,如圖3所示。
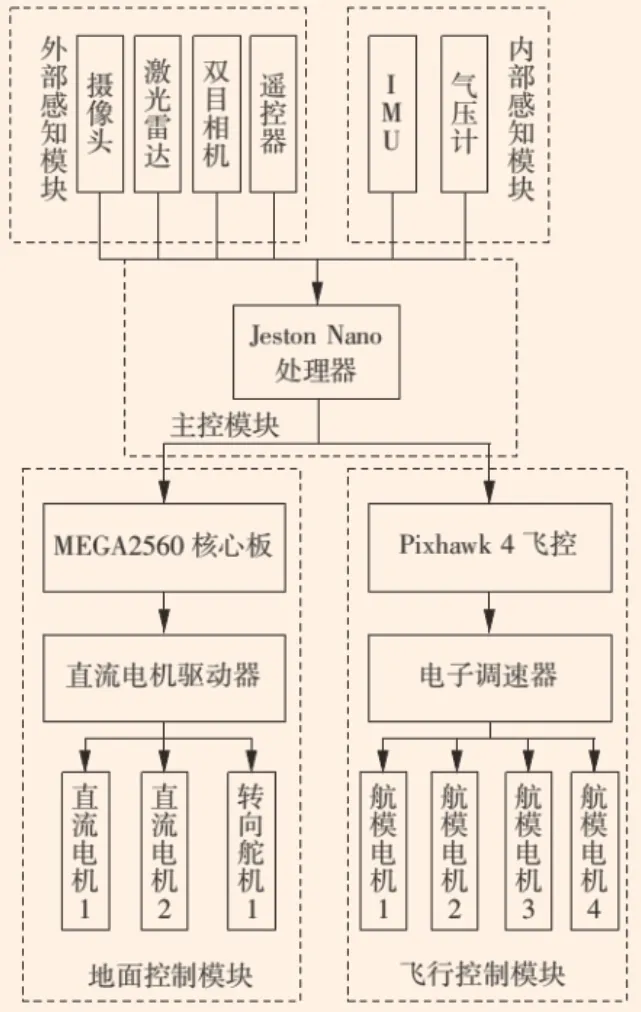
圖3 陸空兩棲機器人總體設計架構
2.1 建立橋梁結構病害檢測模型數據庫
2 橋梁結構檢測系統過程應用
橋梁結構檢測用雷達圖像智能病害識別及預警技術研究雷達圖像的可讀性不佳,在工程實際的復雜環境下信號包含大量噪聲干擾,嚴重影響病害特征信號的提取。針對病害檢測雷達信號特點,提出病害信號特征增強的信號濾波技術,分析病害特征信號與噪聲信號的頻率分布特點,采用小波分析與灰度分析相結合的方式提高信號過濾效果。建立典型病害模型,對比分析不同病害的雷達信號特點,從不同尺度、不同檢測區域多方面建立典型病害信號特征。為提高雷達圖像判定效率,改善判定標準,根據病害信號特征標注樣本圖像,通過卷積神經網絡訓練。利用專業模型的技術優勢,形成針對雷達圖像的圖意解讀與病害類型判斷標準,采取病害發現與分類的智能預警技術,快速抓取雷達圖像中反應病害的特征信號并分析類型,現場形成預警報告,有效減少人為因素的影響,提高效率,建立原始樣本庫、原始案例庫等基礎數據庫。
2.2 搭建基于BIM平臺的橋梁工程質檢融合信息互聯共享系統
工程建設的BIM方案現在已經被越來越多工程建設單位所應用,現有BIM是針對基于工程實施各環節的數據化、數字化、模型化、可視化的構造方案,主要體現的數據是大量構建在施工過程中的相關數據和關聯數據。形成了多個數據源,多個業務系統,多個指標共存的局面,降低了數據利用的效率和各部門協同工作的效率。針對以上在實際業務發展過程中存在的問題,對于BIM模型數據格式實施規范化,形成標準化的系統平臺接口和數據,實現與主流BIM平臺的數據融合與數據聯動。
橋梁質檢數據與BIM平臺數據的融合,實現了兩套系統的數據互聯共享,為工程結構的質量檢測與后續維護提供了高效的監管平臺,也確保了橋梁結構的高質量維護與處治,如表2所示。
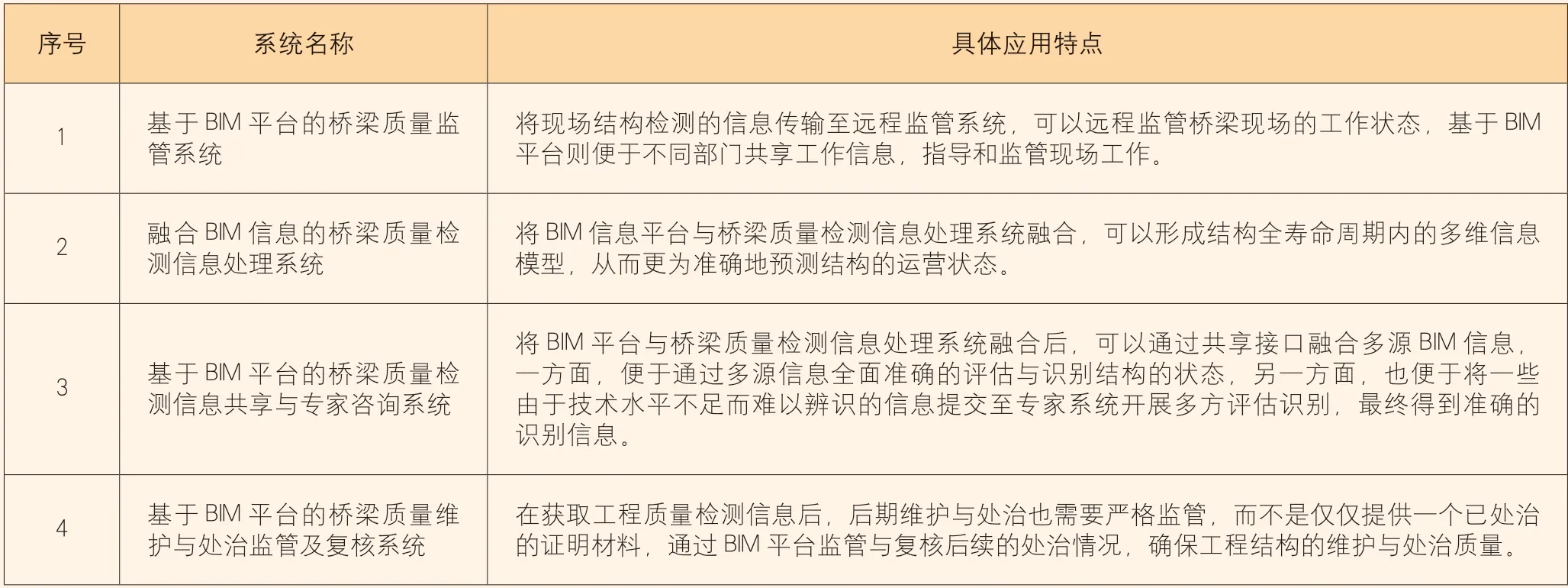
表2 數據互聯共享系統
3 空陸兩棲爬壁機器人橋梁結構檢測系統效果及應用優勢
3.1 系統效果
該系統的硬件平臺主要分為爬壁機器人的硬件組成和視覺檢測裝置的硬件組成。要完成橋梁病害的檢測,首先要使爬壁機器人吸附在橋梁壁面,然后能夠快速在待檢測區域運動采集數據,還能夠快速響應地面操作人員的操作指令實現實時交互,這需要主控板、無線指令模塊、傳感器、無線遙控器等硬件來支撐。對于通過視覺檢測來實現在線識別橋梁病害,需要相應的圖像采集、傳輸、處理與顯示裝置來完成。
3.2 應用優勢
3.2.1 有效提高施工質量
引入大數據測控管理平臺,高效率采集橋梁檢測信息,高精度定位橋梁病害點,高質量針對性處理橋梁檢測病害問題。三階段連續問題處理分別由管理平臺第一時間將質量問題反饋給質量控制操作人員,并全面監督施工質量,大大降低橋梁病害修復的施工質量風險。
3.2.2 有效降低施工成本
嚴格按照施工工藝,大大減少施工過程中的重復工作,從而有效降低施工成本。
3.3.3 加快推進數字化施工
數字化管理拉近施工中各個角色之間的距離,推進扁平化管理。其中,數字化測控詳細記錄橋梁施工過程中關鍵質量數據,施工過程更加精細化;數字化質量分析按照施工標準嚴格評判,助力企業質量施工;智能化反饋調整提高工作效率,有效降低成本。
4 結束語
空陸兩棲爬壁機器人橋梁結構檢測系統通過空陸兩棲機器人搭載空氣耦合雷達,優化適應于橋梁結構檢測的機器人平臺設計,完成橋梁結構混凝土質量安全高效的檢測;系統總結了目前橋梁檢測方法和新型檢測技術的應用,設計了橋梁檢測爬壁機器人系統總體框架,并分析了運動學建模和安全吸附條件,在此基礎上搭建了橋梁檢測數據化管控平臺,實現高質量橋梁檢測。其次,改造機器人結構,從而提高檢測機器人的檢測效率,并確保其安全性。通過力學計算分析此類無人機的攀爬效率,最后驗證此類無人機系統的有效性、可靠性。將BIM信息平臺與工程質量檢測信息處理系統融合,形成結構全壽命周期內的多維信息模型,進而更高效準確檢測結構運營狀態。在獲取橋梁結構質量檢測信息后,通過BIM平臺監管與復核后續的處治情況,確保工程結構的維護與處治質量。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
山東工業技術(2016年15期)2016-12-01 05:31:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產業(2016年3期)2016-05-17 04:32:12
