移動機(jī)器人障礙感知的應(yīng)用研究分析
2023-10-07 08:24:56黃振華肖銀寶
科技風(fēng) 2023年27期
黃振華 肖銀寶
1.佛山科學(xué)技術(shù)學(xué)院機(jī)電工程與自動化學(xué)院 廣東佛山 528225;2.嵩明縣科學(xué)技術(shù)和工業(yè)信息化局 云南昆明 650000
1 概述
移動機(jī)器人對周圍環(huán)境的感知與局部的路徑規(guī)劃也成為當(dāng)今研究與應(yīng)用領(lǐng)域的一大熱點問題,無論是學(xué)校還是企業(yè)都在深耕這一塊技術(shù)。自主移動機(jī)器人對于周邊環(huán)境的精確感知也是局部路徑規(guī)劃的重要前提[1],自主移動機(jī)器人對所處環(huán)境的理解程度決定了其自主完成運(yùn)動規(guī)劃等任務(wù)的可能性,尤其在具有隨機(jī)性和復(fù)雜性的環(huán)境。為了更好地理解室內(nèi)外場景,提高機(jī)器人對環(huán)境的感知能力是一個有效途徑。
自主移動機(jī)器人所配備的激光、深度視覺等外部傳感器是其獲取場景信息感知外部環(huán)境的主要途徑[2]。激光傳感器可以快速準(zhǔn)確地獲得場景的深度信息,利用三維激光測距傳感器獲取原始三維激光點云描述室外場景。將激光點擬合成平面描述環(huán)境,利用平面參數(shù)的變化修正自主移動平臺的位姿,并實現(xiàn)三維環(huán)境導(dǎo)航。由于激光傳感器缺乏顏色和紋理信息,對環(huán)境描述不全面,應(yīng)用于復(fù)雜室外環(huán)境時會出現(xiàn)漏報和誤報現(xiàn)象,給自主機(jī)器人的安全運(yùn)行帶來威脅[3]。

圖1 雷達(dá)盲區(qū)情境
針對上述情況,嘗試提出將激光信息和圖像信息相融合的感知方式,利用視覺傳感器獲取的豐富物體或場景信息來彌補(bǔ)激光傳感器的不足,從而增強(qiáng)物體或場景表達(dá)與信息[4]。深度視覺傳感器則可以粗略地獲得更豐富的外部場景信息,其常用于描述更豐富的場景。因此,在獲得良好外界感知信息的條件下,可更好地為路徑規(guī)劃計算部分做好鋪墊,才能更高質(zhì)量地研究并改進(jìn)下一層的路徑規(guī)劃算法。
2 研究方案
基于現(xiàn)有Turtlebot3移動平臺無法進(jìn)行局部三維障礙規(guī)避和粗糙地形下最優(yōu)路徑可達(dá)性規(guī)劃問題出發(fā),設(shè)計出用于移動平臺粗糙地形下局部障礙感知與路徑規(guī)劃系統(tǒng)。
該系統(tǒng)能夠通過測距傳感器獲取移動機(jī)器人前方一定距離環(huán)境點云信息,并將其和機(jī)器人的姿態(tài)估計融合構(gòu)建出局部概率高程圖。通過將高程圖中一些障礙物和地形的幾何信息抽象為可達(dá)性地圖,再根據(jù)移動機(jī)器人的運(yùn)動學(xué)性能和人為的約束條件結(jié)合可達(dá)性地圖規(guī)劃出一條可達(dá)性最高的路徑,使得移動機(jī)器人在跟隨全局規(guī)劃器的路徑同時做出平滑的局部避障動作。
上述研究方案可拆分為以下兩大研究內(nèi)容:
(1)地形與地面障礙物的柵格化高程地圖表示的研究。通過移動平臺搭載的距離測量傳感器感知前方地形與地面障礙物,并通過處理傳感器測量不確定性和位姿協(xié)方差矩陣來形式化高程映射框架,最后在柵格地圖上實現(xiàn)移動平臺局部概率地形高程圖。
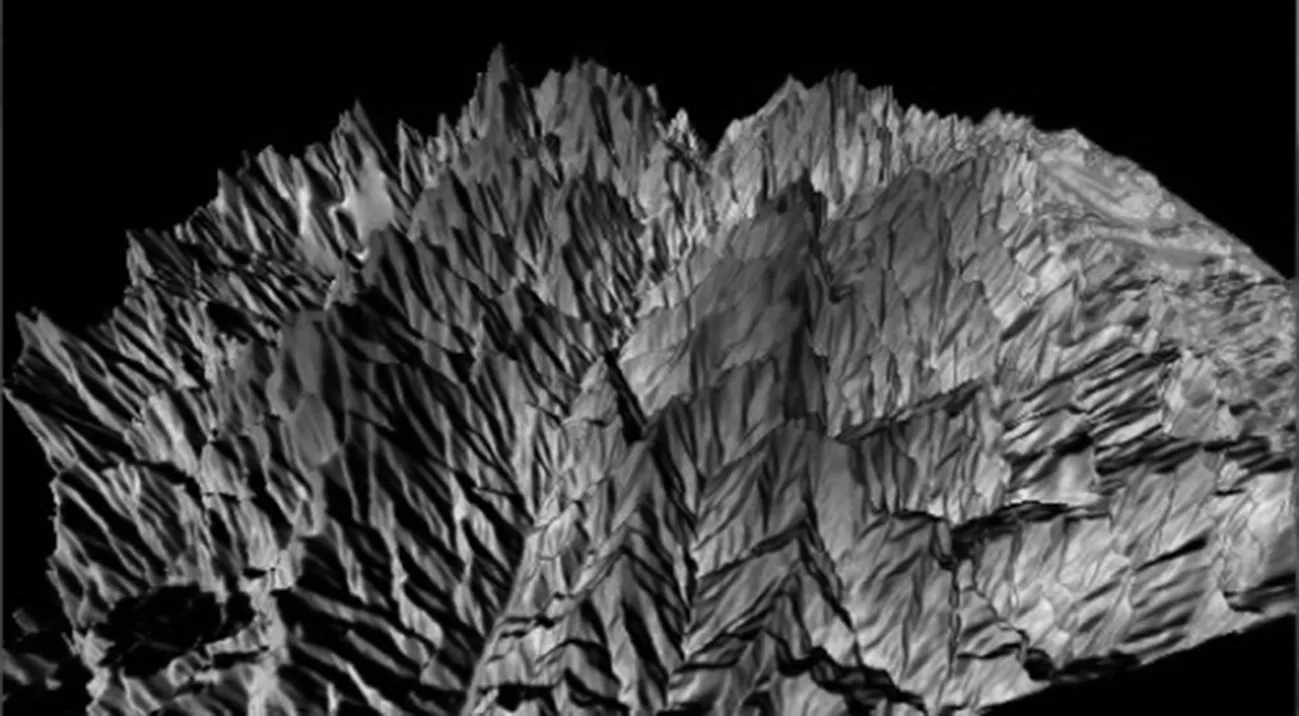
圖2 高程圖
(2)基于可達(dá)性地圖的局部避障與路徑規(guī)劃的研究。結(jié)合移動平臺的運(yùn)動學(xué)性能、概率地形高程圖和一些人為的約束條件設(shè)計一套局部路徑規(guī)劃器,使得移動平臺能在粗糙地形下實現(xiàn)流暢的動態(tài)避障功能,并能夠平滑地跟隨全局規(guī)劃器規(guī)劃出來的路徑。
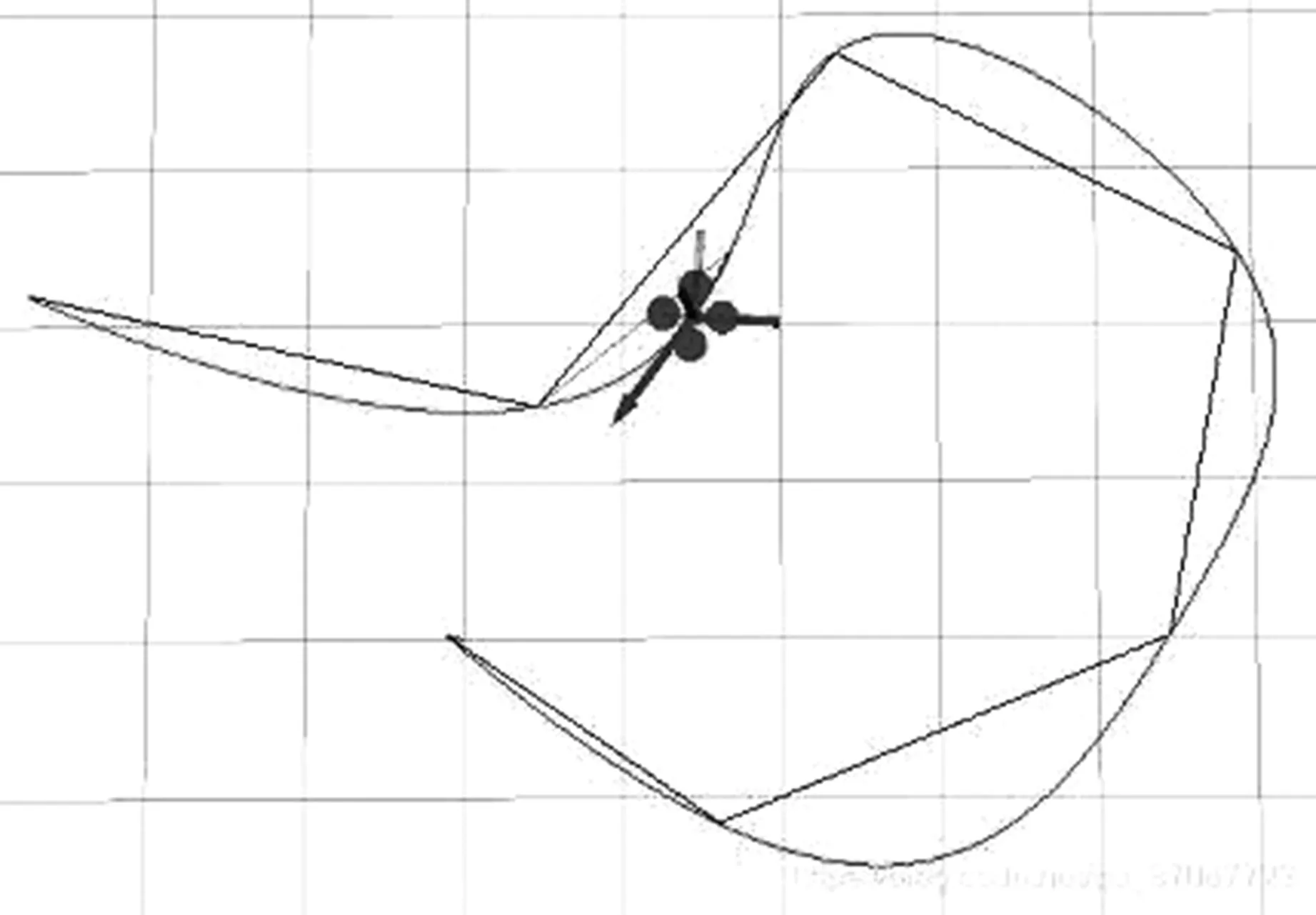
圖3 路徑規(guī)劃圖
3 技術(shù)步驟及路線
根據(jù)上述研究內(nèi)容可擬定以下技術(shù)步驟和路線:
(1)以機(jī)器人為中心構(gòu)建概率高程圖。通過測距傳感器獲取移動機(jī)器人前方一定距離障礙物與地形信息,以移動平臺為中心進(jìn)行高程圖的映射。映射出的每個單元格中存儲了坐標(biāo)、高度和方差信息。始終保持相對于移動平臺進(jìn)行距離測量,當(dāng)機(jī)器人移動時,根據(jù)位姿估計不確定性的增量以及周圍單元的估計值來更新每個單元的方差和均值,對局部不確定性和相鄰單元格的處理用以估計高程圖置信區(qū)域的上限和下限[5]。在任何時候,以移動平臺為中心的高程圖是從局部角度對地形的估計。一方面,前方的區(qū)域通常具有較高的精度,因為它通過平臺前方的測距傳感器的新測量值不斷更新。另一方面,由于以移動平臺相對位姿估計漂移,在傳感器的視野之外(移動平臺的下方或后方)的區(qū)域?qū)p少可信度概率。

圖4 概率高程圖
(2)基于概率高程圖的可達(dá)性地圖的構(gòu)建。在獲得高程圖的數(shù)據(jù)之后,就需要相對應(yīng)地建立可達(dá)性地圖。可達(dá)性地圖使用與高程圖相同的網(wǎng)格形式,它在局部描述了基于三種不同地形特征的目標(biāo)路徑可達(dá)性,分別為局部坡度、局部地形粗糙度和局部垂直高度。使用單元格周圍的圓形區(qū)域來計算網(wǎng)格中每個單元格的局部坡度、局部地形平整度和局部垂直高度的值,并且這些圓形的區(qū)域應(yīng)該在傳感器精度允許的范圍內(nèi)盡可能地小。通過對于這三種不同地形特征的分析,基本可以將移動平臺運(yùn)行環(huán)境中的幾種常見障礙環(huán)境描述清楚,如地面上的斜坡、非規(guī)則形狀獨(dú)立障礙物、垂直的階梯和地面坑洼等。
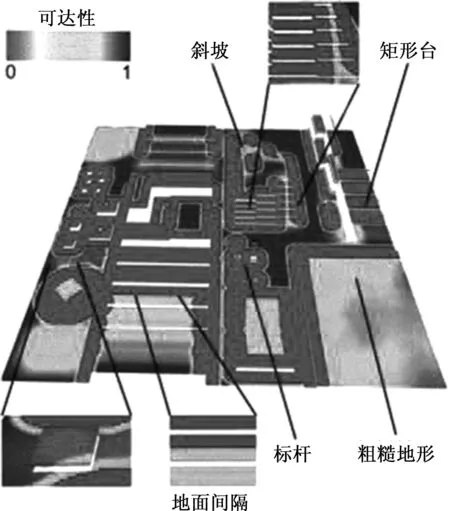
圖5 可達(dá)性地圖
(3)基于可達(dá)性地圖與移動平臺運(yùn)動學(xué)性能的局部路徑規(guī)劃器的設(shè)計。局部路徑規(guī)劃器的目的就是在能夠跟隨全局路徑規(guī)劃器的全局最優(yōu)路徑的同時,在移動機(jī)器人的局部范圍內(nèi)對一些新增障礙與動態(tài)障礙做出一系列的規(guī)避動作,并在考慮機(jī)器人運(yùn)動學(xué)性能的情況下局部修正和平滑全局規(guī)劃器的軌跡。因此需要針對機(jī)器人的足跡模型設(shè)計成本函數(shù),路徑規(guī)劃器計算出具有高可達(dá)性且短而平滑的目標(biāo)路徑并反映在成本函數(shù)中,最終計算出一條可達(dá)性最高且成本最低的路徑作為跟隨全局路徑方向的局部路徑,并作為移動機(jī)器人當(dāng)前行駛的軌跡[6]。
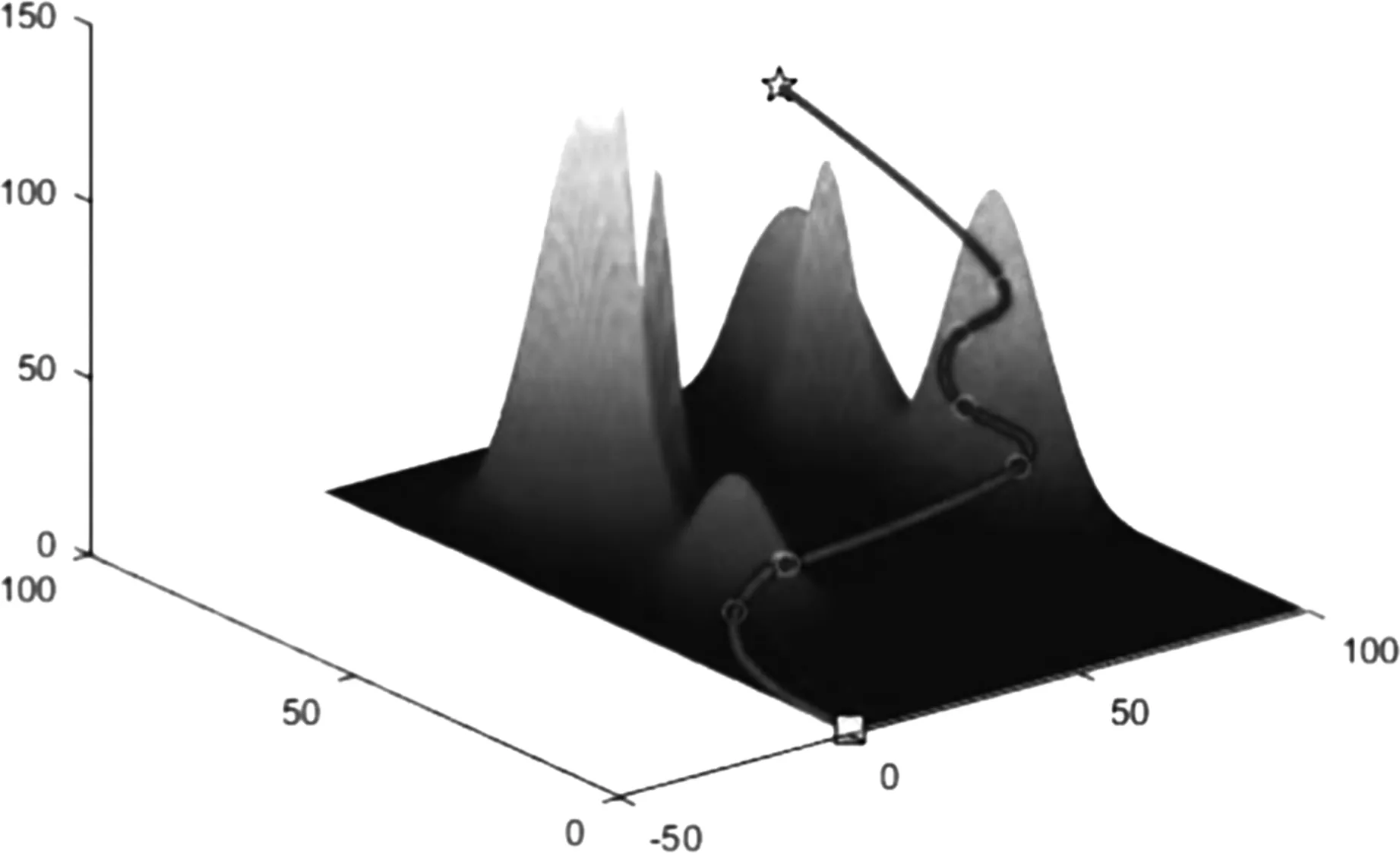
圖6 規(guī)劃器路徑規(guī)劃效果
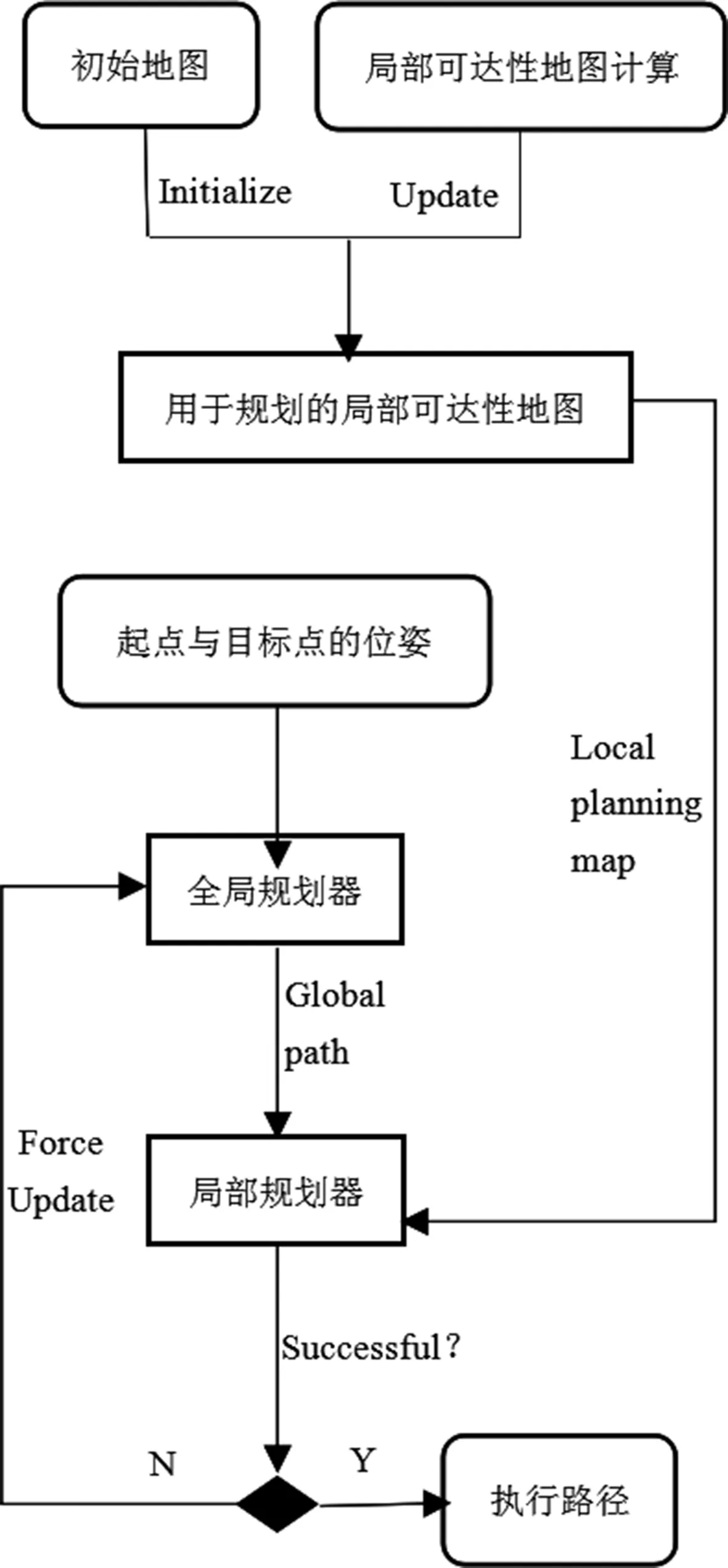
圖7 技術(shù)路線圖
4 分析總結(jié)
本課題主要研究智能制造領(lǐng)域移動機(jī)器人障礙感知與路徑規(guī)劃技術(shù),預(yù)期提出并建立一套基于Turtlebot3平臺的局部障礙感知與避障方案。
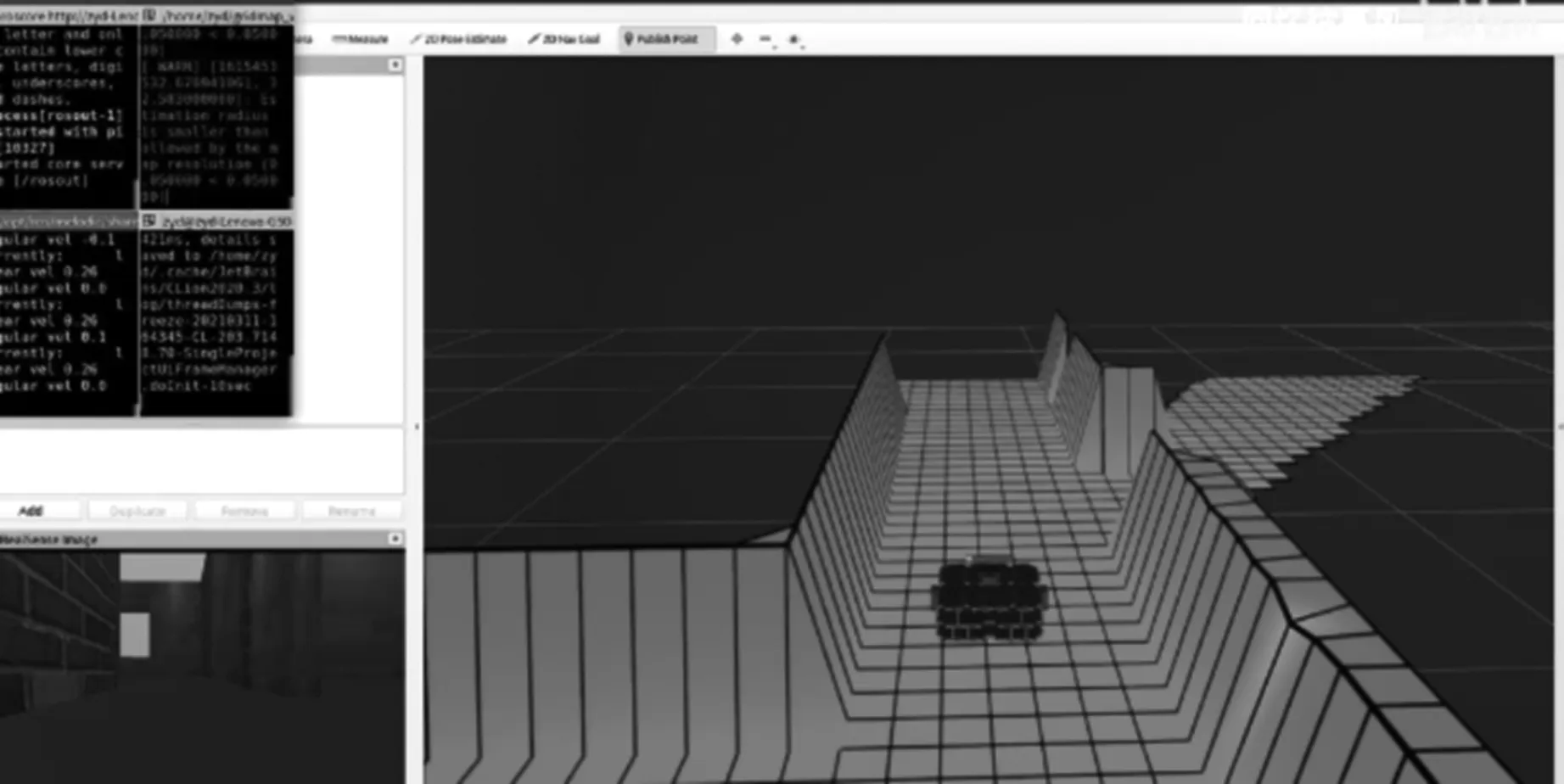
圖8 仿真效果圖
主要創(chuàng)新點:
(1)區(qū)別于以往對于三維空間障礙物直接投影壓縮到二維平面的表示方法[7],本設(shè)計使用基于柵格的概率高程圖表示地形與障礙物,使得高度可見,能夠清晰地區(qū)分可越過障礙與不可越過障礙,使其后期規(guī)劃算法的可操作性更大。
(2)可達(dá)性地圖結(jié)合了障礙物中的一些幾何特征信息、移動平臺的足跡模型和部分運(yùn)動學(xué)性能,大大提高了路徑規(guī)劃時的運(yùn)動表現(xiàn)[8]。后期還可以考慮優(yōu)化軌跡的規(guī)劃,使得移動平臺的運(yùn)動更具人性化。
(3)對于地面移動機(jī)器人,基于高程圖所設(shè)計的路徑規(guī)劃算法比基于二維柵格地圖的路徑規(guī)劃算法有著針對高度障礙物的避障優(yōu)勢,同時又少了使用八叉樹地圖做三維路徑規(guī)劃中必須要搜索每一個分支子節(jié)點的大量計算[9],是一種對于實際應(yīng)用來說性價比較高的方案。
(4)基于現(xiàn)有總結(jié)的路徑規(guī)劃算法的基礎(chǔ)上,分析總結(jié)其獨(dú)有的算法優(yōu)劣性和適用的使用場景,最后根據(jù)得出的數(shù)據(jù)設(shè)計出一種針對復(fù)雜環(huán)境場景的規(guī)劃器,該規(guī)劃器主要在計算效率、路程最短和軌跡平滑三方面進(jìn)行關(guān)鍵改進(jìn)和優(yōu)化[10]。
猜你喜歡
北京航空航天大學(xué)學(xué)報(2022年6期)2022-07-02 01:59:12
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:21
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中國海洋大學(xué)學(xué)報(自然科學(xué)版)(2014年8期)2014-02-28 12:21:31
中國海洋大學(xué)學(xué)報(自然科學(xué)版)(2014年7期)2014-02-28 12:21:19
