基于剛柔耦合多體動力學仿真分析的推拉器設計研究
2023-10-09 10:36:32陳春梅安徽合力股份有限公司
安徽科技 2023年9期
關鍵詞:模型
文/陳春梅(安徽合力股份有限公司)
文/陳春梅(安徽合力股份有限公司)
一、引言
無論是在倉庫、廠內,還是在建筑工地上,到處可見叉車的身影。叉車是工業領域應用最廣泛的機械設備之一,大量的貨物搬運工作都需要應用叉車。傳統的叉車進行作業時,一般都是將貨物放在托盤上,如圖1 所示,然后通過貨叉對托盤進行叉取完成搬運堆垛作業,作業對象下面都要放置托盤,且托盤的厚度必須大于貨叉的厚度。這么厚的托盤會導致很大的空間浪費,特別是對于某些空間受限的場所,例如使用集裝箱海運貨物,集裝箱運輸大多是按照所占用的集裝箱體積來收取運費的,于是客戶就得為這些托盤占用的空間資源買單。而無須托盤作業的叉車屬具——推拉器,如圖2 所示,則很好地解決了這一問題。

圖1 叉車帶托盤作業
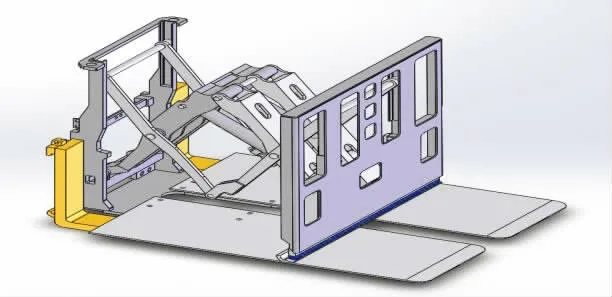
圖2 推拉器結構
本文將對推拉器的結構原理進行分析,并采用多體動力學仿真分析方法驗證其結構的合理性和可靠性。
二、推拉器的結構分析
推拉器是一個多連桿機構組成的復雜系統,其推出和拉回的狀態分別如圖3、圖4 所示,俯視角度下的結構如圖5 所示。此推拉器結構布置緊湊,主要由導軌槽、連接桿、支座總成、主動臂、下滑塊、拔銷、左右推拉油缸、底板、叉板、導軌槽、前推板總成、左右升降油缸、鉤板總成、壓板總成、導向套、導向軸等零部件裝配而成。
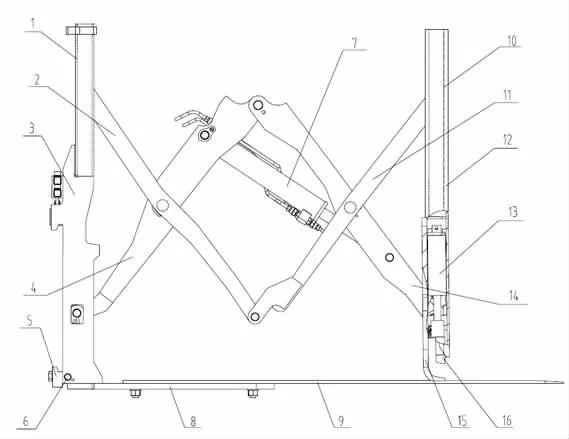
圖3 推拉器推出后示意圖
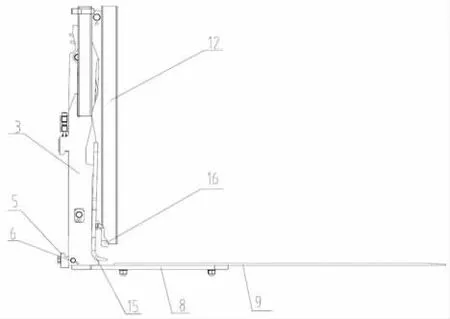
圖4 推拉器拉回后示意圖
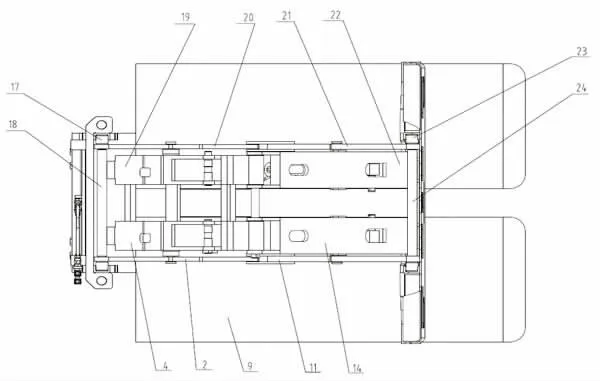
圖5 推拉器的俯視圖
具體布置為:該推拉器共有4 根油缸,包括左右2根推拉油缸7 和左右2 根升降油缸13。推拉油缸7 的作用是實現主動臂和連接桿的張開合攏工作,從而帶動前推板總成12 和貨物實現推拉動作;左右升降油缸13 的作用是為了實現壓板總成16 的升降功能,滑紙板進入壓板和鉤板之間,壓板就下壓,滑紙板就會被壓板和鉤板夾住,壓板提起,滑紙板仍在壓板和鉤板之間,只是壓板將滑紙板松開,這樣滑紙板和貨物就可以被前后推拉操作。
中間部位的連接為:后主動臂右4 與前主動臂右14 以及后主動臂左19 與前主動臂左22 的上端共通過一根銷軸連接在一起;后連接桿右2 與后主動臂右4 的中部通過銷軸連接;前連接桿右11 與前主動臂右14 的中部通過銷軸連接;前連接桿右11 與后連接桿右2 的下端通過銷軸連接;左邊同樣的道理,前連接桿左21 與前主動臂左22 的中部通過銷軸連接;前連接桿左21 與后連接桿左20 的下端通過銷軸連接在一起;然后后連接桿右2 與后連接桿左20 之間通過導向軸18 連接在一起,前連接桿右11 與前連接桿左21 之間通過導向軸24 連接在一起,導向軸18 和24兩端安裝有導向軸套23,導向軸套23 可在導軌槽1和10 中上下運動。后主動臂右4、后主動臂左19 的下端分別固定在支座總成3 上,上下可以轉動,前主動臂右14 和前主動臂左22 的下端分別固定在前推板總成12 上,上下可以轉動。
推拉油缸右安裝在后主動臂右4 與前主動臂右14 之間,推拉油缸左安裝在后主動臂左19 與前主動臂左22 之間,左右推拉油缸7 對稱布置;左右升降油缸13 對稱布置在前推板總成12 與壓板總成16 之間,隱蔽性好,可以很好地保護油缸管路,從而延長其使用壽命。
叉板9 通過螺栓固定在支座總成3 上的底板8上;鉤板總成15 固定在前推板總成12 上。
下滑塊5 通過拔銷6 固定在支座總成3 的下部,拔銷6 可輕松拔下或插入,實現推拉器的快裝式功能。
整個推拉器使用時,上滑塊直接掛裝在叉車的貨叉架上,通過下滑塊5 的拔銷6 固定,拆裝非常方便。
三、采用剛柔耦合多體動力學仿真分析
本次選擇LMS 仿真平臺。
推拉器的工作過程是一個動態的過程,校核計算時難以確定最危險工況,用基于靜力學的有限元分析方法很難計算校核,因此采用了多體動力學計算推拉器在典型工況下的動力響應。
首先將solidworks 建立的三維模型導入到VL.motion 軟件界面中,如圖6 所示。然后將固定的零部件,如叉板、支座總成等與大地連接,可以運動的主動臂、連接桿、推板等轉換成構件,進而添加約束、驅動、外力等,設置成自己想要的工況,約束方面是通過設置運動副來表現推拉器實際的約束關系;旋轉副(前后主動臂鉸接的位置都設置有旋轉副),接觸力(導向套和導軌的連接設置成接觸力),圓柱副(推拉油缸缸筒和活塞桿之間設置成圓柱副),(運動副的創建是通過選擇構件上的一些幾何點、線、面元素來完成的。驅動是通過建立一條常用的正弦曲線,定義推拉油缸運動位移過程,通過推拉油缸的伸縮來實現貨物的推出和拉回。添加外力是為了讓多剛體動力學模型更完善,此推拉器添加的外力取決于負載,考慮前推板總成在推拉貨物過程中所受的推力。這樣,推拉器的多剛體動力學模型就建立好了,如圖6 所示。
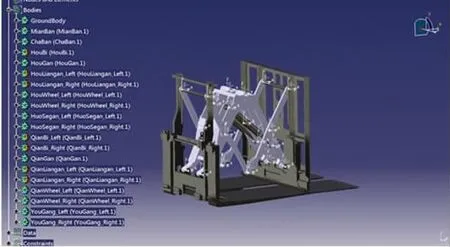
圖6 推拉器的多剛體動力學模型
由于桿系零件存在變形,用多剛體動力學方法進行仿真計算時,由于不計各構件的彈性變形,造成的計算結果誤差較大,難以獲得滿意的仿真結果。因此,運用了基于模態綜合法的剛柔耦合多體動力學對推拉器進行仿真計算。
進行剛柔耦合多體動力學仿真分析,首先建立剛柔耦合模型,建立主動臂等的有限元模型,并替換掉它的剛性體模型,如圖7 所示。
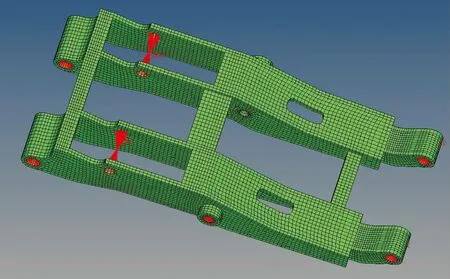
圖7 主動臂的有限元模型
形成推拉器的剛柔耦合模型,如圖8 所示。
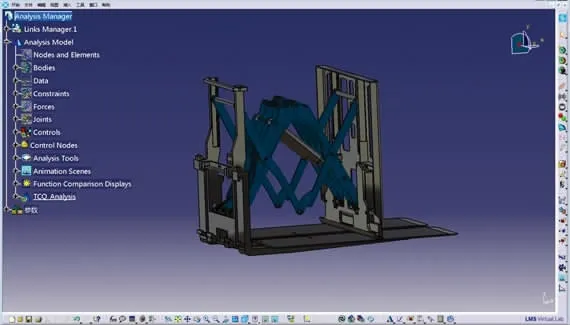
圖8推拉器的剛柔耦合模型
然后將柔性化的零部件進行模態計算,這樣就形成了含有模態信息的剛柔耦合模型,如圖9 所示。
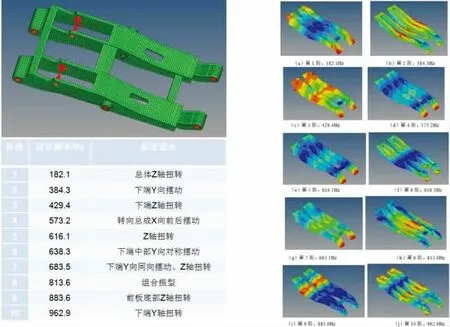
圖9 含有模態信息的剛柔耦合模型
進行多體動力學仿真,設置仿真時間為8 秒,采樣步長為0.0001 秒。假設工況為:0~1 秒為推拉器空載從叉板某一位置拉回到叉板根部的過程;1~6 秒為推拉器帶載整個推出過程;6~8 秒為推拉器空載從叉板末端拉回到叉板某一位置的過程。求解完成,可以查看推拉器在推拉過程中的動態響應情況,如圖10 所示為輸出了推拉器的前推板速度曲線圖和前后主動臂鉸點力曲線圖。
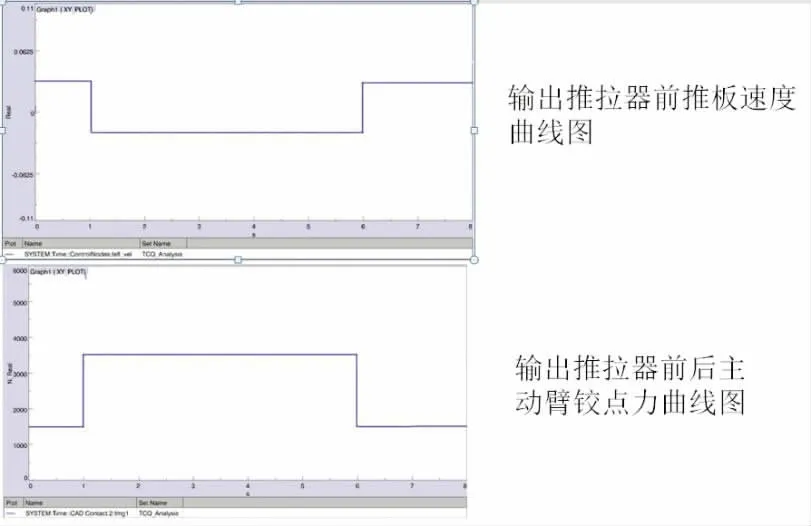
圖10 推拉器前推板曲線圖
從所輸出的推拉器前推板速度和前后主動臂鉸點力來判斷,此推拉器的運行是否正常,參數是否滿足客戶需求,整個產品結構設計的合理性,并可以根據仿真結果不斷對模型進行修正,從而在設計階段得到我們想要的產品。
四、結語
通過將多體動力學分析方法融入到產品設計中,可以讓設計人員在樣機生產之前,利用計算機對處于概念階段的產品進行仿真,有針對性或者全面地模擬機械系統的各種運行工況,提前對模型進行修正,能在很大程度上降低開發成本、縮短開發周期。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19