基于北斗衛星導航系統的地下車庫深基坑沉降監測與分析
2023-10-10 14:35:16張繼文于永堂徐傳召王競革
測繪通報 2023年9期
黃 鑫,張繼文,于永堂,3,徐傳召,張 率,曾 濤,王競革
(1.西安建筑科技大學土木工程學院,陜西 西安 710055; 2.機械工業勘察設計研究院有限公司陜西省特殊巖土性質與處理重點實驗室,陜西 西安 710021; 3.中聯西北工程設計研究院有限公司,陜西 西安 710077)
地下空間開發利用已成為我國城市建設和城市更新的重要組成部分,并呈現出大規模、高速度、多層次和多類別的發展趨勢。豎井式地下車庫具有占地面積小、土地利用率高等優勢,適用于解決城區停車難的問題,也符合城市地下空間開發利用的要求。但豎井式地下車庫同時具有小面積開挖、大深度掘進的工程特點,在施工過程中會產生較大深基坑,存在垮塌、周邊沉降等安全隱患[1-2]。為了保障建筑物施工過程中深基坑本身及周圍建構筑物的安全,需要對深基坑周邊的地表沉降進行持續監測。目前,地表變形監測多采用常規大地水準測量方法,主要包括三角測量[3]、幾何水準測量[4]和交會測量[5]等方法。該類方法的主要特征是理論和方法成熟,監測費用相對較低,但存在監測歷時長、勞動強度高、不能實現自動化監測、無法及時進行風險預警等缺點。基于BDS(BeiDou Navigation Satellite System)采用載波相位差分定位技術開發的變形監測系統(BDS變形監測系統)具有全天候運行、數據采集頻率高、自動化程度高、布測區域廣的特點[6-7],能有效彌補人工水準監測的不足,已被應用于邊坡變形監測[8-9]、高填方地表變形監測[10-11]及其他變形監測工程[12-14]。目前國內關于北斗變形監測技術的應用研究主要是針對范圍寬廣、無遮擋、施工完成后工程場地的變形監測,而對范圍狹窄、有遮擋、施工過程中的場地變形監測研究鮮有報道,后者受施工環境的干擾大,其適用性與監測效果尚缺乏定量評估。
本文利用BDS變形監測系統對西安市東郊某地下立體車庫施工及工后期的沉降變形進行持續監測,利用小波降噪方法對原始數據進行降噪處理,分析BDS變形監測系統監測值與水準監測值的相對誤差情況,并對該場地的最終沉降量進行預測,以期為BDS變形監測系統的工程應用提供參考。
1 BDS變形監測系統概況
1.1 系統組成
BDS變形監測系統由硬件系統和服務器軟件兩部分組成。
1.1.1 硬件系統
硬件系統的框架如圖1所示,主要包含6個功能模塊:數據采集與解析模塊、三維坐標解算模塊、北斗接收板模塊、電源模塊、無線通信模塊。
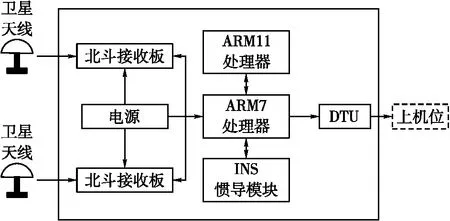
圖1 嵌入式硬件系統設計
(1)數據采集與解析模塊:采用ARM7處理器,負責對采集到的定位信息、載波相位監測值及北斗導航衛星的位置信息進行解析,并傳送給三維坐標解算模塊及無線通信模塊。
(2)三維坐標解算模塊:采用ARM11處理器,主要運行北斗差分定位核心算法,實時解算載體的三維坐標。
(3)北斗接收板模塊:采用射頻和基帶一體化的SOC芯片型導航高精度衛星信號處理模塊(司南導航K706板卡),負責接收、處理北斗衛星監測數據。
(4)電源模塊:采用5~8 V供電,使用的電源芯片為TPS54383芯片,負責為整個系統提供穩定的電源。
(5)無線通信模塊:采用的是眾山ZSD14104GDTU,負責將三維坐標解算模塊解算的坐標數據通過GPRS無線網絡發送到上位機。
1.1.2 服務器軟件
服務器軟件是一個可視化的遠程監測平臺,一方面能動態顯示接收到的RTK定位結果,另一方面能通過大量的原始數據進行靜態相對定位解算。主要功能包括CSocket網絡通信、動態數據解析、靜態數據解算、MySQL數據庫存儲、監測站變形監測信息等模塊,可實現對原始數據的記錄、查詢等功能,實現對監測數據的高效管理、分析和處理。
1.2 定位解算方法
(1)雙差監測方程的建立。如圖2所示,假設安置在基準站和監測站的兩個北斗接收機于t1歷元和t2歷元分別對衛星P、Q、M、N進行同步監測,則可以得到t1歷元和t2歷元各8個獨立的載波相位監測值,對應8個載波監測方程式,對8個方程式進行兩次作差可得載波相位雙差監測方程式。
(2)模糊度浮點解的求解。各種利用載波監測值的隨機誤差均由模糊度、基線向量或位置等其他因素組成,假設隨機誤差服從正態分布,利用最小二乘法即可得各未知數在實數域的最優估值,此解即為浮點解。
(3)固定雙差整周模糊度。利用整數最小二乘法與LAMBDA結合的方法尋找模糊度整數解候選值,并對模糊度整數解候選值進行確認檢驗,得到定位未知數的整數解。
(4)靜態定位解算。求解出精確的基線矢量,并結合基準站的已知坐標得到監測站的高精度坐標。
2 深基坑沉降監測
2.1 工程概況及監測點位布設
本次利用BDS變形監測系統對西安市東郊某地下車庫深基坑工程的地表沉降變形進行了持續監測。該地下車庫圓形深基坑的設計直徑為18.9 m,深度為8.7 m,車庫主體頂部距離地表約0.9 m。工程場地的原始地貌屬于渭河一級階地,場區主要地層自上而下分別為:0.0~0.9 m為素填土;0.9~4.8 m為黃土狀土;4.8~5.7 m為粉土;5.7~9.0 m為黃土;9.0~20.0 m均為中砂。為獲得地表累計沉降量,在基坑頂部邊緣地表設置了4個BDS監測站(B1—B4),每個監測站均相隔一個車位,且在每個車庫頂部及車庫周邊地表設置了水準監測點位(S1—S19),其中S1、S3、S5、S7分別與4個北斗監測站位置對應,監測點位布設如圖3所示。

圖3 監測點布設
2.2 監測數據分析
本次監測時間為2022年6月20日至9月1日,共計73 d,原始監測數據如圖4所示。
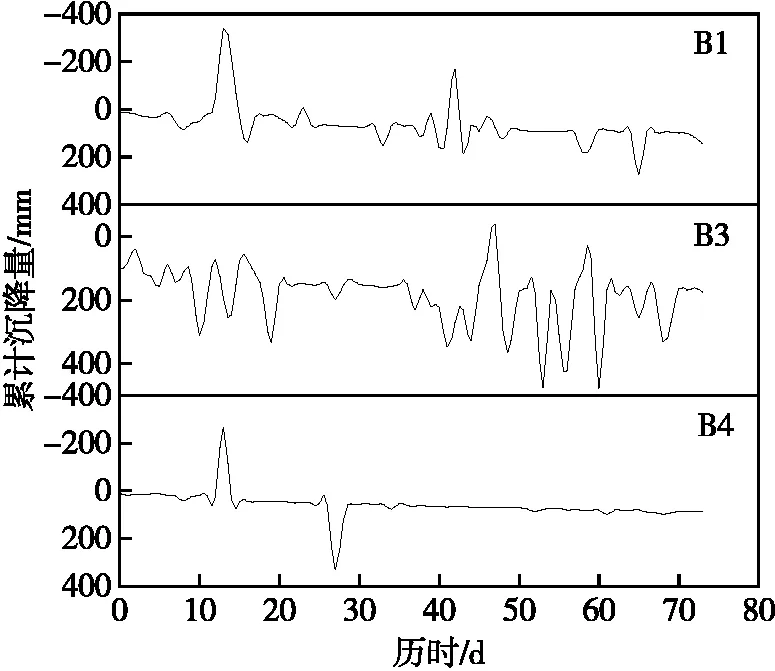
圖4 累計沉降監測數據
由圖4可知,場地累計沉降量隨著時間增長而持續增大,監測歷時內,B1、B3、B4的累計沉降量分別為101、95.9、89.6 mm,沉降速率分別為0.6、14.3、1.5 mm/d,均未達到穩定狀態。由于本次施工場地較為狹窄,施工影響較大,導致B1、B3、B4監測數據均含有噪聲,B2監測數據缺失。
3 監測數據降噪處理
根據各測點處監測曲線的走勢來看,雖然累計沉降隨時間推移大體呈現增長趨勢,但由于施工干擾較大,導致監測數據出現較大波動性,難以準確預測最終沉降量,因此需要采用小波降噪法對監測數據進行降噪處理[15]。
3.1 小波降噪原理
小波降噪的原理與步驟如圖5所示。首先選定一種小波基函數,對信號進行N層分解,然后對分解得到的各層系數選擇一個閾值,并對細節系數作用軟閾值處理,最后對降噪處理后的系數通過小波重建得到降噪后的監測信號。

圖5 小波降噪原理與步驟
在進行小波降噪時,假設含噪聲監測數據數學模型為
Si=S′i+eii=1,2,…,n
(1)
式中,Si為第i期的變形監測數據,它包括真實變形量和確定性噪聲;S′i為真實變形量;ei為隨機噪聲。
此次數據處理利用Matlab中的wavelet工具箱實現具體操作,圖5(b)中S表示原始信號,即原始監測數據,此次將原始信號進行5層小波分解,d1~d5分別表示第1~5層分解后的高頻信號,a5表示經過5層小波分解后的低頻信號,即為有效信息。
3.2 降噪誤差評價指標
(1)均方根誤差(RMSE)。經過小波降噪后數據和原始數據的均方誤差,表達式為
(2)
式中,i=1,2,…,n,為監測期數;Si為原始監測數據;S′i為小波去噪后的監測數據。RMSE值越小表示去噪效果越好。
(2)信噪比(SNR)。信噪比是指信號值和噪聲值的比值,比值越高去噪效果越好,表達式為[16]
(3)
式中,Ps、Pn分別表示信號值和噪聲值的有效功率。可表示為
(4)
(5)
3.3 不同基函數降噪效果對比
本次分別利用Daubechies、Symlet、Biorthogonal基函數對原始監測數據進行小波降噪分析,得到降噪前后監測數據的對比,如圖6所示,降噪效果評價指標見表1。
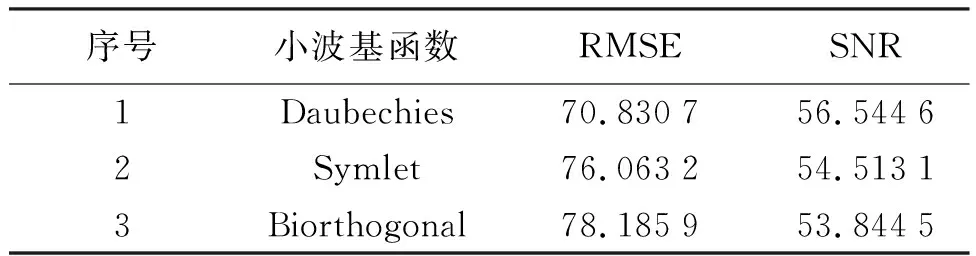
表1 不同基函數降噪誤差分析
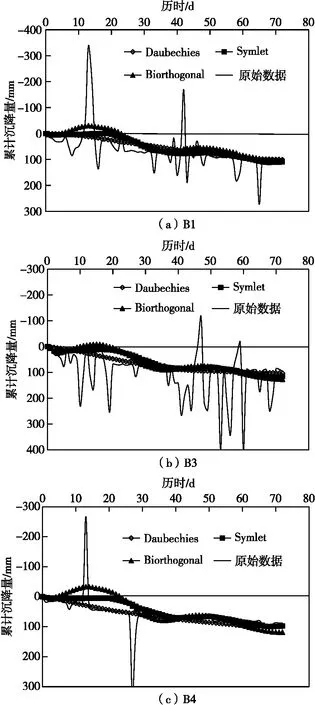
圖6 監測數據降噪前后對比
由圖6、表1可知,3種分析方法均在很大程度上篩除了原始數據中的噪聲信息,處理后的沉降監測曲線走勢與原始數據基本一致。其中,Daubechies方法降噪處理后的數據與原數據的均方根誤差最小,信噪比最大。
3.4 BDS變形監測系統與水準監測數據的對比分析
經Daubechies方法降噪處理后的BDS變形監測系統監測數據與水準監測數據對比如圖7所示,兩者相對誤差情況如圖8所示。
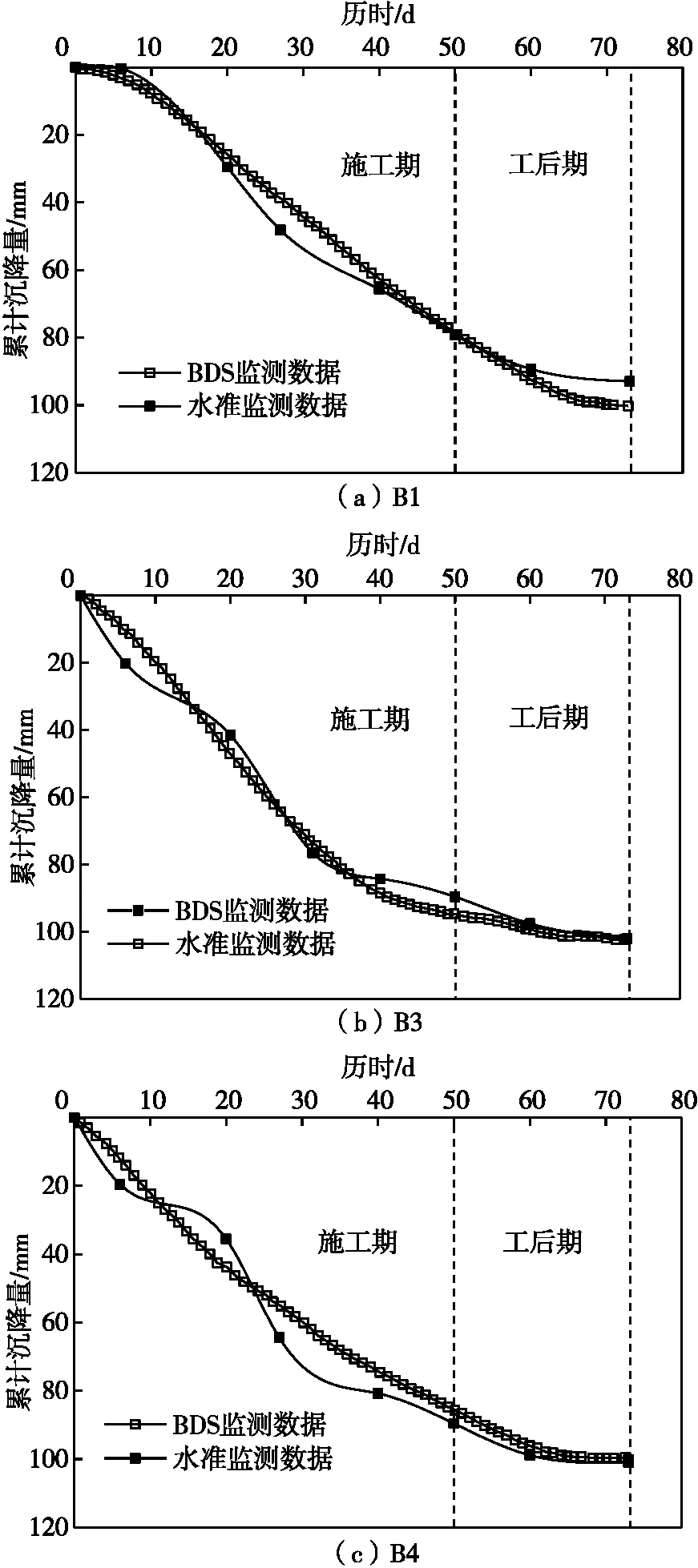
圖7 BDS監測值與水準監測值對比
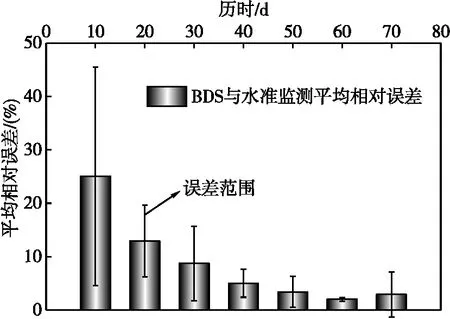
圖8 BDS與水準監測值誤差情況
由圖7—圖8可知,兩種監測方式均能夠反映出地下車庫的沉降變化特征,但水準監測法在73 d的監測期內僅采集到了7期地表沉降數據,最大的監測時間間隔為14 d,監測數據完整性較差。BDS變形監測系統為24 h自動化連續監測,監測數據完整性較好,監測曲線較為連續平滑,與水準監測數據的平均誤差在5.5%~10.3%以內,其中施工期的相對誤差在7.1%~16.2%之間,施工結束后,兩者的相對誤差減小至2.5%~3.4%。
4 最終沉降量預測
4.1 沉降曲線特征分析
本次工后沉降監測數據共歷時17 d,工后沉降監測數據及沉降速率變化規律如圖9所示。
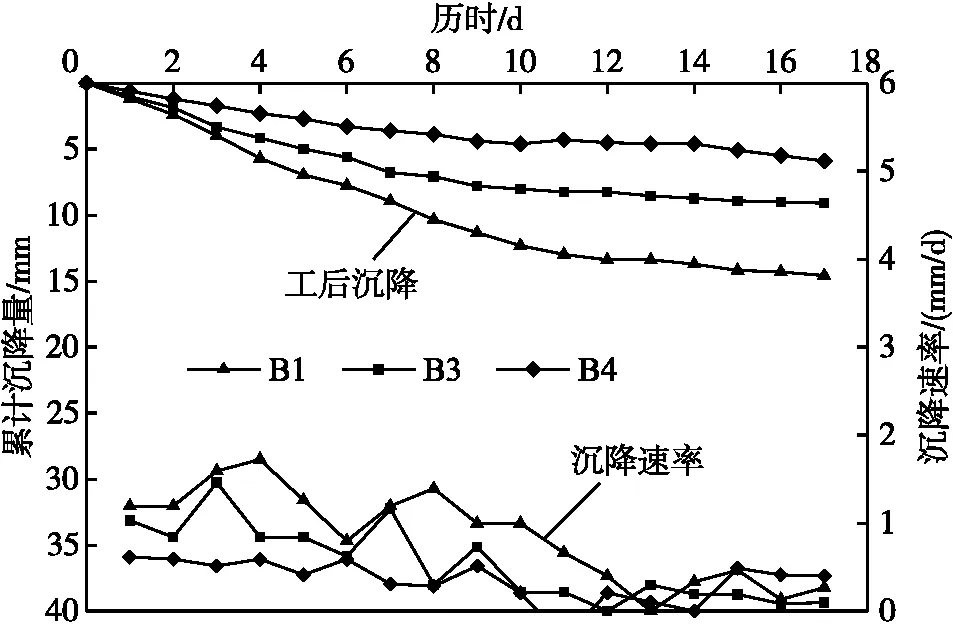
圖9 工后沉降量及沉降速率變化規律
由圖9可知,隨監測時長的增加,工后沉降曲線逐步趨于平緩,但并未出現明顯的拐點。在歷時17 d后,沉降量最大的監測點B1,累計沉降量為14.58 mm,沉降速率已由最初的1.19 mm/d降低至0.26 mm/d;其次為監測點B4,累計沉降量為8.76 mm,沉降速率已由最初的1.03 mm/d降低至0.22 mm/d;監測點B3累計沉降量最小,僅為5.90 mm,沉降速率已由最初的0.61 mm/d降低至0.40 mm/d。
4.2 沉降預測的回歸參數模型

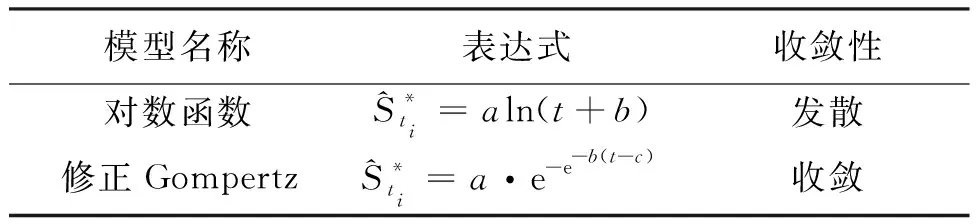
表2 回歸參數模型表達式
4.3 沉降預測的效果評價指標
(1)擬合優度評價指標。選取決定系數(R2)作為預測模型擬合優度的評價指標,計算公式為
(6)

(2)預測誤差的評價方法。采用平均絕對相對誤差(MAPE)、平均預測誤差(MFE)指標判定模型外推預測效果。MAPE值能夠較好地衡量模型的預測精度,其值越小精度越高;MFE值能較好體現模型的無偏性(如預測值相對于實測值的正負偏差)。計算公式分別為
(7)
(8)

4.4 沉降預測的效果對比分析
場地內各監測點的工后期監測歷時均為17 d(每天為1期,共17期實測數據),利用前11期實測數據求解模型參數,后6期實測數據檢驗模型的外推預測效果。建模參數與預測精度指標統計見表3,建模曲線如圖10所示。可知,修正Gompertz模型、對數函數模型的相關系數R2平均值分別為0.993 2、0.966 3,MAPE平均值依次為1.6%、3.7%,MFE平均值依次為0.03、0.40。即修正Gompertz模型的內擬合精度及外推預測精度均優于對數函數模型,且根據圖11可知,修正Gompertz模型的內擬合、外推預測的相對誤差比較穩定,且均低于7.0%,因此選取修正Gompertz模型作為此次沉降預測模型。
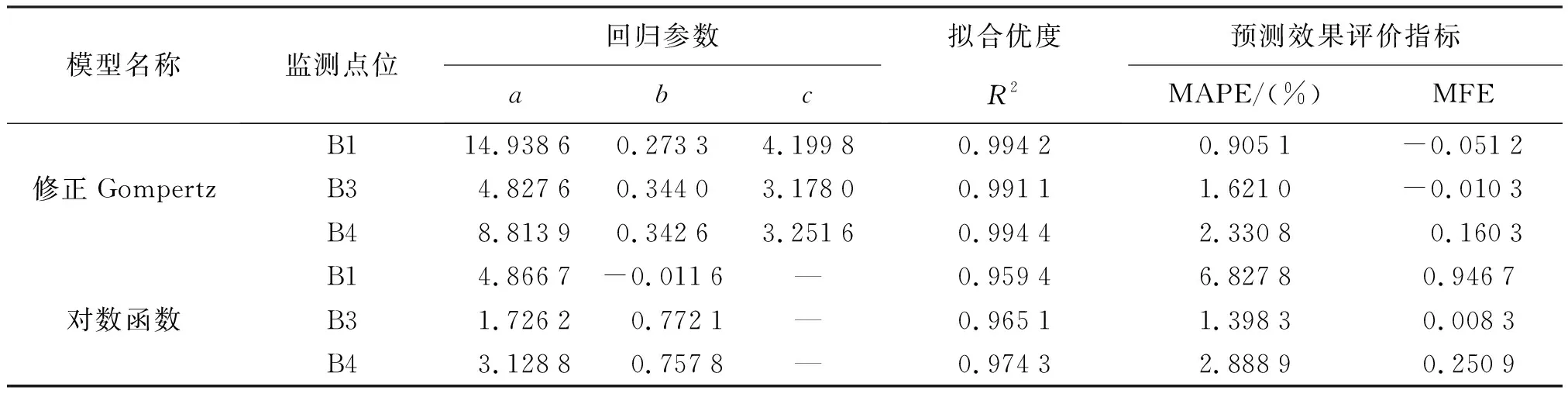
表3 預測模型的回歸參數及精度統計
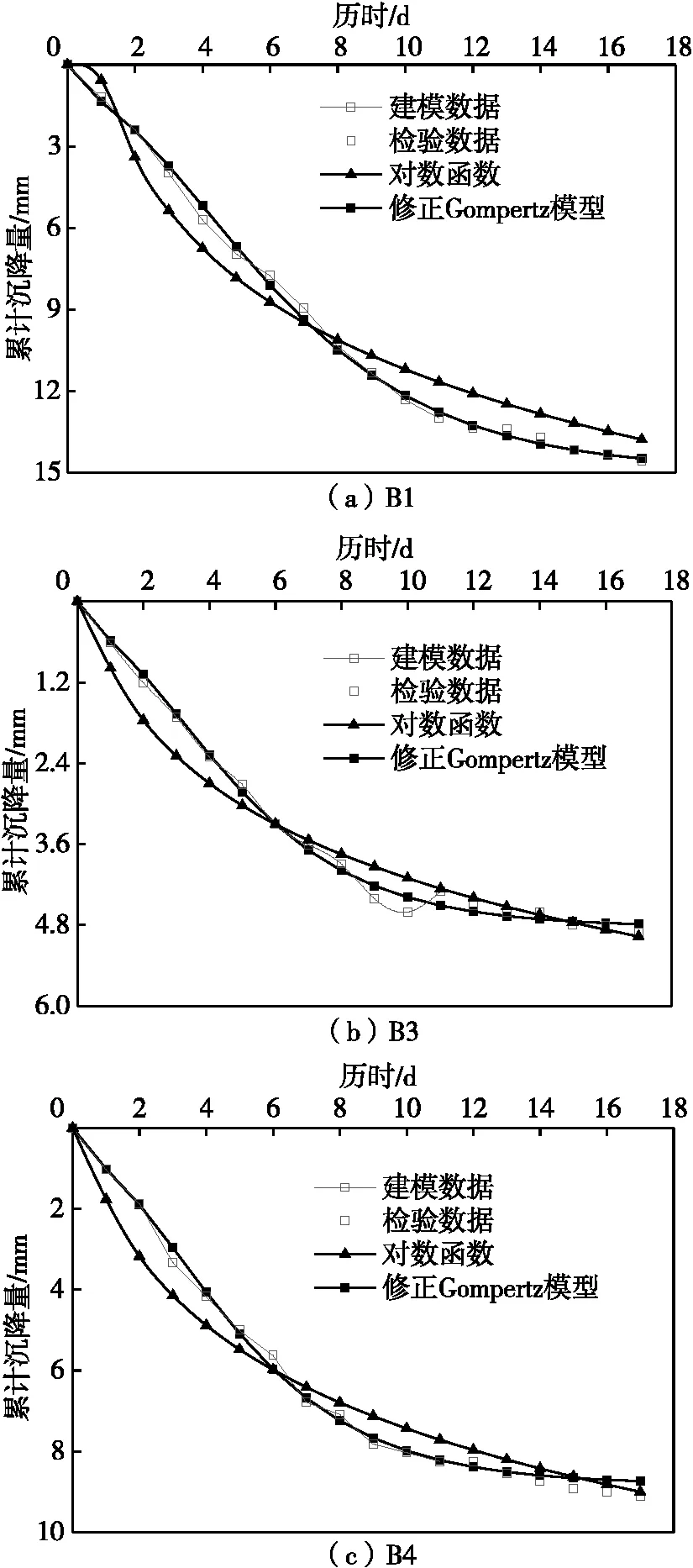
圖10 工后沉降監測及預測曲線
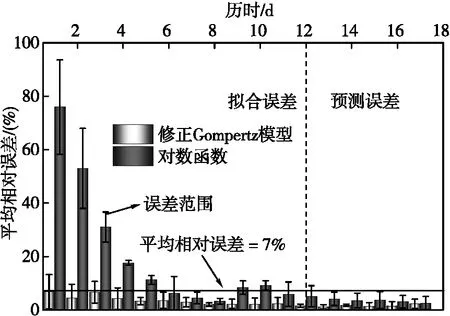
圖11 修正Gompertz預測誤差變化規律
4.5 最終沉降量預測
參考現行《建筑變形測量規范》[17],選取0.04 mm/d的沉降速率為穩定標準。沉降速率表達式為
S′ti=ab·e-e-b(ti-c)-b(ti-c)
(9)
式中,S′ti表示第i期對應的沉降速率。計算系數取值參考表3。
經過計算,該場地B1處將在工后22 d后達到穩定,其工后沉降量為14.8 mm,總沉降量為100.5 mm;B3處將在工后14 d后達到穩定,工后沉降量為4.7 mm,總沉降量為101.5 mm;B4處將在工后16 d達到穩定,工后沉降量為8.7 mm,總沉降量為99.8 mm。3個測點的總沉降量均在100 mm左右,監測期間內未發生明顯的差異沉降。
5 結 論
(1)施工干擾會使BDS變形監測系統監測數據產生較大波動,導致難以準確判斷場地的變形趨勢,需要通過降噪方法予以校正。
(2)利用Daubechies小波降噪方法能有效剔除由施工干擾產生的噪聲信息,降噪后的監測數據與水準監測數據的相對誤差為5.5%~10.3%。
(3)利用修正的Gompertz模型預測該場地B1、B3、B4的穩定時間分別為22、14、16 d,總沉降量分別為100.5、101.5、99.8 mm,場地在監測期間內未發生明顯差異變形。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03