基于能量轉移理論的行車風險量化建模方法研究
2023-10-12 04:28:28鄭訊佳李會蘭胡孟夏張強陳華趙樹廉高建杰
汽車工程學報 2023年5期
鄭訊佳, 李會蘭, 胡孟夏, 張強, 陳華, 趙樹廉, 高建杰
(1. 中國汽車工程研究院股份有限公司,重慶 401122;2. 重慶文理學院 智能制造工程學院,重慶 402160;3. 重慶城市職業學院 信息與智能制造學院,重慶 402160;4. 中汽院智能網聯研科技有限公司,重慶 401122;5. 智能警務四川省重點實驗室,四川,瀘州 646000)
行車風險受到人-車-路三方面中多種因素的綜合影響。由于道路交通復雜,路況多變;駕駛員特性各異,行為不定;車輛系統復雜,性能耦合,使行車風險具有時變、復雜和耦合的特性。行車風險的辨識和評估技術能幫助駕駛員提前識別風險,降低交通事故的發生率和傷亡率,緩解嚴峻的行車安全現狀。
現有研究對風險的定義,其一是將風險視為某一系統內有害事件或異常事件發生的可能性;其二是把風險定義為某一事故產生的后果和該事故發生概率的乘積[1]。研究人員通常用描述碰撞的參數對行車風險進行定量評估,主要有基于事故分析的風險評估方法、基于車輛運動學的風險評估方法和基于人工勢能場的風險評估方法。
其中,基于事故分析的風險評估方法,通常采用計算單位里程事故率(死亡率)、百萬輛車事故率(死亡率)、百萬人事故率(死亡率)、十萬人口死亡率、億車公里事故率(死亡率、受傷率)、當量死亡率和綜合事故率等事故統計指標,以評估道路環境中車輛運行的安全情況[2-3]。這類方法通常依賴海量歷史事故數據,屬于事后評估方法,難以及時評價行車過程中的動態風險,難以刻畫當前行車安全水平,同時該方法所依賴的道路碰撞數據通常還存在報告不足、樣本均值低、行為信息有限和遺漏變量偏差等缺點。基于車輛運動學的風險評估方法,通常考慮空間和時間上的安全距離,如保證行車安全的車輛間最小距離[4]、臨界安全距離[5]、碰撞剩余時間(Time to Collision,TTC)[6-7]、碰撞剩余時間的倒數(inverse Time to Collision,TTCi)[8]、車頭時距(Time Headway,THW)[9]等。基于車輛運動學的風險方法由于簡潔方便,得到了廣泛的應用,從20 世紀90 年代開始,本田、馬自達、捷豹等國際汽車企業均應用此類方法分別為各自的汽車產品開發了輔助駕駛算法,并促使對駕駛安全輔助算法的相關研究進入高速發展期。然而,這類方法通常單獨對車輛行駛的縱向或橫向上的風險狀態進行量化建模,難以應對一些復雜的行駛場景[10]。為了實現車輛行駛過程中的縱橫向風險耦合評估,研究人員開始采用人工勢能場來描述車輛與周圍環境的相互關系和風險程度。HSU 等[11]采取與車輛安全間隙的引力和周圍其他車輛的斥力建立了引力跟車模型。MATSUMI 等[12基于人工勢能場實現了交叉路口車輛對行人的避撞行為,實現了對交叉路口場景中易受傷害道路使用者的保護。RAKSINCHAROENSAK 等[13]采用彈簧模型研究車輛與行人之間的行車風險,設計用于交叉路口的駕駛安全輔助系統,但所提出方法的應用場景有限,而且模型適應性尚待提高。SATTEL 等[14]利用勢能場理論設計車輛路徑規劃算法,實現智能汽車的車道保持和避撞系統功能,還實現了對靜止障礙物和運動障礙物的區分。LI Linheng 等[15]提出的人工勢能場函數中的排斥場包含多個組成部分,包括道路邊界勢、車道勢和障礙物勢,這些組成部分組合在一起,成為完整的風險圖。雖然最初的應用主要集中在自動化車輛上,但一些研究人員已經嘗試將這一概念用于人類駕駛車輛的安全建模。清華大學王建強團隊[10,16]意識到,為了可靠地模擬人類駕駛車輛的個人碰撞風險,需要在安全領域功能中考慮與駕駛員、車輛和道路相關的各種風險因素,并確定了行車安全場的3 個組成部分:勢能場、動能場和行為場。但模型中參數眾多,難以標定,在實際應用中存在一定局限性。
綜上可知,行車風險量化建模是開發智能駕駛輔助系統算法的關鍵環節,國內外學者對于行車風險的評估已經開展了大量的研究,但是仍存在較多不足之處。為了減少模型的待定參數,簡化模型,本文從能量轉移理論出發,結合車輛運動學約束,基于車輛的行駛軌跡分析行車風險的分布并量化車輛行駛過程中的行車風險,該方法將為汽車智能安全技術研究提供新的思路。
1 能量轉移理論分析
1961 年,吉布森(Gibson)提出:事故是不正常的或不期望的能量釋放的結果。1966 年,哈登(Haddon)引申了上述觀點并提出人受傷害的原因只能是某種能量的轉移,并提出了能量逆流于人體造成傷害的分類方法。第一類傷害是由于施加了超過局部或全身性的損傷預知的能量而產生的,如機械傷害、燒傷等。第二類傷害是由于影響了局部或全身性能量交換引起的,如由機械因素或化學因素引起的窒息(常見的有溺水、一氧化碳中毒和氰化氫中毒等)[17]。
系統安全工程研究認為,事故的根本原因是存在危險源。通過控制和消除系統中的危險源可以防止意外事故的發生[18]。通常危險源可以分為兩類,其一是系統中可能意外釋放的能量或危險物質;其二是指導致能量或危險物質約束失效的各種不安全因素,主要包括系統故障、人為失誤和環境因素[18]。
道路交通事故中碰撞過程的本質是運動物體所具有的能量(如動能、化學能等)轉化為其他形式的能(如熱能、彈性勢能等),并造成彈性、塑性形變的過程。能量轉移理論認為:事故是能量的不正常轉移[19]。在交通系統中,運動物體(如車輛、騎車人、行人)都具有動能,車輛從起步開始加速至某一速度的過程實際上是自身動能不斷增長的儲能過程,若在某一時刻與某一物體發生碰撞,則其儲存的能量將釋放和轉移并導致彈性和塑性變形,那么在碰撞過程中,動能越大造成的損害就越大。
因此,可以根據上述定義方便地分析道路運輸系統中的危險源。第一類危險源包括車輛的動能、燃料和危險化學品等危險物質;第二類危險源包括人的失誤、機械故障、惡劣路況、惡劣天氣等。
2 量化行車風險的基本模型
根據對能量轉移理論的分析可知,只要確定出交通系統中的危險源,就能根據危險源的能量釋放可能的途徑去分析風險的演變趨勢。
在交通系統中,每一個道路使用者都包含動能,包括車輛、行人和騎車人等。因此,可以根據移動物體的動能值來描述交通風險的程度。對于單個運動物體,其動能可以表示為:
式中:Ei,mi,和vi分別為道路使用者i的動能、質量和運動速度;Δxi為道路使用者i正前方某一點與i的距離。Ei的單位為J,Δxi的單位為m。令:
式中:Fi為攜帶能量為Ei的道路使用者i對其運動方向上的道路交通環境造成的風險作用力,單位N。
如果不考慮方向性,假設作用力Fi在任意方向上的影響相同,即存在各向同性,取mi= 1 000 kg,vi= 20 m/s,道路使用者坐標為Oi=(0,0),則該道路使用者對外界產生的風險可以用圖1表示。
3 考慮車輛動力學約束的行車風險模型
對于在道路交通環境中正常行駛的車輛而言,其在運行過程中對交通環境造成的行車風險不具有各向同性,顯然,車輛對其運動方向正前方的行車風險最大。即行車風險存在其既定的影響范圍。
行車風險是由車輛和道路交通環境的相互作用而產生,它與車輛的運動狀態和道路環境條件有關。假設駕駛車輛的駕駛員始終遵守道路交通環境中的交通規則和法規,且車輛行駛時其速度恒定,當車輛轉向時其轉向角也恒定。此外,根據車輛動力學可知,車輛在某一速度下維持穩定行駛的最大轉向角存在極值。因此,考慮車輛動力學約束下,車輛對外界的風險具有特定的范圍。
如果用R(t)表示車輛的轉彎半徑,則有:
式中:K為穩定性因素;L為車輛i的軸距;δ為轉向角。
假設車輛始終受控并穩定行駛,則其速度和轉彎半徑的最大值取決于道路條件。車輛的運動狀態將服從式(5)~(7)。
式中:FX和FY分別表示車輛輪胎所受的縱向力和橫向力;FZ為地面支撐反力;φ為路面附著系數;f為滾動阻力系數;CD為空氣阻力系數;A為車輛的迎風面積。
因此,車速vi與車輪轉角δ之間的關系滿足式(8):
式中:W=CDA/21.15;
隨著車輛行駛速度的增加,車輛動力學約束下所允許的轉向角按照式(8)減小。同時,車輪轉角δ取決于車輛的機械結構。最大值等于轉向角極限δmax。對于乘用車,通常有δmax∈[-π/4,π/4]。顯然,|δ(t)|≤δmax。
因此,車輛在運動過程中,其可能運動的軌跡范圍存在一定的邊界,即存在轉向的左極限和右極限,在此極限邊界內車輛為穩定狀態,反之則車輛失去穩定性,即可能出現翻車的情況。
假設駕駛員在行車過程中轉動轉向盤的概率服從一定的概率分布,如果轉向角和轉向概率分別為δk和pk,則有:
式中:k∈[-n,n],k,n∈Z;Δδ為轉向角的增量。此外,δ0表示直行,如果k為正整數,δk表示左轉,否則δk表示右轉。
顯然,車輛在不同的工況下的轉向概率不同,比如在高速公路等車道曲率變化小的道路行駛過程中,駕駛員轉動方向盤的幅度小,只在換道過程中會有較大幅度的轉向行為,但行駛在盤山公路等車道曲率變化較大的環境中則相反。無論道路曲率大還是小,都可以通過Frenet 坐標的變換,將曲線道路變換為直行道路,這一技術通常被應用于軌跡規劃中[20]。本研究利用項目組采集并建立的i-VISTA中國自然駕駛數據庫對駕駛員轉向的概率進行分析,該數據庫共采集了50 名駕駛員自由行駛過程的數據,包括:GPS 信號數據、前向車載攝像頭數據、前向毫米波雷達數據、激光雷達數據和車輛的CAN總線數據,累計里程達100萬公里。
⑤經常飲用的碳酸飲料,不僅含有大量的糖分(大量糖分導致抑制眼球增長的有效物質減少),還能使體內鈣減少,導致鞏膜中鈣的含量下降,使眼球壁失去正常的彈性,眼球容易被拉長,眼軸增長過快,易引發近視并加快近視度數增長。
本研究從數據庫中隨機抽取了6 天不同時段2 500 km 的車輛行駛數據,對應280 個數據段和11 200 min 的駕駛數據。該區域覆蓋了城市道路和環城高速公路,大部分為道路曲率變化小的直行道路場景,其中涵蓋了跟車和換道等場景。對數據進行擬合獲得以概率密度函數,如式(11)所示。
由式(11)可知,車輛保持直行(即k= 0 時)的概率最大,由于車輪轉角處于不同的角度的概率不同,所以行車風險對各個方向上的影響也顯然不同。為了量化恒定車速下不同車輪轉角對道路交通環境所造成的行車風險差異,結合式(2),定義考慮車輛行駛動力學約束的行車風險為:
式中:
取mi= 1 000 kg,vi= 20 m/s,道路使用者坐標為Oi=(0,0),則該道路使用者對外界產生的風險如圖2所示。
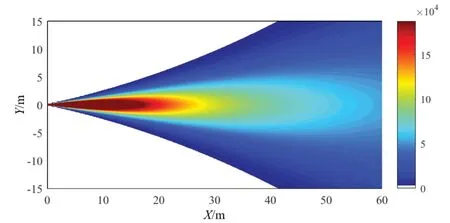
圖2 風險作用力分布圖(考慮車輛動力學約束)
如圖2 所示,把車輛看作Oi=(0,0)處的一個質點,運動方向為X軸的正方向。圖中白色扇形區域為車輛在動力學約束下不能正常行駛到達的區域,因此,這部分的風險作用力的值為0,即車輛對這部分區域不產生行車風險,這不僅符合車輛的運動學規律,也符合人對行車風險的主觀感受。另一個值得說明的特點在于,車輛直行時,在20 m以內的正前方,行車風險較高,計算該區域的碰撞時間TTC 可知,該區域的TTC ≤1 s,屬于危險區域。相比圖1 所示的各向同性的行車風險模型,考慮車輛動力學約束的行車風險模型更加準確。
4 仿真試驗
為了驗證模型的有效性,針對換道超車場景設計了以下2 個場景,如圖3 所示:場景1 為跟車場景,自車(ego vehicle)為后車,坐標為(5,6),速度ve= 12 m/s,前車(other vehicle 1) 坐標為(19,6),速度為vo1= 10 m/s;場景2 在場景1 的基礎上增加了鄰車(other vehicle 2), 坐標為(17,2),速度為vo2= 10 m/s。
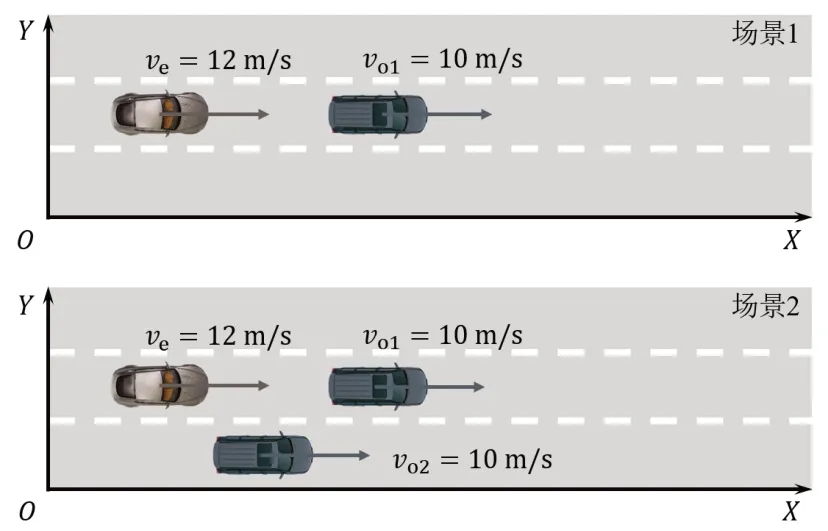
圖3 仿真試驗場景
設置每輛車的質量均為me=mo1=mo2=1 500 kg,根據式(12),利用Matlab 進行仿真分析,得到的結果如圖4所示。

圖4 仿真結果
圖4a 顯示的是場景1 當前狀態的風險情況。根據場景設置可知,自車和前車相距14 m,如果保持該運動狀態,7 s 后自車將追尾前車。同時,由圖4a 可知,兩車各自產生的行車風險處于疊加狀態,整個交通環境中的風險明顯升高;當自車選擇右轉向,如圖4b 所示,則兩車各自產生的行車風險分離,道路交通環境中的整體風險明顯有所下降。
圖4c 顯示的是場景2 當前狀態的風險情況。同樣,根據場景設置可知,自車和前車相距14 m,若保持該運動狀態,7 s 后自車將追尾前車。此外,由于鄰車的存在,與圖4a 相比,觀察x∈[30,60]區間內的道路風險情況發現,3 輛車各自產生的行車風險的疊加造成場景2 中的道路交通風險明顯高于場景1,當前道路交通環境風險相比場景1 更大。此時,當自車選擇向左轉向,如圖4d 所示,整個道路交通風險情況明顯下降。
通過計算上述2 個場景當前狀態的風險情況,以及自車通過改變運動狀態能避開風險,使道路交通環境風險整體降低,驗證了風險建模的準確性。
把上述兩個場景各自對應的兩個狀態用狀態1~4 表示。其中,狀態1 對應場景1(危險狀態);狀態2 對應場景1(自車轉向避險);狀態3 對應場景2(危險狀態);狀態4 對應場景2(自車轉向避險)。分別計算4 個狀態下圖示環境中行車風險的均值和方差,獲得的結果如圖5所示。

圖5 行車風險均值和方差
由圖5 可知,自車轉向避險的狀態(狀態2、狀態4)相比對應的危險場景(狀態1、狀態3),行車風險的均值和方差都有明顯下降。說明自車轉向避險的行為使轉向行為之前的危險場景的危險狀態獲得了緩解。
為了進一步驗證模型的有效性,針對近距離勻速行駛、小相對速度靠近、大相對速度靠近3 種場景進行分析。在本部分仿真中,基于圖3 中的場景1 進行了擴展。設置前車速度為vo= 20 m/s,自車分別以ve= 20 ,25 ,30 m/s 的跟車速度行駛。如圖6所示,場景3表示兩車近距離勻速行駛;場景4表示小相對速度靠近;場景5 表示大相對速度靠近。分別計算前后車距為40 m 和20 m 時,圖示環境中交通風險的均值和方差。
同樣,將上述3 個場景各自對應的兩個狀態用狀態1~6 表示。其中,狀態1 對應場景3(車距40 m);狀態2 對應場景3(車距20 m);狀態3 對應場景4(車距40 m);狀態4 對應場景4(車距20 m);狀態5 對應場景5(車距40 m);狀態6 對應場景5(車距20 m)。分別計算6個狀態下圖示環境中行車風險的均值和方差,獲得的結果如圖7所示。
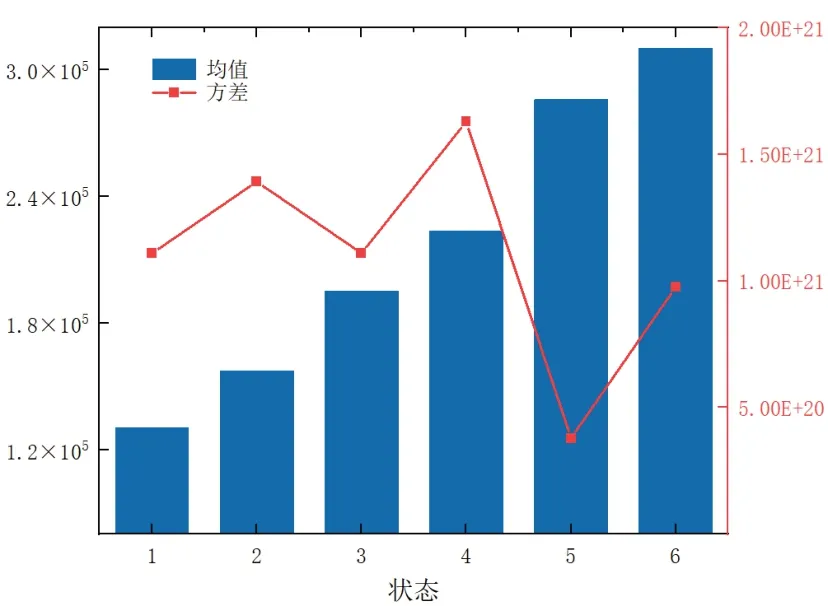
圖7 行車風險均值和方差
對比3 個場景各自的兩個狀態可以看出,3 個場景中車距40 m 時行車風險的均值和方差都比車距20 m 時的均值和方差大。當車距相同時(40 m或20 m),場景3、4、5 行車風險的均值呈現隨自車速度增加而增加的趨勢。計算6 個狀態的車頭時距,見表1,可以看出,按照THW,狀態1、3、5的風險分別小于狀態2、4、6;在同樣的車距下,場景3 風險小于場景4 風險,場景4 風險小于場景5風險。THW 分析結果顯示,6個狀態的危險程度與行車風險均值方差分析結果吻合。

表1 六個狀態的THW
5 結論
本文提出了一種基于能量轉移理論的行車風險量化建模方法。利用車輛攜帶的動能推導了車輛對道路交通環境或其他道路使用者產生的行車風險。同時,考慮車輛動力學因素,通過計算確定車輛的可行駛區域,確立了行車風險的影響范圍。風險作用力分布圖顯示,行車風險由車輛的速度和轉向角等車輛的運動狀態決定,并且還與道路附著系數、滾動阻力系數和空氣阻力系數等道路交通環境條件有關。由仿真分析結果可知,道路交通風險的產生是由于道路交通環境中各個車輛所產生的行車風險交織,引起風險累積疊加造成的,緩解道路交通風險可以考慮通過避免行車風險的大規模疊加,使行車風險的分布向分散的趨勢演變,避免風險累積集中。未來研究將通過綜合考慮人-車-路相互作用對行車風險進行詳細建模,嘗試刻畫風險作用力對道路交通環境中每個道路使用者的危險程度。同時,基于能量轉移理論的行車風險量化建模方法將開發實用的駕駛輔助算法和自動駕駛算法。