混合動(dòng)力專用變速器虛擬標(biāo)定技術(shù)研究
2023-10-17 08:47:00寧甲奎孫飛曹珊
汽車工程師 2023年10期
關(guān)鍵詞:發(fā)動(dòng)機(jī)模型
寧甲奎 孫飛 曹珊
(中國(guó)第一汽車股份有限公司研發(fā)總院,長(zhǎng)春 130013)
1 前言
標(biāo)定是系統(tǒng)實(shí)現(xiàn)復(fù)雜功能和精細(xì)性能的關(guān)鍵技術(shù)[1]。虛擬標(biāo)定是基于模型的標(biāo)定技術(shù),可以縮短開(kāi)發(fā)周期、降低標(biāo)定成本。
虛擬標(biāo)定技術(shù)研究的關(guān)鍵是建立高精度且具有實(shí)時(shí)運(yùn)算能力的模型。目前虛擬標(biāo)定技術(shù)領(lǐng)域大部分文獻(xiàn)集中于發(fā)動(dòng)機(jī)標(biāo)定,主要是建立發(fā)動(dòng)機(jī)一維仿真模型[2]、均值模型[3]、發(fā)動(dòng)機(jī)一維預(yù)測(cè)模型[4]開(kāi)展車載診斷(On-Board Diagnostics,OBD)系統(tǒng)標(biāo)定、燃油消耗和污染物排放標(biāo)定等研究。此外,福特公司在駕駛性虛擬標(biāo)定研究中進(jìn)行了變速器對(duì)象模型的開(kāi)發(fā)[5]。硬件在環(huán)(Hardware In the Loop,HIL)技術(shù)解決了虛擬標(biāo)定只能用于穩(wěn)態(tài)過(guò)程優(yōu)化,無(wú)法完成瞬態(tài)工況以及相應(yīng)控制器標(biāo)定的問(wèn)題。基于硬件在環(huán)的虛擬標(biāo)定平臺(tái)適用于過(guò)程控制參數(shù)的標(biāo)定,更加適合實(shí)際應(yīng)用。Liu 等利用所搭建的硬件在環(huán)虛擬標(biāo)定平臺(tái)進(jìn)行了整車駕駛性的虛擬標(biāo)定[5]。Andric 等[4]和徐文杰[6]應(yīng)用硬件在環(huán)虛擬標(biāo)定平臺(tái)進(jìn)行了發(fā)動(dòng)機(jī)虛擬標(biāo)定。同時(shí),很多學(xué)者通過(guò)驗(yàn)證證明了虛擬標(biāo)定方法能夠有效縮短標(biāo)定周期、提高標(biāo)定的精度[7-9]。
混合動(dòng)力專用變速器(Dedicated Hybrid Transmission,DHT)是新能源汽車的核心部件之一。隨著自動(dòng)變速器控制精度要求的提高,DHT系統(tǒng)愈加復(fù)雜,需要標(biāo)定的工況和參數(shù)數(shù)量大幅增加,同時(shí),整車開(kāi)發(fā)周期的逐漸縮短進(jìn)一步壓縮了DHT 系統(tǒng)的標(biāo)定周期。虛擬標(biāo)定技術(shù)可在設(shè)計(jì)階段啟動(dòng)預(yù)標(biāo)定工作,輔助臺(tái)架和整車標(biāo)定,從而減少樣品數(shù)量和試驗(yàn)工作量、縮短開(kāi)發(fā)周期[10-11]。目前國(guó)內(nèi)外虛擬標(biāo)定的研究中,針對(duì)變速器虛擬標(biāo)定的研究較少。本文基于HIL 虛擬仿真平臺(tái)開(kāi)展DHT 的虛擬標(biāo)定,首先,建立可支持實(shí)時(shí)運(yùn)行的DHT 模型,然后,構(gòu)建硬件在環(huán)虛擬標(biāo)定平臺(tái)并開(kāi)展虛擬標(biāo)定,最后,對(duì)虛擬標(biāo)定的結(jié)果進(jìn)行驗(yàn)證分析。
2 混合動(dòng)力專用變速器仿真模型的建立
2.1 混合動(dòng)力專用變速器結(jié)構(gòu)
本文的研究對(duì)象是針對(duì)P2 構(gòu)型混合動(dòng)力車型開(kāi)發(fā)的某混合動(dòng)力汽車專用變速器,混合動(dòng)力系統(tǒng)基本結(jié)構(gòu)如圖1所示。電機(jī)位于發(fā)動(dòng)機(jī)與變速器之間,由離合器控制電機(jī)與發(fā)動(dòng)機(jī)間的動(dòng)力通斷,電機(jī)連接雙離合變速器。本文分別針對(duì)機(jī)械部分和控制部分進(jìn)行仿真模型搭建。
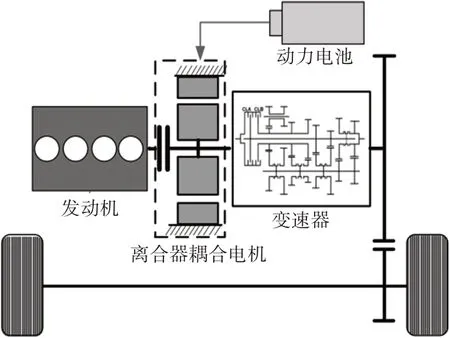
圖1 P2構(gòu)型混合動(dòng)力系統(tǒng)結(jié)構(gòu)
2.2 混合動(dòng)力專用變速器仿真模型的建立
本文采用AMEsim 軟件對(duì)DHT 模型進(jìn)行搭建。AMEsim 可對(duì)DHT 系統(tǒng)進(jìn)行物理建模而不必搭建數(shù)學(xué)模型,同時(shí)能夠保證模型的準(zhǔn)確度。
DHT 系統(tǒng)由液壓系統(tǒng)和機(jī)械系統(tǒng)組成,如圖2所示。液壓系統(tǒng)包括低壓閥和高壓閥:低壓閥主要采用流量閥,用于控制離合器的潤(rùn)滑流量,流量對(duì)離合器的拖曳扭矩和溫度有顯著影響;高壓閥以壓力閥為主,主要控制離合器的壓力和換擋撥叉的動(dòng)作。機(jī)械系統(tǒng)主要包括離合器、同步器和軸齒。離合器作為主要部件,需進(jìn)行臺(tái)架測(cè)試,采集各工況點(diǎn)的摩擦因數(shù)作為模型的輸入,以實(shí)現(xiàn)精確仿真。同步器作為仿真撥叉動(dòng)作的關(guān)鍵部件,需要先對(duì)同步環(huán)進(jìn)行詳細(xì)的三維模型搭建,然后根據(jù)模型參數(shù)搭建仿真模型。軸齒部分只有傳動(dòng)比對(duì)換擋控制有影響,可簡(jiǎn)化建模。最后,對(duì)模型各部分進(jìn)行集成。模型主要參數(shù)如表1所示。
表1 變速器主要參數(shù)
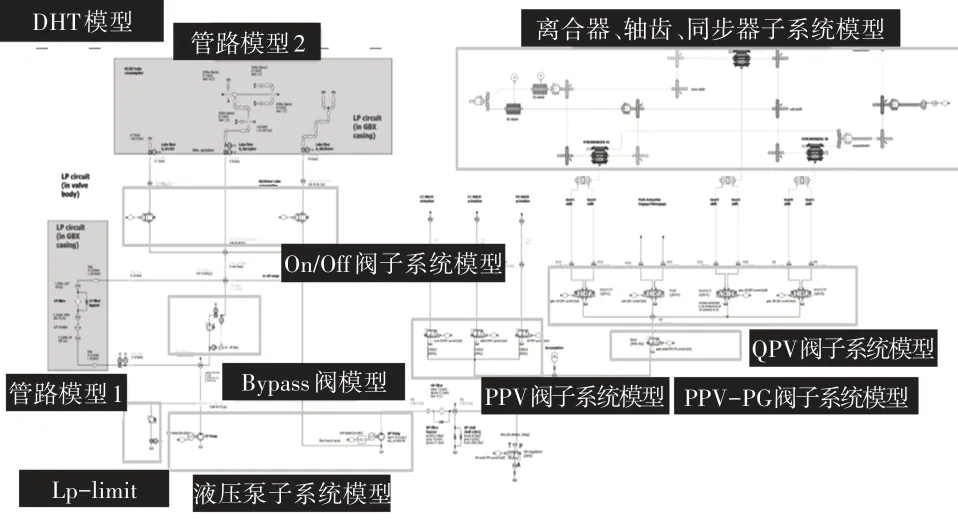
圖2 DHT總成模型
2.3 控制系統(tǒng)模型搭建
DHT 控制模型需要各種控制算法,故采用MATLAB/Simulink 搭建控制模型最為合適。控制模型主要處理變速器端的輸入信號(hào),經(jīng)過(guò)一定處理,如電壓信號(hào)轉(zhuǎn)換為壓力信號(hào)等信號(hào)轉(zhuǎn)換過(guò)程,得到控制器能夠識(shí)別的信號(hào),通過(guò)擋位需求、換擋協(xié)調(diào)、擋位執(zhí)行、離合器控制、液壓系統(tǒng)控制模塊的計(jì)算,最終通過(guò)輸入/輸出(Input/Output,I/O)模塊輸出電磁閥電流,控制變速器進(jìn)行換擋操作。
輸入輸出處理器(I/O Processor,IOP)模塊主要處理傳感器的信號(hào)。擋位需求模塊主要根據(jù)傳感器采集的信號(hào)計(jì)算合適的擋位。本文根據(jù)節(jié)氣門開(kāi)度和車速確定擋位。換擋協(xié)調(diào)模塊的作用是協(xié)調(diào)各模塊間信號(hào)傳輸并處理計(jì)算結(jié)果,需要換擋時(shí),如果撥叉沒(méi)有到位時(shí)即發(fā)出指令,控制離合器保持壓力在半接合點(diǎn),不傳遞扭矩。擋位執(zhí)行模塊主要執(zhí)行撥叉換擋操作。離合器控制模塊負(fù)責(zé)控制離合器的扭矩和壓力,DHT 換擋過(guò)程是離合器到離合器(Clutch to Clutch)過(guò)程,換擋時(shí),擋位執(zhí)行模塊先動(dòng)作,預(yù)先掛好擋位,之后離合器動(dòng)作,切換擋位。液壓系統(tǒng)將擋位執(zhí)行模塊和離合器控制模塊發(fā)出的指令換算成電流,控制電磁閥正常工作。控制模型如圖3所示。
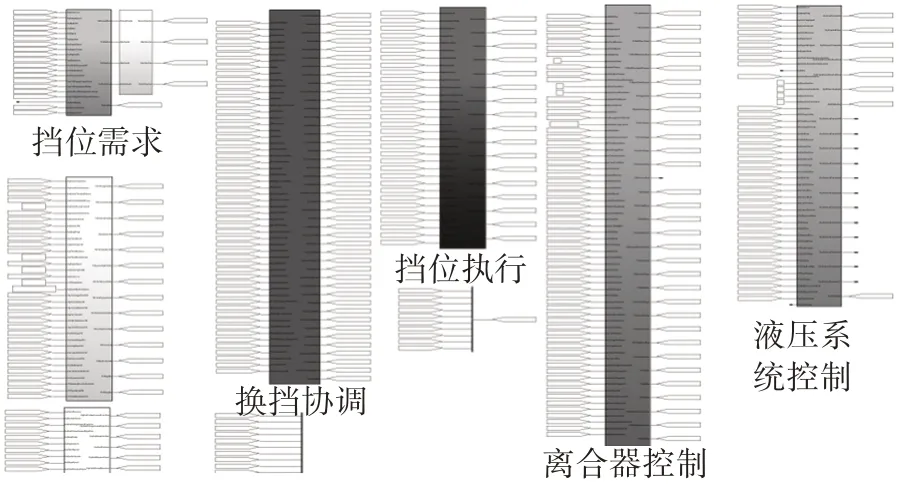
圖3 控制系統(tǒng)模型
3 虛擬標(biāo)定平臺(tái)搭建及虛擬標(biāo)定方法
虛擬標(biāo)定試驗(yàn)臺(tái)有模型在環(huán)(Model in the Loop,MIL)、軟件在環(huán)(Software in the Loop,SIL)和HIL 3 種方式。本文以HIL 為基礎(chǔ)對(duì)DHT 開(kāi)展虛擬標(biāo)定。
通過(guò)dSPACE 的I/O 接口搭建DHT 的HIL 虛 擬標(biāo)定平臺(tái),對(duì)爬行和起步工況進(jìn)行虛擬標(biāo)定。
3.1 虛擬標(biāo)定平臺(tái)建立
采用dSPACE 實(shí)時(shí)硬件搭建DHT 虛擬標(biāo)定平臺(tái),如圖4 所示。平臺(tái)包括dSPACE 實(shí)時(shí)硬件、監(jiān)控通信工具CANape、DHT 控制器、計(jì)算機(jī)的ControlDesk 控制平臺(tái)。dSPACE 實(shí)時(shí)硬件裝載了需要標(biāo)定的DHT 實(shí)時(shí)模型,即車輛模型、I/O 模型。車輛模型能夠模擬真實(shí)車輛的運(yùn)行情況,其包含動(dòng)力輸出模型、傳動(dòng)系統(tǒng)模型、電機(jī)模型、電池模型、車輛動(dòng)力學(xué)模型、駕駛員和道路模型,以及為離線仿真建立的發(fā)動(dòng)機(jī)控制器模型。
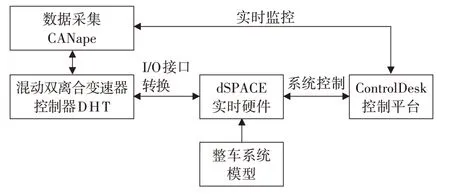
圖4 DHT虛擬標(biāo)定平臺(tái)
通過(guò)運(yùn)行在dSPACE 實(shí)時(shí)硬件中的車輛模型和I/O 模型模擬DHT 控制器所需的各種傳感器信號(hào),并通過(guò)CANape 接收控制器發(fā)出的控制信號(hào),從而實(shí)現(xiàn)閉環(huán)控制。此外,基于ControlDesk 軟件開(kāi)發(fā)了測(cè)試界面,用于實(shí)時(shí)控制和觀測(cè)車輛模型仿真過(guò)程,實(shí)現(xiàn)對(duì)實(shí)時(shí)硬件的可視化管理,通過(guò)虛擬儀表監(jiān)控仿真運(yùn)行情況,并對(duì)各類運(yùn)行參數(shù)進(jìn)行采集。
3.2 爬行工況虛擬標(biāo)定
爬行工況虛擬標(biāo)定分為開(kāi)環(huán)部分標(biāo)定和閉環(huán)部分標(biāo)定。通過(guò)發(fā)動(dòng)機(jī)轉(zhuǎn)速及其變化率,以及離合器轉(zhuǎn)速上升過(guò)程的加速度及沖擊確定爬行工況的開(kāi)環(huán)扭矩及閉環(huán)PI參數(shù)。發(fā)動(dòng)機(jī)轉(zhuǎn)速平穩(wěn)、離合器轉(zhuǎn)速穩(wěn)定無(wú)沖擊上升時(shí)的參數(shù)為最佳參數(shù)。
3.2.1 虛擬標(biāo)定步驟
虛擬標(biāo)定的步驟為:
a.確定標(biāo)定開(kāi)環(huán)扭矩最大值。測(cè)試離合器在傳遞不同大小扭矩條件下發(fā)動(dòng)機(jī)的轉(zhuǎn)速變化情況,當(dāng)扭矩提高到一定程度時(shí),發(fā)動(dòng)機(jī)轉(zhuǎn)速明顯下降,此時(shí)的扭矩即為開(kāi)環(huán)扭矩最大值。
b.確定標(biāo)定開(kāi)環(huán)扭矩步長(zhǎng)。測(cè)試各步長(zhǎng)條件下發(fā)動(dòng)機(jī)轉(zhuǎn)速下降的程度,發(fā)動(dòng)機(jī)轉(zhuǎn)速下降100 r/min左右時(shí)的步長(zhǎng)為最佳步長(zhǎng)。
c.確定請(qǐng)求發(fā)動(dòng)機(jī)怠速轉(zhuǎn)速提升值。在起步時(shí)變速器控制單元(Transmission Control Unit,TCU)會(huì)請(qǐng)求發(fā)動(dòng)機(jī)怠速轉(zhuǎn)速提升,以開(kāi)環(huán)扭矩增加后發(fā)動(dòng)機(jī)轉(zhuǎn)速提升和降低相抵消為依據(jù)設(shè)定請(qǐng)求提升的轉(zhuǎn)速。
d.進(jìn)行閉環(huán)扭矩PI 標(biāo)定。以離合器轉(zhuǎn)速與離合器目標(biāo)轉(zhuǎn)速的差值為輸入,經(jīng)過(guò)PI控制計(jì)算扭矩輸出。離合器轉(zhuǎn)速與其目標(biāo)轉(zhuǎn)速的差值越小越好。
3.2.2 標(biāo)定參數(shù)
針對(duì)爬行工況,主要標(biāo)定參數(shù)如表2、表3所示。其中,P、I值均與溫度及離合器有關(guān)。
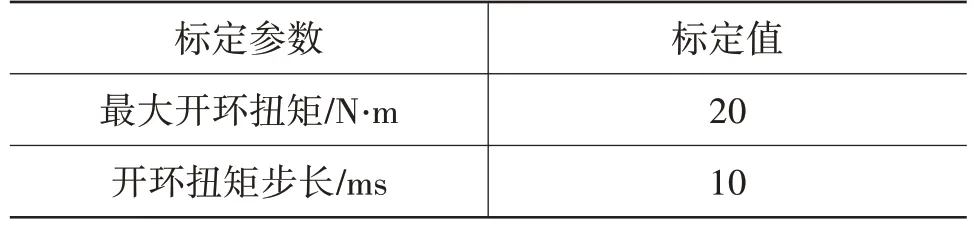
表2 爬行工況標(biāo)定參數(shù)
3.3 起步工況虛擬標(biāo)定
起步工況主要通過(guò)控制離合器壓力來(lái)控制離合器及發(fā)動(dòng)機(jī)轉(zhuǎn)速。通過(guò)標(biāo)定發(fā)動(dòng)機(jī)目標(biāo)轉(zhuǎn)速、目標(biāo)轉(zhuǎn)速差歷程曲線及離合器壓力控制的PI參數(shù),實(shí)現(xiàn)整車平穩(wěn)起步。
3.3.1 虛擬標(biāo)定步驟
虛擬標(biāo)定的步驟為:
a.發(fā)動(dòng)機(jī)轉(zhuǎn)速需要根據(jù)節(jié)氣門開(kāi)度確定,以車輛目標(biāo)加速度為標(biāo)準(zhǔn),標(biāo)定第1 個(gè)階段的發(fā)動(dòng)機(jī)轉(zhuǎn)速。轉(zhuǎn)速標(biāo)定過(guò)低易使起步過(guò)程中發(fā)動(dòng)機(jī)實(shí)際轉(zhuǎn)速低于最低穩(wěn)定轉(zhuǎn)速且加速性能差,轉(zhuǎn)速標(biāo)定過(guò)高則易發(fā)生發(fā)動(dòng)機(jī)轉(zhuǎn)速失控且動(dòng)力響應(yīng)慢。
b.標(biāo)定過(guò)程需參考離合器轉(zhuǎn)速的變化率情況及離合器表面溫度。發(fā)動(dòng)機(jī)轉(zhuǎn)速與離合器轉(zhuǎn)速接近過(guò)快易造成沖擊,接近過(guò)慢則會(huì)出現(xiàn)離合器過(guò)熱的情況。同時(shí),應(yīng)該避免在離合器同步前由1擋換入2擋。
3.3.2 標(biāo)定參數(shù)
針對(duì)起步工況,主要標(biāo)定參數(shù)如表4~表6所示。

表4 爬行工況標(biāo)定參數(shù)-第一階段發(fā)動(dòng)機(jī)目標(biāo)轉(zhuǎn)速

表5 爬行工況標(biāo)定參數(shù)-目標(biāo)轉(zhuǎn)速差歷程曲線
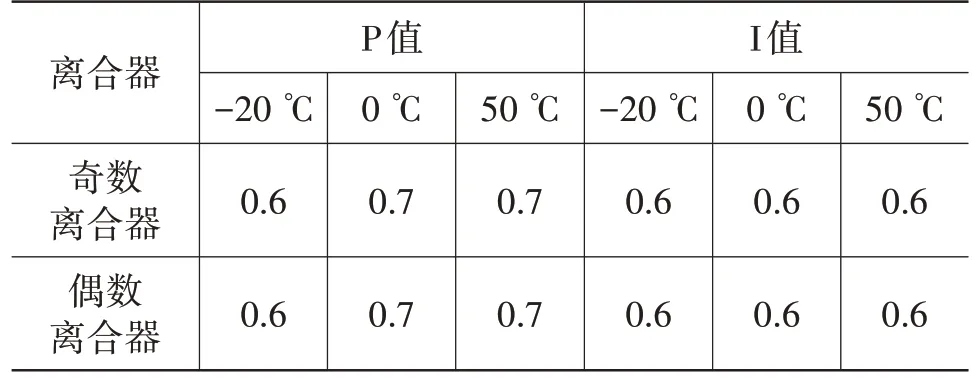
表6 爬行工況閉環(huán)控制系數(shù)
4 虛擬仿真結(jié)果對(duì)比分析
4.1 爬行標(biāo)定仿真結(jié)果
爬行工況主要針對(duì)離合器進(jìn)行標(biāo)定,確定爬行時(shí)的開(kāi)環(huán)扭矩、閉環(huán)扭矩、爬行時(shí)請(qǐng)求發(fā)動(dòng)機(jī)怠速轉(zhuǎn)速提升量以及穩(wěn)定車速等參數(shù)。本文主要標(biāo)定工況為平路爬行,分為開(kāi)環(huán)控制和閉環(huán)控制2個(gè)階段。
開(kāi)環(huán)控制階段主要使變速器快速建立油壓,加快整車爬行的響應(yīng),同時(shí)考慮發(fā)動(dòng)機(jī)能力,防止出現(xiàn)發(fā)動(dòng)機(jī)在起步過(guò)程中實(shí)際轉(zhuǎn)速低于最低穩(wěn)定轉(zhuǎn)速的現(xiàn)象;閉環(huán)控制階段,控制系統(tǒng)實(shí)時(shí)計(jì)算離合器期望轉(zhuǎn)速,同時(shí)根據(jù)期望轉(zhuǎn)速和實(shí)際轉(zhuǎn)速計(jì)算離合器的期望扭矩。本文以開(kāi)環(huán)扭矩和閉環(huán)扭矩的PI 項(xiàng)系數(shù)為重點(diǎn)研究對(duì)象,采用未經(jīng)過(guò)標(biāo)定的參數(shù)時(shí)的整車測(cè)試結(jié)果如圖5所示。利用硬件在環(huán)虛擬仿真平臺(tái)進(jìn)行爬行仿真標(biāo)定,將標(biāo)定結(jié)果集成到整車進(jìn)行測(cè)試,測(cè)試結(jié)果如圖6所示。結(jié)果表明,在標(biāo)定前,車輛爬行平穩(wěn),但起步過(guò)慢,輸出軸加速度在16 r/min2以下。經(jīng)標(biāo)定后,輸出軸加速度無(wú)明顯波動(dòng),車輛可以平穩(wěn)起步,同時(shí)提高了車輛起步的響應(yīng)速度,輸出軸加速度在22 r/min2以下。標(biāo)定結(jié)果使整車加速性能表現(xiàn)更優(yōu)秀,數(shù)據(jù)更合理。
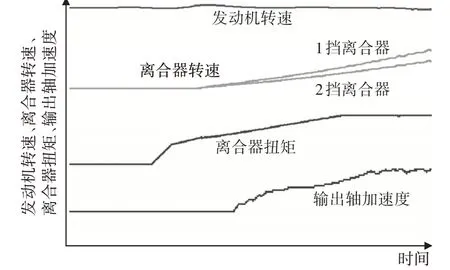
圖5 利用默認(rèn)標(biāo)定值進(jìn)行實(shí)車爬行工況測(cè)試結(jié)果
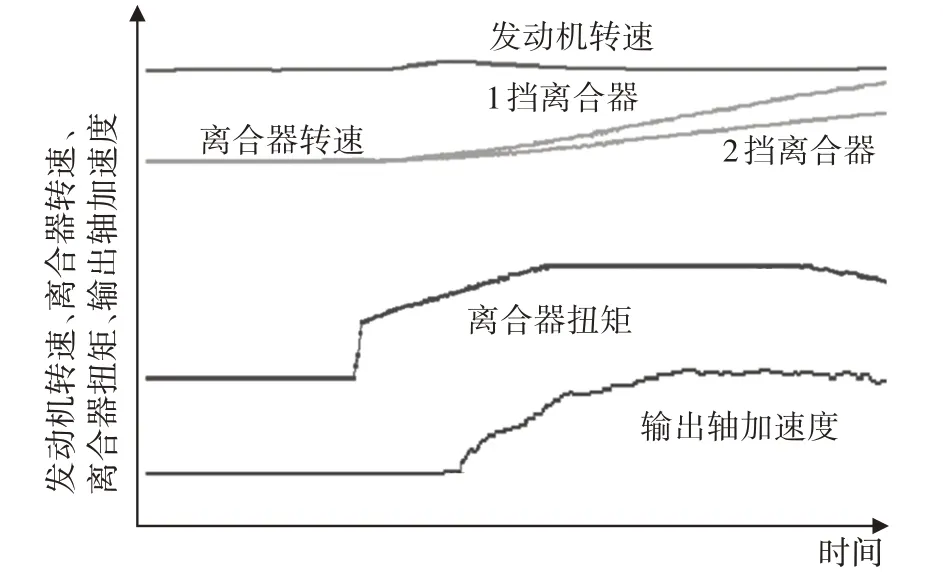
圖6 虛擬標(biāo)定后實(shí)車爬行工況測(cè)試結(jié)果
4.2 起步標(biāo)定仿真結(jié)果
本文主要針對(duì)起步過(guò)程中2個(gè)階段的轉(zhuǎn)速進(jìn)行標(biāo)定。第1 個(gè)階段需要根據(jù)節(jié)氣門開(kāi)度進(jìn)行標(biāo)定,滿足動(dòng)力需求、離合器發(fā)熱、保持發(fā)動(dòng)機(jī)轉(zhuǎn)速在正常范圍等要求,本文主要針對(duì)動(dòng)力性和發(fā)熱量進(jìn)行研究。第2 個(gè)階段主要是平穩(wěn)起步,控制離合器轉(zhuǎn)速加速度不能過(guò)大。采用默認(rèn)標(biāo)定值時(shí)的整車測(cè)試結(jié)果如圖7所示。利用硬件在環(huán)虛擬標(biāo)定平臺(tái)進(jìn)行起步仿真標(biāo)定,將標(biāo)定結(jié)果集成到整車進(jìn)行測(cè)試,結(jié)果如圖8 所示。結(jié)果表明,在標(biāo)定前,由于發(fā)動(dòng)機(jī)目標(biāo)轉(zhuǎn)速接近離合器轉(zhuǎn)速的進(jìn)程過(guò)快,輸出軸轉(zhuǎn)速存在較大沖擊,經(jīng)標(biāo)定后,發(fā)動(dòng)機(jī)目標(biāo)轉(zhuǎn)速和離合器轉(zhuǎn)速接近的速度減緩,輸出軸加速度沖擊變小,數(shù)據(jù)更加適應(yīng)整車。
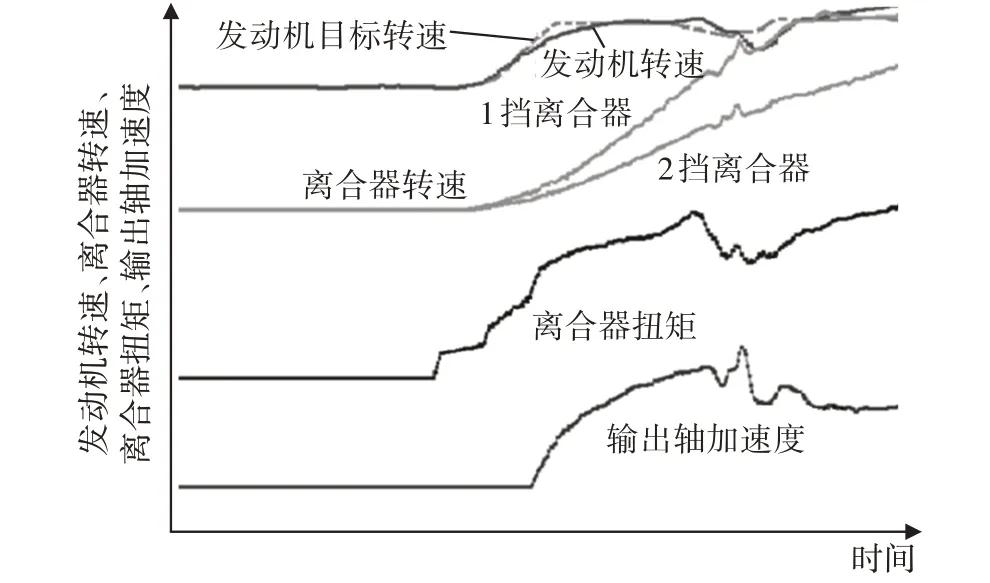
圖7 利用默認(rèn)標(biāo)定值進(jìn)行實(shí)車起步測(cè)試結(jié)果

圖8 虛擬標(biāo)定后實(shí)車起步測(cè)試結(jié)果
5 結(jié)束語(yǔ)
本文完成了混合動(dòng)力專用變速器的電控參數(shù)虛擬標(biāo)定,將獲得的標(biāo)定數(shù)據(jù)與同一開(kāi)發(fā)車輛的常規(guī)標(biāo)定數(shù)據(jù)進(jìn)行比較,虛擬標(biāo)定數(shù)據(jù)比常規(guī)標(biāo)定數(shù)據(jù)更適合整車。與常規(guī)標(biāo)定過(guò)程相比,虛擬標(biāo)定方法不需要進(jìn)行實(shí)機(jī)試驗(yàn),縮短了整車開(kāi)發(fā)周期。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車與新動(dòng)力(2014年2期)2014-02-27 12:10:15
汽車與新動(dòng)力(2013年5期)2013-03-11 16:08:17
