出入立體庫的環(huán)形有軌穿梭車布局設(shè)計(jì)與優(yōu)化
2023-10-20 11:09:26張之臻林樹茂
起重運(yùn)輸機(jī)械 2023年20期
張之臻 林樹茂
1 北京起重運(yùn)輸機(jī)械設(shè)計(jì)研究院有限公司 北京 100007 2 北京市自動(dòng)化物流裝備工程技術(shù)研究中心 北京 100007
3 機(jī)械工業(yè)物料搬運(yùn)工程技術(shù)研究中心 北京 100007
1 研究背景
近年來,隨著我國大力發(fā)展推廣智能化制造產(chǎn)業(yè)的發(fā)展[1],尤其是在自動(dòng)化工業(yè)領(lǐng)域的自動(dòng)化立體倉庫發(fā)展格外迅速。自動(dòng)化倉儲(chǔ)是一種自動(dòng)化、密集化的物流存儲(chǔ)系統(tǒng),該系統(tǒng)集高密度立體貨架、堆垛機(jī)、輸送機(jī)、環(huán)形有軌穿梭車(Rail Guided Vehicle,以下簡稱環(huán)形車RGV)及軟件調(diào)度系統(tǒng)為一體[2]。當(dāng)貨物在出入自動(dòng)化立體倉庫前,需要由環(huán)形車RGV-輸送線協(xié)同作業(yè)才能完成將貨物運(yùn)輸至出入庫堆垛機(jī)輸送線,進(jìn)而完成貨物的出入庫操作[3]。一般情況下,業(yè)主方會(huì)梳理業(yè)務(wù)流,結(jié)合目前業(yè)務(wù)的發(fā)展預(yù)估未來市場需求的變動(dòng),待項(xiàng)目立項(xiàng)后再通過內(nèi)部論證或請咨詢公司進(jìn)行項(xiàng)目的可行性研究,在初步設(shè)計(jì)階段合理梳理出未來立體庫的貨物規(guī)格尺寸、建筑尺寸、效率需求及投資估算等需求[4]。相關(guān)業(yè)務(wù)設(shè)計(jì)者需考慮能力匹配、能力均衡、經(jīng)濟(jì)性、冗余、安全性[5]等原則,結(jié)合項(xiàng)目現(xiàn)場的客觀條件對環(huán)形車RGV-輸送線布局設(shè)計(jì)及優(yōu)化方案進(jìn)行規(guī)劃,供業(yè)主決策方比對分析。相對于傳統(tǒng)模式的單一環(huán)形車RGV,在環(huán)線中增加緩存輸送線是近年來的主要優(yōu)化方式,可增加緩存線在經(jīng)濟(jì)性和帶來效率的提升比例確實(shí)有待考量,且在布局設(shè)計(jì)過程中考量的因素較多,僅憑借經(jīng)驗(yàn)指導(dǎo)實(shí)踐是非常困難的,且得出的規(guī)劃布局未必是真實(shí)的系統(tǒng)最優(yōu)解。因此,建立基于實(shí)際情況的數(shù)學(xué)模型并求解非常有必要,能夠幫助決策者快速得出具有參考價(jià)值的布局比對分析解,可有效減少出入庫作業(yè)總時(shí)間,提高倉儲(chǔ)作業(yè)整體效率,為自動(dòng)化倉儲(chǔ)出入庫區(qū)布局與優(yōu)化提供了理論支持和方法借鑒。
2 自動(dòng)化立體堆垛機(jī)庫出入庫系統(tǒng)特點(diǎn)
1)多目標(biāo)性 自動(dòng)化立體倉庫的出入庫作業(yè)需要權(quán)衡出入庫流量、各環(huán)形車RGV的效率、出庫交付和入庫作業(yè)的時(shí)間要求等多個(gè)目標(biāo)。
2)協(xié)同性 在自動(dòng)化立體堆垛機(jī)倉儲(chǔ)系統(tǒng)中,每個(gè)貨道都有堆垛機(jī),貨物的出入庫作業(yè)需要堆垛機(jī)-輸送機(jī)、環(huán)形車RGV-輸送機(jī)對接后協(xié)同完成。在出庫作業(yè)時(shí),堆垛機(jī)將待出庫貨物從相應(yīng)庫位取出并放置于出庫輸送機(jī),環(huán)形車RGV與輸送機(jī)對接,接取貨物并運(yùn)輸至出庫口的輸送機(jī)上;環(huán)形車RGV將貨物由入庫輸送機(jī)處提取,攜貨物運(yùn)輸至對應(yīng)巷道口將貨物放置于入庫輸送機(jī),再由堆垛機(jī)將貨物運(yùn)輸至具體貨位。
3)復(fù)雜約束 自動(dòng)化立體倉庫出入庫系統(tǒng)受很多復(fù)雜約束限制,其中采用環(huán)形車RGV完成出入庫作業(yè)調(diào)度時(shí),約束包含但不局限于受待出入庫貨物的貨位分布、小車當(dāng)前狀態(tài)、多輛小車路徑擁堵及碰撞等約束的影響。
4)動(dòng)態(tài)性 小車故障、多車擁堵、緊急出入庫任務(wù)的插入都會(huì)加大出入庫作業(yè)的困難程度,造成出入庫系統(tǒng)的動(dòng)態(tài)性。
因此,環(huán)形車RGV-輸送機(jī)組成的出入庫系統(tǒng)的合理化規(guī)劃與設(shè)計(jì)優(yōu)化對減少出入庫作業(yè)總時(shí)間、提高了倉儲(chǔ)作業(yè)整體效率具有重大意義。
3 模型建立
本文以由環(huán)形車RGV-堆垛機(jī)輸送機(jī)組成的出入庫系統(tǒng)為研究對象,通過對比方案同在環(huán)形車RGV中增加輸送機(jī)的方案,分別構(gòu)建函數(shù)對環(huán)形車RGV-堆垛機(jī)輸送機(jī)系統(tǒng)的總成本進(jìn)行測度,構(gòu)建了整數(shù)隨機(jī)規(guī)劃模型,并以基于抽樣平均近似算法對問題進(jìn)行求解。
3.1 假設(shè)條件
1)自動(dòng)化立體倉庫區(qū)巷道均為單伸巷道,所有巷道寬度均一致;
2)自動(dòng)化立體倉庫區(qū)域庫位數(shù)足夠且滿足需求的儲(chǔ)位數(shù),貨物均勻分布在各個(gè)巷道,立體倉庫的出入庫口均在有輸送機(jī)的一側(cè),假設(shè)各巷道的出入庫作業(yè)獨(dú)立且均勻分布,各巷道堆垛機(jī)的復(fù)合作業(yè)效率一致;
3)假設(shè)出入庫效率各為總系統(tǒng)效率的一半;
4)假設(shè)環(huán)形車RGV在彎道處平均速度恒定,環(huán)形車在系統(tǒng)中僅一輛;
5)環(huán)形車RGV在轉(zhuǎn)彎前后的直線段加速度a,直線段初始速度和最終速度均為0,且全程速度均未達(dá)速度上限, 環(huán)形車RGV在直線段的運(yùn)行軌跡如圖1 所示,運(yùn)行時(shí)間t和總運(yùn)輸距離S、加速度a之間的關(guān)系為
6)出入庫口輸送機(jī)自環(huán)形車RGV直線段中間開始均勻?qū)ΨQ排布,數(shù)量一致;
7)增加內(nèi)部輸送線時(shí),僅增加一組出入緩存輸送線,新增輸送線的出入口同系統(tǒng)出入貨口、堆垛機(jī)立體庫輸送機(jī)出入貨輸送機(jī)口對應(yīng);
8)增加內(nèi)部輸送線時(shí),若貨物同時(shí)可走環(huán)線RGV和出入緩存輸送線時(shí),優(yōu)先走出入緩存輸送線。
3.2 自變量、參數(shù)定義、決策變量
1)自變量定義
本文建模中的自變量有:i為貨物經(jīng)環(huán)形車RGV-輸送機(jī)堆垛機(jī)進(jìn)入自動(dòng)化立體庫的第i個(gè)巷道入庫,i∈[1,n1];j為貨物經(jīng)堆垛機(jī)輸送機(jī)-環(huán)形車RGV 運(yùn)出自動(dòng)化立體庫的第j個(gè)巷道出庫,j∈[1,n1];k為貨物經(jīng)入庫輸送機(jī)-環(huán)形車RGV的第k個(gè)入庫口進(jìn)入運(yùn)輸系統(tǒng),k∈[1,n2];u為貨物經(jīng)環(huán)形車RGV-出庫輸送機(jī)的第u個(gè)出庫口運(yùn)出運(yùn)輸系統(tǒng),u∈[1,n2]。
2)參數(shù)定義
本文建模中的參數(shù)有:n1為單深位堆垛機(jī)貨架系統(tǒng)數(shù)量,其中n1={1,2,3,4,…};n2為出庫口數(shù)量或入庫口數(shù)量,其中n2={1,2,3,4,…};a為環(huán)形車RGV在轉(zhuǎn)彎后進(jìn)入直線段的加速度;W為單深位堆垛機(jī)貨架的寬度;L為環(huán)形車RGV直線段的長度;R為環(huán)形車RGV彎道半徑;vCircle為環(huán)形車RGV 在彎道處的平均速度;TTask為完成一次環(huán)形車RGV 與輸送機(jī)或輸送機(jī)與環(huán)形車RGV交接工作所用的時(shí)間;EStoraging為系統(tǒng)入庫效率;ERetrievalling為系統(tǒng)出庫效率;EStorage為堆垛機(jī)貨架系統(tǒng)單一堆垛機(jī)的復(fù)合作業(yè)效率;EInput為單一入貨口輸送機(jī)效率;EOutput為單一出貨口輸送機(jī)效率;Xijku為在具體情景下單次作業(yè)的出庫或入庫量。
3)決策變量
本文建模中的決策變量有:TCircle為環(huán)形車RGV 完成一次彎道行徑所用的時(shí)間;Tij為環(huán)形車RGV在輸送機(jī)-堆垛機(jī)段的運(yùn)行總時(shí)間,入庫貨物經(jīng)環(huán)形車RGV-輸送機(jī)堆垛機(jī)進(jìn)入自動(dòng)化立體庫的第i個(gè)巷道入庫,出庫貨物經(jīng)堆垛機(jī)輸送機(jī)-環(huán)形車RGV運(yùn)出自動(dòng)化立體庫的第j個(gè)巷道出庫;Tku為環(huán)形車RGV在入庫輸送機(jī)-出庫輸送機(jī)間直線段的運(yùn)行總時(shí)間,入庫貨物經(jīng)入庫輸送機(jī)-環(huán)形車RGV的第k個(gè)入庫口進(jìn)入運(yùn)輸系統(tǒng),出庫貨物經(jīng)環(huán)形車RGV-出庫輸送機(jī)的第u個(gè)出庫口運(yùn)出運(yùn)輸系統(tǒng);T2ijku為在具體情景下環(huán)形車RGV-輸送機(jī)系統(tǒng)中間增加輸送線,以提高系統(tǒng)出入庫效率,加快完成出入庫作業(yè)的總時(shí)間;T1為由環(huán)形車RGV-輸送機(jī)系統(tǒng)完成出入庫作業(yè)的總時(shí)間;T2為由增加輸送線-環(huán)形車RGV-輸送機(jī)系統(tǒng)完成出入庫作業(yè)的總時(shí)間;T為由環(huán)形車RGV-輸送機(jī)系統(tǒng)完成出入庫作業(yè)的總時(shí)間。
3.3 模型構(gòu)建
環(huán)形車RGV直線段長度L約束可表示為
為滿足自動(dòng)化立體倉庫堆垛機(jī)系統(tǒng)的出入庫要求,所需要配置的巷道數(shù)量約束,且n1為正整數(shù),其中為向上取整函數(shù),約束可表示為
為滿足環(huán)形RGV-輸送機(jī)出入庫系統(tǒng)的要求,且出入庫效率各為系統(tǒng)總體效率的一半,n2為正整數(shù),其中為向上取整函數(shù),所需要配置的出入庫口數(shù)量約束條件可表示為
根據(jù)式(2)、式(3),可推導(dǎo)出單深位堆垛機(jī)貨架系統(tǒng)數(shù)量n1和出庫口數(shù)量或入庫口數(shù)量n2間的關(guān)系,其中為向上取整函數(shù),具體可表示為
根據(jù)假設(shè)環(huán)形車RGV 在彎道處作勻速運(yùn)動(dòng), 則TCircle可表示為
環(huán)形車RGV 直線段的長度與堆垛機(jī)貨架系統(tǒng)寬度間關(guān)系約束可表示為
3.3.1 環(huán)形車RGV-輸送機(jī)模型構(gòu)建
如圖2 所示,拆解環(huán)形車RGV-輸送機(jī)模型,合理化分解問題,將環(huán)形車RGV的運(yùn)行軌跡劃分為環(huán)形車RGV與輸送機(jī)-堆垛機(jī)段、環(huán)形車RGV與出入庫輸送機(jī)段、環(huán)形車RGV彎道段作為分析研究對象。
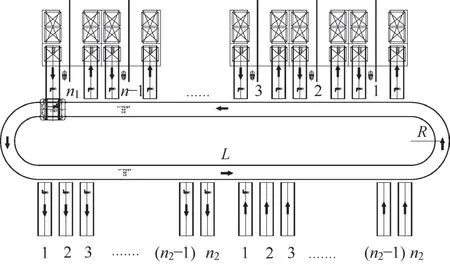
圖2 環(huán)形車RGV-輸送機(jī)示意圖
1)環(huán)形車RGV與輸送機(jī)-堆垛機(jī)段
環(huán)形車RGV與輸送機(jī)-堆垛機(jī)段的運(yùn)行總時(shí)間為Tij,包含入庫貨物經(jīng)環(huán)形車RGV-輸送機(jī)堆垛機(jī)進(jìn)入自動(dòng)化立體庫的第i個(gè)巷道入庫的時(shí)間和出庫貨物經(jīng)堆垛機(jī)輸送機(jī)-環(huán)形車RGV運(yùn)出自動(dòng)化立體庫的第j個(gè)巷道出庫的時(shí)間,其中i∈[1,n1],j∈[1,n1],Tij形成一個(gè)i·j的矩陣,具體可表示為
當(dāng)i<j時(shí),有
當(dāng)i=j(luò)時(shí),有
當(dāng)i>j時(shí),有
由此,Tij可表示為
2)環(huán)形車RGV與出入庫輸送機(jī)段
環(huán)形車RGV在入庫輸送機(jī)-出庫輸送機(jī)間直線段的運(yùn)行總時(shí)間,入庫貨物經(jīng)入庫輸送機(jī)-環(huán)形車RGV的第k個(gè)入庫口進(jìn)入運(yùn)輸系統(tǒng),出庫貨物經(jīng)環(huán)形車RGV-出庫輸送機(jī)的第u個(gè)出庫口運(yùn)出運(yùn)輸系統(tǒng), 其中k∈[1,n2]、u∈[1,n2]、Tku形成一個(gè)k·u的矩陣,具體可表示為
其中,無論k和u的關(guān)系如何,每一個(gè)Tku的表達(dá)式均成立,即
3)環(huán)形車RGV彎道段
根據(jù)式(5),環(huán)形車RGV在彎道處作業(yè)總時(shí)間可表示為
在此情景下,Xijku=2,以環(huán)形車RGV-輸送機(jī)系統(tǒng)總時(shí)間T1為目標(biāo)構(gòu)建函數(shù),得到其表達(dá)式為
3.3.2 環(huán)形車RGV -輸送機(jī)-增加內(nèi)部輸送線模型構(gòu)建
如圖3 所示,當(dāng)增加內(nèi)部輸送線時(shí),根據(jù)假設(shè)僅增加1 組出入緩存輸送線,其長度為2R,位置設(shè)置在環(huán)形車RGV最中間的出入貨口輸送機(jī)對應(yīng)處,此時(shí)緩存輸送線與出入庫輸送機(jī)-堆垛機(jī)相應(yīng)出入庫輸送機(jī)存在對應(yīng)關(guān)系。
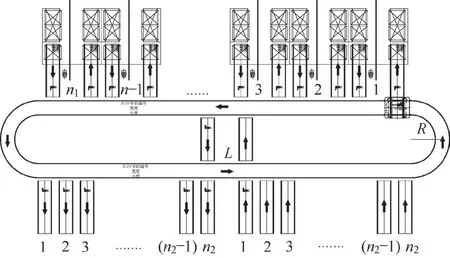
圖3 環(huán)形車RGV-輸送機(jī)-增加內(nèi)部輸送線示意圖
1)在環(huán)形車RGV-輸送機(jī)系統(tǒng)中間增加緩存輸送線,從入庫口輸送線k看,第1 次放在入庫緩存線的入庫貨物k1=1 時(shí),第2 次RGV攜帶的入庫貨物k2∈[1,2,3,…,n2]可利用入庫緩存線,此時(shí)要求環(huán)形車RGV-輸送機(jī)堆垛機(jī)系統(tǒng)的i2≤n1/2 ≤i1,即可利用新增入庫緩存線,此時(shí)Xijku=3。
2)在環(huán)形車RGV-輸送機(jī)系統(tǒng)中間增加緩存輸送線,從出庫堆垛機(jī)-輸送線j看,要求第1 次放在出庫緩存線的出庫貨物j1≤n1/2 時(shí),第2 次RGV攜帶的出庫貨物n1/2 ≤j2≤n1可利用出庫緩存線,此時(shí)要求環(huán)形車RGV-輸送機(jī)系統(tǒng)的u2≤u1≤n2,即可利用新增的出庫緩存線,Xijku=3。
3)基于上述2 種情況,當(dāng)且僅當(dāng)k1=1 ≤k2≤n2、i2≤i1=n1/2、n1/2 =j(luò)1≤j2≤n1、u2≤u1≤n2時(shí),新增的出入庫緩存線均可被充分利用,此時(shí)Xijku=4。
4)除上述情況,其他事件的概率同環(huán)形車RGV-輸送機(jī)模型情況,此時(shí)Xijku=2。
由以上分析可得,T2ijku和T2的表達(dá)式為
將環(huán)形車RGV-輸送機(jī)模型與環(huán)形車RGV-輸送機(jī)-增加內(nèi)部輸送線模型進(jìn)行對比分析,以完成出入庫作業(yè)總時(shí)間最少為目標(biāo)構(gòu)建函數(shù),表達(dá)式為
3.4 基于抽樣平均近似算法的模型求解方法
隨著算例中堆垛機(jī)巷道數(shù)目、出入庫口數(shù)目的增加,情景數(shù)量也將呈指數(shù)增加,很難在短時(shí)間內(nèi)求解該問題并得到大量問題的精確解法,故應(yīng)采用抽樣平均近似算法對問題進(jìn)行求解。該方法對于解決此類問題,尤其是數(shù)量較大的隨機(jī)情景的混合整數(shù)隨機(jī)規(guī)劃問題有較好效果,其能在確保求解精度的前提下大幅縮短求解時(shí)間。該算法的具體求解過程如圖4 所示。
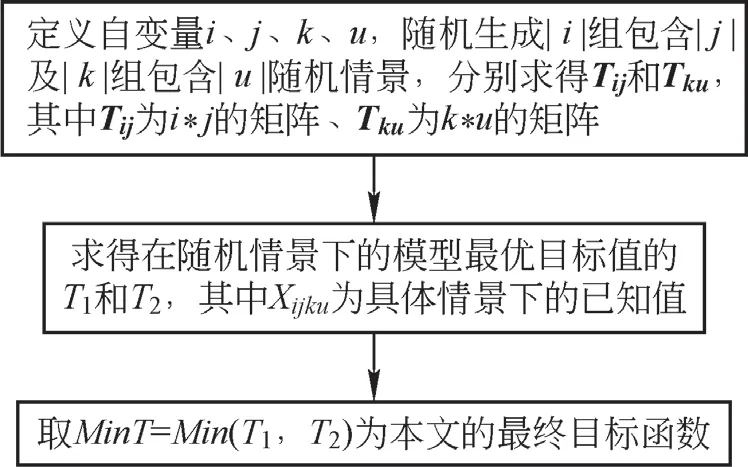
圖4 基于抽樣平均近似算法的模型求解過程
4 項(xiàng)目案例驗(yàn)證
以某自動(dòng)化立體倉庫的出入庫環(huán)形車RGV-輸送機(jī)系統(tǒng)為例,根據(jù)企業(yè)實(shí)際運(yùn)營情況,環(huán)形車RGV-輸送機(jī)模型和環(huán)形車RGV-輸送機(jī)-增加內(nèi)部輸送線模型分別如下圖5 和圖6 所示,出入庫系統(tǒng)的相關(guān)效率如表1所示。

表1 系統(tǒng)效率相關(guān)參數(shù) 托/s

圖5 環(huán)形車RGV-輸送機(jī)模型案例圖
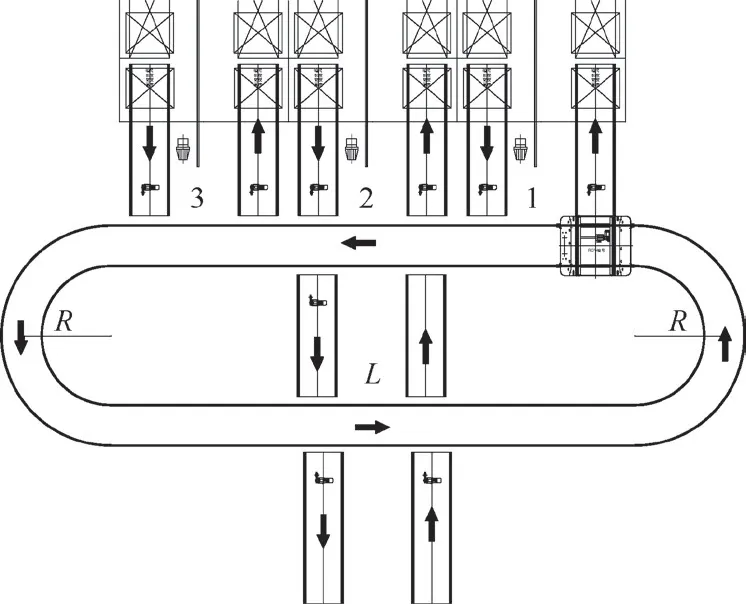
圖6 環(huán)形車RGV-輸送機(jī)-增加內(nèi)部輸送線模型案例圖
根據(jù)式(4)可推理得到n1/n2=3/1 =3,上述實(shí)際情況符合公式推理。其他參數(shù)情況為:環(huán)形車RGV在轉(zhuǎn)彎后進(jìn)入直線段的加速度a=1/3 m/s2,單深位堆垛機(jī)貨架的寬度W=4.2 m,環(huán)形車RGV直線段的長度L=12 m,環(huán)形車RGV 彎道半徑R=1.5 m,環(huán)形車RGV在彎道處的平均速度vCircle=1/3 m/s,完成一次環(huán)形車RGV與輸送機(jī)交接工作所用時(shí)間TTask=8 s。
4.1 環(huán)形車RGV-輸送機(jī)系統(tǒng)求解
對環(huán)形車RGV-輸送機(jī)模型進(jìn)行拆解,將問題合理化分解,將環(huán)形車RGV的運(yùn)行軌跡劃分為環(huán)形車RGV與輸送機(jī)-堆垛機(jī)段、環(huán)形車RGV與出入庫輸送機(jī)段、環(huán)形車RGV彎道段等3 段進(jìn)行分析。
1)環(huán)形車RGV與輸送機(jī)-堆垛機(jī)段
根據(jù)式(11)可推理Tij的表達(dá)式為
2)環(huán)形車RGV與出入庫輸送機(jī)段
環(huán)形車RGV在入庫輸送機(jī)-出庫輸送機(jī)間直線段的運(yùn)行總時(shí)間Tku可根據(jù)式(12)推理得出,其表達(dá)式為
3)環(huán)形車RGV彎道段
根據(jù)式(14)可得環(huán)形車RGV在彎道處作業(yè)總時(shí)間為
由此,以環(huán)形車RGV-輸送機(jī)系統(tǒng)總時(shí)間T1為目標(biāo)構(gòu)建函數(shù),表達(dá)式為
4.2 環(huán)形車RGV -輸送機(jī)-增加內(nèi)部輸送線系統(tǒng)求解
當(dāng)增加內(nèi)部輸送線時(shí),根據(jù)假設(shè)僅增加1 組出入緩存輸送線,其長度為2R,位置設(shè)在環(huán)形車RGV中間部位的出入貨口輸送機(jī)對應(yīng)處,此時(shí)緩存輸送線與出入庫輸送機(jī)-堆垛機(jī)相應(yīng)出入庫輸送機(jī)也存在對應(yīng)關(guān)系,具體如圖5 所示。
由于形車RGV中間部位的出入貨口輸送機(jī)僅1 組,則Tku=T11;在根據(jù)假設(shè)增加內(nèi)部輸送線時(shí),若貨物同時(shí)可以走環(huán)線RGV和出入緩存輸送線,則優(yōu)先走出入緩存輸送線。
1)在環(huán)形車RGV-輸送機(jī)系統(tǒng)中間增加緩存輸送線,僅利用新增入庫緩存線,即每次復(fù)合作業(yè)對于系統(tǒng)來說,完成2 個(gè)貨物的入庫和1 個(gè)貨物的出庫,Xijku=3。從堆垛機(jī)-入庫輸送線i來看,第1 次放在入庫緩存線的入庫貨物i1=2 時(shí),第2 次RGV攜帶的入庫貨物i2∈[1,2],完成1 次出庫j=3。
2)在環(huán)形車RGV-輸送機(jī)系統(tǒng)中間增加緩存輸送線,僅利用新增出庫緩存線,即每次復(fù)合作業(yè)對于系統(tǒng)來說,完成1 個(gè)貨物的入庫和2 個(gè)貨物的出庫,此時(shí)Xijku=3。從堆垛機(jī)-出庫輸送線 看,若第1 次放在出庫緩存線的出庫貨物j1=1 時(shí),要求i=1,則第2 次RGV攜帶的出庫貨物j2∈[2,3];若第1 次放在出庫緩存線的出庫貨物j1=2 時(shí),要求i∈[1,2],則第2 次RGV攜帶的出庫貨物j2∈[2,3]。
3)基于上述2 種情況,當(dāng)且僅當(dāng)i1=2、j1=2,且i2∈[1,2]、j2∈[2,3]時(shí),新增的出入庫緩存線均可被充分利用,此時(shí)Xijku=4。
4)除上述情況,其他事件的概率與環(huán)形車RGV-輸送機(jī)模型的拆解相同,Xijku=2。
另外,同理可根據(jù)T2ijku得到T2,根據(jù)式(17)求解模型可知采用增加環(huán)線方式具有明顯優(yōu)勢,求解得到的結(jié)果為T1=274 s、T2=231 s。
5 總結(jié)
本文考慮由環(huán)形車RGV -堆垛機(jī)輸送機(jī)組成的出入庫系統(tǒng)為研究對象,通過對比方案同在環(huán)形車RGV 中間部位增加輸送機(jī)的方案,分別構(gòu)建整數(shù)隨機(jī)規(guī)劃模型并對環(huán)形車RGV -堆垛機(jī)輸送機(jī)系統(tǒng)總成本進(jìn)行了測度,以基于抽樣平均近似算法對問題進(jìn)行求解,并基于實(shí)際案例對問題進(jìn)行具象化分析,表明研究結(jié)果對實(shí)踐具有指導(dǎo)意義。
為了更加貼近真實(shí)情況,采取更復(fù)雜的分布擬合出入庫的實(shí)際情況;采取更多維度對目標(biāo)函數(shù)進(jìn)行約束,以更貼近于環(huán)形車RGV -輸送機(jī)出入庫系統(tǒng)運(yùn)行情況;采取更為豐富的求解方法達(dá)成最優(yōu)化問題求解。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
