基于AMCUSUM 的道路交通事件檢測方法
2023-10-21 09:01:26齊德全魏思琪
長春理工大學學報(自然科學版) 2023年5期
關鍵詞:檢測
齊德全,魏思琪
(長春理工大學 數學與統計學院,長春 130022)
統計過程控制(Statistical Process Control,SPC)是保證產品與服務符合規定的要求的一種質量管理技術,可以為“優質”提供質量技術上的指導與幫助。SPC 的一個有效工具是控制圖,包括適用于檢測大漂移的休哈特(Shewhart)控制圖,適用于檢測中小漂移的累積和(Cumulative Sum,CUSUM)控制圖與指數加權滑動平均(Exponentially Weighted Moving Average,EWMA)控制圖。目前SPC 不僅被廣泛應用于工業生產過程,而且也被用于醫療器械[1]、電子元器[2]、煙草生產[3]及圖像處理[4]等諸多領域[5-6],其研究成果和應用成果已十分豐富,并取得了很好的社會效益和經濟效益。
在智能交通領域,CUSUM 控制圖被大量國內外學者廣泛應用于交通事件檢測。目前對于交通事件的檢測,除了視頻檢測這種直觀檢測外,還有基于固定線圈檢測器或浮動車技術展開的研究。基于固定源數據的交通事件檢測大多基于路面的點數據,如交通流量、速度、占有率等,典型的方法有加利福尼亞算法[7]、標準偏差算法(SDN)[8]和CUSUM 控制圖[9]等。典型的基于移動源數據的交通事件檢測方法有TRANSMIT算法[10]與CUSUM 控制圖[11]等。這里所用的CUSUM 控制圖都是一元的或多元CUSUM 的復合,沒有用到變量間的相關性。更多的研究方法見綜述文獻[12]。
對CUSUM 控制圖,當設計參數是實際漂移大小的一半時,CUSUM 控制圖的表現最佳,當實際漂移大小不是設計參數所考慮的情況時,CUSUM 控制圖會有很糟糕的表現。但在實際應用過程當中,很難準確地知道漂移的大小。為了解決這一問題,文獻中提出了具有自適應的CUSUM 控制圖[13],即控制圖參數在整個監控過程當中不是一成不變的,而是由觀測值來決定。這就使得過程漂移未知時,控制圖仍有非常好的表現。
針對以上兩個問題,建立了自適應的多元CUSUM 控制圖(AMCUSUM)用于基于固定源數據的交通事件檢測。借助VISSIM4.3 軟件模擬交通數據,把所提出的方法與經典的加利福尼亞算法和SDN 算法進行比較,統計模擬表明所提出的方法檢測效果較好。最后,利用2015 年杭州市上塘高架至中河高架的實測數據對AMCUSUM 方法進行了實證分析,效果優于加利福尼亞算法和SDN 算法。
1 基于AMCUSUM 控制圖的交通事件檢測
基于固定源數據的交通事件檢測大多基于交通流量、速度、占有率等數據,有文獻[14]研究表明交通流服從正態分布。假設用于交通事件檢測的數據來自p元正態總體Np(μ,Σ) 。在每個時刻t,根據樣本Xt監控以下假設H0:μ=μ0,H1:μ≠μ0。參考Dai 等人[15]提出的自適應多元CUSUM 控制圖,建立了如下的AMCUSUM 方法。當數據非正態時,中心極限定理保證了該控制圖也有一定的監控效果。
首先,計算指數加權滑動平均(EWMA)統計量為:
其中,e0= 0(t= 0);r∈(0,1) 是光滑參數,r越小對監控小漂移越有效,越大對監控大漂移越有效。然后估計發生實際漂移的大小:
其中,λmin為事先給定的感興趣的最小漂移量。(λt)2為:
再把設計參數k*t>0 取為實際漂移大小的一半,即,計算多元CUSUM 統計量:
當yt*>H*時,AMCUSUM 控制圖發出過程失控的警報。此時應采取相應解決措施,避免交通事件給道路造成嚴重堵塞和二次事故的發生。其中,H*是控制線,是k*t的遞減函數,除以相應的值來調整yt*,使得控制線H*的值接近于1。
交通事件的檢測步驟為:
(1)車輛檢測器傳輸實時數據,進行適當的數據處理。
(2)計算AMCUSUM 監控統計量,當統計量大于預先定好的閾值H*時,觸發交通事件預警報。
(3)確認現場是否發生交通事件,若發生則立即派出救援,若沒有發生,預警報解除,重新回到步驟(1)進行檢測。
針對上述步驟繪制交通事件檢測處理流程,如圖1 所示。
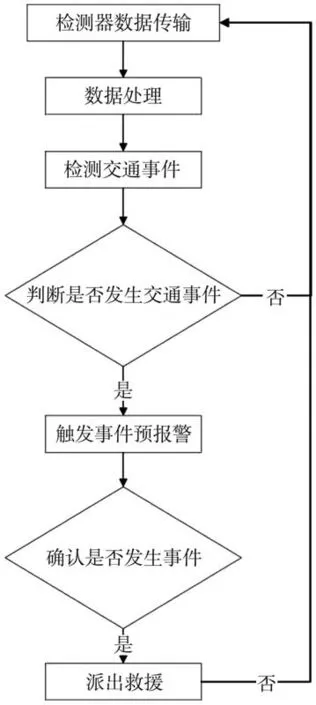
圖1 交通事件檢測處理流程
當發生交通事件時,道路上的交通狀況發生改變,車流占有率也會隨之改變,此時就會在車流中形成可以傳播的交通波,也稱之為車流波。車流波根據前后區域的占有率和流量變化,主要分為集結波、消散波、啟動波和停止波。道路上的交通量存在時空相關性[16],根據交通波動理論,建議選取道路上游和下游在同一時刻的車輛占有率的差和車輛速度的差兩個變量進行監控。這樣不僅可以放大交通事件對車輛占有率和車輛速度的影響,還可以達到把事件結束后車流消散過程產生的消散波抵消掉的目的,而且可以降低車流量早高峰或晚高峰帶來的影響。
2 仿真與分析
目前,國內外常用的事件檢測評價指標有檢測率(DR)、誤報率(FAR)和平均檢測時間(MTTD)。將這三個指標結合,通過統計模擬來比較所提出的AMCUSUM 方法、經典的加利福尼亞算法和SDN 的算法性能。借助VISSIM4.3 軟件進行實驗仿真,VISSIM 是一種微觀的、基于時間間隔和駕駛行為的仿真建模工具,用以城市交通和公共交通運行的交通建模。由于交通事件造成的堵塞情況會受到正常情況下車流量大小以及交通事件發生位置的影響,根據這兩個變量設置不同的道路情況,分析交通事件檢測方法在不同情形下的檢測效率。
仿真實驗設定道路長度為1 000 m 的單向3車道,車道寬度為3.5 m,在道路200 m 和800 m處分別設置3 個檢測器,間隔為600 m,設定事故發生地點在上下游檢測器之間,檢測器用于記錄事故發生地點上、下游各車道的交通流數據,如圖2 所示。

圖2 檢測器布置示意圖
在仿真實驗中,大小型車的比例分別為10%和90%,對不同車型的期望速度進行參數設置,通過設置停車位和減速帶模擬交通事件,設定事件發生時造成兩車道堵塞,對路段總體的通行能力影響為67%,道路中輸入的交通流量分別為高峰(4 000 veh/h)和平峰(2 000 veh/h),事故發生路段位置分別為前中段(距上游檢測器180 m)和中后段(距上游檢測器420 m),事故持續時間為20 min。高峰和平峰兩種交通流量在無交通事件下各運行20 次,分別計算上下游的占有率差和速度差,估計兩變量在系統可控時的均值向量和協方差陣。在每種交通事故狀態下,設置仿真參數的隨機種子為100,每種情況仿真100 次,這樣通過VISSIM 仿真共獲得400 組原始的交通檢測數據,前15 min 為路網預熱,從第15 分鐘開始記錄數據,每隔30 s 記錄一次數據,每種情況各運行1.5 h。
綜合考慮交通事件導致均值向量偏移量的大小,設定AMCUSUM 控制圖的偏移范圍(λmin,λmax)為(0.5,2.5 ),取,光滑參數r= 0.2。采取蒙特卡羅法模擬10 000 次,取閾值H*= 1.058 時使得可控時的平均運行長度ARL0=200。加州算法是雙截面算法,當交通事件發生時,上游檢測器占有率增加,下游檢測器占有率減小,對上下游占有率進行三次測試,當交通事件導致的交通流參數變化導致三次測試均大于閾值時模型發出警報。標準偏差算法(SDN)通過判斷交通參數的變化率是否大于指定的閾值來檢測交通事件,當超過閾值時報警。對上述算法進行同樣的仿真實驗,分別模擬道路中輸入的交通流量為高峰(4 000 veh/h)和平峰(2 000 veh/h)的情況,得出的對比結論如表1 所示。分別模擬交通事件發生位置在道路前中段和中后段的情況,得出的對比結論如表2 所示。
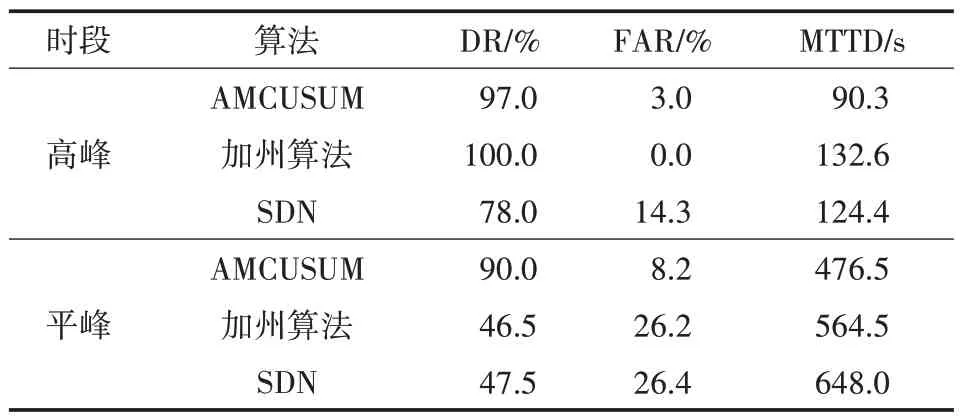
表1 不同時段不同車流量下算法的效率對比

表2 不同事件發生地點下算法的效率對比
從表1 可知,所有算法高峰時段的檢測效果均優于平峰時段。高峰時段的車流量大,當發生交通事件時,更容易發生交通擁堵,造成車輛的排隊現象,交通流參數的均值向量變化明顯,故檢測率高、誤報率低且平均檢測時間短,可以快速檢測到事件的發生。而平峰時段的車流量小,模型的檢測率降低,誤報率升高,總體效率受到很大影響。
從表2 可知,所有算法前中段發生交通事件的檢測效果優于中后段。可以看出,當前中段地點發生交通事件時,即使在平峰時段,也依舊擁有高檢測率、低誤報率和較低的平均檢測時間。而若在中后段發生交通事故時,當交通堵塞引起的道路通過能力不能使得低車流量時段發生排隊現象時,檢測率相比前中段降低很多,誤報率升高,且平均檢測時間過長,檢測效果不理想。
從上述對比實驗的結果可以看出在交通量處于平峰時段時、交通事件發生在檢測器間道路的中后段時,加州算法和SDN 檢測率明顯降低,誤報率明顯升高。以平峰情況為例,加州算法和SDN 法的檢測率均不到50%,而誤報率達到了25%以上,且檢測時間比AMCUSUM 方法更長。綜合比較,基于AMCUSUM 的檢測方法不論在何種情況下都能保持較高的檢測率、較低的誤報率和較短的檢測時間,可以認為基于AMCUSUM的檢測方法檢測效果優于加州算法和SDN 方法,檢測效果更好。
3 實證分析
選取杭州市上塘高架至中河高架路段上3個交通微波檢測器4 個月的(2015 年7 月12 日至11 月22 日)實測數據,數據來自Openits 聯盟官網,數據包含車道上車流量、占有率和速度,數據采集間隔為5 min。微波檢測器的位置圖如圖3 所示。人工篩選出在這區域4 個月內的40 起交通事故,部分事故情況如表3 所示。
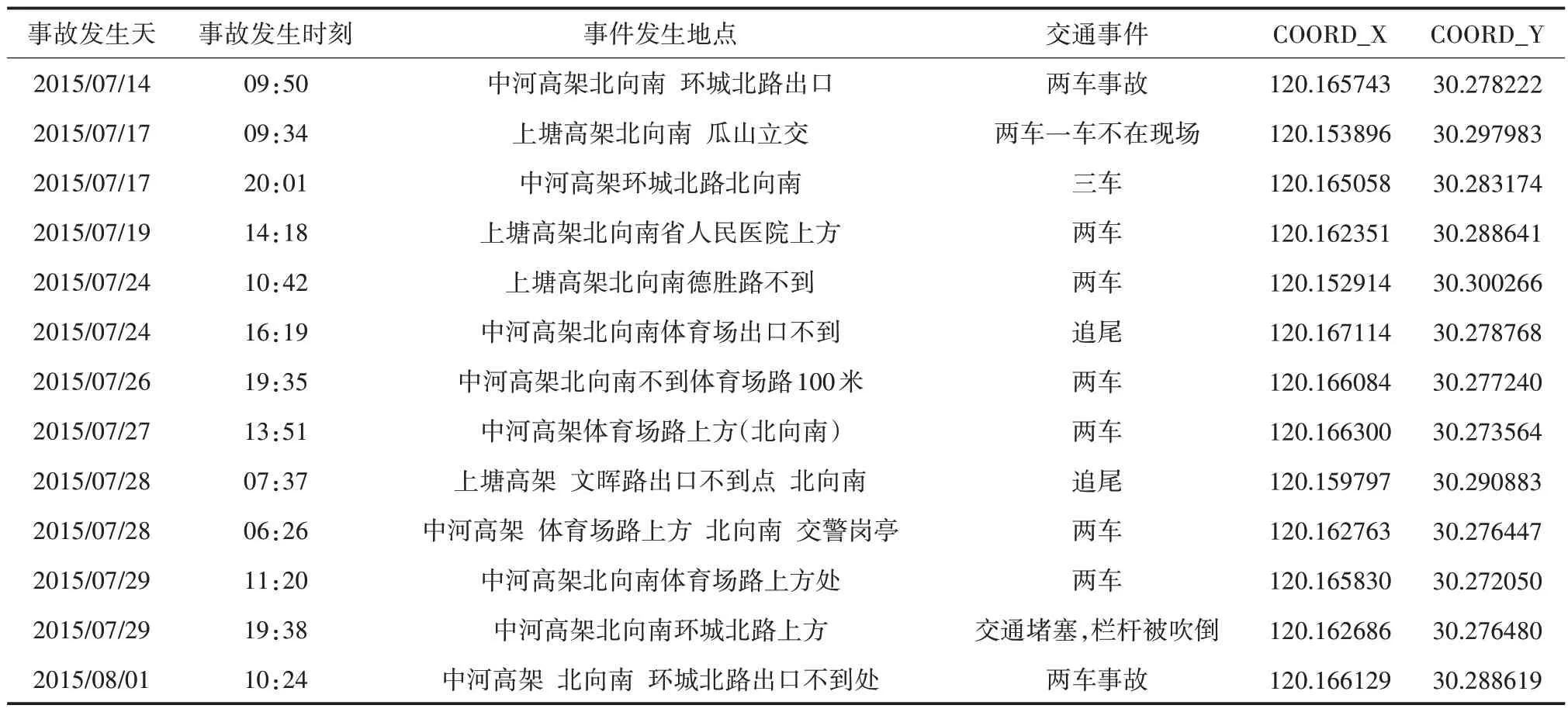
表3 部分事故信息

圖3 微波檢測器位置
經過分析數據可知,城市道路交通流屬于間斷交通流,一般會在15~60 min 內保持一個比較穩定的狀態,在工作日和休息日的某些固定時段會分別呈現大致相同的交通流趨勢,但每天的交通流數據具有唯一性,將以往同時段的交通流數據結合實時的路段車流情況,以此來估計道路正常狀態下的占有率和速度數值,當路段的交通流處于穩定狀態時進行道路交通事件檢測。由于數據的采集間隔為5 min,時間間隔較長,故不考慮檢測時間這一指標。經過對杭州市上塘高架至中河高架路段上的實際數據進行分析,估計出過程可控時的協方差陣Σ 為,進一步得出AMCUSUM 方法、加州算法和SDN 算法的檢測率分別為72.5%、42.5%和62.5%。由實證分析可知,所提出的AMCUSUM方法優于經典的加利福尼亞算法和SDN 算法。
4 結論
基于固定源數據的交通事件檢測大多基于路面的點數據,如交通流量、速度、占有率等,典型的方法有加利福尼亞算法、標準偏差算法(SDN)和CUSUM 控制圖。現有的基于CUSUM 的道路交通事件檢測方法都是一元的或多元CUSUM 控制圖的復合,沒有用到變量間的相關性,而且檢測效果受到設計參數的顯著影響。通過分析交通事件發生與結束過程后向上下游傳遞的車流波狀態,選取上下游車輛占有率差和速度差作為監控變量,建立了自適應的多元CUSUM 的道路交通事件檢測方法(AMCUSUM)。通過VISSIM 軟件進行仿真,對道路交通事件進行檢測,可以得出以下結論:
(1)道路上車流量越大,模型的檢測時間越快,效果越好,交通事件發生位置位于兩檢測器間路段中上游時的模型監測效果優于中下游。
(2)基于AMCUSUM 控制圖的檢測效果優于加州算法和SDN 方法,擁有更高的檢測率、更低的誤報率和更短的檢測時間。
當車流量較小且事件發生位置距離上游檢測器較遠時,AMCUSUM 的平均檢測時間較長。如何提高AMCUSUM 的檢測效率和基于移動源數據的交通事件檢測方法是下一階段的研究目標。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48