新科技革命先導技術差距測度與“三跑”趕超機制研究
2023-10-23 03:26:54周松蘭伍文中
浙江工商大學學報 2023年4期
關鍵詞:科技
周松蘭,伍文中
(廣州大學 經濟與統計學院,廣東 廣州 510006)
一、 引 言
黨的二十大報告提出,“開辟發展新領域新賽道,不斷塑造發展新動能新優勢”,指明了響應新科技革命并創造新機會窗口的“非對稱”趕超創新躍遷路線。當前,以人工智能、大數據、云計算、物聯網、3D打印、智能機器人等為代表的新科技革命先導技術相生融合集成創新,深刻而廣泛地改變著人類生產生活方式和科技創新范式,開啟發展新領域新賽道和重塑躍遷領跑新動能新優勢的機會窗口。
中國經過多年持續努力和實踐積累,在新科技革命先導技術諸領域奠定獨特優勢,并抓住百年未有之大變局對機會窗口期做出積極的戰略響應。習近平總書記發表科技強國系列論述,形成了中國科技創新由跟跑向并跑、領跑轉型的戰略指導思想[1],其中強調,力爭實現我國整體科技水平從跟跑向并行、領跑的戰略性轉變,在重要科技領域成為領跑者[2],并進一步號召,勇于進行理論探索和創新[3]。同時,由跟跑向并跑、領跑轉型的戰略部署頻現于諸如《國家創新驅動發展戰略綱要》《國家信息化發展戰略綱要》等科技戰略綱領性文獻,標志著中國創新趕超躍遷領跑戰略已經提上日程。有效實施新趕超暨轉型躍遷領跑戰略,首先要知己知彼,亟須科學監測新科技革命先導技術差距和跟跑、并跑、領跑(簡稱“三跑”)態勢,在實證基礎上更需深入研究和優化由跟跑向并跑、領跑轉型的戰略和策略,增創新動能新優勢。
關于“三跑”趕超的學術研究,國外文獻以Perez和Soete(1988)[4]及Lee和Malerba(2017)[5]為代表的機會窗口和趕超周期學說主導國際理論前沿,但也存在對技術霸權“盲人摸象”式評解,缺少并跑階段的理性研究。國內對于科技趕超的研究,一則缺乏對后來者追趕進入與在位者勢均力敵、趕超反趕超拉鋸持續較量漫長過程——后來者創新能級臨界質量躍遷,同時在位者陷入“在位者陷阱”關鍵階段即并跑階段的區分和研究;二則缺乏對于保持領跑地位以及被新領跑取代即領跑階段的區分和研究,缺乏“三跑”趕超全周期的系統認識,不利于新時代新趕超的科學規律性探索。
綜上,本文旨在研究新科技革命下新趕超的理論機制和創新路線優化。理論維度,揭示跟跑、并跑和領跑之間的階段聯系和趕超全周期創新機制。實證維度,建立新科技革命先導技術測度體系并用以計量得出跟蹤比較曲線。兩者結合,厘清差距,科學解構,著重并跑,提出全周期創新路線優化建議。
本文的貢獻在于,為趕超理論研究增添新思維以資后發經濟體趕超再創新優勢,同時為認識中國新科技革命先導技術進展和應對挑戰提供新的整體視角和優化見解,以促進新科技革命先導技術新趕超戰略有效實施和打贏關鍵核心技術反霸權“卡脖子”攻堅戰。
二、 文獻綜述
(一) 關于“三跑”趕超的國外文獻綜述
國外關于“三跑”的研究,側重于對領導者、領導地位、追隨者、落后者、模仿者的研究。其中涉及領導者、領導戰略和領導地位研究,大致歸類于中國語境的領跑范疇,這類研究比國內早且豐富系統;其所謂的追隨者、落后者、模仿者,與中國語境跟跑者接近,但較少針對并跑范疇的專題研究。相關文獻大致可歸納為以下三類。
第一,領跑與跟跑“均衡”論。Smeets和Bosker(2011)[6]及Smrkolj和Wagener(2019)[7]研究認為,領導者喜歡OFDI而落后者通過FDI尋求技術,歐美發達國家企業與東亞發展中國家企業,應通過這種技術溢出與接受的“愿打愿挨”有利于技術擴散,可阻滯趕超并形成與跟跑者利益“納什均衡”,道破領跑之道保健的秘訣。Blazsek和Escribano(2016)[8]研究美國企業,則認為專利創新領導者到追隨者之間存在正向動態溢出效應,主張不分你我的創新可產生更高比例的專利。
第二,領跑者能力和優勢劣勢論。Sabatier和Chollet(2017)[9]提出,新技術開拓與科學生產有先發優勢也有先發劣勢,先發更具風險也更有利可圖。Tellis和Golder(1996)[10]、Mowery和Nelson(1999)[11]觀點:企業保持市場領導地位,原始創新、資源、規范、入市時機和品牌能力都重要;要獲得國家領跑地位,資源、制度、市場、技術創新、政府政策等,都要領先和強于競爭對手。Villanueva和Solís(2013)[12]認為,研發者先進入無人區會有回報,但不是多數而是少有成功,即便初始獲得優勢并不一勞永逸。
第三,追趕周期與機會窗口研究。Lee和Malerba(2017)[5]在系統跟蹤基礎上,進一步提出追趕周期、技術窗口、需求窗口、制度窗口等理論,指出跟跑者只有發展出高水平創新能力獲得研發和生產話語權并利用好機會窗口才可能成為領導者,否則會落入“中等收入陷阱”;領跑者故步自封,不能優化技術創新措施,不進則退即使沒犯明顯“錯誤”也會失去領跑地位。Chandy和Tellis(2000)[13]的現任者詛咒論即“在位者陷阱”說指出,處于領跑的大企業,往往固守陳規不重視激進創新,會被創新活躍、小而強的跟跑企業所取代。Giachetti和Marchi(2017)[14]、Kang和Song(2017)[15]、Morrison和Rabellotti(2017)[16]、Vértesy(2017)[17]等學者從手機、相機、葡萄酒、飛機、半導體存儲器等行業,用以分析、檢證和豐富上述理論,進一步認為機會之窗打開的短暫期間,領導者和追隨者及每個競爭者都像“初學者”;領跑者資源、能力優越但資本沉淀,故易進入原技術依賴“陷阱”;技術不是追趕充分條件,機會之窗和戰略選擇是追趕先決條件;產業出現新技術經濟范式、市場變化和新消費興起、法規政策重大修改,跟跑者則有可能超車。
綜上,領跑者的能力來源、優勢和領跑者如何保持能力優勢“在位詛咒”等理論,領跑者追求的阻止跟跑者形成所謂的利益“均衡”理論,尤其揭示領跑者和跟跑者更迭的追趕周期與機會窗口理論,正是國內研究應急需關注但實際上是十分欠缺的學術短板。
關于適合創新領跑的制度條件,國外文獻出現呼應人工智能全球化時代的亮點。Stiglitz(2015)[18]、Korinek和Stiglitz(2021)[19]著眼全球并基于人工智能大勢提出,什么樣的社會經濟制度最有利于創新領跑與跟跑均衡,回答是能夠支持促進創新并確保由此增長的利潤得到廣泛分享的制度;怎樣的領跑模式最有利于創新即最受歡迎并可持續,即顧及多數人的利益和民眾福祉的模式,而不是領跑的“超級明星”企業和“超級明星”國家通過壟斷技術租金和數字殖民而獲得超級壟斷利潤的掠奪性領跑模式。新時代人類命運共同體要求和諧的、新型領跑與跟跑者普遍受惠成為“三跑”研究的前途焦點。
(二) 關于“三跑”科技趕超的國內文獻綜述
相比國外,國內相關“三跑”科技趕超的研究較零散,本文選擇CNKI中國知網學術文獻總庫期刊文獻,利用其輸出格式及參考文獻管理軟件,以“跟跑、并跑、領跑”為檢索詞,檢索截至2021年7月20日共得到4228篇文獻。自20世紀90年代有企業技術創新策略方面的文章提及對于國外技術是否跟跑的科技語境以后,至2013年隔年間或出現單篇相關文章。2014年習近平在中國科學院第十七次院士大會、中國工程院第十二次院士大會上的講話,開啟了科技創新從跟跑向并跑、領跑轉型戰略思想和語境結構科學表征之先河,自2014年開始“跟跑、并跑、領跑”相關文獻出現陡然增長,從幾十篇至今達千篇及以上,并在連續保持快速上升勢頭(見圖1)。
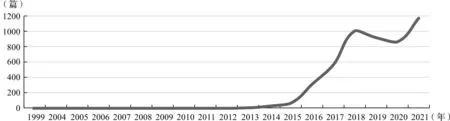
圖1 中國知網學術文獻總庫與“跟跑、并跑、領跑”科技語境相關文獻發展趨勢圖
相關文獻的主題分類顯示,最多的是研究習近平科技創新躍遷戰略思想的文獻126篇,高質量發展123篇、科技創新99篇、新時代86篇、創新驅動47篇、改革開放37篇、人工智能35篇、數字經濟33篇、科技強國29篇,均提及“三跑”,見圖2。
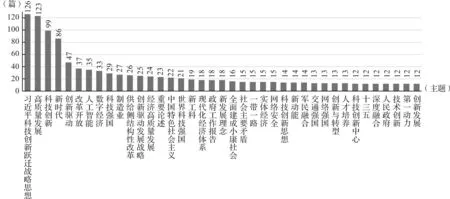
圖2 中國知網學術文獻總庫“跟跑、并跑、領跑”相關文獻主題分類統計
涉及新科技革命先導技術“三跑”的國內文獻,一是研究起步較晚,2014年正式提出科技“三跑”戰略后相關文獻漸有增多;二是內容限于科技領軍專家、學者觀點或政界、科技界戰略層面[20-25],論述多以倡議為主,當然其中不乏洞見,諸如,楊衛(2017)[21]從跟跑到領跑的歷史性轉身論,提出讓一個國家一舉成為領跑者的顛覆式技術創新,第一是里程碑式進展,第二是源頭式發現,第三是顛覆性發現,第四從理論到技術的新貫穿,從重要性和可能性預測中國從跟跑到領跑的技術領域和歷史性跨越;三是學術研究未能跟上政府規劃和科技“三跑”戰略對理論研究支撐的需求,諸如,劉慶齡和曾立(2022)[26]言及“三跑”并存,但缺乏理論支持,忽視“卡脖子”技術危機在跟跑階段已經潛在,四是研究較多限于后趕超為止,諸如,竇錢斌(2020)[27]主張后發國家技術趕超分兩階段,一階段技術進步主要表現為資本流入,技術外溢特征,二階段技術進步則表現為勞動力要素價格相對抬升倒逼技術進步特征,黃寧和張國勝(2015)[28]的后趕超論說。伴隨后發國家對技術前沿知識日益靠近,一方面企業技術學習的邊際效應日趨遞減,另一方面發達國家不愿意向技術追趕者轉移前沿技術與知識,在此背景下后發國家的技術趕超只能依賴自主創新,并呈現出明顯放緩的發展趨勢,即進入了后趕超時期。前述二者都判斷當前中國已經進入趕超第二階段或后趕超,如圖3所示,在時間維度上僅相當于進入并跑階段,對于趕超從量變躍遷質變的關鍵并跑階段及領跑階段,不僅涉及甚少更是缺乏全周期系統研究。
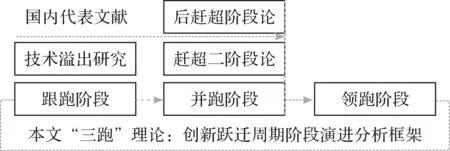
圖3 傳統理論與“三跑”創新理論的聯系與區別
三、 后發經濟體與先發經濟體的“三跑”趕超機制
(一) 后發經濟體趕超先發經濟體的“三跑”階段演進
后發經濟體(LDE)追趕先發經濟體(FME),歸根結底是LDE通過創新能量的積累和階段性質量躍遷,不斷收斂技術差距,超越FME的過程,其間經過跟跑、并跑階段的技術創新能級提升和社會技術系統轉型,躍遷至領跑階段。
如圖4所示,縱軸代表創新能級和技術水平,A0為基態和初級技術,B0-A0為低能態和溢出技術,C0-B0為高能態和主導技術,CX-C0代表優化高能態和先導技術及新窗口技術;橫軸代表T時間段,Ta0至TB時段為跟跑階段,TB至TC為過渡性技術窗口期,TC至TL為并跑階段,TL時點后為領跑階段。
若a為LDE在Ta0時點上所處的初級技術水平即創新能級的基態,a*為FME溢出技術的下限,b為溢出技術的上限,a*和a之間的原始差距為Y0,當LDE在趕超戰略的激勵下,經過技術培訓和技術交流等途徑,不斷提高學習能力至A點時,即與a*在同一條A0水平線上,則具備了一定的學習技術的條件而達到技術模仿的門檻,此時完成創新能級的初步躍遷,使Y0達到0。在TF至TB的跟跑階段LDE創新能量處于低能態,而隨著其技術水平不斷提高,達到B點,與溢出技術的上限b在同一條水平線B0上,即接近模仿臨界,也就是并跑的門檻。此時再無可模仿的溢出技術,還會面臨FME的打壓或技術斷供,其中連接B點和bc點的Z線,被稱為最后最小差距。這是LDE實現創新能級的第二次重要躍遷時期,尤其在模仿臨界B點上,再次面臨自主創新還是等待溢出技術再模仿的路線選擇,短期行為者極可能落入“跟跑—落后—跟跑”的跟跑陷阱GS而被鎖定價值鏈低端,其趕超周期到此中斷;若起始就選擇自主創新為主模仿為積累創新能量為輔助的路線,且當出現成熟技術領跑者自囚“在位陷阱”即保守bc技術水平不思激進創新的客觀條件,標志出現成熟技術窗口期,新科技革命打開新技術窗口,都有利于自主創新跟跑者躍入新趕超階段。
對LDE而言,到了并跑階段值得注意的是,既要克服跟跑技術軌道依賴的慣性,同時又要在合適的條件下以學習外來技術輔助自主創新,既要與并跑對象激烈競爭又要與其雙贏合作,由此會出現并跑者的主要技術創新指標和市場指標反復拉據反復換位的現象,導致TB至TC時點的實際界限十分模糊,原后發經濟體LDE的跟跑者可能從已有技術的潛在窗口突破至C躍遷點,在原軌道上實現趕超,也可能通過新技術窗口換道超車在C1躍遷點上實現新軌道趕超,通過此次最關鍵的創新能級躍遷,躍入領跑階段。如果原先發經濟體FME的領跑在位者墨守陳規、不求創新則落入“領跑者陷阱”LS,失去其領跑地位。
領跑作為創新能級周期性演進的高級階段,不是僅靠屆時飛躍就能到達的,在“三跑”全周期中跟跑是基礎積累過程,經過并跑反復較量全面提升創新能級從量到質躍遷過程,領跑是多次創新躍遷的結果,“三跑”之間相互促進、緊密關聯,其中關鍵節點是創新躍遷。“三跑”趕超的速度及效率均取決于創新能級躍遷能力的高低。LDE的初期跟跑旨在積累創新能力,在達到模仿臨界B點以前就選擇自主創新為主模仿為輔的路線,抓住機會窗口突破跟跑的依賴,向并跑轉型,且到并跑階段克服原跟跑的慣性,完成技術系統的生態轉型,到領跑階段能夠不斷涌現顛覆性創新而保持領跑加力。各階段相生關聯,梯度轉型,能級躍遷,螺旋演進,整體構成“三跑”趕超創新生態系統周期演化機制。
(二) 后發經濟體趕超先發經濟體的“三跑”機制解構
“三跑”機制由各階段創新機制和各階段結構影響機制等系統有機構成。
第一,跟跑階段機制。主要由學習機制、后發優勢臨界、引導機制或政策窗口、低端鎖定或跟跑陷阱、跟跑慣力和未雨綢繆創新機制等諸多影響構成,可歸結為不同選擇的因果機制。在先進地區的生活水平、消費時尚、優質產品和先進企業的豐厚利潤等榜樣力量影響下,后進地區、后進企業產生模仿產品、引進技術或外資,形成學習技術的訴求和行動即為學習機制。這種學習在一定階段和一定程度上有節省研發資金、時間等成本優勢,但隨著可學技術趨近于零或被斷供即達臨界優勢不再,是為后發優勢臨界。政府對學習機制提供補貼等“輸血”機制的政策和獎勵、創新券、政策采購等“造血”機制的政策供給,從而影響企業行為即為引導或政策窗口機制。后進企業能引進和學習到的技術通常是一般技術而淪為加工廠,長期沒有自主技術會被鎖定“引進、落后、再引進、再落后”的惡性循環,這也正是產業價值鏈高端霸權者所求的低端鎖定機制或稱跟跑陷阱機制。長期跟跑慣性沉淀思維底層漫浸于技術政體,消費喜歡“原裝進口”,政績必看“招商引資”,企業偏好“短期行為”,文章熱衷“技術溢出”,助推跟跑超期理直氣壯,嚴重沖擊躍遷領跑自信,是亟須克服的跟跑慣力機制。所謂“卡脖子技術”、關鍵核心技術或高端芯片斷供等在并跑階段出現的嚴重問題,在跟跑的第一天甚至之前就已經存在,諸如政府、研發機構、企業、個人在數字化之始就都采用微軟視窗系統,數字創新基礎工具受制于人。一個地區或企業進入跟跑,選擇只為節省成本和短期賺加工費則可能會囚入跟跑陷阱機制;目標和路線選擇始終為有一天實現領跑而學習,不斷積累創新能量就有望躍遷并跑進而領跑;跟跑同時就開始“卡脖子技術”和關鍵核心技術的研發,不斷對可能發生的原件斷供等危機做出多個應對預案,諸如華為的“紅隊策略”,即未雨綢繆創新機制。總而言之,跟跑的目標路線選擇不同結果也大不相同,所以跟跑階段覆蓋著不同選擇的因果機制。
第二,并跑階段機制。主要由跟蹤監測、師夷之長制夷、應對技術霸權打壓、大中小企業協同、知識產權創新生態機制、人才高地機制、戰略轉型優化機制、創新工具國產化、技術創新與社會創新相生機制和舉國體制暨并跑沖刺機制等系統有機構成。
針對并跑階段趕超與反趕超形勢反復無常瞬息萬變的特點,建立跟蹤監測和競爭分析(Competitor analysis-CA)系統,是完善并跑戰略策略優化機制重要前提和組成部分。針對并跑階段霸權領跑者加劇政治打壓、經濟制裁、技術霸凌等特點,研究和形成分析、學習、對等措施和以牙還牙的路線和方法等師夷之長制夷的應對機制,尤其要以創新應萬變暨適時調整形成戰略轉型優化機制,以“官、民、產、學、研”協同創新系統與技術自主創新戰略策略相結合,綜合建立應對技術霸權的組合方案和多途徑反制的應對機制。并跑階段關鍵點跨越往往是通過龍頭企業的創新突破和技術能力來率先實現和揭示的,因此培育、保護和發展能夠有實力有能力參與國際技術霸權巨頭制衡的龍頭大企業,同時大力發展大批中小企業,形成大中小企業協同創新集群相生機制,綜合提升創新能量。新舉國體制是中國集中力量辦大事的優良傳統和制度優勢,是突破“卡脖子技術”和關鍵核心技術研發,實現并跑階段向領跑階段沖刺超車的中國特色機制。并跑階段戰略轉型下科研重點轉向原始創新。通過優化環境和政策創新育成全球一流教育、宜居、宜創新和魅力度的人才高地機制,集聚舉世英才加速新領域新賽道創新。突出原始創新與重大突破,更注重論文質量,同時在產業價值鏈高端奪取關鍵核心技術創新主導權,力爭專利池、專利家族、專利聯盟和國內專利、合作專利、IP5專利、國際專利優化組合全球布局,提高技術標準話語權,加速擴大標準必要專利占比,形成知識產權戰略創新生態的優勝機制,匯聚創新動能超越并跑向領跑躍遷的臨界質量。
概而言之,并跑階段系統內在必然聯系高度集中體現于技術創新系統與社會系統創新相生機制。技術創新是社會發展驅動力,社會發展尤其是社會技術系統是技術創新的土壤、戰場和保障。并跑階段創新動能數量質量要以超常加速匯聚突破臨界躍遷至領跑階段需要新科技革命先導技術指標大幅超越,同時需要世界一流的綜合國力和經濟基礎、符合人類共同命運的制度創新優勢、數字化智慧化社會5.0乃至更高即可持續發展的設施和環境載體,綜合形成科技和社會創新優勢生態位持續優化演進,才能突破臨界質量躍遷領跑。
第三,領跑階段機制。縱觀歷次科技革命中趕超躍出的領跑國,創新資源集聚和市場開拓,無不使槍動炮武力開道。技術霸權領跑者遵循叢林法則唯本國本地區本企業核心利益獨尊,所有技術規則表現為殖民國家對被殖民國家、發達國家對發展中國家的技術霸權機制,這種機制已盡顯衰弊不可持續。技術霸權領跑以資本逐利全球化為背景。當前,人工智能、大數據、云計算、物聯網等推動的數字全球化,既要求人類以數字化突破時空樊籬,又要求智能社會化分享數字福祉。美國學者Buccella(2022)[29]也主張人人享有人工智能才是社會正義。數字化智慧化發展新時代人類命運共同要求的新科技革命先導技術創新和諧普惠領跑新機制,正在崛起為未來發展主流。領跑階段不斷涌現顛覆性創新是克服在位陷阱保持領跑的階段機制,在和諧普惠新型領跑建設人類命運共同體中造福人類是長效機制。中國的機制從來不是超越美國而是超越自我成為更好造福人類的中國。
四、 新科技革命先導技術差距測度與實證分析
(一) 樣板選擇與數據說明
一是主體樣板選擇。根據新科技革命主體的先導性、主流性和競爭性的特征和地位,本文選擇中國(CN)、美國(US)、歐盟(EU)、日本(JP)和韓國(KR)(或稱中美歐日韓)作為主要比較研究對象。在新科技革命先導技術領域,中美歐日韓同處世界創新第一梯隊主導新科技革命,五大經濟體的相關專利和科研論文占全球80%以上,同時經濟體間亦為并跑或競爭領跑關系,作為知己知彼研究具有戰略意義。
二是技術樣板選擇。在新科技革命諸多先導技術中選擇人工智能、大數據、云計算、物聯網、3D打印、智能機器人(本文簡稱新科技革命先導技術)一組技術作為本研究數據基源,一是因其創新著創新工具、創新速度、創新優勢和創新范式,主導著傳統技術升級和未來技術發展;二是因其創新系統相生性,其任一單項技術不能獨立發揮作用而需互為條件交集相生協合發力,甚至衍生工業4.0、數字孿生和元宇宙,從而引領著新科技革命集成創新主流方向;三是因其是通往和掌握未來數字新世界的必由之路和先機高地,其先導關系普惠和諧引領人類命運共同體的建設。
三是樣板數據說明。綜合參照國際標準產業分類(SICRev.4)、國際專利分類(Guide to the IPC,2021)和經合組織(OECD)按照主要技術和國際專利分類(IPC)劃分的專利(2021年版),對上述六大技術分別進行細粒度技術分類和專利分類,形成新科技先導技術細粒度分類與主要專利代碼選擇,用以在中國知識產權局(CNIPA)、美國專利商標局(USPTO)、歐洲專利局(EPO)、日本特許廳(JPO)、韓國特許廳(KIPO)、知識產權組織(WIPO)官網和SCOPUS論文數據庫官網,檢索1984—2022年中美歐日韓樣板技術專利和論文作為技術差距測度基礎數據,實證的區間根據數據有無及可比性相應調整,各圖表數據來源同上不贅。
(二) 知識產權數據的數量與質量結構分析
第一,數量與結構分析。共檢獲1984年至2022年人工智能、物聯網、大數據、云計算、3D打印、機器人等六大領域研究文獻867814篇和技術專利734375件。
研究文獻總量首位是歐盟246915篇約占28.45%,其次是美國238661篇約占27.50%,第三是中國203664篇約占23.47%,而其中人工智能研究文獻中國最多,如圖5所示。技術專利申請數量首位是中國407340件約占世界的78.10%,其次是美國49156件約占世界的9.43%,第三是韓國26559件約占世界的5.10%。
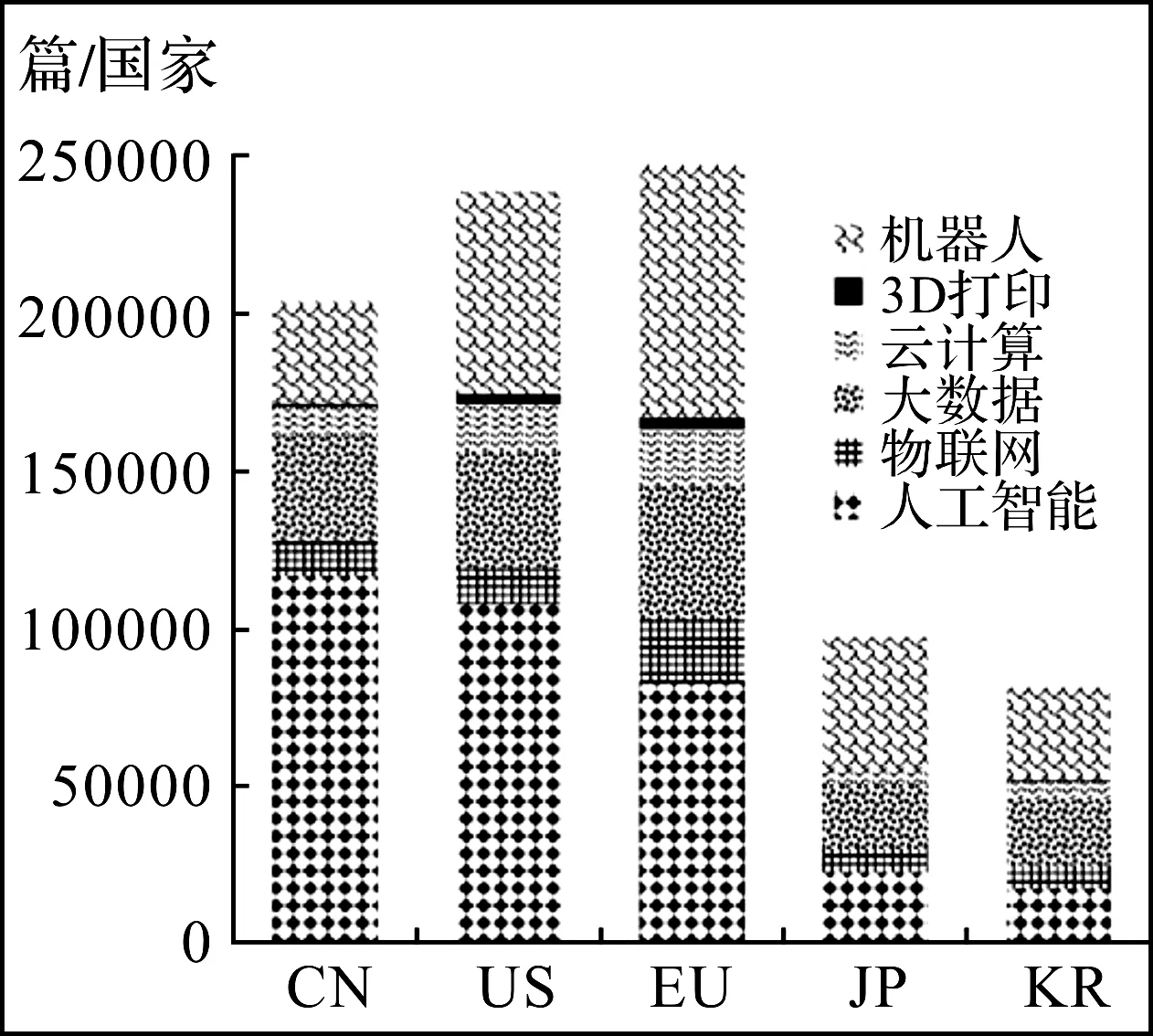
圖5 技術研究文獻結構與數量比較
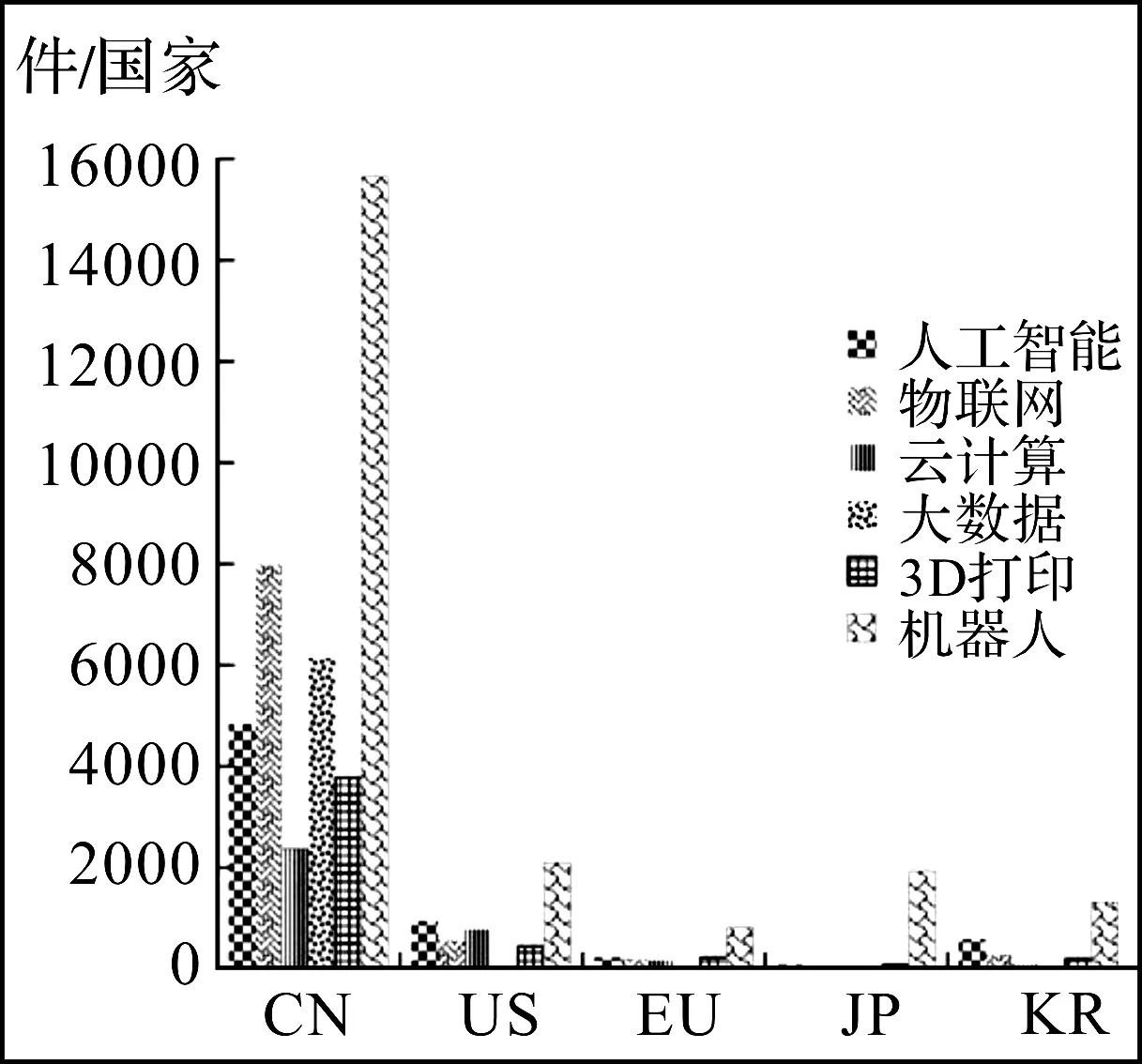
圖6 技術專利結構與申請數量比較
從研究文獻數量和技術專利數量總體結構看,中國在新科技革命先導知識創新方面的趕超較弱于技術創新方面的趕超,但從細分看其中也有強項,諸如中國在人工智能領域研究文獻和機器人專利代表的知識創新和技術創新實績就十分突出,綜合政策含義是要加強基礎理論研究和補齊技術創新短板,全面提高創新能級以加速達到躍遷領跑的臨界質量。
第二,質量與結構分析。研究文獻數據的質量性分析主要看被引程度,當今前沿而有效的做法是通過被引的數量進行文獻排序,進而重點分析被引數量前1/100位的文獻即所謂高被引文獻。2012年至2022年高被引文獻總量首位是中國4634篇,接下來是美國和歐盟。而從縱向維度動態看,前期中國文獻雖多但高被引文獻處于低位跟跑,2014年前后實現部分追趕進入并跑,接近2019年開始爆發式高速增長,至2022年呈陡勢直線躍遷于高位保持領先地位,具體如圖7和圖8所示,“三跑”進程有代表性地描述了中國創新質量進步的近年走勢。
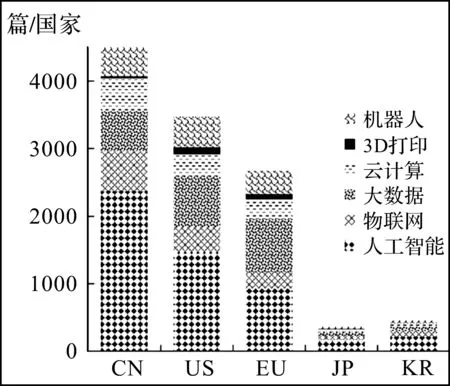
圖7 高被引文獻結構與比較

圖8 高被引文獻“三跑”動態
技術專利數據質量性分析主要看IP5數量、專利家族和國內外結構等。中美歐日韓知識產權五局即IP5是世界上最大的知識產權局,集中代表了全球80%以上專利和專利家族。專利家族是跨知識產權機構和地域保護同一發明的一組相同優先級專利文獻集合法權,比非家族專利更具有技術競爭力。國內外專利結構有多角度意義,通常條件下只有本國籍人在本局的國內專利或本國籍人的國外專利太少則缺乏國際化競爭力,本國籍人在本局的國內專利太少或本局外籍人的專利過多則表示缺乏本地自主創新主導力。
綜合分析發現,中國專利的基本格局是本國籍人在本局的國內專利占絕對多數而國外專利太少,意味著本地創新主導力較強而國際化競爭力相對不足。諸如表2所示的物聯網技術IP5專利,除中國之外其他經濟體國外申請專利與國內專利比大致各占50%上下,中國人申請國外專利470件,僅占中國人申請專利總數7496件的6.3%,僅占所有國的國外申請專利8694件的5.4%,而這項指標美國遠遠超過其他經濟體高達41.1%,表明其國際化競爭力強,尤其要強調指出的是在其他先導技術領域大致也都是物聯網技術這種結構格局,這就是中國專利總數最多,但還存在技術差距的原因之一,如圖6和圖10所示。

圖10 本國籍申請機器人專利動態
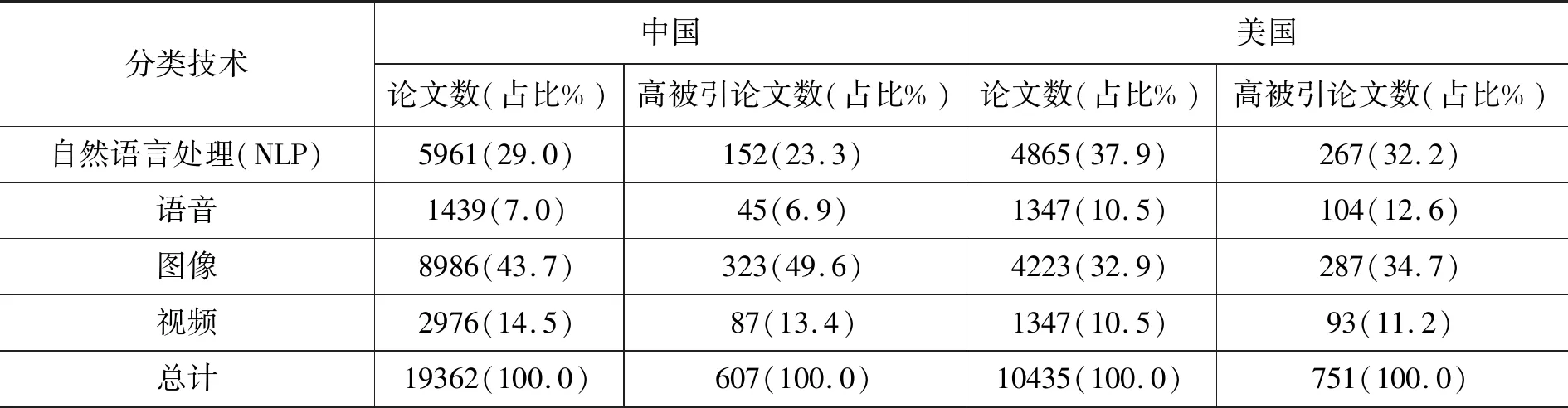
表3 生成式AI領域中分類技術中美研究論文數據比較(2018—2022)
專利競爭重在IP5家族專利,而IP5家族專利高度集中于新科技革命先導技術龍頭企業。這些企業既是人工智能的領跑者,又是物聯網、大數據、云計算的領跑者,代表著新科技革命先導技術融合趨勢,引領新科技革命先導技術前沿集成創新,提供數字時代數字基礎創新工具,諸如操作系統及開源軟件,掌控構建網絡空間命運共同體的核心技術和關鍵基礎資源,由此視角可以說新科技革命先導技術領跑前沿首當其沖是龍頭企業的競爭。據全球數據分析公司Statista統計[30],如圖9人工智能IP5家族專利世界前10位企業,中國有第一位騰訊、第二位百度、第五位平安保險、第九位華為,四家企業共占到中國人工智能IP5家族專利的65.9%[31],而從縱向維度看,中國企業一直在加速追趕,直到2020年騰訊和百度才在數量上趕上IBM、三星和微軟,全程呈現出典型、激烈而精彩的并跑階段競爭特征。但美國企業掌控操作系統、域名、軟件、核心技術和關鍵資源,市值和國際競爭力都不可同日而語。
上述各類數據和結構指標分析只能觀察某些角度和單一側面,為了全面比較分析、厘清差距、找出問題,本研究應用如下模型和指標體系進行綜合測度。
(三) 技術差距測度模型與指標體系
技術測度的模型采用周松蘭(2020)[32]的方法,利用科技論文和專利的活動力指數、影響力指數和專利市場力指數,計算中美歐日韓在人工智能、大數據、云計算、物聯網、3D打印和智能機器人等六大技術領域的技術水平,并進行比較。
1.論文活動力指數PpAI(Paper Activity Index)
其中,Tij為在i技術領域j國發表論文數;nt為全體評價對象數(下同)。
2.論文影響力指數PpCI(Paper Citation Index)
(2)
其中,CTij為在i技術領域j國發表論文被引用數;Tij為在i技術領域j國發表論文數。
3.專利活動力指數PtAI(Patent Activity Index)
(3)
其中,APij為在i技術領域j國申請專利數。
4.專利影響力指數PtCI(Patent Citation Index)
(4)
其中,CPij為在i技術領域j國登記專利被引用數;RPij為在i技術領域j國登記專利件數。
5.專利市場力指數PtMI(Patent Market-power Index)
(5)
其中,nijk為在i技術領域j國于其專利家族k個國家所申請的專利件數;k為專利家族數;APij為在i技術領域j國申請專利件數;lijk為在i技術領域j國于其專利家族k個國家所登記的專利件數;RPij為在i技術領域j國登記專利件數。綜合以上指數構建技術差距測度評分模型(6)。
(6)
以模型(6)計量得出數值參差雜亂不便于一目了然揭示比較結果,所以采取Nelson和Handler(2013)[33]在技術排名評分所用的Gordon評分模型(7),以模型(6)計量結果最高者為百分相對其他樣板進行百分比標化,并以10分為年單位比較技術差距。
利用模型(6)—(7),對中美歐日韓在人工智能、大數據、云計算、物聯網、3D打印和智能機器人等六大技術評分按時間線分列,最后形成新科技革命六大先導技術各領域的和新科技革命先導技術總體的技術差距曲線(見圖11、圖12)。

圖11 新科技革命六大先導技術差距跟蹤曲線圖組
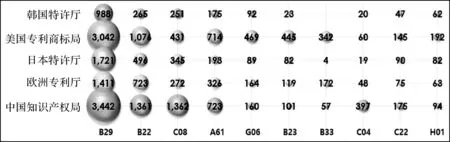
圖13 中美歐日韓3D打印專利申請數量與分類技術基礎優勢比較
(四) 新科技革命先導技術各領域與總技術差距跟蹤曲線的階段分析
1.跟跑階段分析。應用模型測度結果形成技術差距跟蹤曲線,具體以2014年為轉折點(見圖11、圖12中線),之前為新科技革命先導技術中國跟跑階段,而后中國進入與主要經濟體并跑階段。如果中國改革開放后新科技趕超以1978年全國科技大會為起點,至1984年,在人工智能領域,美國有研究論文14256篇和專利244件,歐盟有研究論文3618篇和專利125件,日本有研究論文1275篇和專利659件,韓國有研究論文77篇和專利27件,中國有研究論文80篇和專利4件,由之測度比較樣板數據評分美國最高(下同,略),中國最低,同時這種情形在其他5種技術領域亦大同小異,研究文章多為國外進展的評介,具有典型的跟跑階段特征。至2008年格局(見圖11和圖12,下同),6種技術領域綜合評價中國59.6分,歐盟87.8分,日本88.7分,韓國71.6分,如果10分差距為1年,在靜態切面來看中國大約落后美國4年;中國各技術領域,大數據較好66.3分,智能機器人較差52.7分。
2008年至2014年,從各技術領域及其綜合曲線看:歐美一直在高位平穩演進,日本在平穩中略顯頹勢,韓國總在波浪式向上趕超;而中國在波動震蕩中增長,但上升幅度小且水漲船高格局下技術水平始終低于歐美日韓,跟跑階段的特點十分明顯。
2.并跑階段分析。從1978年全國科技大會至2014年中國科學院第十七次院士大會暨中國工程院第十二次院士大會的歷史階段,中國在30多年創新能量積累基礎上,出臺和實施國家創新驅動發展戰略綱要、國家信息化發展戰略綱要等系列制度創新,引領科技由跟跑向并跑、領跑轉型,推動新科技革命技術創新階段性躍遷,大體上以2014年為轉折進入并跑階段。
在人工智能技術領域,中國2018年趕上日韓,2019年至2021年在與歐盟持平中上升。物聯網技術的趕超動態更加富有并跑階段特征,中國2018年超越韓國,2019年超越日本,但2019年和2020年又接連被韓國趕超,到2021年中國才與韓國持平。大數據技術競爭中國躍遷突出,2017年超越韓國,2018年超越日本,2019年趕上歐盟并至2021年保持世界第二位。在云計算技術領域,中國2016年超越韓國,2017年超越日本,并以微小差距與韓國形成平行線式上升,至2021年中國以90.2分與歐盟持平。在3D打印技術領域,相對其他領域中國差距較大,引人注目的是2016年至2019年中國一直以微小差距與韓國平行線式演繹并跑,2021年超越日本,但與歐美還有差距。在智能機器人技術領域,相對其他領域中國差距較大,一直沒能達到90分,2016年一度與韓國持平,2020年和2021年超越韓國,但與歐美日比較還有不小的差距。
從新科技革命先導技術綜合評分看,美國和歐盟仍保持較高水平,中國2017年超越韓國,2019年超越日本,目前排在第三位,但今后并跑動態發展還會有反復和諸多不確定性。
(五) 新科技革命先導技術六大領域競爭格局和優劣勢分析
1.人工智能技術。中國在人工智能領域長足發展,研究論文和申請專利總量居世界之首,技術水平由2014年的66.1至2021年的93.3,躍居世界第二,如圖11(1)所示,特別是在人臉和語音識別、視覺分析以及自然語言處理等領域已奠定優勢,專利集群諸如識別模式(G06K 9/00-G06K9/78)、圖像分析(G06T7/00-G06T7/24)、語音識別(G10L15/02-G10L15/28)、使用神經網絡模型(G06N3/02-G06N3/08)、自然語言數據技術(G06F17/20-G06F17/28)等居世界創新主流。應用方面中國有世界上最大的互聯網用戶群超過8.4億互聯網用戶的市場優勢和技術制度優勢。同時中國人工智能發展也存在人工智能理論與倫理研究、人工智能人才、人工智能生態等方面劣勢和挑戰。
在數字孿生、元宇宙集成創新火熱之上,美國企業最近又推出生成式AI新賽道,中國非首創但入道很快,中國發表相關研究論文19362篇居世界第一,美國10435篇居世界第二,而高被引論文美國751篇居世界第一,中國607篇居世界第二,其中圖像技術分類中國顯現優勢,其研究論文數和高被引論文數都遠超美國,但中國整體高被引論文數稍遜,進一步研發和應用拭目以待。
2.物聯網技術。中國在物聯網領域,研究論文和申請專利總量居世界之首,技術差距縮小很快,從2014年的66.9至2021年的93.2,躍居世界第三,見圖11(2),特別是在物聯網核心技術傳感領域、5G和NB-IoT低功耗廣域網標準方面奠定基礎優勢。中國在H04電通信技術、G01測量和G08信號裝置等專利申請量遠超歐美日韓,居世界之首(見表4)。有國際競爭力的技術標準和專利集成方面,中國龍頭企業NB-IoT標準必要專利實力表現突出(見表5)。

表4 物聯網領域中分類傳感技術主要專利IP5各局申請量比較(2000—2020)

表5 物聯網領域中分類NB-IoT低功耗廣域網技術標準專利前10位企業(2015—2022)

表6 大數據采集儲存處理、監控、安全等中分類技術申請專利數——中美比較(2000—2022)

表8 世界前10位3D打印企業在IP5各局授權專利(2014—2022)
3.大數據技術。中國在大數據技術領域,研究論文和申請專利總量居世界之首,技術差距縮小很快,從2014年的66.4至2021年的95.6,躍居世界第二,見圖11(3),特別是在智能配電大數據、大數據采集儲存處理、大數據監控識別、系統安全等領域奠定基礎優勢,并有廣大市場和行業應用場景優勢,而美國在先進算力、算法創新等關鍵核心領域持續處于領先地位。
4.云計算技術。中國在云計算技術領域,研究論文和申請專利總量居世界之首,技術差距縮小很快,從2014年的70.0至2021年的92.2,躍居世界第二,見圖11(4),特別是在云計算核心技術G06F(電數字數據處理)、H04L(數字信息傳輸)、G06Q(數據處理系統與方法)、G06N(基于特定計算模型計算機系統)、G06K(數據識別、處理)、H04W(無線通信網絡)等領域形成一定優勢。
華為云、阿里云、騰訊云、百度云等迅速成長,自立自強并走向世界市場,但實現超越真正成為領跑者還有距離,中國專利申請量最多但授權量遠低于美國,有待提高知識產權質量。
5.3D打印技術。中國3D打印技術從2014年的64.7至2021年的88.6,躍居世界第三,見圖11(5),技術進步較快,主要在B29(塑性物質加工)、B22(金屬粉末及其制品制造)、C08(化合物聚合加工)等傳統領域奠定基礎優勢,主要有塑料打印、內部結構散熱、立體成型、聚合物表面處理,而歐美領跑國家在設備數字處理、有機聚合物、成像壓縮、感光性樹脂和人體器官打印等方面領跑前沿。當今3D打印世界前10位企業多出自歐美,這些巨頭在中國申請專利較多,3D打印也是中國知識產權局外國人專利較多的領域,其搶占中國市場的戰略意圖十分明顯。
6.智能機器人技術。中國在智能機器人技術領域,2001年至2022年,CNIPA申請專利總量156767件,居世界之首,是USPTO 20772件的7.5倍之多,按申請人國籍計中國專利149856件居世界之首,是美國13412件的11倍之多,但中國的國外申請率只有3.20%,美國為67.90%,故中國的國際競爭力遜于美國。
在智能機器人技術中分類領域,從前位企業和大學的專利申請數量和所占該分類技術所有申請專利的比重分析來看,發那科在機械手、零件、移動、工作和產業用機器人等5個領域都占居領跑地位。所有分類前3名除了哈爾濱工業大學之外都是日本、美國、韓國企業,中國機器人研發代表性大學,包括哈爾濱工業大學、合肥工業大學、燕山大學、上海交通大學、北京航空航天大學等,表上有名但都靠后,如表9所示,從一定側面反映出中國智能機器人技術研發專利有數量優勢而缺乏質量優勢,所以高質量發展是躍遷領跑必由之路。
五、 結論與政策建議
(一) 結論
本文基于知識產權數據和技術差距測度指標,對中美歐日韓新科技革命先導技術差距進行測度和評分,并貫穿“三跑”趕超內在機制系統分析,得出如下結論。
第一,經過長期跟跑過程積累創新能量和創新躍遷條件,以2014年為轉折點,中國新科技革命先導技術跟跑“臨界”和并跑的特征凸顯,一是新科技革命先導技術總體水平已逐漸趕上日韓與歐美接近,二是遭遇技術霸權領跑者全方位的技術封鎖、政治打壓和經濟制裁,三是反復出現超越與反超越的并跑特征,標志著總體上進入與主要經濟體并跑階段。
第二,中國新科技革命先導技術六大領域創新結構不平衡。其一,中國的人工智能技術水平已超過日韓,與歐盟持平,是趕超速度最快也是最有望率先躍遷領跑的領域;其二,大數據、云計算和物聯網三個領域均超過日韓,但其中物聯網是中日韓競爭最激烈的領域,技術水平指標反復輪回凸顯并跑階段特點;其三,3D打印和智能機器人技術與歐美日差距較大是短板;其四,研究文獻與技術專利數量最多但質量不是最高,與國際比較顯示,中國技術創新較強、知識創新較弱,本土主導力較強、國際競爭力較弱。
第三,中國新科技革命先導技術龍頭企業已經進入世界第一陣營,在部分領域超過日韓,正在并跑中與歐美接近,并具有國內市場和制度優勢,但相比領跑巨頭短板不可忽視:一是知識產權質量的短板,諸如家族專利、國際專利(PCT)、中日韓歐美五局專利、歐美日三局專利和標準必要專利,總體來看遠不及美國,導致國際競爭不夠強力;二是數字時代創新基礎工具系統短板,美國巨頭掌控互聯網、計算機、手機的操作和根服務系統,國內企業正在拼搏,但國產化還有距離;三是引領世界集成創新前沿的短板,德國集成創新工業4.0各國跟跑,美國集成創新數字孿生、元宇宙和ChatGPT,中國百度隨后推出“文心一言”,中國龍頭企業成功引領世界前沿集成創新之時即是中國實現躍遷領跑之始。
(二) 政策建議
1.緊密跟蹤和科學監測以適時優化戰略策略。針對并跑階段五大經濟體技術動態指標反復換位拉鋸激烈競爭特征,專業研究機構及政府相關部門要對趕超和反趕超動態緊密跟蹤、科學監測,適時優化科技創新戰略和策略。20世紀80年代,日本已打破美國光刻機等技術“卡脖子”局面,成為半導體、計算機和電信等領域的領跑者,但對并跑反復性認識和監測不足,應對戰略和策略優化升級不及時,之后任由美國重新趕超,應從此類日本與技術霸權斗爭經驗教訓和現實做法中得到啟示。
2.超前思維和“三跑”全周期通盤戰略謀化。要未雨綢繆,盡量在跟跑階段就涉足“無人區”,在新領域謀劃新賽道,盡早培育新動能新優勢。在跟跑階段獲得溢出技術和配件供應的同時,預測和研究并跑階段“卡脖子”的應對,諸如采取模擬對手的“紅隊戰略”仿真多種可能以形成揚長避短的預案系列,針對于并跑階段面對的關鍵配件斷供等手段,制定多種應對戰略,培育優勢儲備實力,以備危機時刻執行出奇制勝。
3.將突破基礎工具系統卡脖子作為并跑決勝的戰略重點。新科技革命先導技術霸權領跑國家將數字基礎工具政治化和武器化。尤其掌握核心技術和數字基礎工具霸權的科技巨頭富可敵國且凌駕國家和國際道義之上,動輒操控用戶電腦黑屏乃至封禁國家總統網絡賬號或給某國斷網。當前中國數字基礎創新工具受制于人,形同達摩克利斯之劍懸頂。所以并跑決勝的重中之重,是盡速加強“信創”尤其是數字基礎工具系統硬件、軟件和核心技術自主可控,首當其沖的是操作系統和開源軟件系統的國產化替代,諸如政策扶持和全民支持加速鴻蒙、歐拉、統信UOS、優麒麟、深度Deepin和域名系統國產化自主可控,在并跑階段打破跟跑階段形成的工具系統依賴和阻滯躍遷領跑的潛在危機,奠定自主、安全、可控和基礎性的、普遍性的和長期性的數字工具系統創新生態。
4.加速技術創新結構和創新路線的優化。并跑階段創新結構以同賽道競爭、多賽道并軌和新賽道創出等諸多路線互補加快超車。創新路線以現有、近期和未來技術交替滾動式進行研發。秘密技術研發專業化創新路線和專利技術研發市場化創新路線互補。鼓勵發表有國內外頂級影響的高質量論文和注重多管道科學評價新發現、新觀點、新原理、新機制等標志性創新成果互補。龍頭企業研發、獨角獸企業研發與官產學研協同創新互補。另辟蹊徑開啟新技術窗口以顛覆性創新碾壓現有技術,諸如量子計算機市場化替代半導體計算機。“無人區”原始技術突破與突破性系統集成創新互補。代表著新科技革命先導技術集成創新最近三次浪潮,德國提出和領跑的工業4.0,美國提出和領跑的數字孿生、元宇宙和Chat GPD,都不是“無人區”單一技術突破,而是已有技術的系統集成創新,中國也應抓住新領域發展新賽道突破關鍵核心技術,實現數字時代的系統集成創新,躍遷為新型領跑者。
5.促進技術創新和社會創新相生相長。并跑階段戰略重點是提升技術創新的能量,這是勝出并跑,躍遷領跑的關鍵決定性因素。但要提升技術創新能量,必須與社會創新相生相長。原與技術跟跑相匹配的社會系統有諸多不適應甚至會阻礙并跑階段的技術創新。教育與培訓是歷次科技革命中后來者成功趕超的基礎條件。尤其當前發展正處于技術數字化的創新范式革命,消減數字鴻溝,建設數字中國,推動數字經濟和數字化社會轉型,從頂層設計、法律規范、文化自信、教育改革和社會系統方方面面系統優化配置,以新型舉國體制塑造發展新動能新優勢。
猜你喜歡
中國化妝品(2022年4期)2022-09-15 11:59:04
科技智囊(2022年4期)2022-04-28 19:00:58
科技智囊(2022年4期)2022-04-28 19:00:58
中國核電(2021年3期)2021-08-13 08:57:04
學苑創造·B版(2021年2期)2021-03-15 05:50:49
科學中國人(2018年8期)2018-07-23 02:26:34
少兒科學周刊·兒童版(2017年9期)2018-03-15 15:00:11
兒童故事畫報·發現號趣味百科(2017年4期)2017-06-30 12:41:53
兒童故事畫報·發現號趣味百科(2016年6期)2016-08-19 06:35:19
兒童故事畫報·發現號趣味百科(2015年10期)2016-01-20 00:47:36