基于頻域信息融合和稀疏貝葉斯學習的高分辨ISAR成像
2023-10-31 09:49:16景鑫磊蔣忠進
雷達科學與技術 2023年5期
景鑫磊,張 宇,蔣忠進
(東南大學毫米波國家重點實驗室,江蘇南京 210096)
0 引言
逆合成孔徑雷達(Inverse Synthetic Aperture Radar,ISAR)成像作為一種重要的偵測手段,可以全天候、全時段對非合作機動性目標進行成像[1-2]。但是,因為非合作目標的運動補償建模比較復雜,積累轉角和回波多普勒帶寬受限,傳統的ISAR 成像算法,如Range Doppler(RD)算法,其成像分辨率受到限制,因此研究超分辨ISAR 成像算法具有重要意義。
MUSIC 算法和ESPRIT 算法是兩種傳統的參數化ISAR 成像算法。但MUSIC 算法的分辨率不是很高,酉ESPRIT 算法是一種超分辨算法,但該算法只能在距離維或者方向維實現超分辨,無法在兩個維度同時實現超分辨成像[3]。
壓縮感知(Compressed Sensing,CS)理論適合于稀疏參數的高分辨重構[4],并且ISAR 圖像中的強散射點滿足稀疏分布特性,所以CS 在超分辨ISAR成像中得到越來越多的研究和應用。稀疏信號恢復的出發點是在L0范數最小化的基礎上進行參數重構,但這是一個NP 難問題,壓縮感知理論在一定條件下,可以將L0范數最小化約束放寬為L1范數最小化約束,于是涌現出BP 算法[5]、梯度下降算法[6]以及迭代ISTA算法[7]等參數重構算法,但是這些算法在感知矩陣列相關性強的時候性能會出現下降,影響ISAR 成像效果。文獻[8]采用光滑函數來近似L0范數并進行稀疏參數重構,但該算法中的正則參數需要人為手動設置,影響了算法的實用性。
文獻[9]提出了基于稀疏貝葉斯學習(Sparse Bayesian Learning,SBL)框架的ISAR 成像算法,取得了不錯的效果。相比于傳統的SMV 模型[10],MMV-SBL 模型避免了Kron 內積導致的感知矩陣尺寸過大問題,以及大尺寸逆矩陣計算問題[11]。文獻[12]提出一種BI-MSBL 算法,該算法利用冗余信息的融合去除徑向插值帶來的條紋,獲得更清晰的ISAR 圖像。文獻[13]則提出一種LS-SBL算法,利用目標自身的結構特征構建結構化先驗模型和參數化字典,對旋轉運動目標進行ISAR 成像,取得較為理想的成像效果。文獻[14]引入LSM(Laplace Scale Mixture)尺度混合先驗模型,并通過拉普拉斯估計(Laplace Approximation,LA)和變分貝葉斯(Variational Bayesian,VB)算法求解散射系數的后驗分布,以此得到更稀疏更精確的ISAR圖像。
為了在ISAR 成像中更好地壓制噪聲,消除條紋干擾,提高成像分辨率,本文提出一種基于雙向插值處理(Bidirectional Interpolation Process)和頻域信息融合(Information Fusion in Frequency Domain)的稀疏貝葉斯學習算法,簡稱BI-FF SBL 算法。該算法引入LSM 先驗來為回波信號構建MMV SBL 模型,并采用LA-VB 算法進行目標散射系數的重構。首先對回波信號分別進行徑向和橫向插值預處理,將預處理得到的兩份數據通過LAVB SBL 算法進行ISAR 成像;然后將得到的兩幅ISAR 圖像通過二維傅里葉變換進入頻域,并將兩個二維頻譜進行信息融合處理,以消除噪聲和條紋干擾的相關信息并保留目標結構信息;最后對融合處理后的頻譜進行二維傅里葉逆變換,得到最終的ISAR圖像。
1 信號模型
假設已對雷達回波信號作平動補償,則ISAR成像模型可視為轉臺模型,ISAR 成像的原理圖如圖1所示,其中雷達向目標發射線性頻率調制(LFM)脈沖。由于雷達到目標中心的距離遠遠大于目標的尺寸,因此雷達電磁波被視為以平面波的形式照射到目標上,并假定目標以恒定的角速度旋轉。
回波HRRP 數據是通過對接收信號進行徑向脈沖壓縮得到的,其理想點散射中心模型可以表示為
式中:s(θ,f)表示進行徑向傅里葉變換后的HRRP數據,θ表示發收信號的目標轉角,f表示脈沖發射頻率;w(y,x)表示目標散射系數;c表示電磁波速度;R0表示從雷達到目標中心的遠場距離。
對成像的角度和頻率,以及二維場景進行離散化處理。在以目標中心為原點的局部坐標系中,散射區域被離散為P行和Q列,得到
式中:fc為載波頻率;fn為第n個離散頻率,n=1,2,…,N;θm為第m個脈沖對應的目標轉角,m=1,2,…,M;w(yp,xq)代表坐標(yp,xq)處的散射系數,其中p=1,2,…,P,q=1,2,…,Q。
將上式經過一系列的推導和化簡,并添加環境噪聲U,可得到回波信號的矩陣表達式為
式中,S∈CM×N表示回波信號矩陣,W∈CP×Q表示散射系數矩陣,U∈CM×N表示復高斯白噪聲,Φc∈CM×P和Φr∈CQ×N分別表示方向維和距離維的部分傅里葉矩陣,可將其展開為
2 BI-FF SBL算法
本文提出一種基于雙向插值處理和頻域信息融合的稀疏貝葉斯學習算法,此處簡稱BI-FF SBL算法,并將其用于高分辨ISAR成像。
2.1 徑向插值預處理
2.2 橫向插值預處理

2.3 基于LA-VB算法的參數重構
在傳統的MMV-SBL算法中,回波信號的MMV模型可以表示為
式中,Y∈CM×Q,Φ∈CM×P,W∈CP×Q與N∈CM×Q分別表示回波信號矩陣、感知矩陣、散射系數矩陣和噪聲矩陣。

令矩陣Y的列與列之間統計獨立,則Y的似然函數可寫為



由完全貝葉斯推導得出的近似后驗概率分布的期望可以用來作為未知參數的后驗估計,因此超參數λp,q和β的MAP估計可通過推導得出:

2.4 頻域融合

(c)融合Z1與Z2而得到最終的頻率圖像Z:

(d)對頻率圖像Z作二維傅里葉逆變換得到最終的ISAR圖像?。
3 實驗結果與對比分析
為了驗證BI-FF SBL 算法的有效性,本文基于電磁仿真數據和實測數據完成了ISAR 成像實驗。在實驗中測試了4種不同的算法,包括R-D(Range-Doppler)算法、L1-BP算法、LA-VB算法以及本文提出的BI-FF SBL 算法,并將不同算法的ISAR 成像結果進行對比。
為了檢驗不同算法抑制噪聲的能力,在仿真數據和實測數據中加入復高斯噪聲,合成了信噪比分別為0,5和10 dB的實驗數據。
3.1 仿真數據實驗
在基于仿真數據的實驗中,ISAR 成像目標是A-10攻擊機,其CAD模型如圖2(a)和(b)所示。回波信號由高頻電磁仿真代碼生成,入射頻率為9.5~10.5 GHz,中心頻率為10.0 GHz,帶寬為1 GHz,共掃描128 個頻率點。入射俯仰角為94°,入射中心方位角為135°,方位角寬度為5.729 6°,共掃描128 個方位角點。得到的回波信號矩陣尺寸為128×128。徑向和橫向分辨率均為0.15 m,成像面積為19.2 m×19.2 m。
圖2 A-10攻擊機CAD模型圖
實驗采用前文所述的4種算法,每種算法均在0,5 和10 dB 三個信噪比下進行ISAR 成像,成像結果如圖3所示。
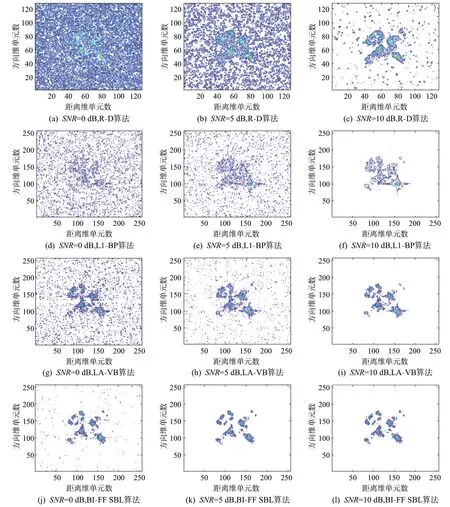
圖3 不同信噪比下各類算法的仿真ISAR成像效果圖
從圖3 可以看出,在信噪比為0 dB 時,由于噪聲的影響,傳統R-D 算法和L1-BP算法已經近乎失效;LA-VB 算法雖然可以粗略重構出飛機的幾何結構,但是ISAR 圖像受噪點影響嚴重,只能模糊地重構出機頭和機身處部分強散射點;本文的BIFF SBL 算法可以給出較為清晰的ISAR 圖像,雖然圖像中也分布有一些噪點,但仍然很好地保留了飛機的幾何結構特征。
在信噪比為5 dB 時,各類算法的成像效果均有所提升,但R-D算法所成ISAR圖像仍較為模糊,由L1-BP算法和LA-VB算法重構的ISAR圖像中存在較多噪點,而BI-FF SBL 算法則可以給出清晰的ISAR圖像。
在信噪比為10 dB 時,各類算法所成ISAR 圖像均能清晰地體現飛機的幾何結構特征。但是R-D算法所成圖像分辨率很低,圖中仍然存在較多噪點;L1-BP算法所成圖像分辨率低于LA-VB 算法和BI-FF SBL算法。
3.2 實測數據實驗
實測數據為ISAR 成像系統錄取的Yak-42 飛機回波信號,中心頻率為5.52 GHz,發射帶寬為400 MHz,脈沖重復頻率為400 Hz。實驗采用的回波信號矩陣的尺寸為128×128,通過添加復高斯白噪聲以獲取信噪比分別為0,5 和10 dB 的實驗數據。
實驗采用前文所述的4種算法,每種算法均在0,5 和10 dB 三個信噪比下進行ISAR 成像,成像結果如圖4所示。
如圖4所示,信噪比為0 dB 時,4 種算法的ISAR 成像結果中都存在不同程度的噪點,其中R-D 算法的成像效果最差;L1-BP 算法和LA-VB 算法所成圖像受噪點影響嚴重,導致機尾處部分結構特征缺失;本文的BI-FF SBL 算法所成圖像中雖然存在少量噪點,但依然能較好地體現飛機結構特征。
信噪比為5 dB 時,4 種算法的ISAR 成像效果都有所提高,L1-BP 算法和LA-VB 算法均好于R-D算法。BI-FF SBL 算法效果最好,圖像中只有少量噪點且飛機結構特征清晰。
在信噪比為10 dB 時,4 種算法都能給出清晰的ISAR 圖像,但3 種超分辨率算法的分辨率明顯高于R-D 算法。在L1-BP 算法和LA-VB 算法結果中,均存在較明顯的條紋干擾,而BI-FF SBL 算法則很好地去除了條紋干擾,在提高分辨率的同時很好地保留了飛機的幾何結構特征。
3.3 圖像重構誤差實驗
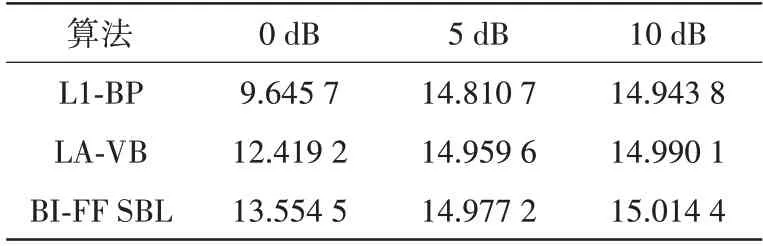
傳統ISAR 成像算法,如R-D 算法和MUSIC 算法等,其回波數據的尺寸和ISAR 成像的尺寸是一致的,即M=P,N=Q。在超分辨ISAR 成像中,ISAR成像的尺寸可以遠大于回波數據的尺寸,即M 本文采用重構信噪比(Reconstruction Signal to Noise Ratio,RSNR)作為指標,來評價超分辨ISAR成像算法的重構誤差,其定義如下: 在該實驗中,以A-10 攻擊機為ISAR 成像目標,通過高頻電磁仿真得到相關回波信號。然后向回波信號中添加高斯白噪聲,得到信噪比分別為0,5 和10 dB 的實驗數據。該實驗對比了BI-FF SBL 算法、L1-BP 算法和LA-VB 算法的RSNR,對比結果如表1所示。對于其中每一種算法,在獲取原尺寸圖像W時,M=N=256,P=Q=256;在獲取超分辨圖像?時,M=N=128,P=Q=256。 表1 不同超分辨ISAR成像算法的RSNR對比 由表1可知,3種超分辨ISAR 成像算法在實驗數據信噪比由5 dB降為0 dB時,RSNR 都有明顯的下降,其中L1-BP算法最為明顯,RSNR下降至10 dB以下。BI-FF SBL 算法在信噪比為10 dB 時,RSNR可以達到15.01 dB,且在信噪比下降至0 dB 時,RSNR 依舊可以保持在13 dB 以上。由此可見BIFF SBL算法的重構誤差明顯低于L1-BP算法和LAVB算法。 為了在ISAR 成像中更好地壓制噪聲,消除條紋干擾,提高成像分辨率,本文提出一種基于雙向插值處理和頻域信息融合的稀疏貝葉斯學習算法,即BI-FF SBL 算法。為了驗證BI-FF SBL 算法的效果,本文進行了基于仿真數據和實測數據的ISAR 成像實驗,并將實驗結果與其他3 種ISAR 成像算法進行對比,發現BI-FF SBL 算法在壓制噪聲和去除條紋干擾方面具有明顯的優勢,且能提供更高的ISAR 成像分辨率。重構誤差實驗結果表明,相比于其他兩種超分辨ISAR 成像算法,BI-FF SBL算法的重構誤差更低。 本文BI-FF SBL 算法的不足是需要更多的計算時間。跟利用EM 算法進行參數重構的傳統SBL 算法相比,LA-VB 算法在參數重構時,需要計算高斯一階絕對矩,其中包括多次計算庫默爾函數,導致運算量增加。本文的BI-FF SBL 算法為了增強壓制噪聲的能力,進行了兩次插值預處理,再基于LA-VB 算法進行兩次參數重構,導致計算時間增加。后續工作將探索計算復雜度更低的ISAR成像算法,在保留ISAR 成像效果的同時力求降低運算時間。
4 結束語
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
