大風浪條件下考慮避碰脆弱性的多船避碰決策
2023-10-31 20:08:53胡宴才張強吳恒濤
山東交通學院學報 2023年1期
胡宴才 張強 吳恒濤
摘要:為解決大風浪影響下船舶操縱能力降低、產生避碰脆弱性、碰撞事故發生概率增大的問題,考慮船舶長度,分析大風浪因素,獲得船舶避碰脆弱性;選取船舶碰撞危險度指標進行模糊推理得到基本的碰撞危險度,提出考慮船舶綜合碰撞危險度的多船避碰決策方法。利用多船會遇構建避碰決策模糊案例庫,提供對應的避碰決策,并利用仿真試驗驗證避碰決策方法的有效性。結果表明:多船避碰決策方法可準確計算不同長度船舶的避碰脆弱性,提供周圍船舶的綜合碰撞危險度,進行有效的多船避碰決策。此方法可為大風浪條件下的船舶航行安全提供重要的理論依據和數據參考。
關鍵詞:多船避碰;模糊推理;案例推理;避碰脆弱性;碰撞危險度
中圖分類號:U692.2文獻標志碼:A文章編號:1672-0032(2023)01-0093-09
引用格式:胡宴才,張強,吳恒濤.大風浪條件下考慮避碰脆弱性的多船避碰決策[J].山東交通學院學報,2023,31(1):93-101.
HU Yancai,ZHANG Qiang, WU Hengtao. Multi-vessels collision avoidance decisions considering the vulnerability of collision avoidance under heavy storm wave[J].Journal of Shandong Jiaotong University,2023,31(1):93-101.
0 引言
船舶避碰系統研究是提高船舶航行安全性的重要課題,對船舶進行避碰決策可為避碰行動提供依據。為減少人為避碰失誤,研究人員提出多種船舶碰撞危險度評估方法。碰撞危險度是描述航行船舶碰撞危險程度的重要參數,在船舶自動避碰系統中起承上啟下的作用,是船舶采取避碰決策的重要依據,研究碰撞危險度可推動智能船舶航行避碰決策水平的快速發展。
為構建準確可靠的碰撞危險度評估系統,Tu等[1]通過檢測侵犯他船船舶領域的可能性,將船舶領域評估船舶航行安全的標準結合最近會遇距離(distance to closest point of approach,DCPA)和到達最近會遇距離的時間(time to closest point of approach,TCPA)等危險指數,計算碰撞危險度。羅捷等[2]采用遺傳極限學習計算法計算船舶碰撞危險度,提高了船舶避碰的成功率。利用智能方法與傳統方法的差異性、互補性,將2類方法相結合進行避碰研究[3]。Zhou等[4]提出動態模糊船舶領域的概念,考慮本船和他船相關因素確定船舶航行碰撞危險度。但在評估碰撞危險度時,上述方法未充分考慮環境條件,如風、浪等外部因素的有效融合問題,影響碰撞危險度計算的準確性[5]。
Andrew等[6]構建了可分析已識別危險度因素的特定模型。Dang等[7]、Szlapczynski等[8]、Jo等[9]、Zhang等[10]針對海上航行時的惡劣天氣因素進行研究。考慮船舶的運動特性, 謝鴻偉等[11]針對開闊水域多船會遇情況,提出一種考慮船舶運動數學模型的自主避碰方法。針對避碰路徑規劃問題,賈立校等[12]提出綜合考慮速度和安全性的船舶智能避碰方法。周鳳杰[13]、曾勇等[14]采用粒子群-遺傳混合優化算法的船舶避碰決策方法,取得了較好的避碰決策和規劃效果。也有學者提出了碰撞危險度模糊評估、自主水面船舶實時避碰和不確定危險度回歸模型等方法,解決考慮避碰脆弱性的船舶避碰問題[15-16]。船舶碰撞危險度被視為宏觀的危險度,是指發生海上事故的可能性或海上事故的危險程度,而避碰脆弱性是指發生碰撞事故的可能性或發生碰撞事故的風險程度,避碰脆弱性增大意味著發生海上碰撞事故的可能性增大。
但考慮船員駕駛經驗案例,解決基于案例庫推理的大風浪因素影響的多船避碰問題的文獻較少。為提升船舶避碰決策的智能化和精確性,本文在大風浪下船舶避碰脆弱性評估的基礎上研究避碰決策,考慮避碰脆弱性,提出一種多船避碰模糊決策避碰方法。
1 大風浪條件下船舶碰撞危險度評估
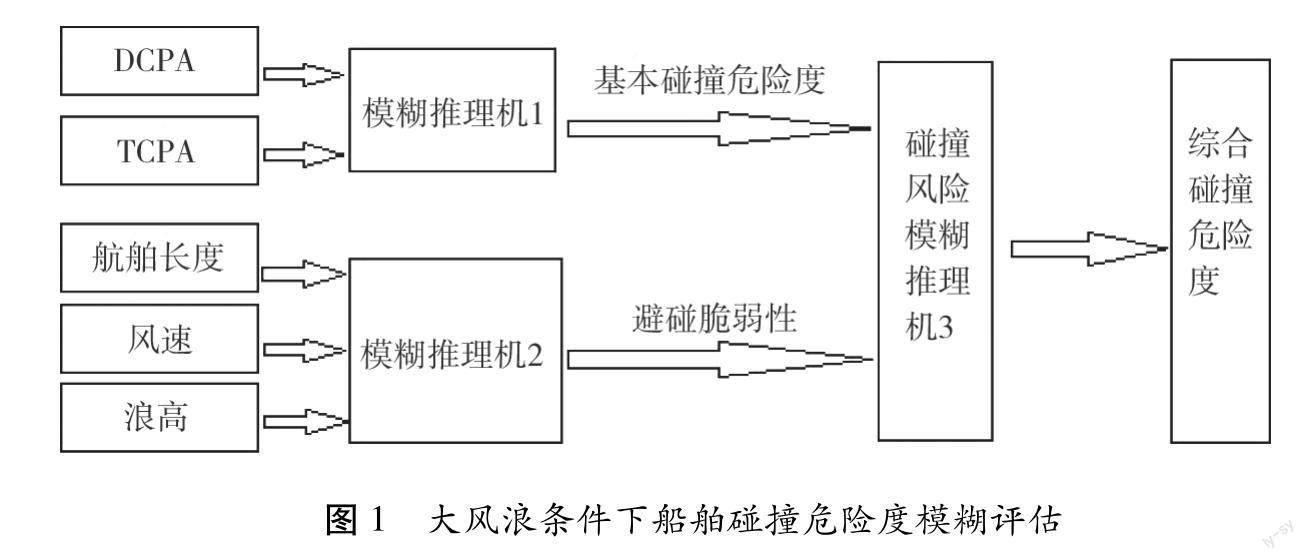
大風浪條件下易造成船舶碰撞危險度評估不當而錯過避碰時機,極易引發碰撞事故。采用考慮避碰脆弱性因素的船舶碰撞危險度模糊評估方法,結合基本的碰撞危險度和大風浪下不同類型船舶的避碰脆弱性,計算綜合碰撞危險度,如圖1所示。
1.1 船舶基本碰撞危險度
在船舶碰撞危險度評估方法中,最近會遇距離和到達最近會遇距離的時間是確定船舶是否存在碰撞危險的根本因素。最近會遇距離lDCPA通常考慮絕對值,本文將以lDCPA(-)或lDCPA(+)的形式區分本船左、右兩舷的船舶,繪圖顯示本船、目標船的位置關系,相對運動線朝向本船的方向,如圖2所示。
如果目標船相對運動或明顯向本船左側移動,則lDCPA為負;若目標船明顯向右運動,則lDCPA為正。根據目標船距離確定從本船到危險船舶的距離;目標船相對方位 (target relative bearing,TRB) 確定危險船舶的接近類型及根據案例庫的相似性進行調整,尋求適用的解決方案;lDCPA確定碰撞危險度模糊規則的輸入和生成,調整新航向的輸出;到達最近會遇距離的時間tTCPA確定危險區域內每艘船的碰撞危險度,并通過調整查詢到的來自案例庫中相似的解決方案,提供避碰決策。
基本碰撞危險度與避碰脆弱性概念不同,不能在數學上對二者簡單求和。本文采用模糊推理的方法將基本碰撞危險度和避碰脆弱性融合計算綜合碰撞危險度,采用改進的lDCPA和tTCPA方法提供更合理和適用的碰撞危險度評估。用于求解基本碰撞危險度模糊規則的輸入變量為lDCPA和tTCPA,輸出變量為基本安全指數Sindex和基本碰撞危險度Cr,形式為
(lDCPA,tTCPA)→ Sindex→Cr。
采用簡潔的模糊推理模型,將lDCPA、tTCPA和Sindex的隸屬度函數分別分為5、8、8個語言值。計算Cr時有2個輸入和1個輸出,可由推理規則確定。根據模糊邏輯推理規則,采用危險度指標lDCPA和tTCPA作為模糊推理輸入,得到Cr。模糊規則的輸出變量Sindex可用于求解Cr,計算公式為
lDCPA、tTCPA和Sindex的模糊隸屬度函數如圖3所示。
1.2 大風浪脆弱性危險度評估
評估小型船舶實際航行中大風浪因素影響碰撞危險度的程度,需考慮碰撞危險因素和避碰脆弱性因素。
采用模糊推理方法,通過模糊隸屬函數和推理規則,結合風速v和浪高h推算大風浪造成的避碰脆弱性Vw,推理關系為:
(v,h)→Vw。
根據Beaufort風浪標準[17]和專家們提出的意見,考慮船長度,確定大風浪條件下v和h等2個重要變量的隸屬度函數。以小型船舶為基準,設置v和h的3種語言值為小、中、大。根據專家和船長的問卷,為模糊引擎設計模糊規則,如表1所示。
采用三角隸屬度函數的模糊邏輯描述大風浪,大風浪脆弱性為0~1。如果脆弱性接近0,表明發生事故的可能性較小;脆弱性接近1,表明發生事故的可能性較大,如圖4所示。
船長采用非常小、小、中等、大、非常大5個語言值標示,如圖5a)所示。通常認定長約18 m的船為小型船舶,船長超過160 m為大型船。考慮到船長,采用模糊校正修改值調整Vw,如圖5b)所示。
2 船舶綜合碰撞危險度評估與避碰決策
采用具有模糊案例庫的避碰決策方案求解最佳的避碰航向,船舶避碰決策流程如圖6所示。在案例庫中存儲了經典決策案例。根據當前遇到的情況,從案例庫中檢索相似案例,獲得與經驗豐富的船員處置相似情況的避碰決策措施,再進行相似度調整獲得合適避碰方案。該避碰決策方法包含大風浪條件下避碰脆弱性危險度評估模塊(模塊1)、綜合危險度評估與新案例索引模塊(模塊2)和案例檢索決策模塊(模塊3)3個模塊。
在模塊1中評估脆弱性危險度指標和Cr指標,模塊2融合模塊1的2個評估結果,獲得綜合碰撞危險度,根據綜合碰撞危險度的模糊推理規則確定在大風浪影響下最危險的會遇船舶,如表2所示。
在模塊3避碰案例庫中檢索新案例的相似案例,根據案例會遇情況的相似度優化避碰決策,獲得合適的避碰方案。
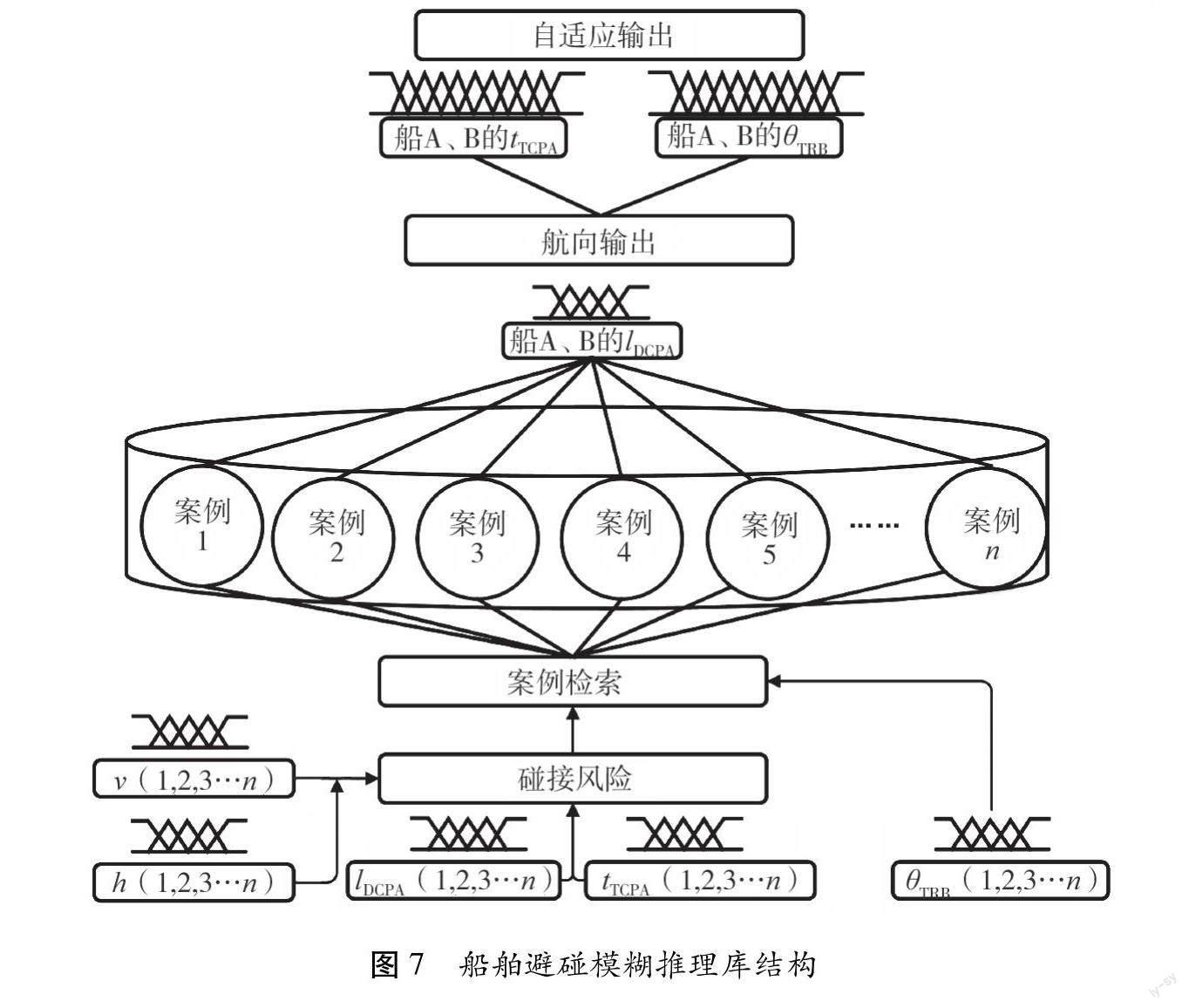
在避碰決策前進行案例檢索,船舶避碰模糊推理庫結構如圖7所示,A、B為目標船。根據tTCPA、目標船相對方位θTRB和lDCPA檢索避碰決策系統案例庫中的案例。當檢索到類似情況時,將lDCPA作為輸入參量,求解本船為避免碰撞采用的輸出航向Houtput。在考慮碰撞規則的基礎上,根據檢索的tTCPA、θTRB調整轉向,獲得輸出決策航向。
采用tTCPA和θTRB作為相似度調整的輸入參數,與案例庫中的案例參數比較,計算參數間的相似度,調整所選案例的解決方案,相似度
式中:ω為重要性加權,f為相似性函數,T、S分別為輸入參數和檢索案例參數,Ti、Si分別為第i個案例的輸入參數和檢索案例參數。
采用參數Ti與Si之差作為相似性模糊推理計算的輸入變量,即求解相似度的模糊規則的輸入、輸出變量為
(Ti-Si)→Sim。
由Houtput和案例相似度計算獲得決策航向Hnew,即
Houtput·Sim→Hnew。
3 仿真應用
為驗證模糊避碰決策方案的有效性,在仿真試驗中設置會遇情況,識別最危險的2艘船舶,并根據案例庫中存儲的案例進行推理和調整,采取安全的航向,避免與區域中的其他船舶相撞。
本船周圍10 n mile范圍內探測到6艘目標船,分別為A~F,如圖8所示,詳細信息如表3所示。采用模糊推理方法,以tTCPA、lDCPA和θTRB作為重要風險指數確定碰撞危險度。
風浪脆弱性條件(v,h)為V1(14 m/s,3 m)、V2(10 m/s,2 m)、V3(6 m/s,1.5 m)、V4(4 m/s,1 m)。船長分別為5、10、20、50、80、100、120、150、170、200 m的10種船舶在4種風浪脆弱性條件下的避碰脆弱性仿真結果如表4所示。
根據求解得到的碰撞危險度和相關參數,對目標船進行分類,結果如表5所示。在碰撞危險度相同時,先比較lDCPA,若lDCPA也相同,再比較tTCPA判斷船舶碰撞危險度的大小。
由表5可知:船舶F、E是最危險的目標。這2艘船的詳細信息將用于編制索引。根據案例庫檢索推理得到轉向避碰解決方案,轉向系統執行航向。通過調整新航向的避碰措施可獲得目標船lDCPA的變化。
在不考慮避碰脆弱性時,船F、A為最危險目標,船E、A的Cr相同,但船A的lDCPA更小;在考慮避碰脆弱性危險度后,船E長度較短,受風浪影響較大,避碰脆弱性危險度較大,綜合碰撞危險度比船A大,因此優先考慮船F、E。
自動避碰系統連續獲取周圍的目標船舶信息,如圖8所示,計算新的lDCPA、tTCPA和θTRB用作檢索案例庫的輸入,獲得解決方案后連續調整航向,直到獲得低碰撞危險度為止。對6艘目標船測試避碰方法,本船航向、目標船的綜合碰撞危險度、目標船的lDCPA和tTCPA、目標船與本船的距離的避碰仿真結果如圖9~13所示。
由圖9可知:根據本船當前會遇情況推薦避碰航向,將初始階段航向010°調整到030°,然后輸出航向095°,達到避讓危險目標船的效果,59 min后本船恢復初始航向。
由圖10可知:隨航向的調整,目標船的綜合碰撞危險度逐漸減小,目標船F的綜合碰撞危險度最先減小到安全范圍,所有船舶的碰撞危險度變負。
由圖11可知:在本船執行避碰航向后,lDCPA立刻增大,A船航向在相對運動線右側,其他船的航向在相對運動線左側。
由圖12、13可知:目標船的tTCPA逐漸減小,先遇到船B,后遇到船F。會遇后,tTCPA變負,絕對值增大。在案例庫中檢索到類似情況,采用新航向并應用在船舶會遇實例時,新lDCPA比原lDCPA明顯改善,驗證了算法的有效性。在避碰初期,系統輸出是本船變化較大的新航向角,避碰效果良好。與僅考慮基本碰撞危險度方法相比,本文采用的研究方法優先考慮了避碰脆弱性大的船E。經過避讓后,危險目標船的碰撞危險度逐漸減少,本船沿安全航線航行,避免與附近的目標船發生碰撞。最后,在確定沒有碰撞危險時,本船將恢復原定航向。
4 結語
針對多船會遇的船舶碰撞危險度綜合評估避碰決策問題,考慮大風浪的影響,提出了船舶避碰脆弱性的概念,提出一種考慮避碰脆弱性的模糊推理避碰方法,采用模糊推理校正測量風浪脆弱性對不同船長的影響。將船舶避碰脆弱性與基本碰撞危險度結合,得到綜合碰撞危險度,結合碰撞參數檢索模糊案例庫,尋找相似案例,制定避碰決策航向。仿真試驗結果驗證了考慮脆弱性避碰策略的有效性,提高了危險度評估和避碰決策的準確性。
未來可針對復雜環境借助模擬器進行試驗,完善案例庫提高獲得最佳決策輸出的效率。將數學船舶模型融入避碰系統,提升避碰系統的準確性,以便適應不同船舶的運動特性。
參考文獻:
[1]TU E, ZHANG G H, RACHMAWATI L, et al. Exploiting AIS data for intelligent maritime navigation:a comprehensive survey from data tomethodology[J].IEEE Transactions on Intelligent Transportation Systems, 2018,19(5):1559-1582.
[2]羅捷,王德嶺.遺傳極限學習計算法在船舶碰撞危險度確定中的應用[J].艦船科學技術,2021,43(9A):34-36.
LUO Jie, WANG Deling, Application of genetic limit learning algorithm in determination of ship collision risk[J].Ship Science and Technology, 2021,43(9A):34-36.
[3]李永杰,張瑞,魏慕恒,等.船舶自主航行關鍵技術研究現狀與展望[J].中國艦船研究,2021,16(1):32-44.
LI Yongjie, ZHANG Rui, WEI Muheng, et al. State-of-the-art research and prospects of key technologies for ship autonomous navigation[J].Chinese Journal of Ship Research, 2021,16(1):32-44.
[4]ZHOU Dan, ZHENG Zhongyi. Dynamic fuzzy ship domain considering the factors of own ship and other ships[J].The Journal of Navigation, 2019,72(2):467-482.
[5]HU Y C, ZHANG Q, PARK G K, et al. Automatic identification of ship navigation risk for collision accidents using uncertain regression model[C/OL]//2020 Chinese Automation Congress (CAC) proceedings, November 06-08,2020,Shanghai.[S.l.]:IEEE,2020 Chinese Automation Congress (CAC):3111-3116[2022-01-30].https://ieeexplore.ieee.org/document/9326693.
[6]ANDREW J, JOHNSON O U. Collision riskmodelling of supply vessels and offshore platforms under uncertainty[J].The Journal of Navigation, 2017,70(4):870-886.
[7]DANG X K, LE A H, HO V D, et al. Analyzing the sea weather effects to the ship maneuvering in Vietnam′s sea fromBinhThuan province to Ca Mau province based on fuzzy control method[J].Telecommunication Computing Electronics and Control, 2018,16(2):533-543.
[8]SZLAPCZYNSKI R, KRATA P. Determining and visualizing safe motion parameters of a ship navigating in severe weather conditions[J].Ocean Engineering, 2018,158(1):263-274.
[9]JO G J, HU Y C, PARK G K. Building of an algorithm to generate ship′s collision risk based on accident vulnerability under bad weather using fuzzylogic[J].Journal of Korean Institute of Intelligent Systems, 2018,28(4):369-374.
[10]ZHANG Qiang, ZHANG Meijuan, HU Yancai, et al. Error-driven-based adaptive nonlinear feedback control of course-keeping for ships[J].Journal of Marine Science and Technology, 2020,26(5):201-212.
[11]謝鴻偉,張英俊,邢勝偉.基于模型預測控制的船舶自主避碰方法[J].船舶工程, 2021, 43(8): 23-28.
XIE Hongwei, ZHANG Yingjun, XING Shengwei. A method for ship autonomous collision avoidance based on model predictive control[J].Ship Engineering, 2021,43(8):23-28.
[12]賈立校,王建濤.綜合考慮速度和安全的船舶智能避碰研究[J].艦船科學技術, 2021, 43(5A): 22-24.
JIA Lixiao, WANG Jiantao. Research on ship intelligent collision avoidance considering speed and safety[J].Ship Science and Technology, 2021,43(5A):22-24.
[13]周鳳杰.船舶避碰的粒子群-遺傳(PSO-GA)的混合優化算法研究[J].船舶力學, 2021, 25(7): 909-916.
ZHOU Fengjie. Research on hybrid optimization algorithm of particle swarm-genetic (PSO-GA) for ship collision avoidance[J].Journal of Ship Mechanics, 2021,25(7):909-916.
[14]曾勇,張金奮,張明陽.基于粒子群-遺傳優化算法的船舶避碰決策[J].中國航海, 2020, 43(1): 1-6.
ZENG Yong, ZHANG Jinfen, ZHANG Mingyang. Collision avoidance decision-making based on particle swarm optimization and genetic algorithm[J].Navigation of China, 2020,43(1):1-6.
[15]HU Y C, PARK G K, HONG T. Collision risk assessment based on the vulnerability of marine accidents using fuzzy logic[J].International Journal of Naval Architecture and Ocean Engineering, 2020,12(1):541-551.
[16]HU Y C, MENG X F, ZHANG Q, et al. A real-time collision avoidance system for autonomous surface vessel using fuzzy logic[J].IEEE Access, 2020,8(1):835-846.
[17] 麻辣GIS.關于蒲福風力等級表[EB/OL].(2013-11-09)[2022-01-28].https://malagis.com/about-beaufort-scale-table-2.html.
Multi-vessels collision avoidance decisions considering the vulnerability
of collision avoidance under heavy storm wave
HU Yancai, ZHANG Qiang, WU Hengtao
Shipping College,Shandong Jiaotong University,Weihai 264209,China
Abstract:In order to solve the problem that the ship′s maneuvering ability is reduced, and the collision avoidance vulnerability is generated and the collision accident probability is increased under the influence of heavy storm waves, the ship′s collision avoidance vulnerability is obtained by analyzing the factors of heavy storm waves and the ship′s length. The basic collision risk is obtained by fuzzy reasoning and a multi-ship collision avoidance decision method considering the comprehensive collision risk is proposed. The fuzzy case base of collision avoidance decision is constructed by using multi-ship collision, the corresponding collision avoidance decision is provided, and the effectiveness of the collision avoidance decision method is verified by simulation experiments. The results show that the multi-ship collision avoidance decision-making method can accurately calculate the collision avoidance vulnerability of ships of different lengths, provide the comprehensive collision risk of surrounding ships, and make effective multi-ship collision avoidance decision. This method can provide important theoretical basis and data reference for ship navigation safety under heavy storm wave conditions.
Keywords:multi-vessels collision avoidance; fuzzy reasoning; case-based reasoning; collision prevention vulnerability;risk of collision
(責任編輯:王惠)