雙異步電機驅動雙質體振動系統同步滑模控制
2023-11-10 06:32:56余樂侯勇俊趙永強汪玉琪
工程設計學報 2023年5期
余樂, 侯勇俊, 趙永強, 汪玉琪
(1.陜西理工大學 工程訓練中心, 陜西 漢中 723001; 2.西南石油大學 機電工程學院, 四川 成都 610500)
在煤炭、化工、建筑和糧食等領域,振動機械常被用于輸送、篩分、干燥物料[1]。其中,自同步振動篩因結構簡單、維護方便而被廣泛應用[2-3]。自同步是指2個或多個偏心轉子無需剛性連接即可實現同轉速運轉,即轉子間的相位差保持恒定。因此,在利用同步現象之前必須解決2個問題:一個是振動系統能否實現同步運動,另一個是在同步運動過程中的相位差是否滿足要求。這2個問題將直接影響振動系統的響應。
自同步現象最早由Huygens于1665年發現[4],他觀察到2個懸掛在薄板上的鐘擺在搖動一段時間后可以同步擺動。進入20世紀后,Blekhman等[5-6]對2個偏心轉子的同步運動進行了研究,并提出了自同步理論;聞邦椿等[2-3]分析了振動機械的自同步特性,并將相關理論應用到工程實踐中。近年來,Zhang等[7-9]采用改進的小參數方法分別對由2個和多個激振電機驅動的振動系統進行了理論和實驗研究;Djanan等[10-11]研究了一種激振電機在平板上運動的振動系統的同步運動;賀斌等[12-13]對一種2個激振電機安裝在同一個質體上的雙質體振動系統進行了研究。與此同時,學者們紛紛開展了多電機驅動振動系統的控制同步研究。Kong等[14-15]研究了由多個激振電機驅動的振動系統的控制同步運動及其索末菲(Sommerfeld)效應。Fang等[16-18]提出了轉子耦合擺振動系統,并對其自同步運動和控制同步運動進行了深入的研究。黃志龍等[19-20]在考慮物料影響的情況下,采用相鄰交叉耦合控制策略對多種多電機驅動的振動系統進行了控制同步研究。張康等[21-22]采用不同的滑模控制策略對多個直線電機進行了同步控制并開展了實驗研究。
然而,上述文獻的研究對象主要是激振電機安裝在同一質體上的振動系統,而較少涉及激振電機安裝在不同質體上的振動系統。為了減小地基載荷、占地面積以及實現對物料的多級篩分,侯勇俊等[23]提出了一種激振電機(異步電機)安裝在不同質體上的雙質體振動系統,并對其同步性展開了研究。結果表明:一些結構參數對振動系統的同步相位差有顯著影響,在部分參數條件下振動系統甚至不能實現自同步運轉,這均會影響振動系統的穩態響應和工作效率。
通常當同步相位差為0或π時,雙質體振動系統的激振力可以最大程度地疊加或者抵消,故0或π相位同步通常為工程應用所需的工作狀態。為了進一步提升振動系統的工作性能,筆者擬采用主從控制結構和滑模控制算法對異步電機進行矢量控制,以實現0或π相位同步。當振動系統的固有頻率與激振頻率相近時,其振幅會快速變化。利用這一特性,在工程應用中只需更換不同剛度的彈簧而不改變其他條件即可改變質體的振幅。因此,本文主要討論彈簧剛度對振動系統同步運動的影響以及所設計控制器對彈簧剛度不同的振動系統的同步控制效果。
1 雙質體振動系統的動力學模型
雙質體振動系統主要由上質體、下質體、激振電機(異步電機)、彈簧和底座等組成,其動力學模型如圖1所示。其中:彈簧是對稱放置的;2個異步電機上所帶的偏心塊用2個偏心轉子表示。當振動系統工作時,2個安裝在不同質體上的異步電機產生的激振力通過中間彈簧相互傳遞。這樣既可以減小每個質體的載荷,又能使2個質體以不同的軌跡運動。在動力學建模時,先推導振動系統的動能、勢能和能量耗散函數,再代入拉格朗日方程以推導振動系統的運動微分方程。
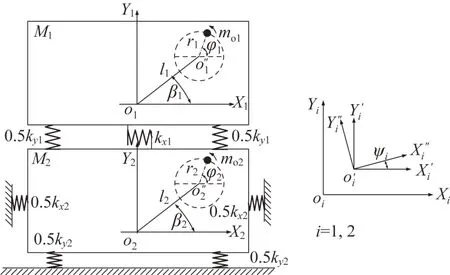
圖1 雙質體振動系統的動力學模型Fig.1 Dynamics model of double-mass vibration system
圖1中:o1-X1Y1和o2-X2Y2分別為上振動體(上質體和異步電機1的裝配體)和下振動體(下質體和異步電機2的裝配體)的絕對坐標系;o′1-X′1Y′1和o′2-X′2Y′2分別為平行于o1-X1Y1和o2-X2Y2的相對坐標系;o′1-X″1Y″1和o′2-X″2Y″2分別為相對于o′1-X′1Y′1和o′2-X′2Y′2的旋轉坐標系;o′1和o′2分別為上、下振動體的質心,靜止時o′i與oi(i=1, 2)重合;o″i(i=1, 2)為偏心轉子i的旋轉中心;li為原點oi與o″i之間的距離;φi為偏心轉子i的角位移;βi為連線oio″i與Xi軸之間的夾角;ri為偏心轉子i的等效半徑。令Φ″1、Φ″2分別表示偏心轉子1,2的質心在坐標系o′1-X″1Y″1和o′2-X″2Y″2中的坐標,Φ1、Φ2分別表示偏心轉子1,2的質心在坐標系o1-X1Y1和o2-X2Y2中的坐標,則根據圖1,可得:
其中:
式中:Φ′1、Φ′2分別為上、下振動體質心的位移向量;xi、yi分別為振動體質心沿Xi、Yi方向的位移;ψi為振動體質心旋轉的角位移。
由此可得,振動系統的動能T為:
式中:M1、M2分別為上、下振動體的質量;moi為偏心轉子i的質量;Jz1、Jz2分別為上、下振動體的轉動慣量;Joi為異步電機i的轉軸的轉動慣量。
振動系統的勢能E為:
式中:kxi、kyi、kψi分別為沿Xi、Yi和質心旋轉方向的彈簧剛度,其中kxi=kyi/3。
振動系統的能量耗散函數D為:
式中:fxi、fyi、fψi分別為沿Xi、Yi和質心旋轉方向的彈簧阻尼,其中fxi=0.001kxi,fyi=0.001kyi;fi為異步電機i的轉軸的阻尼。
則振動系統的廣義力Q可表示為:
式中:Te1、Te2分別為異步電機1,2的電磁轉矩。
拉格朗日方程可表示為:
其中:
式中:q為振動系統的廣義坐標。
將式(3)至式(6)代入式(7),即可得振動系統的運動微分方程:
其中:
式中:TL1、TL2分別為異步電機1,2的負載轉矩。
2 雙質體振動系統的固有頻率
對式(8)的前2個方程進行Laplace變換,可得:
式中:S為Laplace算子;(S)為xi的Laplace變換;(S)為moiri(sinφi+cosφi)的Laplace變換。
將式(9)整理成矩陣形式:
特征方程X(S)的行列式可以表示成如下形式:
令|X(S)|=0以求解S,其解可表示為:
式中:a1、a2為衰減系數;ωxr1、ωxr2為振動系統X方向的固有頻率。
同理,可得振動系統Y方向的固有頻率ωyr1和ωyr2。由于在實際工程應用中通常要求振動體上每個點的軌跡相同,因此異步電機的旋轉中心與振動體的質心重合(即l1=l2=0m),不考慮質心旋轉方向的振動。
本文雙質體振動系統選用2個相同的異步電機,振動系統和異步電機的參數分別如表1和表2所示。根據表2中異步電機的參數,可得其角頻率(即激振頻率)為157 rad/s。將表1中振動系統的參數代入式(12),可計算得到當ky1=1 062 kN/m時,振動系統X方向的固有頻率與激振頻率相同;當ky1=443 kN/m時,振動系統Y方向的固有頻率與激振頻率相同。
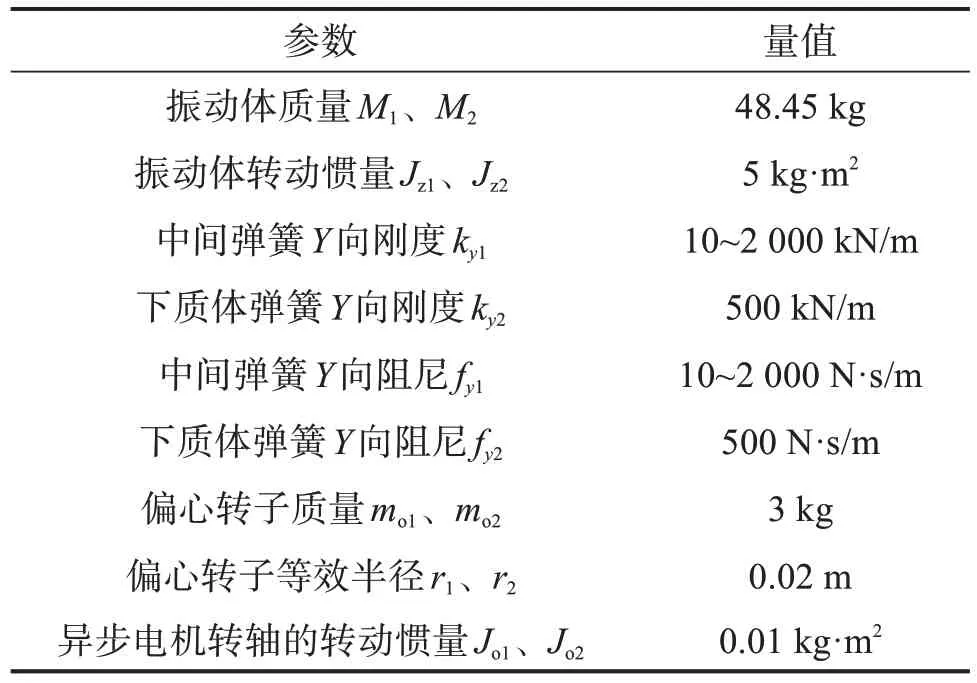
表1 雙質體振動系統的參數Table 1 Parameters of double-mass vibration system
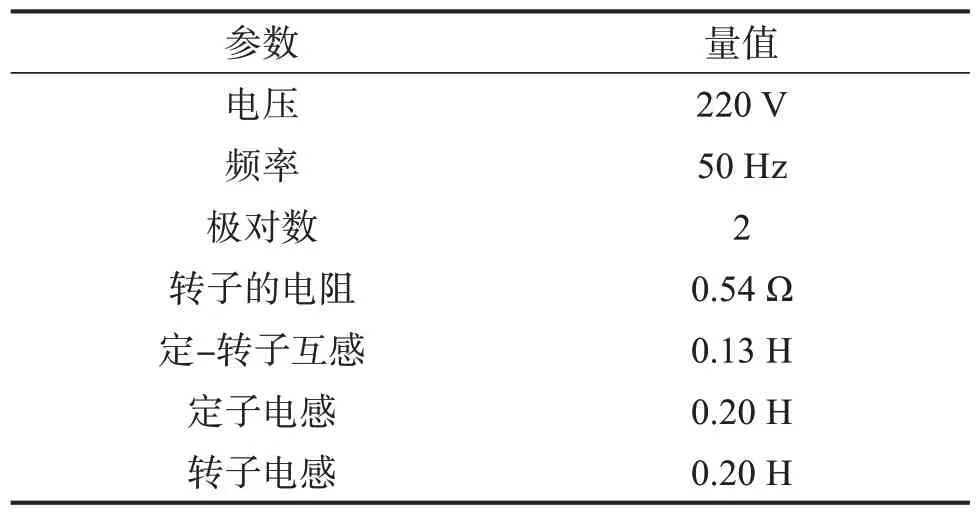
表2 異步電機的參數Table 2 Parameters of asynchronous motor
3 雙質體振動系統的控制器設計
交流異步電機的數學模型為非線性高階系統,其在d-q坐標系下的電壓、磁鏈方程[24]如下:
式中:Rs、Rr分別為定子、轉子的電阻;Lm、Ls、Lr分別為定-轉子互感、定子電感和轉子電感;ωT、ωs分別為定子的同步轉速和轉差轉速;U、I、?分別為電壓、電流、磁鏈;p為微分算子,p=d/dt。
在同步旋轉M-T坐標系中,有:
式中:np為極對數;?r為轉子總磁鏈。
根據式(15),將式(8)的后2個公式改寫成如下形式:
其中:
式中:ui(i=1, 2)為所設計的控制器。
本文通過對2個異步電機進行矢量控制來實現其同步運轉。異步電機的矢量控制原理如圖2所示。參照文獻[16-18],采用主從控制結構和滑模控制算法分別設計2個異步電機的控制器:對于電機1,只控制其轉速;對于電機2,只控制其與電機1之間的相位差。由此可實現2個異步電機的0或π相位差同步運轉。
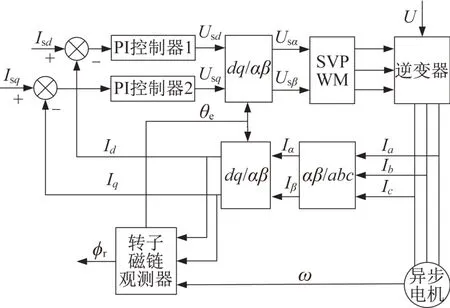
圖2 異步電機的矢量控制原理Fig.2 Vector control principle for asynchronous motor
3.1 主電機轉速控制
設異步電機1(主電機)的目標轉速為ωd,實際轉速為ω1;異步電機2(從電機)的實際轉速為ω2,則轉速跟蹤誤差e1為:
對式(17)求導,并將式(16)中的第1個方程代入,則可得:
設計滑模函數s1:
式中:c1為正實數。
對s1求關于時間的導數,并結合式(18)可得[16-18]:
假設s?1=0并忽略擾動TL1,則異步電機1的等效控制器ue1可表示為:
為了增強振動系統的穩定性,設計魯棒控制器uh1:
其中:
式中:ε1為大于零的常數。
根據式(21)和式(22),異步電機1的轉速滑模控制器u1為:
將式(23)代入式(20),整理可得:
定義Lyapunov函數V1為:
由式(25)可知,當V1=0時,s1=0;當V1>0時,s1≠0。對式(25)求導,可得:
由式(26)可知,當ε1>|TL1|/(Jo1+mo1r12)時,≤0,則有
根據式(19),可得:
3.2 從電機相位控制
異步電機1和異步電機2之間相位差的追蹤誤差e2可表示為:
式中:Δφ為2個異步電機的相位差,Δφ=φ1-φ2;Δφd為目標相位差。
結合式(16)和追蹤誤差e2的二階導數,可得:
設計滑模函數s2[16-18]:
式中:c2為正實數。
同理,為了增強振動系統的穩定性,設計魯棒控制器uh2[25]:
其中:
根據式(31)和式(32),異步電機2的相位差滑模控制器u2為:
將式(33)代入式(30),整理可得:
定義Lyapunov函數V2為:
由式(35)可知,當V2=0時,s2=0;當V2>0時,s2≠0。對式(35)求導,可得:
4 雙質體振動系統同步仿真分析
根據雙質體振動系統的運動微分方程、所設計的控制器以及電源-電機模塊,在MATLAB/Simulink環境中建立振動系統的機電-控制仿真模型。為了檢驗所設計控制器的可行性和魯棒性,首先,討論在自同步狀態(即控制器不介入)下彈簧剛度對振動系統同步特性的影響;然后,對自同步狀態下不能同步以及同步相位差不能實現0或π的工況進行控制同步仿真;最后,對比自同步仿真與控制同步仿真的結果。雙質體振動系統和異步電機的參數設置參見表1和表2。
4.1 自同步仿真分析
圖3所示為自同步狀態下彈簧剛度不同時雙質體振動系統的相位差隨時間的變化曲線,圖中曲線最終收斂說明振動系統實現了自同步運動。從圖3中可以看出,該振動系統的運動呈現3種狀態:1)相位差Δφ=0.91rad時的同向同步運動狀態;2)相位差為- 3.12≤Δφ≤- 2.35rad時的反向同步運動狀態;3)相位差發散時的不同步運動狀態。隨著彈簧剛度ky1的增大,相位差曲線經歷了收斂—發散—收斂—發散—收斂的過程。當ky1=443 kN/m時,相位差曲線發散,根據式(12),此時Y方向的固有頻率與激振頻率相同,均為157 rad/s;當ky1=900 kN/m時,相位差曲線也發散,此時X方向的固有頻率為146.3 rad/s,略小于激振頻率157 rad/s;當ky1=1 062 kN/m,相位差曲線收斂,此時X方向的固有頻率與激振頻率相同。結果表明,當X方向共振時,雙質體振動系統可以實現同步運動,此時其相位差Δφ=- 2.90rad。
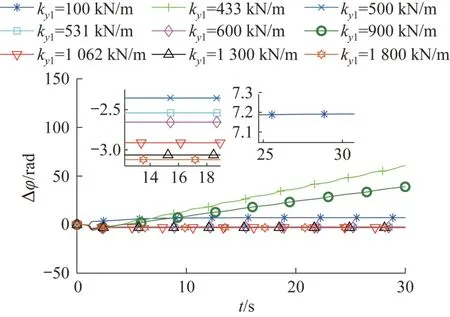
圖3 不同彈簧剛度下雙質體振動系統的相位差仿真結果Fig.3 Phase difference simulation results of double-mass vibration system under different spring stiffness
通過仿真得到ky1=443 kN/m和ky1=1 062 kN/m時雙質體振動系統的響應和異步電機的轉速,結果分別如圖4和圖5所示。由圖可知,當ky1=443 kN/m時,異步電機不能以恒定的轉速運轉,其轉速在149.4~158.1rad/s內波動;振動系統各個方向的振幅均不恒定,即無恒定的運動軌跡。當ky1=1 062 kN/m時,異步電機的轉速在151.4~152.4rad/s內波動,可以看作以恒定的轉速運轉;振動系統各個方向的振幅恒定,即運動軌跡恒定。
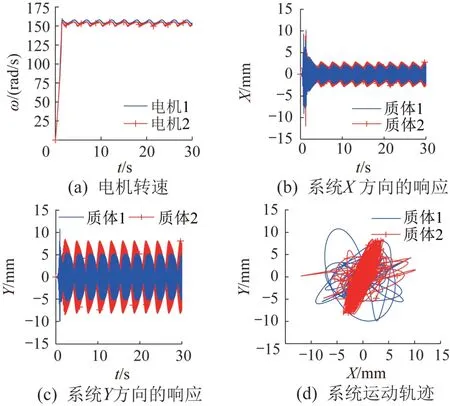
圖4 ky1=443 kN/m時雙質體振動系統的自同步仿真結果Fig.4 Self-synchronization simulation results of doublemass vibration system with ky1=443 kN/m
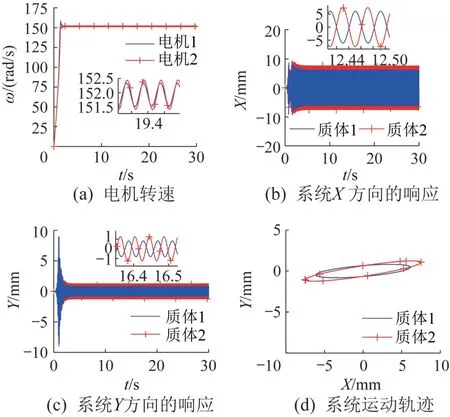
圖5 ky1=1 062 kN/m時雙質體振動系統的自同步仿真結果Fig.5 Self-synchronization simulation results of double-mass vibration system with ky1=1 062 kN/m
4.2 控制同步仿真
分別采用圖4和圖5對應的參數對雙質體振動系統的異步電機進行滑模矢量控制,得到ky1=443 kN/m和ky1=1 062 kN/m時振動系統的控制同步仿真結果,分別如圖6和圖7所示。其中:主電機的目標轉速ωd=157rad/s;主從電機間的初始目標相位差Δφd=0,t=15 s時目標相位差Δφd=π。由圖6和圖7可知,相位差曲線最終趨于收斂,雙質體振動系統各個方向的振幅恒定,說明其處于穩定的同步運轉狀態。根據圖6(a)、(b)和圖7(a)、(b),可知所設計的控制器的跟蹤效果良好。
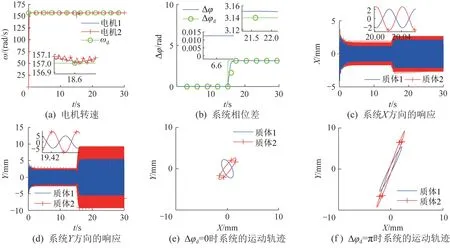
圖6 ky1=443 kN/m時雙質體振動系統的控制同步仿真結果Fig.6 Control synchronization simulation results of double-mass vibration system with ky1=443 kN/m
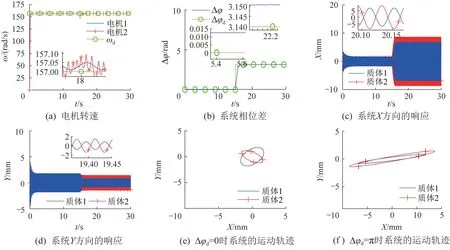
圖7 ky1=1 062 kN/m時雙質體振動系統的控制同步仿真結果Fig.7 Control synchronization simulation results of double-mass vibration system with ky1=1 062 kN/m
對比圖4和圖6可知,通過對異步電機進行滑模矢量控制可使原本不能同步運轉的雙質體振動系統同步運轉且可以調節相位差。對比圖6(e)和圖6(f)所示的振動系統的穩定運動軌跡可知,當目標相位差為π時振動系統的Y方向響應顯著增大,上、下質體的運動軌跡均為與水平方向夾角大約為60°的橢圓軌跡。
對比圖5和圖7可知,通過對異步電機進行滑模矢量控制可以改變雙質體振動系統的相位差。在自同步運轉時,振動系統的相位差為-2.90 rad;在控制同步運轉時,振動系統的相位差可以為0或π。對比7(e)和圖7(f)可知,當目標相位差為π時,振動系統的X方向響應顯著增大,上、下質體的運動軌跡均為與水平方向夾角大約為10°的橢圓軌跡。
5 結 論
1)本文采用主從控制結構和滑模控制算法分別設計了雙質體振動系統的2個異步電機的控制器。同時,在MATLAB/Simulink環境中建立了振動系統的機電-控制仿真模型,并進行了自同步和控制同步仿真。通過對比自同步和控制同步的仿真結果,驗證了所設計控制器的可行性和魯棒性。
2)當Y方向共振時,雙質體振動系統不能實現自同步運動;當X方向共振時,該振動系統可以實現相位差為- 2.90rad的自同步運動;但當X方向的固有頻率略小于激振頻率(即ky1=900kN/m)時,振動系統不能實現自同步運動。
3)所設計的控制器可以使雙質體振動系統實現0或π相位差的同步運轉。當X方向和Y方向共振(即ky1=443kN/m和ky1=1 062kN/m)時,相位差為π的同步運動有利于振動系統共振規律的利用。利用此規律,在不改變異步電機激振頻率的情況下,僅采用質徑積較小的異步電機即可實現所需的振幅,有利于節約能源。
4)X方向共振的雙質體振動系統可用于設計振動運輸設備;Y方向共振的系統可用于設計振動篩分設備。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45