基于樹莓派的垃圾智能分類系統(tǒng)設(shè)計(jì)
2023-11-27 06:26:24劉豐儉
南通職業(yè)大學(xué)學(xué)報(bào) 2023年3期
王 科,劉豐儉
(江蘇工程職業(yè)技術(shù)學(xué)院 信息工程學(xué)院,江蘇 南通 226007)
隨著國民經(jīng)濟(jì)的快速發(fā)展,人們的生活方式、消費(fèi)結(jié)構(gòu)有了較大的改變,生活垃圾產(chǎn)量與日俱增,垃圾處理問題變得越發(fā)嚴(yán)峻。目前,通常采取掩埋、焚燒或堆肥等方式處理生活垃圾,易造成土壤、空氣和水資源等環(huán)境污染。有效處理日益增加的生活生產(chǎn)垃圾,更好地回收利用垃圾資源,促進(jìn)經(jīng)濟(jì)的可持續(xù)發(fā)展,有著重要的現(xiàn)實(shí)意義。實(shí)施垃圾分類,可顯著降低垃圾處理成本,提高垃圾循環(huán)再利用價(jià)值,減少資源浪費(fèi)。但是,由于生活垃圾種類龐雜,許多人并不清楚垃圾的準(zhǔn)確類別,導(dǎo)致亂投放,反而增加了垃圾處理的人力和財(cái)力。因而,研究一個(gè)有效的垃圾分類系統(tǒng)尤為重要。針對(duì)垃圾的收集分類,國內(nèi)外市場(chǎng)推出了智能垃圾桶[1-2]。智能垃圾桶大多基于紅外感應(yīng)器、距離感應(yīng)器進(jìn)行設(shè)計(jì),還未能實(shí)現(xiàn)垃圾識(shí)別自動(dòng)分類。近年來,深度學(xué)習(xí)技術(shù)廣泛應(yīng)用于計(jì)算機(jī)視覺特別是圖像分類領(lǐng)域,為垃圾識(shí)別研究提供了新方向[3-5]。本文探究將ResNet 網(wǎng)絡(luò)模型和遷移學(xué)習(xí)相結(jié)合的垃圾分類方法,利用樹莓派硬件設(shè)計(jì)開發(fā)垃圾智能分類系統(tǒng),以期提升日常生活垃圾分類的準(zhǔn)確性和處理效率。
1 系統(tǒng)總體結(jié)構(gòu)設(shè)計(jì)
如圖1 所示,基于樹莓派的垃圾智能分類系統(tǒng)的總體結(jié)構(gòu)分為硬件和軟件系統(tǒng)兩部分。硬件系統(tǒng)包含樹莓派4B 主控板、高清攝像頭、驅(qū)動(dòng)電路及四個(gè)舵機(jī)。四個(gè)舵機(jī)分別連接可回收垃圾、廚余垃圾、其他垃圾和有害垃圾桶蓋,當(dāng)舵機(jī)開啟時(shí),轉(zhuǎn)動(dòng)一定角度,驅(qū)動(dòng)相應(yīng)的垃圾桶蓋打開。軟件系統(tǒng)包含提供用戶交互的前端界面和后端處理模塊。
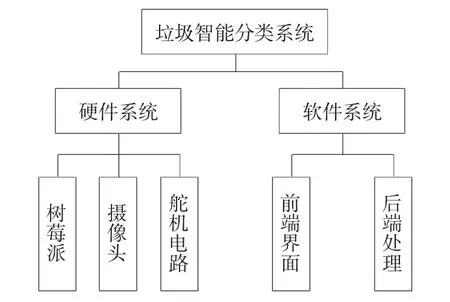
圖1 垃圾智能分類系統(tǒng)結(jié)構(gòu)
垃圾智能分類系統(tǒng)的工作流程如下:
1)用戶將垃圾置于識(shí)別區(qū)域,高清攝像頭采集垃圾圖片,并傳輸至樹莓派后端處理模塊;
2)后端處理模塊調(diào)用已訓(xùn)練的深度神經(jīng)網(wǎng)絡(luò)進(jìn)行模型推理,得到識(shí)別結(jié)果;
3)根據(jù)不同的識(shí)別結(jié)果驅(qū)動(dòng)不同的舵機(jī)進(jìn)行相應(yīng)動(dòng)作,使相應(yīng)類別的垃圾桶蓋自動(dòng)開合。
2 硬件設(shè)計(jì)
系統(tǒng)所需的硬件模塊之一是圖像采集模塊,其功能為連接攝像頭以獲取由攝像頭采集的圖片;模塊之二是舵機(jī)控制模塊,連接四個(gè)舵機(jī)并分別進(jìn)行控制,用于根據(jù)后端處理模塊識(shí)別的垃圾種類驅(qū)動(dòng)舵機(jī),使相應(yīng)的垃圾桶蓋打開,垃圾進(jìn)入對(duì)應(yīng)的箱體。為了能正常運(yùn)行后端處理服務(wù)程序,需要較高的硬件處理能力。樹莓派具有體型較小、功耗較低、性能強(qiáng)大、便于攜帶等諸多優(yōu)點(diǎn),作為嵌入式技術(shù)被廣泛應(yīng)用于工業(yè)、科研等領(lǐng)域。為滿足上述硬件處理要求,選取最新一款型號(hào)為4B的樹莓派作為系統(tǒng)的開發(fā)板,其具有64 位1.5 GHz 四核CPU,2G DDR4 內(nèi)存,且搭載博通Videocore-IV型GPU,擁有串行、USB、Wifi、藍(lán)牙等接口,可運(yùn)行Linux 操作系統(tǒng)。
垃圾智能分類系統(tǒng)的硬件連線如圖2 所示。攝像頭通過USB 口與樹莓派相連接,提供圖像采集功能;舵機(jī)驅(qū)動(dòng)板采用PCA9685,通過產(chǎn)生不同占空比的PWM 波控制舵機(jī)轉(zhuǎn)動(dòng)相應(yīng)角度;樹莓派與PCA9685 驅(qū)動(dòng)板間采用I2C 協(xié)議連接;為保障舵機(jī)驅(qū)動(dòng)能力,PCA9685 單獨(dú)使用一路5 V電源進(jìn)行供電;垃圾分類系統(tǒng)樣品中采用SG90 舵機(jī),力矩為0.147 N·m,工作角速度為200(°)/s,滿足系統(tǒng)工作要求。
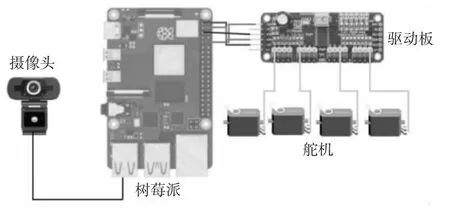
圖2 垃圾智能分類系統(tǒng)硬件連線
硬件系統(tǒng)的工作流程如下:
1)樹莓派通過OpenCV 調(diào)用攝像頭視頻流,獲取視頻和圖片數(shù)據(jù);
2)獲取的視頻流和圖片數(shù)據(jù)經(jīng)后端處理模塊的API 接口傳至后端;
3)等待后端處理結(jié)束得到圖片識(shí)別結(jié)果;
4)根據(jù)識(shí)別結(jié)果驅(qū)動(dòng)相應(yīng)舵機(jī)執(zhí)行動(dòng)作,由Python 的Adafruit_PCA9685 包控制舵機(jī)操作。
3 軟件設(shè)計(jì)
3.1 前端架構(gòu)設(shè)計(jì)
前端頁面功能是提供用戶與系統(tǒng)的交互接口,用戶通過瀏覽器使用系統(tǒng)功能。用Vue.js 框架開發(fā)前端頁面代碼,通過ElementUI 組件提供頁面中的插件功能,最后采用Webpack 工具構(gòu)建完整結(jié)構(gòu),以便于開發(fā)人員快速搭建頁面。垃圾智能分類系統(tǒng)的前端界面包含預(yù)覽和結(jié)果界面頁,見圖3。預(yù)覽界面的功能主要是當(dāng)垃圾置于識(shí)別區(qū)域時(shí)實(shí)時(shí)顯示垃圾圖像;另外,頁面中還有識(shí)別組件,點(diǎn)擊識(shí)別按鈕可傳遞圖像至后端程序。結(jié)果頁面主要展示當(dāng)前垃圾種類的識(shí)別結(jié)果,并且通過控制組件,通知后端程序驅(qū)動(dòng)相應(yīng)的舵機(jī)操作。
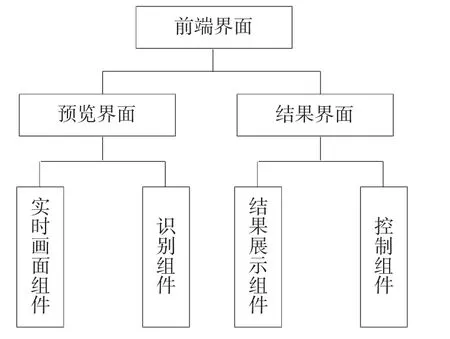
圖3 前端架構(gòu)組成
3.2 后端架構(gòu)設(shè)計(jì)
基于Flask 框架搭建的垃圾識(shí)別平臺(tái)后端程序用于垃圾圖像的處理及推理。Flask 框架是使用Python 語言開發(fā)Web 應(yīng)用的主流框架,具有小巧、輕量級(jí)的特點(diǎn),適合中小型項(xiàng)目開發(fā)。Flask 框架使用MVC 設(shè)計(jì)模式,降低了代碼的耦合性。另外,F(xiàn)lask 自帶Web 服務(wù)器,在非生產(chǎn)環(huán)境中可以直接運(yùn)行,無需使用Apache 或Nginx 服務(wù)器。后端架構(gòu)如圖4 所示,其中包含舵機(jī)驅(qū)動(dòng)、圖像處理和圖像推理三個(gè)模塊。舵機(jī)驅(qū)動(dòng)模塊主要通過上位機(jī)程序產(chǎn)生相應(yīng)的PWM 波驅(qū)動(dòng)舵機(jī)進(jìn)行操作;圖像處理模塊通過OpenCV 生成視頻流,當(dāng)用戶點(diǎn)擊識(shí)別按鈕時(shí),生成一張靜態(tài)圖像并傳遞給圖像推理模塊處理;圖像推理模塊調(diào)用已訓(xùn)練的卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行預(yù)測(cè)并輸出識(shí)別結(jié)果。
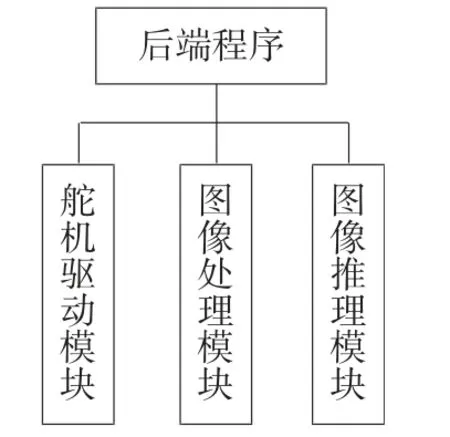
圖4 后端架構(gòu)組成
舵機(jī)驅(qū)動(dòng)模塊的關(guān)鍵代碼如表1 所示。首先創(chuàng)建一個(gè)PWM 實(shí)例,然后設(shè)置PWM 波頻率,最后調(diào)用set_pwm 方法產(chǎn)生PWM 波。servo1 參數(shù)控制PWM 波高電平時(shí)間,通過查找舵機(jī)的參數(shù)手冊(cè),可得舵機(jī)旋轉(zhuǎn)角度angle 和servo1 參數(shù)間的計(jì)算關(guān)系,如式(1)所示。
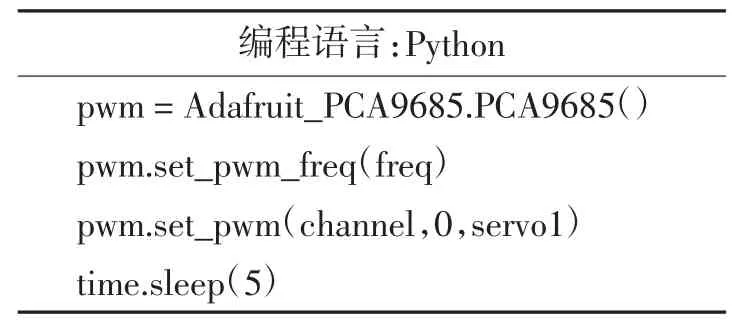
表1 舵機(jī)驅(qū)動(dòng)關(guān)鍵代碼
其中,s 為servo1 參數(shù),a 為旋轉(zhuǎn)角度angle,f 為PWM 波的頻率freq。
圖像處理模塊的關(guān)鍵代碼如表2 所示。通過VideoCapture 方法獲取視頻數(shù)據(jù),保存圖片。當(dāng)用戶在前端點(diǎn)擊識(shí)別按鈕時(shí),調(diào)用此代碼傳遞圖像至圖像推理模塊。
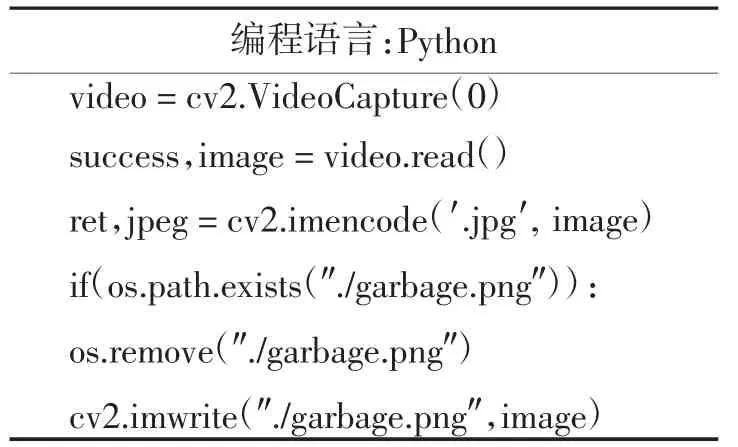
表2 圖像處理關(guān)鍵代碼
在圖像推理模塊中,基于卷積神經(jīng)網(wǎng)絡(luò)搭建ResNet50 網(wǎng)絡(luò)模型,對(duì)ImageNet 數(shù)據(jù)集進(jìn)行預(yù)訓(xùn)練,采用數(shù)據(jù)增強(qiáng)、Dropout、Adam 和早停機(jī)制等關(guān)鍵技術(shù)[6-7]建立訓(xùn)練模型如圖5 所示。由圖5 可見,ResNet50 網(wǎng)絡(luò)分為5 個(gè)階段層,其中第一層結(jié)構(gòu)較為簡(jiǎn)單,即對(duì)輸入進(jìn)行卷積計(jì)算,可視其為對(duì)輸入圖像的預(yù)處理。后4 個(gè)階段由殘差網(wǎng)絡(luò)構(gòu)成,分別用已設(shè)計(jì)的殘差塊依次疊加3,4,6,3次,然后進(jìn)行全連接,再經(jīng)歸一化形成各自類別的概率。采用TensorFlow 的Keras 完成網(wǎng)絡(luò)模型的逐層構(gòu)建和精細(xì)化調(diào)參。

圖5 ResNet50 網(wǎng)絡(luò)模型
4 系統(tǒng)實(shí)現(xiàn)及測(cè)試
4.1 數(shù)據(jù)集訓(xùn)練測(cè)試
選取華為云人工智能大賽提供的垃圾圖像數(shù)據(jù)集進(jìn)行訓(xùn)練和測(cè)試。數(shù)據(jù)集涵蓋了常見的生活垃圾類別,按最新標(biāo)準(zhǔn)分成可回收垃圾、廚余垃圾、有害垃圾和其他垃圾四大類。如表3 所示,數(shù)據(jù)集共有圖片14 802 張,其中最多的是可回收垃圾,有圖像8 611 張,最少的是有害垃圾,有圖像1150張。
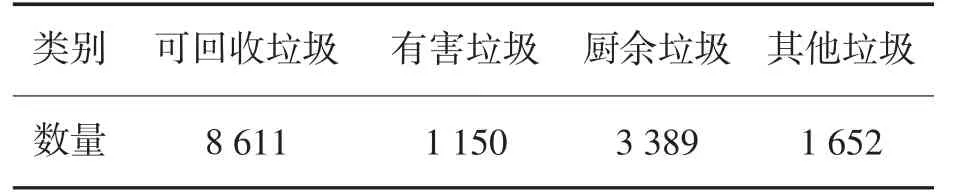
表3 垃圾數(shù)據(jù)集類別及圖像數(shù)量
垃圾圖像標(biāo)簽由兩部分組成,包括4 大類和40 個(gè)小類。其中可回收垃圾包含23 個(gè)小類別,有害垃圾、廚余垃圾及其他垃圾分別包含3 個(gè)、8 個(gè)及6 個(gè)小類別。具體分類如圖6 所示。
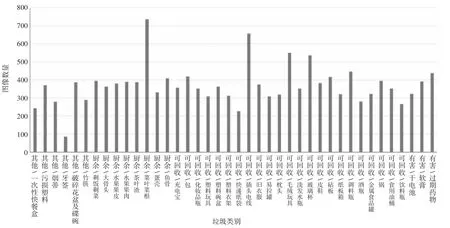
圖6 垃圾數(shù)據(jù)集數(shù)據(jù)分類
對(duì)數(shù)據(jù)集進(jìn)行數(shù)據(jù)增強(qiáng)及歸一化處理后,在數(shù)據(jù)集中隨機(jī)抽取80 %數(shù)據(jù)作為訓(xùn)練集,20 %數(shù)據(jù)作為測(cè)試集,進(jìn)行訓(xùn)練,結(jié)果如圖7 所示。模型在26 輪訓(xùn)練結(jié)束后觸發(fā)了早停機(jī)制,提前終止訓(xùn)練。最終得到垃圾識(shí)別訓(xùn)練準(zhǔn)確率為98.7 %,測(cè)試準(zhǔn)確率為90.8 %。
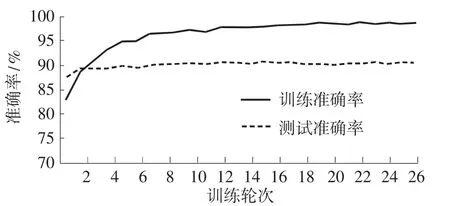
圖7 ResNet50 模型訓(xùn)練結(jié)果
4.2 系統(tǒng)測(cè)試
以Python 為編譯語言開發(fā)垃圾智能分類系統(tǒng),其中圖像推理模塊使用TensorFlow 框架,系統(tǒng)部署方案采用Flask 框架,Web 端界面采用Vue.js框架配合ElementUI 組件庫進(jìn)行構(gòu)建開發(fā)。最后,采用Electron 將整個(gè)Web 應(yīng)用打包,并部署于樹莓派的Raspbian 操作系統(tǒng),實(shí)現(xiàn)模型的系統(tǒng)化與應(yīng)用化。
搭建的系統(tǒng)實(shí)物如圖8 所示。其中:樹莓派與攝像頭之間通過USB 口連接,與PCA9685 之間通過I2C 協(xié)議連接,四個(gè)垃圾桶分別由四個(gè)舵機(jī)控制打開和關(guān)閉。

圖8 垃圾智能分類系統(tǒng)實(shí)物
前端預(yù)覽界面如圖9,其中a)是攝像頭實(shí)時(shí)識(shí)別窗口,b)為識(shí)別按鈕界面。當(dāng)用戶點(diǎn)擊識(shí)別按鈕時(shí),對(duì)當(dāng)前的預(yù)覽圖像進(jìn)行識(shí)別。
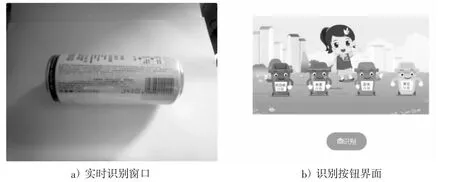
圖9 前端預(yù)覽界面
在識(shí)別窗口放置一個(gè)易拉罐,點(diǎn)擊識(shí)別按鈕,得到的頁面結(jié)果如圖10 所示。由圖10 可以看到,垃圾智能分類系統(tǒng)準(zhǔn)確識(shí)別易拉罐為“可回收垃圾”,并打開相應(yīng)的舵機(jī),控制垃圾桶蓋打開。

圖10 垃圾智能分類識(shí)別測(cè)試結(jié)果
選取6 種不同的垃圾進(jìn)行識(shí)別測(cè)試,結(jié)果如表4 所示。由表4 可見,垃圾智能分類系統(tǒng)對(duì)6 種垃圾識(shí)別無誤,舵機(jī)能很好地驅(qū)動(dòng)相應(yīng)的垃圾桶撥板動(dòng)作,實(shí)現(xiàn)垃圾正確分類回收。測(cè)試結(jié)果表明,設(shè)計(jì)的系統(tǒng)能高效完成常見垃圾的自動(dòng)識(shí)別與分類,滿足智能垃圾桶控制要求。
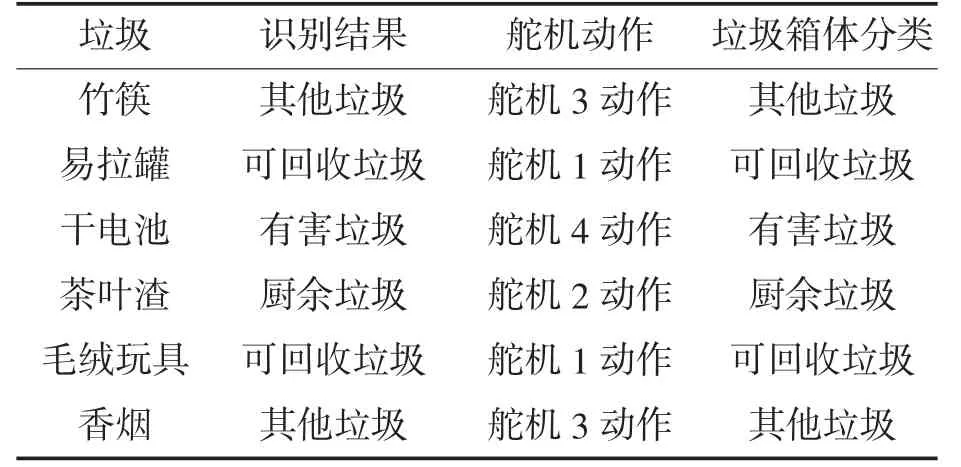
表4 垃圾自動(dòng)分類系統(tǒng)測(cè)試結(jié)果
5 結(jié)語
基于樹莓派硬件設(shè)計(jì)了一種垃圾智能識(shí)別分類系統(tǒng),通過ResNet 網(wǎng)絡(luò)模型與遷移學(xué)習(xí)相結(jié)合的圖像分類方法進(jìn)行垃圾識(shí)別,采用Vue.js 框架配合ElementUI 組件庫構(gòu)建開發(fā)Web 端界面,采用Flask 框架進(jìn)行部署。測(cè)試結(jié)果顯示,所設(shè)計(jì)的垃圾分類系統(tǒng)軟硬件工作穩(wěn)定,能對(duì)常見的生活垃圾進(jìn)行正確分類回收,在垃圾分類和環(huán)境保護(hù)方面具有良好的應(yīng)用前景。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06