基于SDN云網絡架構的全感知虛擬機房系統
2023-12-04 11:12:58谷金宇尚嘉楓矯荻薇王廷杉
計算機工程與設計 2023年11期
谷金宇,張 寧,高 峰,尚嘉楓,矯荻薇,王廷杉
(1.中國人民解放軍63861部隊,吉林 白城 137000;2.中國航天科工集團第二研究院七〇六所,北京 100854)
0 引 言
本文融合應用了SDN網絡架構、大數據、云計算、全景漫游、智能機器人控制,全感知傳感器等技術,構建了一套全感知虛擬機房控制系統。以SDN網云端網絡架構為基本平臺,利用現有的物理模型、傳感器、數據庫,構建虛擬數字空間,將溫濕度、水位、電梯、消防、門禁、工業視頻和機器人自動化分析處理系統采集來的信息進行智能處理融合與虛擬化構建。完成對數據中心設備與傳感器的數據采集、分析、告警和展示等功能,實現了數據中心設備運行數據和環境數據的實時監測控制,巡檢機器人配合VR數字全景漫游,可實現機房全面巡查,發現異常可遠程指揮控制巡檢機器人,排除設備隱患和故障。系統智能化、數字化、全面保障機房基礎設施及應用系統的高效運轉,極大提升了數據中心信息智能化水平。
1 系統總體設計
整個系統包含硬件、軟件兩部分。硬件部分包含基于SDN的網云端網絡架構,為整個系統構建的基本平臺,網絡設計采用三層架構;智能門禁與智電梯系統采用RFID射頻識別技術,用于檢測識別附近是否有合法的RFID卡,自動開啟智能門鎖;智能消防系統用于控制消防聯動系統[5],配備的聲光報警;智能排水系統用于實時采集水情信息,自動判斷水情并逐級啟動水泵,排出機房存水;智能恒溫控制系統接收溫度傳感器、電暖氣、排風機返回的信號,判斷機房溫度及設備運行情況;機器人自動化分析處理系統用于視頻采集傳輸與自動巡檢。數據中心專家系統為系統采集顯示軟件;SDN網絡控制軟件為底層資源控制分配軟件;機器人組態軟件用于機器人采集信息圖形化展示。系統基本框架如圖1所示。
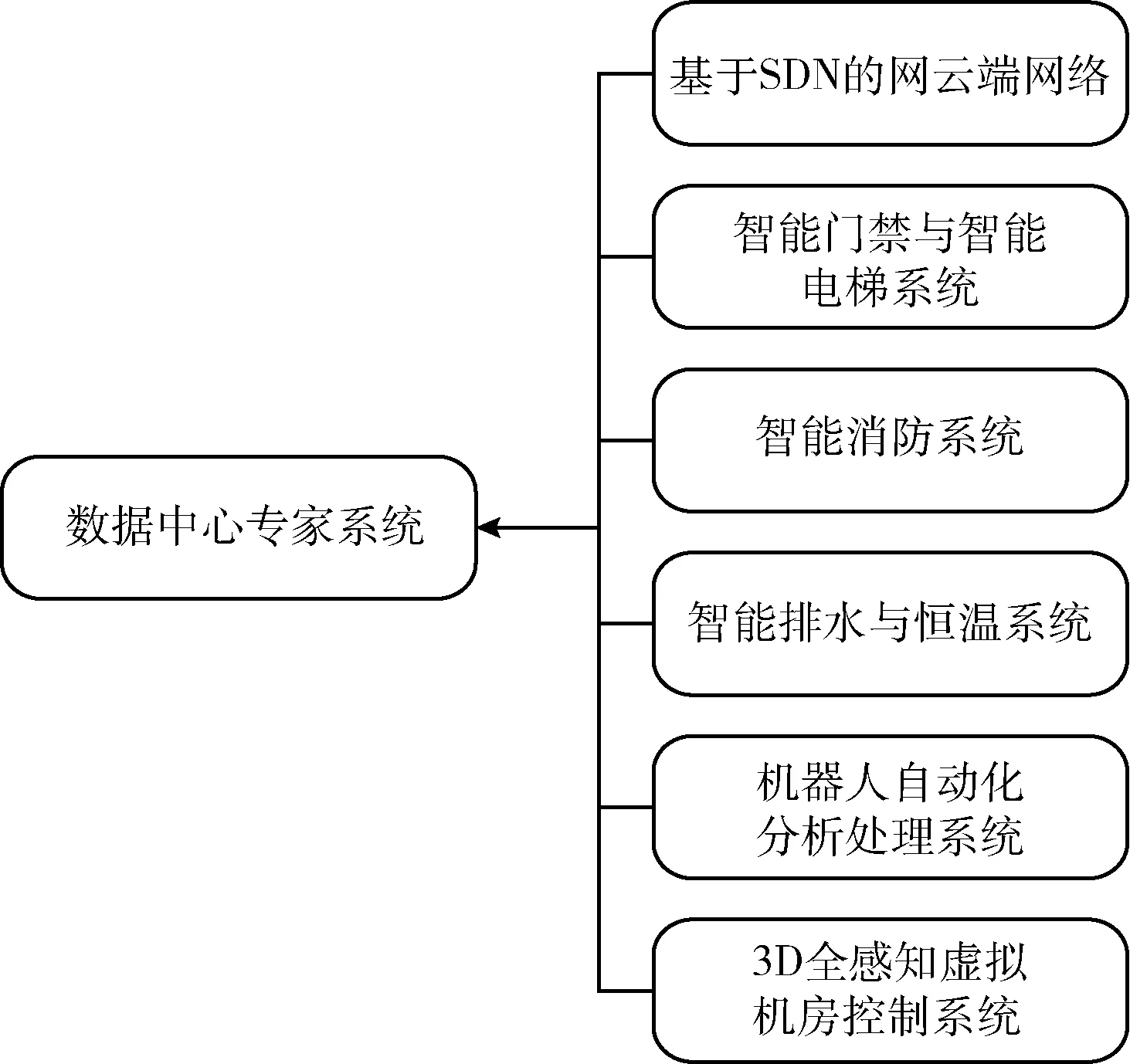
圖1 系統總體框架
1.1 基于SDN的網云端網絡架構
本系統搭建一套基于網云端架構的自主創新云協同辦公平臺[1]。私有云建設引入云化技木[2]、虛擬技術和SDN技木[3]等,網絡信息化體系按照“網云端”架構,架構分為資源層、服務層、應用層,并采用SDN控制的Dijkstra算法控制。技術架構如圖2所示。
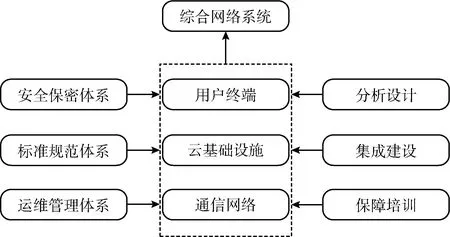
圖2 網絡總體架構
系統設置資源層,為系統提供高速交換和轉發功能。網絡虛擬化系統云平臺服務設備提供管理接入功能。
系統設置應用服務層,為應用服務器云平臺提供萬兆網絡接入服務,配置安全保密區提供安全支撐,實現系統的安全保障服務。
系統設置存儲區,包含桌面云存儲和私有云存儲。
系統設置運維管理區,運維管理區為普客戶機,鏈接云平臺、硬件設備、應用系統、身份認證等軟硬件系統的統一管理和運維,管理網與業務網隔離。
容災備份服務區為系統提供數據容災備份服務。
系統設置用戶應用層,提供終端接入網絡服務,用于部署數中心專家系統軟件及輔助監控采集軟件,用于擴展軟件開發與應用,用于數據中心視頻信息系統顯示,用于監控報警系統顯示,用于機器人系統顯示與控制。
本系統應用基于SDN控制的Dijkstra算法設計。SDN是將傳統的數據平面與控制平面緊耦合的結構,改變為數據平面與控制平面解耦分離的結構,將路由器的網絡控制平面功能集中到SDN控制器。算法步驟如下:
定義G={V,E}
(1)定義變量S和T,并初始賦值,S={V0},T=V-S={其余頂點}。
(2)從T中選一個與S中頂點有關聯的且權值最小的頂點W,加入到S。
(3)對T中其余頂點的距離值進行修改:若W作中間頂點,距離縮短,則修改此距離值。
重復上述步驟(2)、(3),直到S中包含所有頂點。
程序代碼如下:
type
bool=array[1..10]ofboolean;
arr=array[0..10]ofinteger;
var
a:array[1..10,1..10]ofinteger;
c,d,e:arr;
i,j,n,m:integer;
inf,outf:text;
begin
assign(inf,inputfile);
assign(outf,outputfile);
reset(inf);
rewrite(outf);
read(inf,n);
for i:= 1 to n do
begin
for j:= 1 to n do
begin
read(inf,a[i,j]);
if a[i,j]=0 then
a[i,j]:=10000;
end;
end;
end;
proceduredijkstra(qi:integer;t:bool;varc{,d}:arr);
var
i,j,k,min:integer;
begin
t[qi]:=true;
for i:= 1 to n do
d[i]:= qi;
d[qi]:=0;
for i:=1 to n do
c[i]:=a[qi,i];
for i:= 1 to n-1 do
begin
min:=maxint;//改為最大值
for j:=1 to n do
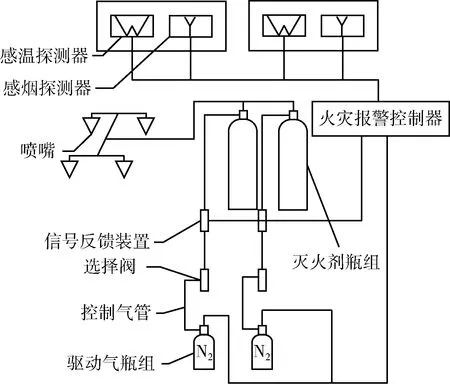
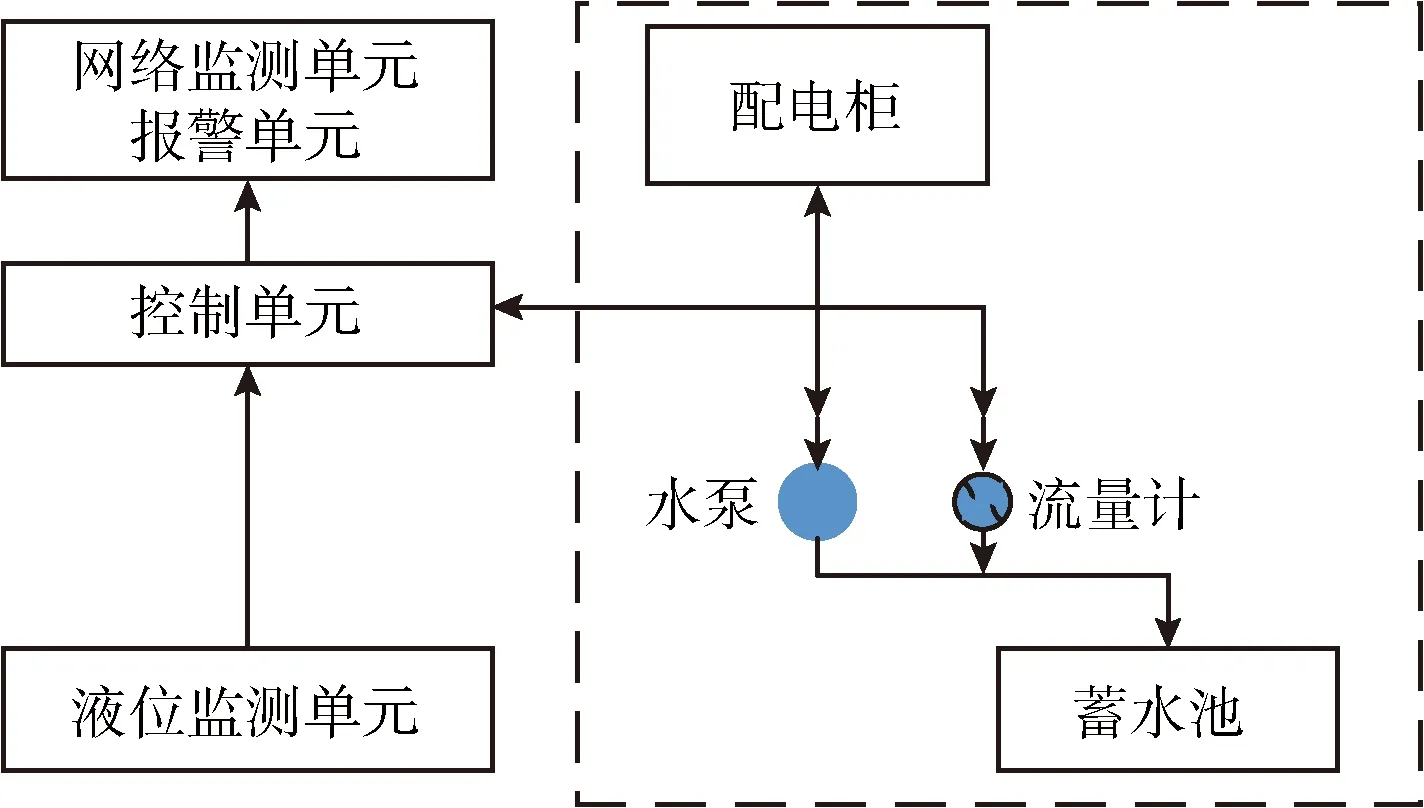
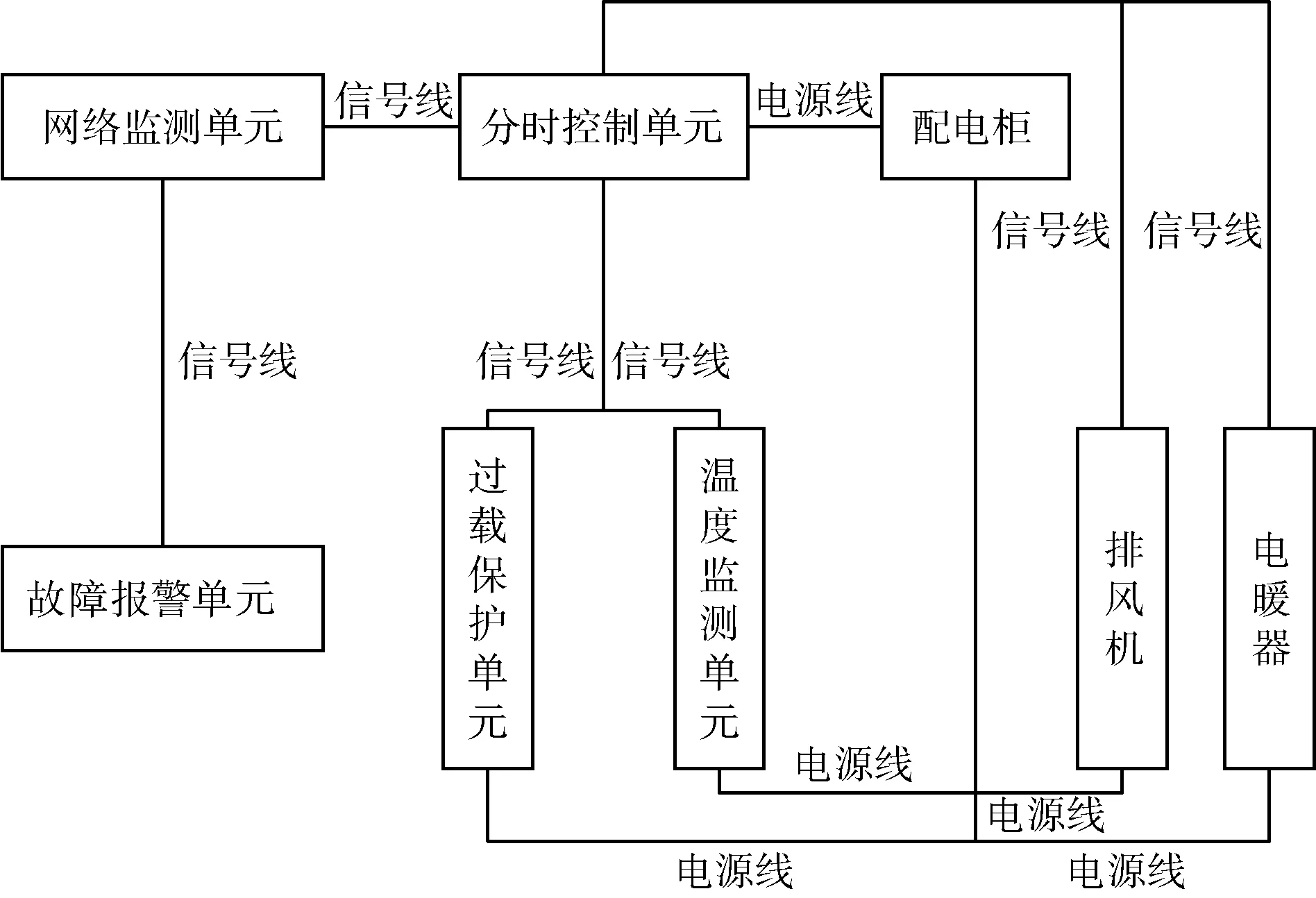
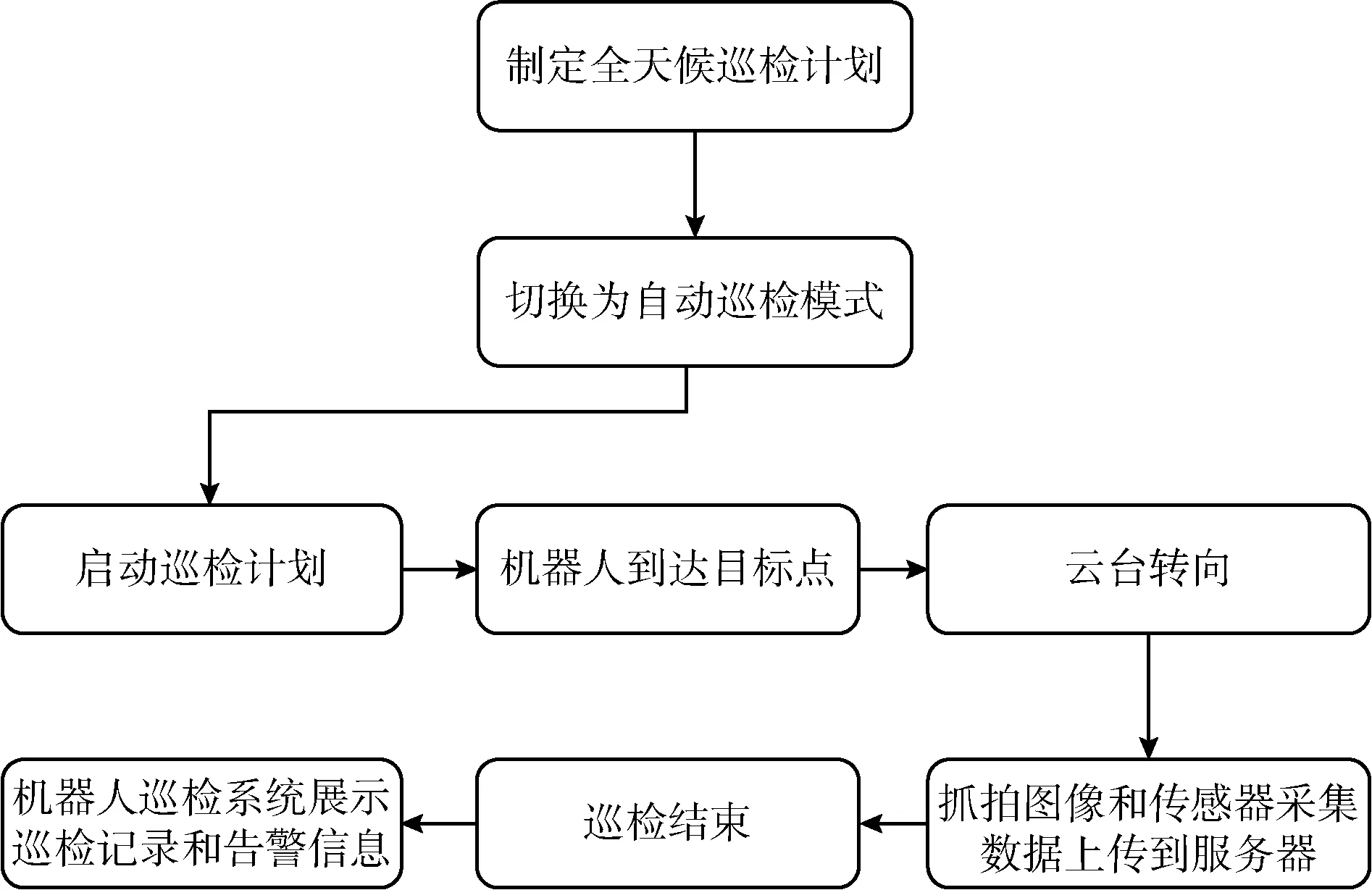
if(c[j] begin k:=j; min:=c[j]; end; t[k]:=true; for j:=1 to n do if(c[k]+a[k,j] begin c[j]:=c[k]+a[k,j]; d[j]:=k; end; end; end; procedure make(zh:integer;d:arr;vare:arr); var i,j,k:integer;//節點個數 begin i:=0; while d[zh]<>0 do begin inc(i); e[i]:=zh; zh:=d[zh]; end; inc(i); e[i]:=qi; e[0]:=i; end; 通過實驗仿真比較單向Dijkstra算法、雙向Dijkstra算法、A*算法的計算效率。隨機多次選取樣本,記錄最短路徑計算的運行時間以及擴展節點數量。對比分析如圖3所示。 仿真實驗結果表明大部分情況下,DIjkstra算法在搜索空間和計算效率上均優于A*算法,SDN控制的網云端網絡架構可極大提高網絡的計算效率,縮短計算的運行時間。 智能門禁與智能電梯系統是數據中心安全管理的重要組成部分。智能門禁采用RFID射頻識別技術[4]用于檢測識別附近是否有合法的RFID卡,自動開啟智能門鎖。外來訪客則需要通過門禁系統與管理員取得聯系。訪客能通過智能門禁系統來錄制語音消息,經服務器將語音消息發送至數據中心專家系統訪客通過智能門禁系統可實時視頻,智能門禁系統將視頻數據實時發送至數據中心專家系統軟件和管理員手機客戶端,當訪客關閉視頻連接請求時停止,訪客與管理員溝通后,管理員可發送指令給門禁系統,開啟或關閉門鎖。智能電梯系統能夠對電梯進行有效管理,通過管理軟件給RFID射頻卡授權,經過授權后的射頻卡可以按規定使用電梯。在電梯使用過程中,用戶只可以上到射頻卡被授權的樓層和區域。對于訪客管理,采用與門禁系統聯動控制,訪客與管理員通過門禁系統聯系后,管理員通過數據中心專家系統軟件將信號發送給智能電梯系統,系統接收到管理員信號后,可將訪客送至指定樓層與區域。通過智能門禁與智能電梯管理,有效做到了各層與區域的安全管理,極大提高了數據中心的安全性。數據中心提供雙路市電輸入,配備模塊化UPS系統[5]。 智能電梯與智能門禁系統是數據中心安全管理的重要組成部分。自動化控制部分接入數據中心專家監測控制軟件系統,可實時監控門禁系統和電梯系統設備運行狀況,也可在數據中心專家控制系統軟件內啟停設備。系統框架如圖4所示。 消防系統是保障數據中心設備免于火災事故的必要保障手段,包含火災探測器、控制器、報警裝置等。煙霧感知傳感器安裝機房屋內上方,當數據中心出現火災或大量煙塵時,煙霧感知傳感器第一時間發出報警信號,數據中心專家控制軟件中顯示報警信息,控制消防聯動系統[6],配備的聲光報警裝置同時響應動作。管理員可在數據中心專家軟件中打開氣體消防設備進行滅火,也可設置自動開啟設備滅火。系統控制如圖5所示。 圖5 氣體消防控制系統 數據中心在建設之初設計的排水系統未考慮雨水倒灌、供暖管道和消防管道季節性事故,易導致機房被水浸泡,如遇雷雨天氣或晚間降雨,會給設備帶來損毀隱患,給巡檢人員人身帶來威脅。智能排水系統[7]有效解決了事故漏水浸泡地下機房及其引起的人員和設備安全問題。該控制系統能實時采集水情信息,自動判斷水情并逐級啟動水泵,排出機房存水,通過網絡和串口協議,將存水情況傳輸至數據中心專家控制系統顯示,達到閾值水位可啟動遠程報警。經實際安裝使用后驗證,可有效應對各種管道爆裂和雨水倒灌造成的機房險情,極大程度保證了人員和設備的安全。 本系統為一種機房自動檢測控制系統的設計主控單元為西門子PLC可編程控制器[8],主要元器件為傳感器、流量計和報警器。通過對采集的液位信號融合判斷控制水泵、蜂嗎器、聲光報警器動作,系統可實現位機房液位的采集、顯示、閾值報警和水泵啟停智能控制。控制器可安裝布置于機房內任意墻體下方控制箱內,信號采集部分可布置于機房內任意地板下方,水泵安裝至機房內靠墻一側地板上,地板開孔安裝,控制箱靠墻一側安裝,與水泵及傳感器就近選址。 控制核心為西門子PIC可編程控制器,模塊中可實現采集信號處理、閾值判斷、控制信號輸出及報警信號輸出,通過屏蔽信號線和網線與傳感器、顯示器相連接,在可編程控制器模塊中運用梯形圖編寫各類傳輸程序。實現輸出控制和報警控制并將采集的數據傳輸至顯示器進行圖表化顯示。液位傳感器可選擇浮球式液位傳感器和激光液位傳感器。安裝方式可選擇固定式螺紋安裝和浮球式安裝。浮球式液位傳感器和激光液位傳感器實時將信號傳送至PLC可編程控制器,控制器將采集的模擬信號轉變為數字信號,傳送至顯示器可視化圖標軟件中實時顯示[9]。數據中心專家控制系統顯示各類采集信息。排水系統如圖6所示。 圖6 智能排水控制系統 機房在建設之初不具備專門的溫度控制系統,機房溫度過高或過低都會造成設備的故障、損壞、老化,增加設備的維護成本。存儲設備一旦損壞,將會導致數據丟失,無法恢復。極端的溫度環境也會造成維護人員工作困難,降低維護效率,增加維護成本。智能恒溫控制系統[10]通過控制單元接收溫度傳感器、電暖氣、排風機返回的信號,判斷機房溫度及設備運行情況,通過網絡監測控制單元向數據中心專家控制系統發送溫度信息及設備運行情況信號,實現溫度自動調節、火災及防凍預警,設備自動監控,可以及時處理機房環境溫度隱患問題,不需要人為干預,也可以實時向管理人員反應環境隱患,令管理人員實時了解機房環境溫度情況,及時處理隱患問題,可有效降低機房環境溫度隱患,有效應對火災和防凍險情。避免了暖氣管道爆裂等事故造成機房設備損壞的隱患,減輕了維護人員工作困難。 智能恒溫系統采集紅外測溫傳感器、溫度開關的模擬信號,將采集的信號傳送至可編程控制單元。可編程控制器通過對比融合控制電暖氣、風機、蜂鳴器、聲光報警器動作,網絡通信與監測軟件實現數據高速通信、實時顯示,系統可實現機房溫度的采集顯示、報警,實現電暖氣、排風機的智能控制。溫度監測單元包括紅外測溫傳感器和溫度開關,均通過信號線分別與控制單元相連。紅外測溫傳感器安裝于機房四圍電暖氣上端,當機房內四圍溫度變化時,紅外測溫傳感器采集墻面附近溫度,判斷機房溫度。溫度開關安裝于機房電暖氣下方,通過采集電暖器下方溫度判斷周圍顯度。電暖氣、溫度開關、紅外測溫傳感器均設有4個以上,設置溫度閾值,當機房溫度達到閾值時,按區域啟動、停止電暖氣、排風機的工作。 通過控制單元實時接收紅外測溫傳感器、溫度開關的溫度信息,同時接收電暖器、排風機運行狀態。PLC控制系統[11]通過分析控制電暖氣,排風機的工作狀態,并通過網絡監測單元向數據中心專家控制系統和指定管理人員及時發送故障情況,實現溫度自動調節、火災和防凍預防自動報警、供暖自動監控,可以及時處理機房過熱或過冷的環境問題,不需要人為干預,也可以實時向管理人員反映溫度過高或過低的安全隱患,有效應對各種環境溫度造成的機房險情。智能恒溫系統如圖7所示。 圖7 智能恒溫控制系統 實景漫游采用巡檢機器人系統,主要采用主從式(C/S)構架[12],巡檢機器人系統包擴遠程檢測及控制系統、視頻采集系統、傳感器檢測系統等。用磁軌道導航方式和激光導航方式全面巡視。巡檢機器人主要功能如下: (1)視頻采集傳輸功能。 (2)自動巡檢功能。當機器人收到巡檢指令時,機器人按系統預設的激光導航功能,在規定路線上進行巡邏檢查,把采集到的視頻數據傳輸至數據中心專家系統,將采集的視頻數據實時存入數據庫,方便查看。 (3)機器人具備對動態物體的檢測和跟蹤功能。機器人在執行巡檢指令時,其安裝的傳感器探測發現有火焰、煙霧、溫度過載等情況,發出報警,報警信息傳送至數據中心專家系統。 (4)機器人具備遠程操作功能。數據中心工作人員可以對機器人進行遠程控制,查看報警信息,可以手動控制機器人,使其移動到便于觀測地點,詳細觀察事故情況、分析事原因。 機器人啟動后,按照程序設定,自動初始化電機驅動模塊、攝像頭模塊,對機器人系統進行復位工作,按程序設定連接至模塊路由器。初始化程序中設定對電池電量自行檢測功能,如果低于閾值,機器人無法按操作員指令啟動,機器人自動按軌跡返回充電位置進行充電。若電量高于閾值,機器人則正常啟動,機器人將自身攜帶的視頻系統信號傳輸至數據中心,工作人員可以在數據中心專家系統上對機人傳輸的視頻進行查看,工作人員此時可開啟機器人自動巡檢功能,機器人收到信號后,按預設程序進行巡檢。程序會對機器人巡檢過程中傳輸的視頻進行分析處理、判斷,如發現可能出現異常的情況,機器人會向數據中心發出報警信號。工作人員可以通過數據中心專家系統遠程查看異常情況或將機器人切換至手動控制狀態,移動機器人位置,控制機器人手臂完成危險處置操控并排除警報。機器人巡檢控制如圖8所示。 圖8 機器人巡檢控制 技術人員也可通過頭戴VR,對機房進行無紙化巡檢,實現虛擬現實中機器人軌跡跟蹤[13]。基于5G和VR技術,VR眼鏡采集巡視設備的細節數據,并實時傳回后臺,技術人員可遠程分析,準確處置,極大提高工作效率。自主巡檢機器人搭載電源、自動控件、雙星定位模塊和5G通訊模塊等部件,在不使用時自動回到指定位置待命,一旦收到工作指令,自主執行巡檢任務。 自動巡檢機器人配合VR數字全景漫游,實現了機房的全面巡查,發現異常可遠程指揮控制機房的巡檢機器人,排除設備隱患和故障。VR系統視覺如圖9所示。 圖9 VR控制系統視覺 機器人巡檢系統采用蟻群優化算法(ACO)。在機器人巡檢系統中,提供到達設備的最短路徑,并且任何設備只能被訪問一次。ACO算法的第一步是初始化信息素蹤跡和機器人參數。蟻群機器人算法優化流程如圖10所示。 3D可視化計算機管理是應用人機交互的三維數據協同可視仿真技術[14],構建一套3D的虛擬現實場景[15],用戶可在虛擬場景中進行信息的管理、查詢、檢索、監控等操作。 機房建模如圖11所示。 圖11 虛擬機房建模控制系統 3D數據中心系統采用BS架構進行設計[16],3D全感知虛擬機房控制系統設計采用層次包圍盒算法(BVH),利用圖元細分的光線相交加速方法,將圖元被劃分為不相交集的層次結構。 3D的虛擬現實機房實景漫游需對機房內建模進行碰撞檢測,利用BVH算法,將要存儲的每個圖元體的包圍盒質心、其完整的包圍盒和其索引存儲在BVHPrimitiveInfo的結構體數組中。 std::vector for (size_t i = 0; i primitiveInfo[i]= { i,primitives[i]->WorldBound() }; structBVHPrimitiveInfo { BVHPrimitiveInfo(size_tprimitiveNumber,const Bounds3f &bounds) :primitiveNumber(primitiveNumber),bounds(bounds), centroid(.5f * bounds.pMin +.5f * bounds.pMax) { } size_tprimitiveNumber; Bounds3f bounds; Point3f centroid; }; 然后開始構建層次結構,每一次遞歸接受一個左閉右開的區間,若區間中的圖元數小于一個給定的值(葉節點最大圖元數目),則遞歸終止并返回一個葉節點。 BVHBuildNode//構建層次結構*BVHAccel::recursiveBuild(MemoryArena&arena, std::vector int end,int *totalNodes, std::vector BVHBuildNode*node= arena.Alloc (*totalNodes)++; < intnPrimitives = end-start; if (nPrimitives == 1) { < intfirstPrimOffset =orderedPrims.size(); for (int i = start; i { intprimNum= primitiveInfo[i].primitiveNumber; orderedPrims.push_back(primitives[primNum]); } node->InitLeaf(firstPrimOffset,nPrimitives,bounds); return node; } else { < < } return node; } < Bounds3f bounds; for (int i = start; i bounds=Union(bounds,primitiveInfo[i].bounds); At leaf nodes,the primitives overlapping the leaf are appended to the orderedPrims array and a leaf node object is initialized. < intfirstPrimOffset = orderedPrims.size(); for (int i = start; i intprimNum = primitiveInfo[i].primitiveNumber; orderedPrims.push_back(primitives[primNum]); } node->InitLeaf(firstPrimOffset,nPrimitives,bounds); return node; 對于每一個節點檢查光線和該節點的包圍盒是否相交,不相交則不再需要對該節點的子節點進行遍歷,相交且該節點為葉節點,則對該葉節點下的每一個圖元進行相交測試,若該節點為內部節點則對遍歷其子節點進行遍歷。 數據中心專家系統是一個智能計算機程序軟件,應用人工智能技術對采集的數據進行處理,對危險情況自動采取措施并報警。本文將智能門禁與電梯系統、智能排水系統、智能恒溫控制系統、機器人巡檢系統、實景漫游系統及虛擬機房控制系統集成在專家系統中,可以實時監測機房內數據并完成設備遠程控制。專家系統如圖12所示。 基于SDN云網絡架構的全感知虛擬機房控制系統目前應用在靶場數據中心,已建立完成一套動態環境監測系統、一套智能排水系統、一套智能恒溫系統。并已經設計開發了智能門禁與智能電梯系統、智能消防系統及智能機器人輔助系統,將全部應用于全感知虛擬機房控制系統中。本系統經過實際驗證后能達到預期要求,可準確監測數據中心各設備狀態,可在數據中心專家系統軟件中實時顯示溫度、消防、電梯、門禁、排水、機器人巡檢狀態等各類信息;出現異常后,專家系統可顯示報警信息,并將情況報告給管理員,實現對設備和環境的實時監測和控制。 基于SDN云網絡架構的全感知虛擬機房控制系統的全部設備接入數據中心專家管理系統,完成對數據中心設備與傳感器的數據采集、分析、告警和展示等功能,可實現機器人自動巡檢和VR 數字全景漫游巡檢。隨著新技術、新領域的不斷發展,本系統未來可接入更多的智能監測控制系統。數據中心全感知控制系統也可應用于其它領域,相信未來全感知控制系統的應用與研究,將會有廣闊的發展前景。1.2 智能門禁與電梯系統
1.3 智能消防系統
1.4 智能排水系統
1.5 智能恒溫系統
1.6 機器人實景漫游系統
1.7 3D全感知虛擬機房控制系統
1.8 數據中心專家控制系統
2 應用驗證
3 結束語
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58文苑(2018年23期)2018-12-14 01:06:06文苑(2018年19期)2018-11-09 01:30:14文苑(2018年17期)2018-11-09 01:29:26文苑(2018年21期)2018-11-09 01:22:32電子制作(2018年11期)2018-08-04 03:26:08家庭影院技術(2017年9期)2017-09-26 03:41:45
