基于虛擬電阻的復雜直流網絡P-V下垂控制方法
2023-12-08 14:35:48王辭喻趙興勇
科學技術與工程 2023年31期
關鍵詞:系統
王辭喻, 趙興勇
(山西大學電力與建筑學院, 太原 030031)
隨著化石能源的枯竭和環境污染問題的日益凸顯,以風、光為主的可再生能源分布式發電受到社會各界的廣泛重視。為應對分布式能源隨機性、間隙性等特性,解決其可靠接入的問題,微電網作為解決方案被提出[1]。
為了保證微電網的穩定運行,需要制定一套有效的控制管理策略,以滿足不同的系統要求。文獻[2]提出了一種用于低慣量系統的多端柔性直流輸電(voltage source converter based on multi-terminal direct current,VSC-MTDC)系統的協調控制策略,但面對大擾動時,該方法精度較差。文獻[3]對VSC-MTDC系統發生大擾動時會造成頻率變化的問題進行優化,在換流器控制系統中加入功率-頻率(P-f)下垂控制,但沒有考慮線路阻抗的因素。文獻[4-5]分別提出基于線路阻抗不一致影響下的微電網功率分配控制策略,實現了系統功率的精確分配。文獻[6]針對低壓微電網下并聯逆變器在容量比和線路阻抗比不一致的條件下無法實現功率合理輸出的問題,結合傳統下垂方法提出了一種改進的控制策略。同時,多電平換流器多端柔性直流輸電(modular multilevel converter multi-terminal direct current transmission, MMC-MTDC)系統中,其電壓質量容易受功率波動影響、直流電壓偏差較大,不利于系統的安全穩定運行。 針對這一問題,文獻[7]提出了一種不平衡功率可調節范圍的量化分析方法。
與此同時,直流微電網不存在交流微電網中的頻率、無功、相位等問題,具有控制簡單、線路損耗低、系統成本低、可靠性高等優勢,因此更多人把目光放在了直流微電網的研究[8]。文獻[9]提出一種基于下垂曲線截距調整的直流微電網自適應虛擬慣性控制(adaptive virtual inertia control,AVIC)方法,然而其對并聯運行時的系統功率均分準確度較差。對此,文獻[10]提出了一種基于改進動態下垂控制的微電網控制方法,用于提高分布式電源并聯運行時的系統功率均分準確度以及負荷變化時的系統穩定性。此外,文獻[11]提出一種考慮線路電阻影響的自適應下垂控制。但在傳統電壓-電流(V-I)型下垂控制中,會存在輸出電流分配不均和母線電壓不穩定的問題。針對該問題,文獻[12]提出一種帶有電壓補償的改進I-V型下垂控制策略。對于傳統下垂控制,可改進的地方還有很多。例如文獻[13]基于微網逆變器輸出功率解耦的研究取得成果,提高了下垂控制的功率分配精度和系統的穩定性。文獻[14]提出基于虛擬阻抗和模糊比例-積分-微分(proportional integral differential,PID) 的低壓微電網下垂控制策略,用于解決在低壓微電網中負荷發生波動時,P-V/Q-f(Q為無功功率)下垂控制對功率分配、系統電壓和頻率同時進行控制的精準度就會下降的問題。
除了對傳統下垂控制的本身進行改進,研究人員同樣對控制回路之外的各個方面進行優化。文獻[15]提出了一種用于減小電流傳感器數量的改進下垂控制方法,進一步提高了下垂控制的經濟性,但其功率分配精度略有下滑。文獻[16]提出雙重下垂控制,該算法采用兩級下垂控制,改進后的一級下垂控制用于補償線路阻抗造成的功率偏差,實現直流母線電壓穩定;二級下垂控制實現同類型儲能單元間的功率分配。但該方法對通信網絡的要求過高。為了降低系統運行對通信網絡的依賴,文獻[17]提出一種計及效率特性的直流微網經濟下垂控制策略。針對環流問題,文獻[18]引入了純感性的虛擬阻抗,在減小功率耦合的同時提高了環流抑制效果,同時針對虛擬阻抗的使用而導致的母線電壓跌落,在無功下垂控制回路中使用了電壓補償,減小電壓跌落的同時得到了更加精準的輸出電流。
但上述方法的研究都是基于簡單系統的下垂控制優化,文獻[19]提出一種基于自律分散控制的網孔型直流電網下垂系數計算方法,但其忽略了對特殊節點的處理,當某個節點及其附近的節點的接入電壓明顯高于或弱于均值時便無法處理。文獻[20]提出了一種復雜直流電網下垂系數的計算方法,但其針對的對象是高電壓等級的電網,在高壓下忽略了部分阻抗對控制系統的影響。上述對中小復雜直流電網的研究較少,且大多是在放射狀結構的基礎上進行分析和處理,對于環網式直流微電網和群網式直流微電網等復雜微電網尚未有較好的處理方法。
綜上,現提出一種對中小型直流復雜電網的等效方法,將復雜拓撲結構等效為放射狀拓撲結構。首先,定義虛擬母線并將各個節點的平均值及中位數值之和的一半定義為虛擬電壓值,再將直流母線與直流系統中電壓值相等的點相連,這些點為虛擬節點。按虛擬節點在不同支路中的存在情況將系統節點分為3類節點并分別進行處理,得到一個等效放射狀直流電網拓撲結構。隨后,根據化解結果進行公式代換得到P-V下垂控制的系數公式。最后在MATLAB/Simulink中搭建了4端直流電網仿真模型,對基于虛擬電阻的P-V下垂控制策略的各項數據進行仿真驗證。上述研究可以大幅度簡化一般性復雜網絡的下垂系數求取復雜度及減少大量的運算次數。
1 復雜系統的優化方法
假設直流系統穩定,復雜直流系統的優化方法分為三步,首先確定虛擬母線電壓值,然后對節點進行分類并處理,最后得出等效拓撲圖。
1.1 虛擬母線電壓
虛擬母線電壓值V*定義為:各節點電壓值的平均值Vave和中位數Vmid之和的一半。該定義可有效減少第三類節點的數量,降低運算難度。
(1)
系統中與虛擬母線電壓值相等的點定義為虛擬節點,同時根據支路中包含虛擬節點的情況將系統節點分為以下3類節點。
1.2 第一類節點
以自身為中心散出去的支路中全部含有虛擬節點的節點為第一類節點。其等效電阻為
(2)
(3)
式中:ri,v為節點i到虛擬節點的電阻;rij為節點i到節點j的電阻;Vi和Vj分別為節點i與節點j的節點電壓;ri為節點i到虛擬母線的等效電阻。
第一類節點的等效本質為:節點與虛擬母線的并聯,如圖1所示。
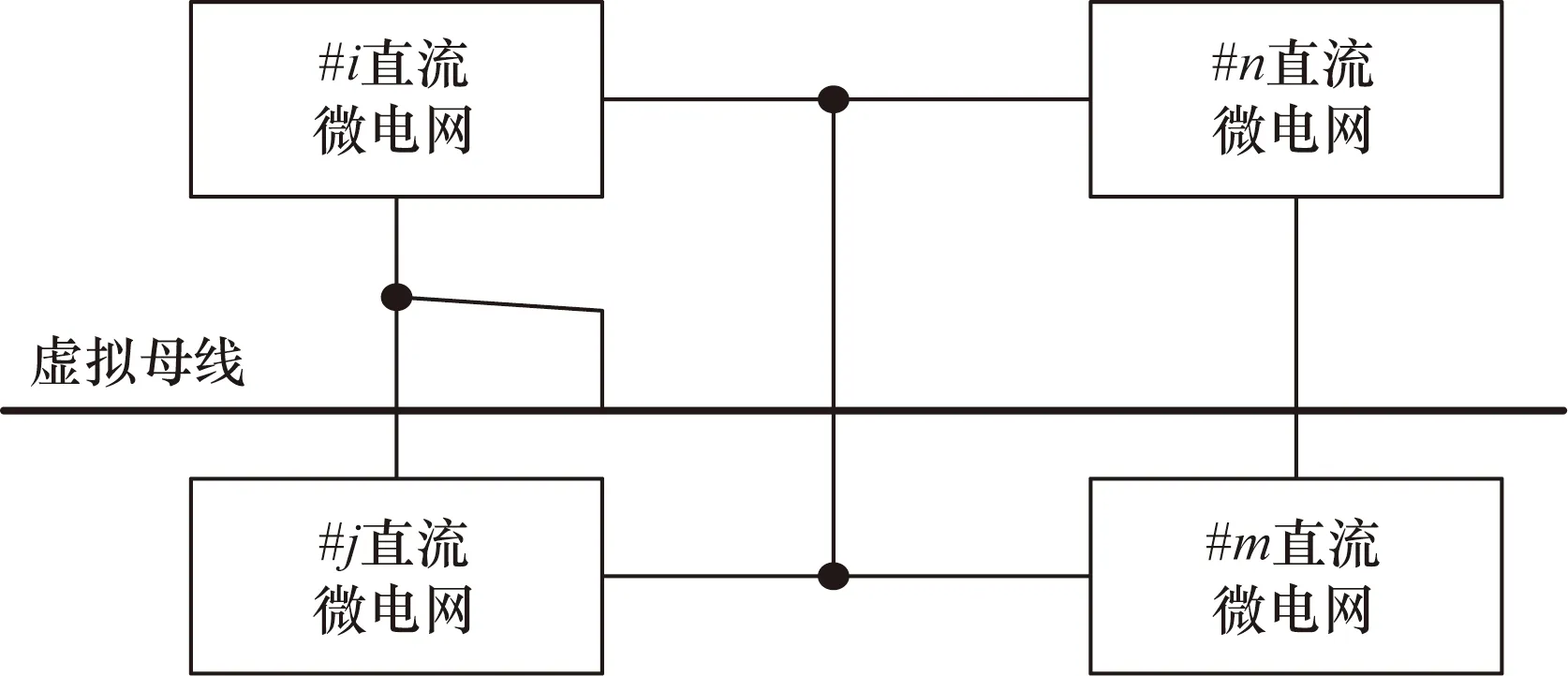
圖1 第一類節點Fig.1 The first type of node
1.3 第二類節點
以該節點為中心散出去的支路,部分有虛擬節點,另一部分無虛擬節點的節點為第二類節點。如圖1中的m節點和n節點。根據基爾霍夫定律總結當前電路節點的電流電壓關系,然后根據對外等效的原則對目標數值進行推算。第二類節點的電路等效圖如圖2所示,存在如下關系:

(4)
式(4)中:Ii、Ij、Iv分別為i節點、j節點、虛擬節點的電流;Vi、Vj、V*分別為i節點、j節點、虛擬節點的電壓;rvi、Ivi為i節點與虛擬節點之間的虛擬電阻值及電流值;rij、Iij為i節點與j節點之間的電阻值及電流值;rvj、Ivj為j節點與虛擬節點之間的虛擬電阻值及電流值;r′vi、I′vi為等效轉換后節點i與虛擬節點的等效虛擬電阻及電流;r′vj、I′vj為等效轉換后節點j與虛擬節點的等效虛擬電阻及電流。

圖2 第二類節點Fig.2 The second type of node
經過等效代換,可得
(5)
(6)
如此,便可根據式(5)或式(6)得到該節點到虛擬節點的等效虛擬電阻。
1.4 第三類節點
以該節點為中心散出去的所有支路,不存在任何虛擬節點的節點為第三類節點。第三類節點的電路等效圖如圖3所示,存在如下關系:
(7)
經過等效代換,可得
(8)
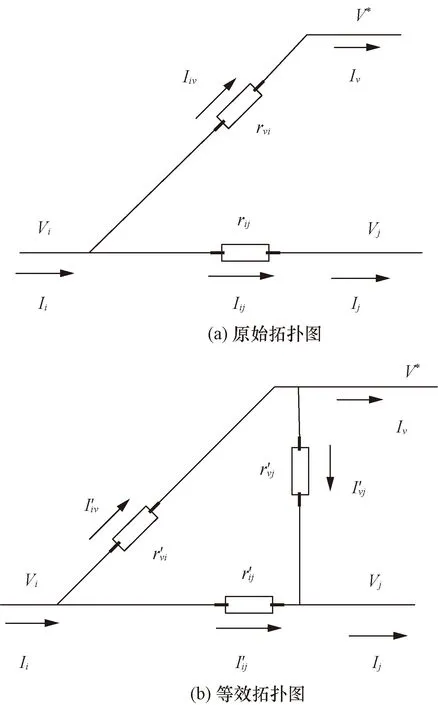
圖3 第三類節點Fig.3 The third type of node
(9)
如此,便將第三類節點化歸為第二類節點。
需要說明的是,在處理的過程中缺少一個元r′vj,但r′vj對最終結果不產生任何影響,只是一個過程值,因此可以設定一個值來簡化運算。
2 P-V下垂控制策略及參數的求取法
2.1 P-V下垂控制策略在VSC中的應用
目前廣泛使用的控制回路主要有矢量電流控制(vector current control, VCC),虛擬同步機控制(virtual synchronous generator control,VSG)兩種。直流微電網下垂控制的普遍實現方式是:將下垂曲線控制加在變換器的電壓電流雙閉環控制之外,作為控制外環,得到變換器輸出直流電壓參考值[1]。
根據相應的公式求得下垂系數之后,將其添加進外環控制回路中,將功率-電壓(P-V)下垂曲線的控制和外環控制相結合,得到參考電流的d軸分量,并通過后續的內環控制完成對整個系統的控制。其中下垂控制的原理如圖4所示。
如圖4所示的VSC(voltage source converter)控制中的外環控制,參數Vref、Pref分別是直流側電壓和功率的參考值,V、P是變換器直流側的實際輸出電壓及功率。

圖4 P-V下垂系數的應用Fig.4 Application of P-V droop coefficient
2.2 下垂系數的求取
經過以上的處理,將系統等效為簡單的放射式拓撲網絡,并將等效模型給出,進行P-V下垂參數的求取。如圖5所示為直流系統當前狀態和目標狀態的等效模型。
由圖5可知有以下關系:
(10)
同時,傳統I-V下垂和P-V下垂的表達式分別為
Iref-I=Kc(Vref-V)
(11)

V0、V*分別為變換器電壓、虛擬母線電壓;r為變換器的虛擬電阻;rc為當前狀態的虛擬線路電阻;r0為額定狀態的虛擬線路阻抗;V、I為當前狀態的變換器輸出電壓、電流;Vref、Iref為額定狀態 的變換器輸出電壓、電流圖5 變換器當前狀態和目標狀態的等效模型Fig.5 Equivalent model of the current state and target state of the converter
Pref-P=Kv(Vref-V)
(12)
式中:Kc、Kv分別為傳統下垂系數和P-V下垂系數。
在式(11)兩端各乘一個V0,并改寫為

(13)
易知有如下關系:
(14)
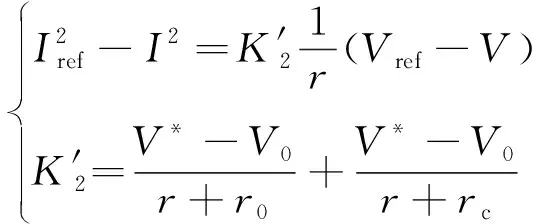
綜上所述,將公式進行整理后,可知下垂系數Kv計算公式為
(15)
該下垂系數的求取公式及控制方法適用于復雜度不高的中小型電力網絡,及電壓等級35 kV以下的中低壓配電網。
3 仿真驗證
在MATLAB/Simulink環境中搭建了4端仿真系統,其拓撲圖如圖6所示,參數值如表1所示。
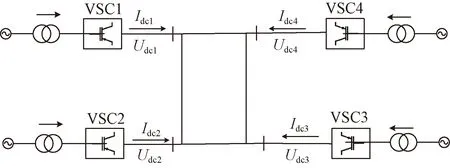
圖6 4端環形直流系統Fig.6 4-terminal ring DC system
其中VSC1在開始時采用固定功率控制,后轉為下垂控制;VSC2在開始時采用固定電壓控制,后轉為下垂控制;VSC3采用固定電壓控制;微源4采用V-f控制,同時作為擾動源,在1.2~1.7 s產生一個大小為450 kW的功率階躍。
節點1和節點2在系統穩定后,將控制方式轉變為傳統下垂控制和基于虛擬阻抗的P-V下垂控制,其中后者在之后簡寫為P-V下垂控制。為了對比控制效果,各換流站采用不同的初始控制方式,具體的控制方式及參考值見表1。
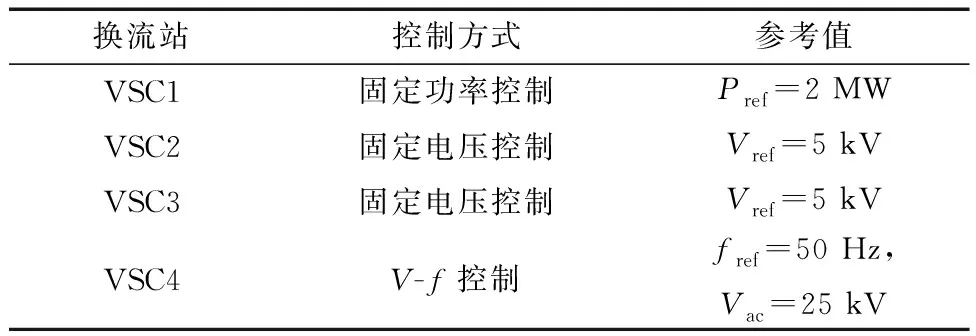
表1 換流站初始控制方式Table 1 Initial control mode of converter station
根據仿真可知,4個節點的入網電壓依次分別為4.943、4.982、4.996、4.896 kV,根據式(1)得虛擬母線電壓約為4 958.375 V。由此可知,在節點1與節點2及節點3與節點4的支路上存在虛擬節點,故4個節點均屬于第2類節點。仿真中各項系統參數詳情見表2。傳統下垂控制與本文所提出的P-V下垂控制的電壓變化如圖7所示。
由圖7可知,兩種下垂控制在擾動發生時,對自身節點均產生了不同程度的控制效果。發生擾動時節點1的電壓的擾動幅度控制效果很好,P-V下垂為83 V,相比傳統下垂的127 V較小,同時在擾動結束后的電壓恢復時間上,前者為0.12 s,相較后者的0.16 s小。節點2的初始控制采用與節點1不同的固定電壓控制,在轉變為下垂控制后,控制效果也略有不同,在幅值上的表現也優于節點1,但時間控制上無明顯區別。節點2的擾動幅值和恢復時間,傳統下垂控制是85 V和0.16 s;P-V下垂控制為44 V和0.15 s。可見,在電壓控制上,P-V下垂控制相較傳統下垂控制在控制性能對比上略有優勢。
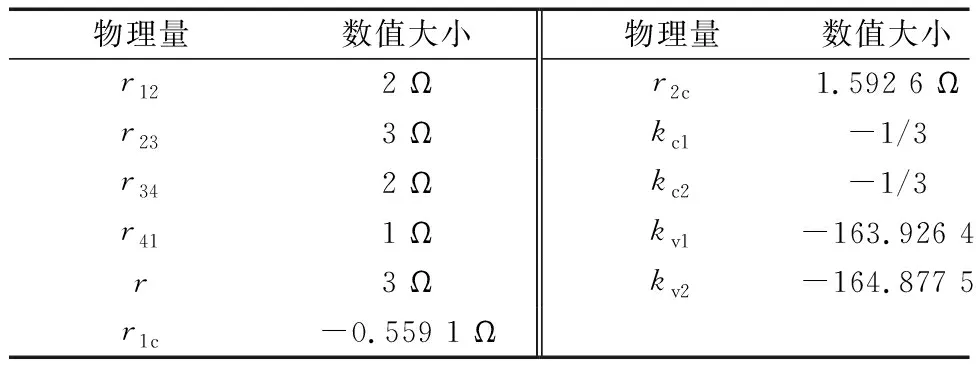
表2 仿真系統各項數值Table 2 The values of the simulation system
傳統下垂控制與本文所提出的P-V下垂控制的功率變化如圖8所示,控制性能對比情況如表3所示。
由圖8所示可知,兩種控制方式在功率控制性能的對比上較為相近,但仍有區別。在擾動發生時,節點1的兩種控制方式的功率變動非常接近,幅值都為0.17 MW,且恢復時間都為0.15 s。節點2的情況也較為接近,傳統下垂的擾動幅值為0.06 MW,恢復時間為0.16 s;P-V下垂的兩項數值為0.05 MW及0.14 s。
綜上所述,在負荷側發生大規模功率擾動時,基于復雜網絡等效基礎上的兩種控制方法均產生了不錯的控制效果。但在電壓偏移幅值、電壓恢復時間、功率波動幅值、功率恢復時間等控制性能的對比上P-V下垂控制要略優于傳統下垂控制。該仿真結果也從正面驗證了復雜網絡的等效方法的可行性,及基于其推導出的P-V下垂控制的有效性。
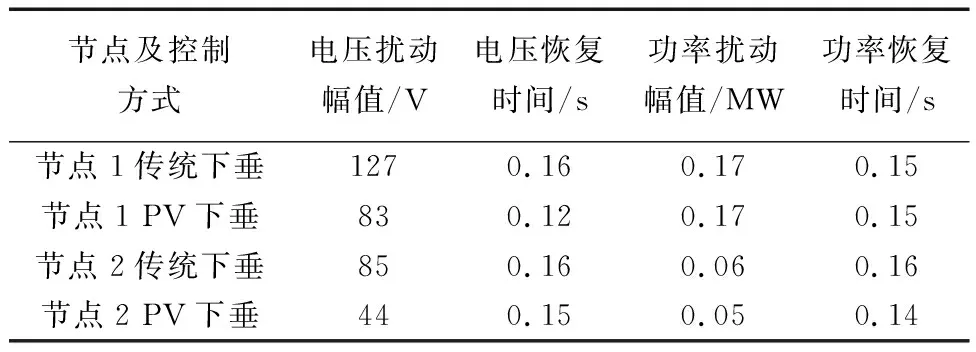
表3 控制性能對比情況Table 3 Control performance comparison situation
4 結論
本文設計了一種復雜電網的等效方法,并基于其等效結果提出一種基于虛擬電阻的P-V下垂控制方法。通過對負荷側大規模功率擾動的仿真結果研究,得出如下結論。
(1)在直流電壓偏差、功率波動幅值等幅值控制的性能對比上,虛擬阻抗P-V下垂控制具有很好的效果,能有效抑制負載變化導致的電壓偏移及功率波動。
(2)在電壓恢復速度、功率恢復速度等恢復速度控制的性能對比上,虛擬阻抗P-V控制對比傳統下垂控制并無明顯優勢,但在部分情景下恢復速度較快。
(3)本方法不需要電流測量環節,減少了部分電流傳感器的數量,經濟上也具有一定的優勢。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
