基于圖像、氣味識別相融合的掃地機器人控制策略
2023-12-08 12:31:58孫霖
電子制作 2023年22期
孫霖
(中國石油大學(華東),山東青島,266580)
0 引言
掃地機器人,又稱自動打掃機、地寶等,是一種智能化家用電器。近年來,業(yè)界在對掃地機器人的研究主要聚焦于避障、自清潔等領域[1],然而,對于養(yǎng)寵物的家庭,經(jīng)常會遇到寵物在家里的地板上排放糞便的情況,若掃地機器人不能正確識別糞便而將其作為常規(guī)污染物,采用常規(guī)的模式對地板進行清理,極有可能會把糞便擴散的滿屋子都是。現(xiàn)有的糞便識別方法常用兩種,一種是通過圖像識別,先將不同形狀糞便照片提供給掃地機器人,結合使用環(huán)境中掃地機器人拍攝的圖片對糞便進行識別;另一種是通過氣味識別,如公開號為(CN108991993A)的中國發(fā)明專利通過周圍空氣中氨氣、硫化氫等氣體濃度用于對動物糞便進行識別[2],然而,上述方案存在以下幾個問題:僅通過氣體或僅通過圖像對糞便的識別,識別準確度不高;異味氣體受風向影響較大,當糞便位于掃地機器人的下風口時有可能識別不出。
針對以上問題,本文采取的基于圖像、氣味識別相融合的掃地機器人控制策略可以將寵物糞便識別準確率提高到95%以上。
1 硬件系統(tǒng)設計方案
本文設計的掃地機器人控制系統(tǒng),如圖1 所示,由電源模塊,處理器,光線強度傳感器,攝像頭,氣體傳感器,糞便清理模塊等組成。
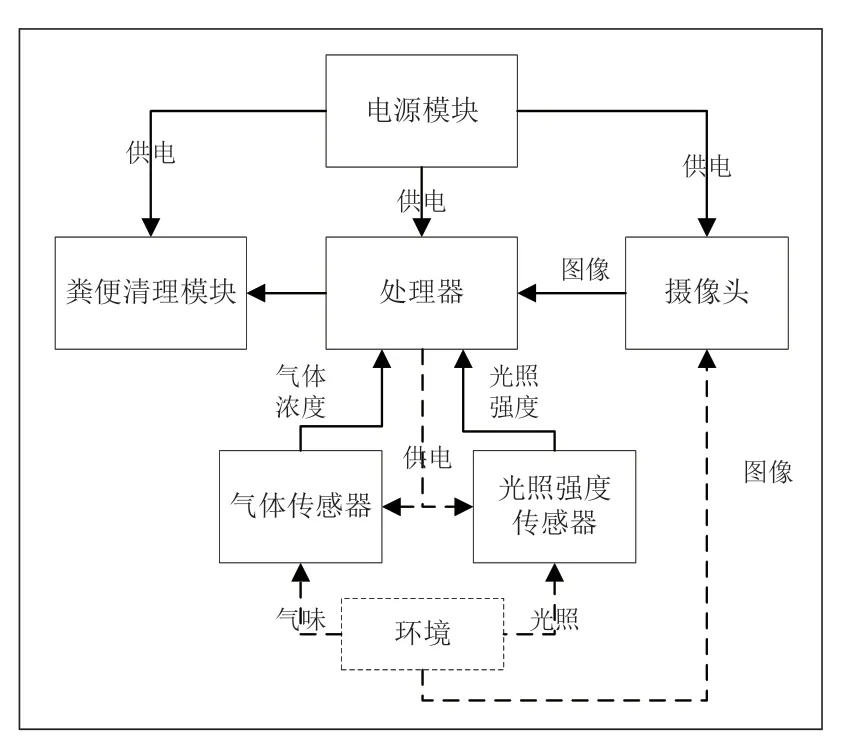
圖1 掃地機器人電路連接圖
■1.1 光線強度傳感器
光線強度傳感器型號為BH1750,集成在掃地機器人的側邊,用于感知行進路線內(nèi)的光照強度,并將結果發(fā)送給處理器。該傳感器是一種用于兩線式串行總線接口的數(shù)字型光強度傳感器,可方便集成于其他結構部件中,同時,其內(nèi)部由光敏二極管、運算放大器、ADC 采集、晶振等組成,對應廣泛的輸入光范圍,光強檢測的準確率高。
■1.2 處理器
核心處理器芯片為SMT32F103C8T6,該芯片配有ARM Cortex-M3 32 位微控制器,48 路LQFP 封裝.它結合了高性能的RISC 內(nèi)核,運行頻率可達72MHz。處理器接收光線強度傳感器、攝像頭、氣體傳感器信號,實現(xiàn)圖像識別模塊、氣體識別模塊和判斷模塊三個模塊功能,圖像識別模塊用于通過圖像判斷掃地機器人的行進路線前方是否存在寵物糞便;氣體識別模塊[4],用于根據(jù)氣體傳感器模塊采集的氣體含量識別是否存在寵物糞便;判斷模塊,用于判斷圖像識別模塊與氣體識別模塊輸出的結果是否相同,用于對光線強度傳感器采集的光線強度與預設閾值比較。
■1.3 攝像頭
攝像頭的型號為KS861-60,集成于掃地機器人的側邊,且距地高度和角度可靈活調(diào)節(jié),優(yōu)先選擇為廣角的攝像頭,以方便采集行進路線前方的圖像[5],并傳輸給處理器。
■1.4 氣體傳感器
氣體傳感器包括氨氣傳感器、硫化氫傳感器和甲烷傳感器,用于采集環(huán)境中的氣體信息,并將結果傳輸給處理器,氨氣傳感器選用MQ137 產(chǎn)品,MQ137 氣體傳感器所使用的氣敏材料是電導率較低的二氧化錫,靈敏度高,壽命長,采用簡單的電路即可將電導率的變化轉換為與該氣體濃度。
■1.5 糞便清理模塊
糞便清理模塊為強力吸塵裝置,在檢測到寵物糞便時,首先通過強力吸塵裝置將寵物糞便吸進掃地機器人中單獨的糞便儲存袋中,不與灰塵袋混用,同時,處理器控制清水桶將水灑在清洗刷具上清洗,并將污水聚攏收集到污水箱,可將寵物糞便完全清理干凈。
2 軟件系統(tǒng)設計方案
基于圖像、氣味識別相融合的掃地機器人控制策略流程如圖2 所示。
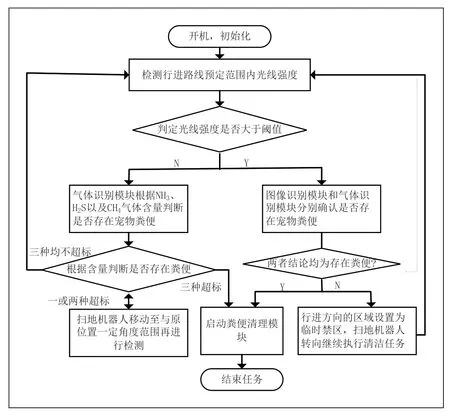
圖2 掃地機器人控制策略流程圖
掃地機器人在工作狀態(tài)時,會處于動態(tài)環(huán)境中,環(huán)境參數(shù)會隨時變化,因此,首先檢測掃地機器人所處環(huán)境中的光線強度,根據(jù)環(huán)境光線強度的不同,采取不同的控制策略,具體包括以下步驟:
步驟1:控制掃地機器人的光線強度傳感器檢測行進路線預定范圍內(nèi)的光線強度,并將檢測結果發(fā)送給處理器。
步驟2:處理器將收到的光線強度值與預設閾值比較;若大于等于預設閾值,則進入步驟3,采用強光照強度處理策略;若小于預設閾值則進入步驟5,采用弱光照強度處理策略。
掃地機器人在工作過程中,會處于動態(tài)環(huán)境中,有時候需要在桌子、沙發(fā)等家具的下面執(zhí)行清理任務,有時候需要去衛(wèi)生間執(zhí)行清理任務,處于不同的位置掃地機器人的環(huán)境參數(shù)變化較大,因此,本文設置了判斷光線強度的步驟,根據(jù)不同的光線強度控制執(zhí)行不同的寵物糞便識別流程。
步驟3:如圖3 所示,為強光線環(huán)境下控制策略流程圖。攝像頭采集掃地機器人行進路線前方的圖像,傳輸給圖像識別模塊,其儲存有卷積神經(jīng)網(wǎng)絡(Convolution Neural Network,CNN)的圖像識別模型,可用于識別圖像中是否具有寵物糞便[6~7];氣體傳感器采集環(huán)境中的氣體信息,當任一個傳感器采集的氣體含量大于對應的預設的氣體含量閾值,則氣體識別模塊就輸出存在寵物糞便的結果。然后進入步驟3。
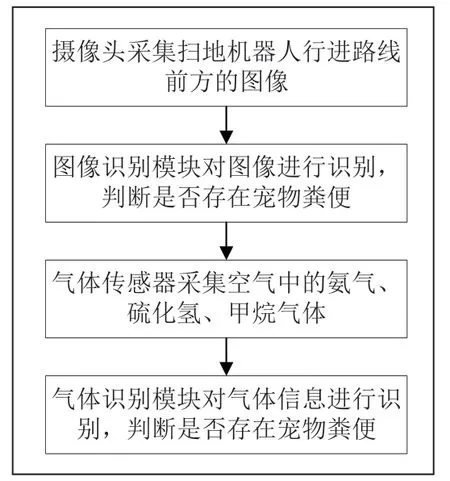
圖3 強光線環(huán)境下控制策略流程圖
當掃地機器人處于具有較高光照強度的環(huán)境中時,集成在其上的攝像頭能夠采集到清晰的圖像數(shù)據(jù),可精確地識別出行進路線的前方區(qū)域是否存在寵物糞便。
在實驗中,設置具有寵物糞便的環(huán)境與無糞便環(huán)境,然后利用氣體傳感器對環(huán)境中氣體含量進行檢測,根據(jù)檢測的各氣體含量結果設置對應氣體的預設的氣體含量閾值。
氣體識別模塊對所述氣體信息進行識別,判斷是否存在寵物糞便具體過程為:若所述氨氣傳感器、所述硫化氫傳感器、所述甲烷傳感器中任一個傳感器采集的氣體含量大于對應的預設的氣體含量閾值,則所述氣體識別模塊就輸出存在寵物糞便的結果。舉例來說,設定判定存在寵物糞便的氨氣傳感器檢測的氨氣含量閾值為a,設定判定存在寵物糞便的硫化氫傳感器檢測的硫化氫含量閾值為b,設定判定存在寵物糞便的甲烷傳感器檢測的甲烷含量閾值為c,此時,氨氣傳感器檢測的氣體含量為a1,硫化氫傳感器檢測的氣體含量為b1,甲烷傳感器檢測的氣體含量為c1,若a1 >a,b1 <b,c1 步驟4:處理器判斷圖像識別模塊輸出的結果與氣體識別模塊輸出的結果是否相同,若相同且均未存在糞便,則確認存在寵物糞便,控制糞便清理模塊清理寵物糞便,如不同,進入步驟6。 由于風向對氣體的影響以及氣體傳感器靈敏度對檢測結果存在影響等原因,設置了圖像識別結果以及氣體識別結果雙結果驗證的過程,因此,在具有圖像識別結果時,本文設置了上述三種傳感器任一個傳感器檢測出糞便氣體超標,即認定為存在寵物糞便,這樣,可大大減少圖像識別結合和氣體識別結果不同的情況,有助于最終結果的確認。 步驟5:如圖4 所示,為弱光線環(huán)境下控制策略流程圖,氣體傳感器采集空氣中的NH3、HS、CH4氣體含量;氣體識別模塊根據(jù)三種氣體含量判斷是否存在寵物糞便;若存在寵物糞便,則控制糞便清理模塊清理寵物糞便;若不存在,則掃地機器人沿預設路線前進[8],執(zhí)行步驟1;若調(diào)整方向檢測后有一種或兩種超過閾值,執(zhí)行步驟6。 圖4 弱光線環(huán)境下控制策略流程圖 氣體識別模塊判斷三種氣體含量是否均超過閾值;若均超過閾值,則輸出存在寵物糞便的結論;若均不超過閾值,則輸出不存在寵物糞便的結論;若三種氣體中有一種或兩種超過閾值,為了避免因風向對氣體傳感器模塊的影響,則機器人移動至與原始位置成一定范圍角度的位置,再進行檢測。具體移動的位置可以為一個范圍,以掃地機器人前方1m 的點為圓心,以1m 為半徑做圓周運動,移動90°~270°范圍內(nèi)的區(qū)間的點。 步驟6:將掃地機器人的行進方向的區(qū)域設置為臨時禁區(qū),掃地機器人轉向繼續(xù)執(zhí)行清潔任務。 圖像識別模塊和氣體識別模塊輸出的結果不同時,將圖像以及氣體數(shù)據(jù)傳送到用戶手機的APP 中,供用戶進行人工認定,由于這個過程需要一定時間,因此,可通過設置臨時禁區(qū)的形式,使掃地機器人暫時先不進入上述區(qū)域,待用戶確認后再行處理上述區(qū)域,以避免將寵物糞便掃到滿屋的情況。 參考CIE 國際發(fā)光照明委員會標準《室內(nèi)工作場所照明》S008/E--2001 的分級標準,將環(huán)境光線強度分別設置為5Lux,10Lux,20Lux,30Lux,50Lux,100Lux,將光照強度大于等于30 Lux 設置為強光線環(huán)境,設定判定存在寵物糞便的氣體傳感器檢測的氨氣含量閾值a 為0.3ppm,硫化氫含量閾值b 為0.2ppm,甲烷含量閾值c 為1.8 ppm,通過實驗,驗證結果如表1 所示。 表1 不同光照強度下識別策略比對 通過分析,本文提出的方法較常用的寵物糞便識別處理方法,識別正確率有大幅度提高,統(tǒng)計分析,識別正確率可達95%以上,可以極大提升用戶的使用體驗。 本文針對寵物糞便清理這一需求設計的掃地機器人控制策略,采用基于圖像和氣體識別相融合的方法,根據(jù)工作環(huán)境光線強度不同,采用不同的識別策略,強光環(huán)境采用圖像與氣體識別相結合識別,弱光環(huán)境僅采用氣體識別,寵物糞便識別的準確率可以大幅度提高。并且在通過氣體識別寵物糞便時,在僅識別出一種或兩種氣體時,考慮風向影響,掃地機器人變換位置,在不同角度進行檢測,進一步提高了氣體識別的準確率。
3 結果分析

4 結論