一種基于柔性腿部與主動腰部的仿貓四足機器人設(shè)計方法
2023-12-09 04:15:26宋玉旺李江天滕鵬吳碩張致豪孟非
科學(xué)技術(shù)與工程 2023年31期
關(guān)鍵詞:機械結(jié)構(gòu)
宋玉旺, 李江天, 滕鵬, 吳碩, 張致豪, 孟非
(1.華北電力大學(xué)能源動力與機械工程學(xué)院, 北京 102206; 2.北京郵電大學(xué)計算機學(xué)院, 北京 100876; 3.北京理工大學(xué)機電學(xué)院, 北京 100081)
在移動機器人的領(lǐng)域中,基于仿生學(xué)設(shè)計的足式機器人相比傳統(tǒng)輪式機器人有著獨特的優(yōu)勢,已經(jīng)成為了國內(nèi)外學(xué)者研究的主要方向。其中,由波士頓動力LittleDog領(lǐng)銜的兼具小體積、輕量化和高機動性的四足機器人更是學(xué)界備受關(guān)注的研究方向[1]。
在自然界的種種陸生動物中,四足動物在地形環(huán)境適應(yīng)性和運動靈活性方面優(yōu)勢明顯[2]。目前四足機器人大多以剛性結(jié)構(gòu)設(shè)計而成,因此難以實現(xiàn)高效的跳高、越障和軟著陸等同時需要較強驅(qū)動力和靈活性的動作[3]。在四足動物中,貓憑借其優(yōu)異的腰腿部靈活性和肌肉爆發(fā)力,擁有著極強的運動能力[4-5]。部分研究人員從仿生腿部和仿生腰部方面開展了機器人的設(shè)計研究工作。
仿貓腿設(shè)計的仿生腿部機械結(jié)構(gòu)研究起步較早。早在20世紀(jì)80年代,Raibert等[6]研究了可變阻尼的柔性腿部結(jié)構(gòu)在四足機器人中的應(yīng)用可行性和其平衡性控制。Kinsey等[7]研究的StarlETH利用20根彈簧模擬了生物肌肉和肌腱等結(jié)構(gòu)在緩沖和儲能方面的特性。Hiasa等[8]設(shè)計的小型四足機器人的腿部結(jié)構(gòu)也是受到了貓的雙關(guān)節(jié)肌腱復(fù)合體的啟發(fā)。同時也出現(xiàn)了針對仿生機器人腿部關(guān)節(jié)柔順性對其動力學(xué)影響的相關(guān)研究成果[9]。
近年來,中國眾多高等院校和研究所也在柔性腿部結(jié)構(gòu)進(jìn)行了深入研究,如Dong等[10]基于彈性流體制動器研究設(shè)計的多自由度腿部結(jié)構(gòu),史延雷等[11]針對各類腿部結(jié)構(gòu)設(shè)計的分析,Huang等[12]設(shè)計的四足機器人三維柔性腿部結(jié)構(gòu),趙江波等[13]研究的可保證四足機器人柔性觸地的腿部控制方法和胡永贊等[14]針對剛?cè)狁詈纤木錂C器人運動仿真的研究。可見柔性腿部在四足機器人領(lǐng)域是一個重點研究方向且國內(nèi)外已有著較多研究成果,不過現(xiàn)有的研究在兼顧輕量化和高效的腿部結(jié)構(gòu)設(shè)計方面仍有不足,不能很好地將柔性腿部設(shè)計投入實際應(yīng)用中。
仿生腰部的研究也是四足機器人研究領(lǐng)域的一個熱點,離散式脊柱設(shè)計在四足機器人中已經(jīng)應(yīng)用多年。Park等[15]根據(jù)其研究的具有2自由度腰部關(guān)節(jié)的ELIRO-Ⅱ,實驗證明了引入腰部結(jié)構(gòu)的四足機器人相比傳統(tǒng)剛性軀干的四足機器人有著更穩(wěn)定的運動效果;同時,靈活的腰部扭動可以提升機器人可到達(dá)的區(qū)域。而后,Khoramshahi 等[16]設(shè)計的Bobcat用一個電機驅(qū)動的單自由度關(guān)節(jié)連接前后軀干,結(jié)合具有一定緩震能力的腿部結(jié)構(gòu),通過實驗提出了脊柱的平行柔順方法,降低了機器人運動過程中不必要的能量消耗。邢福澤[17]對柔性脊柱關(guān)節(jié)在四足機器人中的設(shè)計與控制展開了深入研究。但是目前的四足機器人腰部結(jié)構(gòu)大多采用都是單關(guān)節(jié)設(shè)計,只能實現(xiàn)單方向的運動,運動范圍受限,未能有效結(jié)合柔性腿部設(shè)計,不能滿足動態(tài)要求。
針對目前常見的腿和腰結(jié)構(gòu)仍然無法滿足動態(tài)運行需求,參照貓的腿部骨骼結(jié)構(gòu)和柔性組織,提出一種具有柔性腿部和主動腰部的仿貓四足機器人設(shè)計方法。首先,提出柔性腿部設(shè)計方法,通過彈簧阻尼器系統(tǒng)和拉簧絞盤系統(tǒng)的組合設(shè)計,模擬出貓的腿部骨骼肌肉和柔性組織特征,達(dá)到腿部肌肉和韌帶在運動時的緩震儲能效果,實現(xiàn)較強的機構(gòu)運動能力。其次,提出主動腰部設(shè)計方法,利用萬向節(jié)和魚眼拉桿等機構(gòu)形式,在前后軀干之間設(shè)計轉(zhuǎn)動靈活、控制簡單的兩舵機驅(qū)動的并聯(lián)腰結(jié)構(gòu),同時利用拖頭萬向節(jié)和尼龍?zhí)淄苍O(shè)計過定位穩(wěn)定結(jié)構(gòu),實現(xiàn)腰部結(jié)構(gòu)扭動時較強的運動穩(wěn)定性。最后,利用三維運動仿真軟件和實物原型機,通過步態(tài)行進(jìn)、跳躍、摔落和越障等動作的對比試驗,驗證該仿貓機器人較強的運動靈活性、協(xié)調(diào)性和穩(wěn)定性。
1 仿貓柔性緩震腿的設(shè)計
四足機器人的腿型和關(guān)節(jié)布置會直接影響機器人的運動性能,大多數(shù)四足機器人采用易于設(shè)計和控制的全肘式。而在自然界中,四足動物的腿部結(jié)構(gòu)更近似于內(nèi)膝肘式,圖1展示了貓的主要骨骼肌肉。也有相關(guān)研究表明:從機器人配置對性能的敏感度考慮,內(nèi)膝肘式對髖關(guān)節(jié)和膝關(guān)節(jié)幅值變化敏感度更低,運動穩(wěn)定性更好[18]。因此,本研究充分參考貓腿的骨骼肌肉特征,結(jié)合傳統(tǒng)剛性四足機器人常用的腿部結(jié)構(gòu),進(jìn)行結(jié)構(gòu)不同的仿貓前后腿設(shè)計。
1.1 后腿結(jié)構(gòu)設(shè)計
經(jīng)過對貓的腿部結(jié)構(gòu)的仿生學(xué)研究,機械貓的后腿腿部結(jié)構(gòu)仿照貓的后腿部骨骼肌肉結(jié)構(gòu)特點:由腓骨、股骨、脛骨與中骨互相連接構(gòu)成類似平行四邊形的四連桿機構(gòu)。通過進(jìn)一步的仿生學(xué)研究、理論分析和實物測試,不斷進(jìn)行調(diào)整優(yōu)化,最終機械貓后腿腿部結(jié)構(gòu)如圖2所示。其中,后腿大腿側(cè)板對應(yīng)圖1中A處的股骨,后腿腿部連桿對應(yīng)圖1中D處的脛骨,后腿大腿拉簧系統(tǒng)對應(yīng)圖1中F處的股二頭肌,小腿拉簧系統(tǒng)對應(yīng)圖1中G處的腓腸肌。該機械貓后腿髖關(guān)節(jié)運動范圍為0°~180°,膝關(guān)節(jié)運動范圍為44°~105°。此外,機械貓采用分離式尼龍塊與小腿側(cè)板組合作為足端,進(jìn)一步提高了落地緩沖效果。
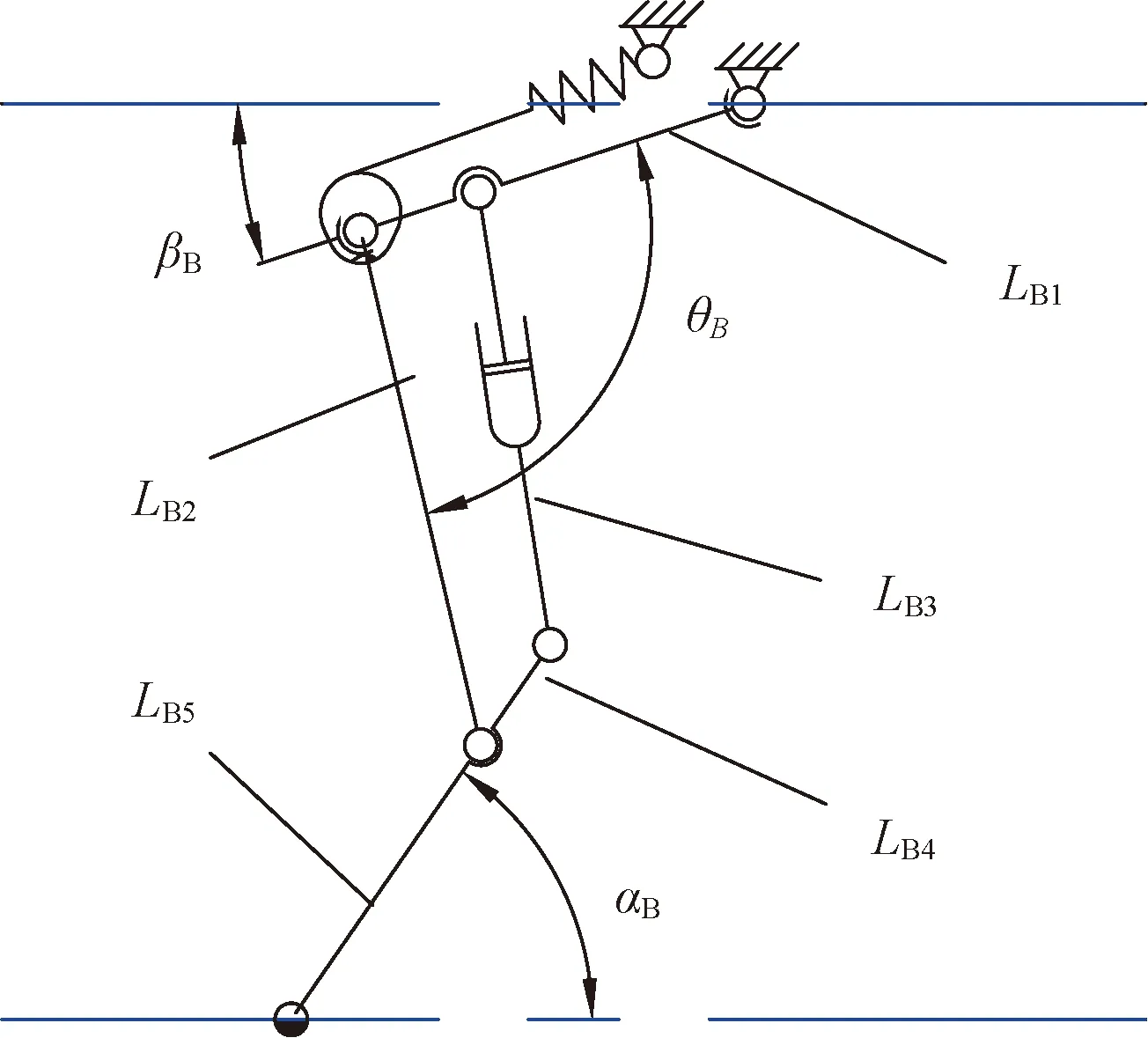
LB1為后腿髖關(guān)節(jié)與膝關(guān)節(jié)舵機間距;LB2為后腿膝關(guān)節(jié)舵機到小腿側(cè)板與腿部連桿的連接點的距離;LB3為后腿阻尼器長度;LB4為后腿阻尼器、腿部連桿與小腿側(cè)板連接點距離;LB5為后腿腿部連桿與小腿側(cè)板連接點到足端橡膠中心距離;αB為后腿小腿側(cè)板與地面夾角; βB為后腿大腿側(cè)板與后軀干夾角;θB為后腿大腿側(cè)板與腿部連 桿夾角

圖2 后腿機構(gòu)運動簡圖、三維模型與物理樣機Fig.2 Skeleton of mechanism, 3D model and physical prototype of the hind legs
該機械貓后腿主要由舵機及其支架、阻尼器、拉簧系統(tǒng)及其固定絞盤和其余剛性結(jié)構(gòu)部件組成。
除基礎(chǔ)的行走功能外,該機械貓后腿柔性關(guān)節(jié)結(jié)構(gòu)在跳躍起跳與落地過程中起到類似貓腓腸肌的功能,阻尼器通過壓縮將落地剛性沖擊轉(zhuǎn)化為柔性沖擊并吸收部分沖擊,拉簧系統(tǒng)通過拉伸在起跳時提供拉力使后腿收縮更快速,提高起跳時加速度從而提高機械貓?zhí)S高度與距離。
1.2 后腿結(jié)構(gòu)力學(xué)分析
機械貓整體受力情況如圖3所示。
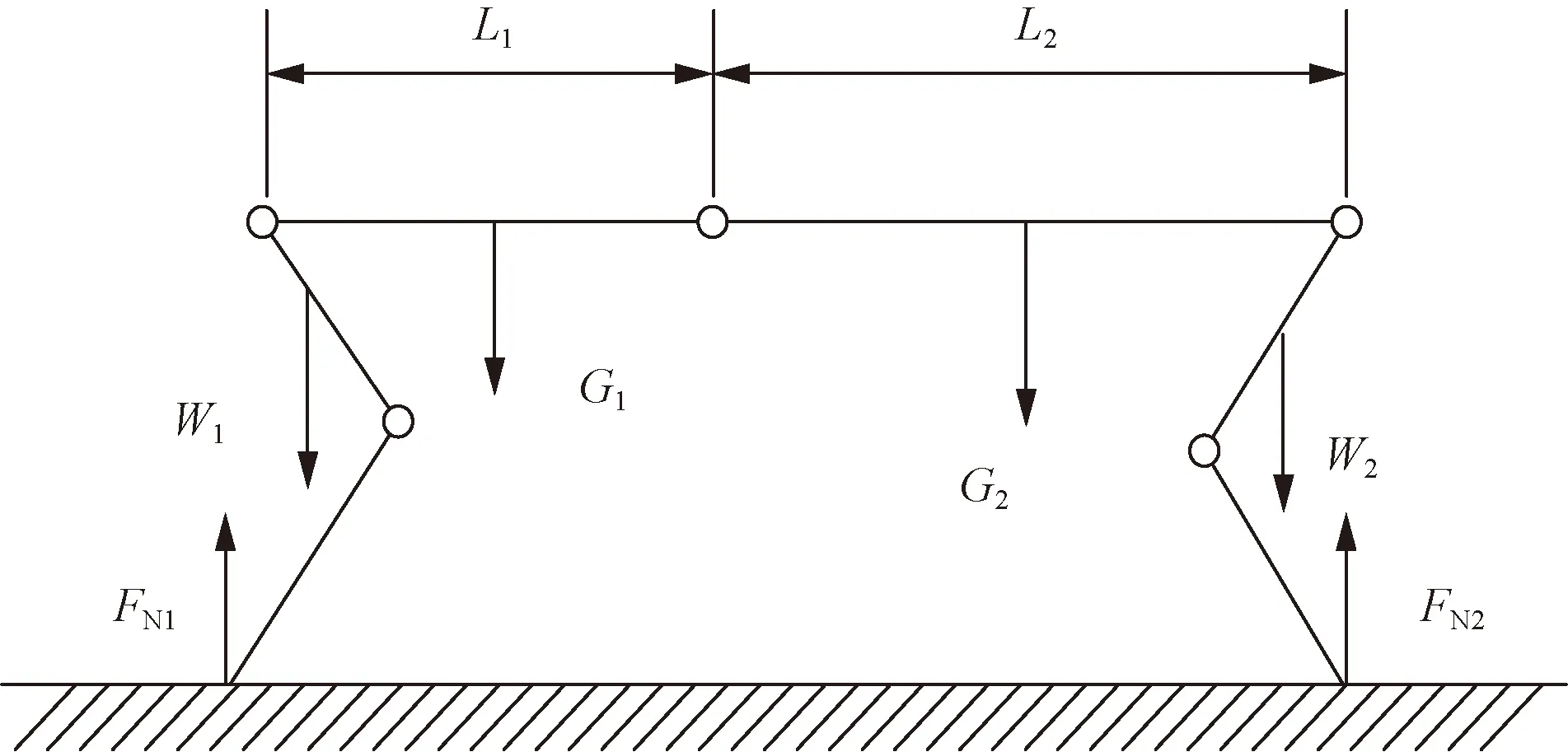
G1為前軀干重;L1為長度;G2為后軀干重;L2為長度;W1為前腿自重; FN1為受地面支持力;W2為后腿自重;FN2為受地面支持力圖3 機械貓整體受力情況Fig.3 Overall force of mechanical cat
根據(jù)圖2(a)后腿機構(gòu)運動簡圖,以髖關(guān)節(jié)舵機為原點建立x-z坐標(biāo)系,進(jìn)而可得后腿腿部連桿受力與后腿阻尼器所受力分別為TB1與TB2。其計算公式為
(1)
(2)
通過后腿腿部連桿受力與后腿阻尼器受力情況為后腿腿部連桿與阻尼器選用了合適的材料與阻尼系數(shù)。
進(jìn)一步可得到后腿膝關(guān)節(jié)舵機扭矩MB1,髖關(guān)節(jié)舵機扭矩MB2。其計算公式為
MB1=FN2[LB5cosαB-LB2cos(θB-βB)]+
(3)
MB2=FN2[LB1cosβB-LB2cos(θB-βB)+

(4)
由所求的舵機轉(zhuǎn)矩關(guān)系,對機械貓腿部結(jié)構(gòu)進(jìn)行優(yōu)化,減小舵機所受力矩并提高結(jié)構(gòu)強度與運動穩(wěn)定性。
該機械貓后腿在起跳前緩慢蜷曲,使彈簧受力壓縮并儲存能量;在起跳瞬間機械貓后腿快速的完全伸展,彈簧伸長釋放的能量與后腿舵機轉(zhuǎn)動帶來的力矩給機械貓一個較大的加速度;在落地前的滯空狀態(tài),機械貓后腿再適當(dāng)蜷縮并調(diào)整后腿姿態(tài),使落地時的沖擊對后腿影響最小。
1.3 前腿結(jié)構(gòu)設(shè)計
機械貓前腿設(shè)計與后腿相應(yīng)的參照了貓的前腿骨骼肌肉特點:由尺骨、肱骨、橈骨與中骨互相連接構(gòu)成類似平行四邊形的四連桿機構(gòu)。通過進(jìn)一步的仿生學(xué)研究、理論分析和實物測試,不斷進(jìn)行調(diào)整優(yōu)化,最終機械貓前腿腿部結(jié)構(gòu)如圖4中前腿實物所示。其中,前腿大腿側(cè)板對應(yīng)圖1中B處的肱骨,前腿腿部連桿對應(yīng)圖1中C處的橈骨,前腿大腿拉簧系統(tǒng)對應(yīng)圖1中E處的肱三頭肌。該機械貓前腿髖關(guān)節(jié)運動范圍為0°~180°,膝關(guān)節(jié)運動范圍為57°~150°。
考慮到貓實際的前腿骨骼結(jié)構(gòu)與后腿骨骼結(jié)構(gòu)的差異,在進(jìn)一步仿生學(xué)研究的基礎(chǔ)上,機械貓的前腿安裝在后腿安裝的基礎(chǔ)上反裝,使機械貓前后腿部如貓一樣腿部膝關(guān)節(jié)相對,并優(yōu)化調(diào)整了機械貓前腿腿部各結(jié)構(gòu)參數(shù)。
此外,本文優(yōu)化了機械貓著陸方式,機械貓前腿小腿側(cè)板由直側(cè)板修改為V字形側(cè)板,提高前腿足端可達(dá)范圍,使前腿在落地時先著地,減小落地時沖擊對機械貓整體影響。
1.4 前腿結(jié)構(gòu)力學(xué)分析
根據(jù)圖4(a)前腿機構(gòu)運動簡圖,以髖關(guān)節(jié)舵機為原點建立x-z坐標(biāo)系,進(jìn)而可得前腿腿部連桿受力與前腿阻尼器所受力分別為TF1與TF2。其計算公式為

LF4sinθF
(6)
通過前腿腿部連桿受力與前腿阻尼器受力情況為前腿腿部連桿與阻尼器選用合適的長度比例與材料,使機械貓前腿落地時有著更好的緩沖效果。
進(jìn)一步可得到前腿膝關(guān)節(jié)舵機扭矩MF1,髖關(guān)節(jié)舵機扭矩MF2。其計算公式為
MF1=FN1[LF2cos(θF-βF)+LF5cosθF]+
(7)
MF2=FN1[LF5cosαF-LF1cosβF+
(8)
由所求的舵機轉(zhuǎn)矩關(guān)系,對機械貓腿部結(jié)構(gòu)進(jìn)行優(yōu)化,調(diào)整機械貓落地時前腿姿態(tài),使前腿最先著地,使落地緩沖能力進(jìn)一步提高。
該機械貓前腿在起跳前緩慢蜷曲,使壓簧受力壓縮并儲存能量;在起跳瞬間快速的向前伸展,使機械貓前腿足端可達(dá)距離提升,提高跳躍距離;在落地前的滯空狀態(tài),前腿將受控適當(dāng)蜷曲并調(diào)整前腿姿態(tài),確保落地時前腿先著地并且落地時的沖擊對機械貓整體平衡性影響最小。
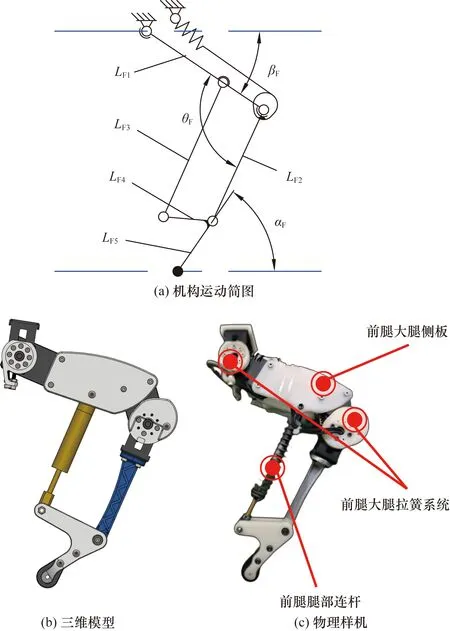
LF1為前腿髖關(guān)節(jié)與膝關(guān)節(jié)舵機間距;LF2為前腿膝關(guān)節(jié)舵機到小腿側(cè)板與腿部連桿的連接點的距離;LF3為前腿阻尼器長度;LF4為前腿阻尼器、腿部連桿與小腿側(cè)板連接點距離;LF5為前腿腿部連桿與小腿側(cè)板連接點到足端橡膠中心距離;αF為前腿小腿側(cè)板與地面夾角;βF為前 腿大腿側(cè)板與前軀干夾角;θF為前腿大腿側(cè)板與腿部連桿夾角圖4 前腿機構(gòu)運動簡圖、三維模型與物理樣機Fig.4 Skeleton of mechanism, 3D model and physical prototype of the front legs
2 軀干與腰部結(jié)構(gòu)的設(shè)計
機械貓軀干由后軀干、主動腰部、前軀干、軀干延長件、機械貓貓頭共五部分組成,如圖5所示。機械貓后腿安裝在后軀干上,機械貓前腿安裝在軀干延長件上,通過調(diào)整前后軀干長度與寬度比例,是機械貓在四足站立時的整體重心在水平面的投影位于機械貓前后腿足端對角線交點上,提機械貓平衡能力。
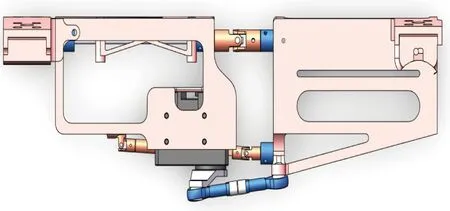
圖5 軀干與腰部結(jié)構(gòu)三維模型Fig.5 3D model of the body and waist structure
2.1 主動腰部的設(shè)計
經(jīng)過對貓的脊柱在運動過程中的動態(tài)性能的仿生學(xué)研究,機械貓的主動腰部對貓的腰部功能進(jìn)行仿生并設(shè)計了合理的腰部長度與寬度比例;通過改變前后軀干與后軀干的相對位置的方式實現(xiàn)腰部轉(zhuǎn)動。
此外,基于對貓的腰部結(jié)構(gòu)特點的仿生,主動腰部的各結(jié)構(gòu)設(shè)計了具有相近功能的結(jié)構(gòu)形狀,主動腰部中萬向節(jié)對應(yīng)貓腰部的脊椎,腰部舵機、舵機曲柄與魚眼拉桿設(shè)計對應(yīng)貓腰部的腰背肌肉。通過腰部舵機轉(zhuǎn)動改變前后軀干相對位置,從而實現(xiàn)啊俯仰角與航向角兩個自由度的轉(zhuǎn)動,最大轉(zhuǎn)角為俯仰角±23.9°,航向角±37.2°。
主動腰部由扭動機構(gòu)和過定位穩(wěn)定機構(gòu)組成。基于對貓腰部的功能仿生和相關(guān)模型結(jié)構(gòu),簡化出了如圖6所示的腰部機構(gòu)運動簡圖,該扭動機構(gòu)由腰部舵機、舵機曲柄、魚眼拉桿、軀干固定軸以及萬向節(jié)組成,軀干固定軸貫穿前后軀干并通過萬向節(jié)連接,通過控制腰部舵機轉(zhuǎn)角改變前后軀干相對位置,使前軀干以萬向節(jié)為中心相對后軀干靈活轉(zhuǎn)動,從而實現(xiàn)俯仰角與航向角兩個自由度上的自由轉(zhuǎn)動。
而過定位穩(wěn)定機構(gòu)由拖頭萬向節(jié)、萬向節(jié)與尼龍滑塊組成,在腰部扭動機構(gòu)的基礎(chǔ)上使主動腰部轉(zhuǎn)動更加穩(wěn)定。由于腰部扭動機構(gòu)中萬向節(jié)出于成本考慮,萬向節(jié)精度不夠高,使萬向節(jié)在橫滾方向上存在晃動量,該晃動量通過腰部扭動機構(gòu)的放大后在腰部下方會嚴(yán)重影響主動腰部轉(zhuǎn)動的穩(wěn)定性與精確性。通過在腰部舵機間安裝過定位穩(wěn)定機構(gòu),增加額外的約束來消除扭動機構(gòu)晃動量帶來的問題,從而使機械貓腰部轉(zhuǎn)動更加穩(wěn)定、精確。
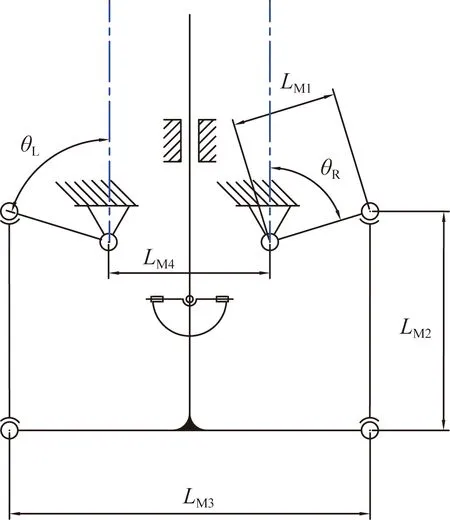
機械貓舵機曲柄的長度LM1為;魚眼拉桿長度為LM2;后軀干前端寬度為LM3;兩腰部舵機間距為LM4;舵機曲柄與左右腰部舵機向正前方 延伸的軸線所成角度分別為θL與θR圖6 腰部機構(gòu)運動簡圖Fig.6 Skeleton of mechanism of the waist structure
與傳統(tǒng)的腰部或離散式脊柱結(jié)構(gòu)相比較,該主動腰部在兼顧成本低廉的同時,結(jié)構(gòu)簡單且穩(wěn)定可靠。主動腰部的扭動機構(gòu)主要由腰部舵機、舵機曲柄與魚眼拉桿組成,相較于齒輪傳動腰部結(jié)構(gòu)簡單,零件精度要求較低且成本低廉;相比氣動或電動推桿,該主動腰部體積更小適合于小體積四足機器人,此外主動腰部的軀干固定軸與拖頭萬向節(jié)可以分?jǐn)倢ρ慷鏅C的沖擊,運動時的沖擊抗沖擊能力更好,有較好的運動穩(wěn)定能力。
2.2 主動腰部的力學(xué)分析
分析機械貓主動腰部四連桿結(jié)構(gòu)各連桿,根據(jù)圖6的腰部機構(gòu)運動簡圖,設(shè)主動腰部的航向角為θyaw,俯仰角為θpitch。通過在Matlab中對相關(guān)實驗數(shù)據(jù)線性擬合,可得到θyaw與θpitch分別與θL和θR的關(guān)系式為
θyaw=-0.270 1θL+0.270 1θR
(9)
(10)
由此可以更為精準(zhǔn)地控制主動腰部轉(zhuǎn)動到目標(biāo)位置。進(jìn)一步可得到腰部舵機所受力矩MM,計算公式為
(11)
通過求解腰部舵機所受力矩,優(yōu)化了舵機曲柄與魚眼拉桿長度比例和材料選型。該主動腰部通過穩(wěn)定高效的改變前后軀干相對位置,有效增大了足端可達(dá)空間,提升了機械貓的如越障等運動能力的上限。
3 實驗
本文設(shè)計的機械貓總體機構(gòu)設(shè)計圖如圖7(a)所示,實物圖如圖7(b)所示。為充分驗證該仿貓柔性四足機器人相比傳統(tǒng)剛性四足機器人的性能優(yōu)勢,基于第一節(jié)和第二節(jié)中設(shè)計的模型,對行進(jìn)間質(zhì)心波動和跳躍距離等參數(shù)進(jìn)行了實驗分析。

圖7 機械貓總體結(jié)構(gòu)設(shè)計圖與實物圖Fig.7 Mechanical cat overall structure design drawings and physical drawings
3.1 Trot步態(tài)行進(jìn)
首先,腰部關(guān)節(jié)在航向方向上的規(guī)律扭動可以有效提升Trot步態(tài)下的運動步長,如圖8所示。
在仿真實驗過程中,通過在Adams中分別構(gòu)建具有柔性腿部的機械貓和同等質(zhì)量的剛性腿部四足機器人,利用擺線軌跡控制仿真模型運動,得到了圖9中的質(zhì)心波動曲線、膝關(guān)節(jié)力矩曲線和足端受力曲線。
從質(zhì)心波動曲線中可以看出,采用剛性結(jié)構(gòu)的測試模型的最大質(zhì)心波動量為3.810 mm,采用柔性緩震腿的測試模型的最大質(zhì)心波動量為2.927 mm。由此可見,柔性緩震腿的設(shè)計減小了Trot步態(tài)行進(jìn)過程中的機身晃動,帶來了明顯的運動穩(wěn)定性。從膝關(guān)節(jié)力矩變化曲線和足端受力曲線可看出,柔性結(jié)構(gòu)的引入使膝關(guān)節(jié)最大力矩減小了46.06%,使足端最大受力減小了48.92%,該結(jié)果也證明了柔性緩震腿設(shè)計的有效性。
在實機驗證中,受限于3D打印件裝配精度和彈簧阻尼器剛度誤差等因素,難以理想地將重心調(diào)整到對角足端連線交點處,但依舊可以得到近似仿真實驗的結(jié)果。經(jīng)調(diào)試,最終在18 cm的單步步長下實現(xiàn)了0.4 m/s的穩(wěn)定高速行進(jìn),如圖10所示。
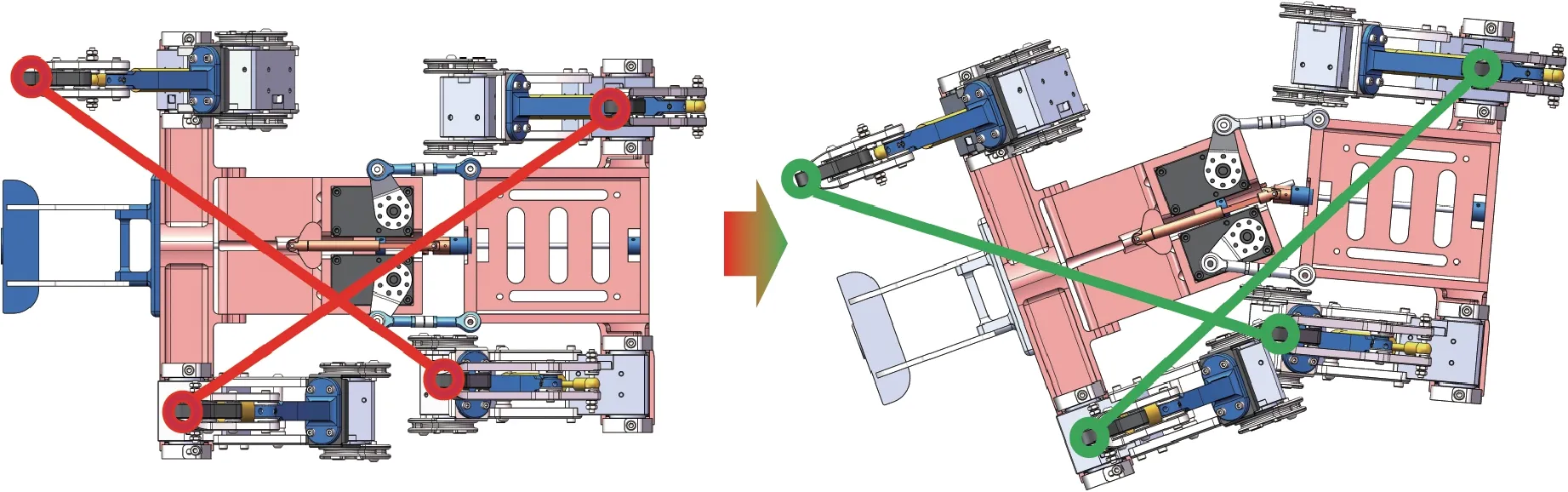
圖8 Trot步態(tài)下腰部扭動示意圖Fig.8 Schematic diagram of waist twisting with Trot gait
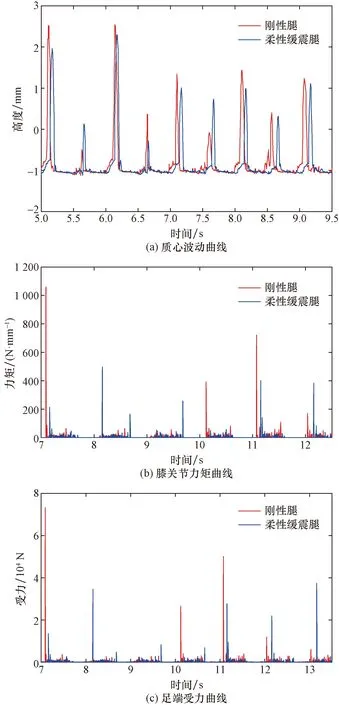
圖9 Trot步態(tài)仿真實驗結(jié)果Fig.9 Trot gait simulation experimental results
3.2 跳躍運動
經(jīng)過在慢動作鏡頭下觀察貓在跳躍過程中的姿態(tài)變化,確定了5個關(guān)鍵動作作為關(guān)鍵幀,再利用線性插幀得到最終運動軌跡,由此實現(xiàn)了跳躍動作的設(shè)計。
圖11為采用剛性結(jié)構(gòu)的測試模型和采用柔性緩震腿的測試模型的跳躍高度和跳躍距離仿真結(jié)果。從圖11中可以看出,柔性緩震腿設(shè)計帶來了10.24%的跳躍高度提升和35.28%的跳躍距離提升。
經(jīng)過圖12所示的實機驗證,選用合適剛度的拉簧和壓簧明顯減少了跳躍落地時軀干受到的沖擊。當(dāng)采用空載轉(zhuǎn)速為77 r/min和失速扭矩為3.0 N·m的Dynamixel XM430-W210舵機驅(qū)動時,可實現(xiàn)單次5 cm的跳躍高度或25 cm的跳躍距離。隨著舵機轉(zhuǎn)速的提升和扭矩的加大,跳躍效果也會有著明顯提升。

圖10 機械貓原型機Trot步態(tài)測試Fig.10 Trot gait test for mechanical cat prototype
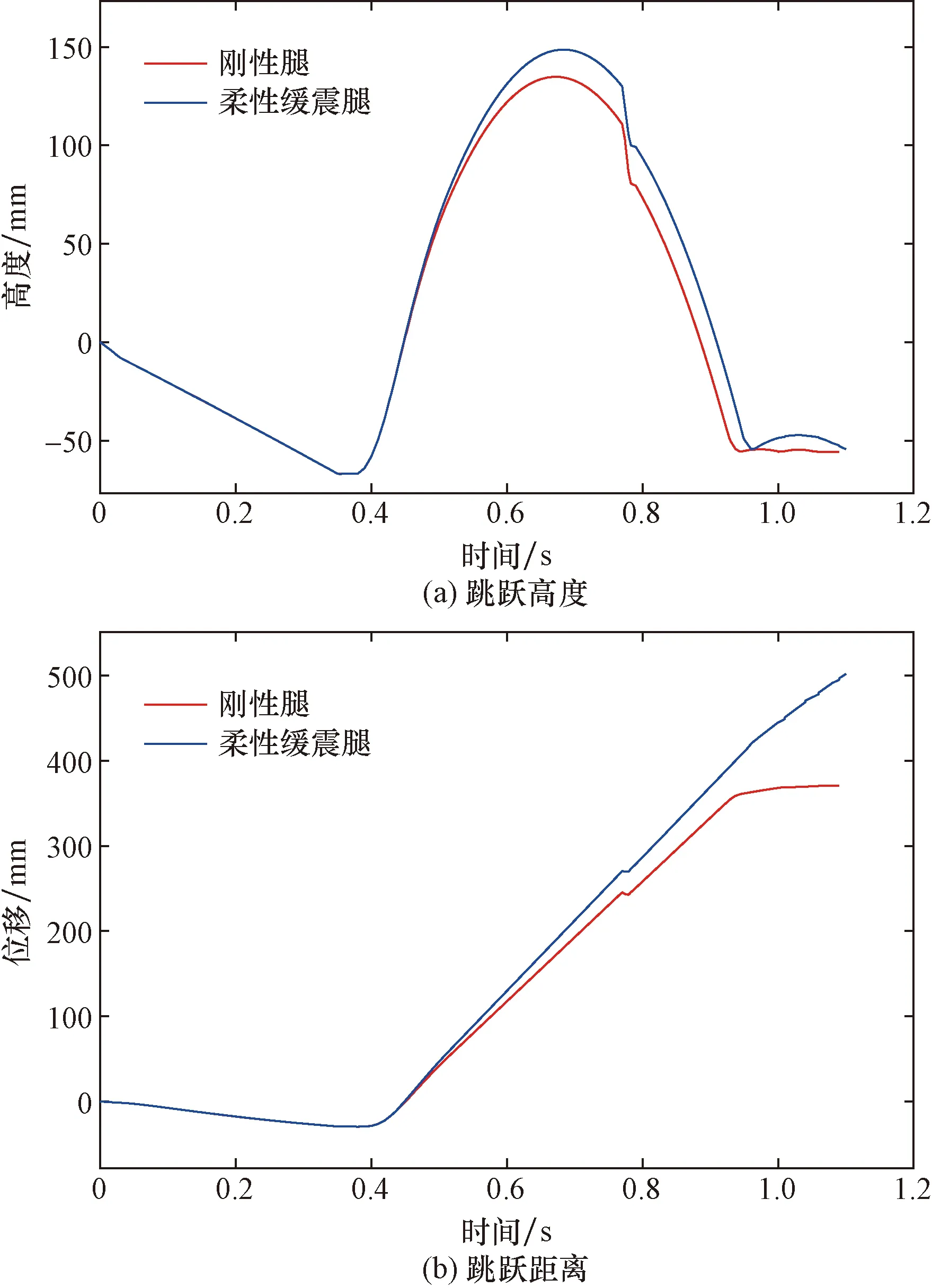
圖11 跳躍仿真實驗結(jié)果Fig.11 Jump simulation experiment results
3.3 落地緩沖
為了更直觀地展現(xiàn)柔性結(jié)構(gòu)的緩沖能力,通過將仿真模型對照組從同一高度摔落到地面,得到了圖13所示膝關(guān)節(jié)受力的數(shù)據(jù)。
通過對機械貓原型機腿部舵機增加電流環(huán)控制,最終可實現(xiàn)最高35 cm跌落不翻倒。圖14展示
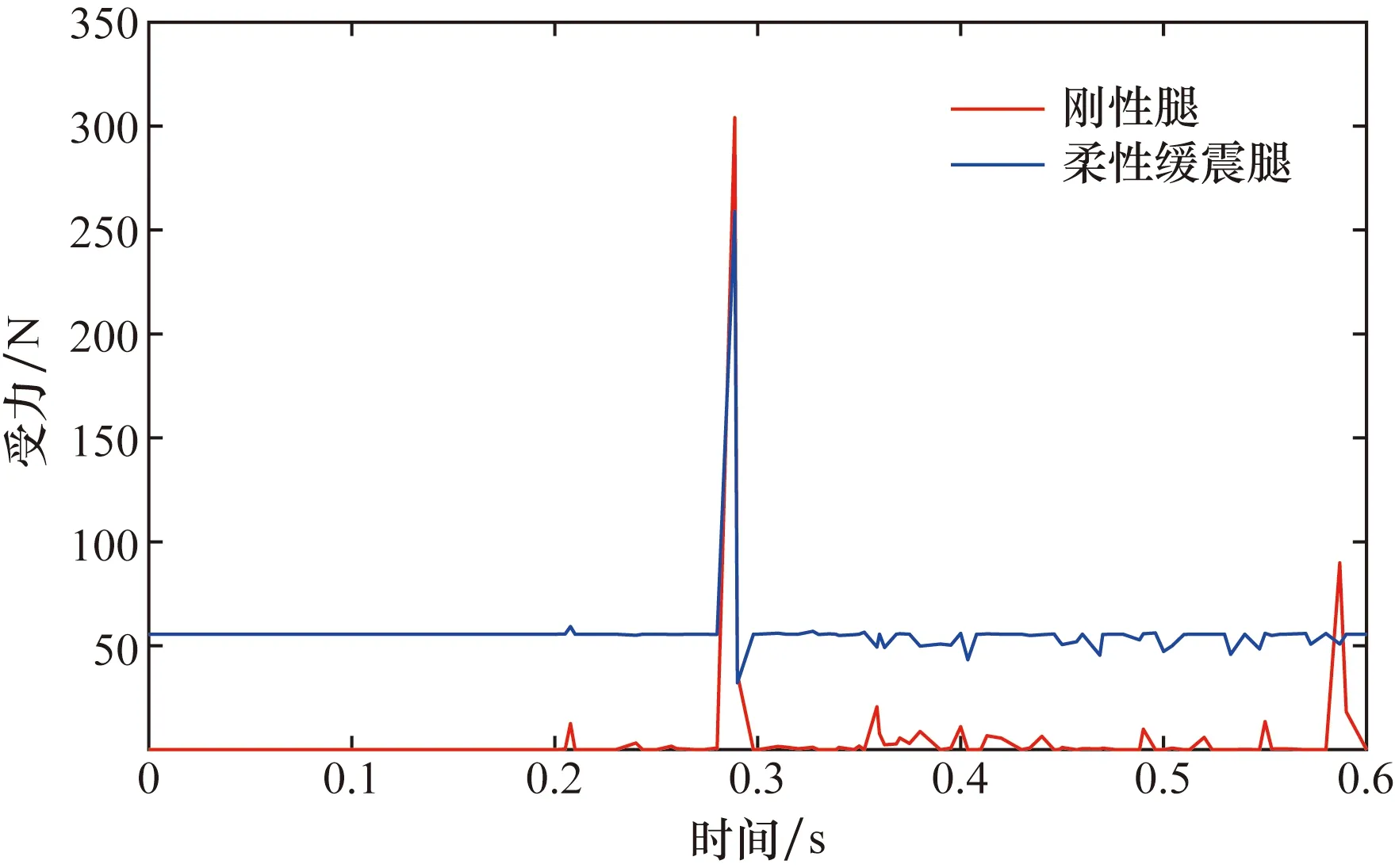
圖13 落地緩沖仿真實驗結(jié)果Fig.13 Results of simulation experiments on floor cushioning

圖14 機械貓原型機落地緩沖測試Fig.14 Mechanical cat prototype landing cushion test
了從25 cm高度水平扔下過程中機械貓各階段的姿態(tài)。
3.4 極限越障
主動腰部和前肘后膝的腿型設(shè)計帶來了優(yōu)秀的障礙物攀爬能力,使得該機械貓可以攀上大于最大步高的臺階。圖15中機械貓原型機的最大步高為10 cm,實際可攀上15 cm的障礙物,提升了50%的攀爬高度。
4 結(jié)論
(1)針對大多數(shù)四足機器人采用剛性腿部結(jié)構(gòu)和單關(guān)節(jié)腰部導(dǎo)致運動靈活性和緩震能力不足的問題,通過腿部結(jié)構(gòu)仿生和腰部功能仿生,設(shè)計了一種基于柔性腿部與主動腰部的仿貓四足機器人。
(2)得益于腿部機構(gòu)的緩震儲能特性和腰部機構(gòu)靈活穩(wěn)定的運動能力,在相同仿真實驗環(huán)境下得到了優(yōu)于傳統(tǒng)剛性結(jié)構(gòu)模型的實驗結(jié)果。結(jié)果表明該機構(gòu)減少了機器人在各項運動過程中受到地面沖擊力的影響,提升了機器人的運動穩(wěn)定性;通過腰部扭動擴展足端可達(dá)空間,豐富了機器人運動姿態(tài)的多樣性。
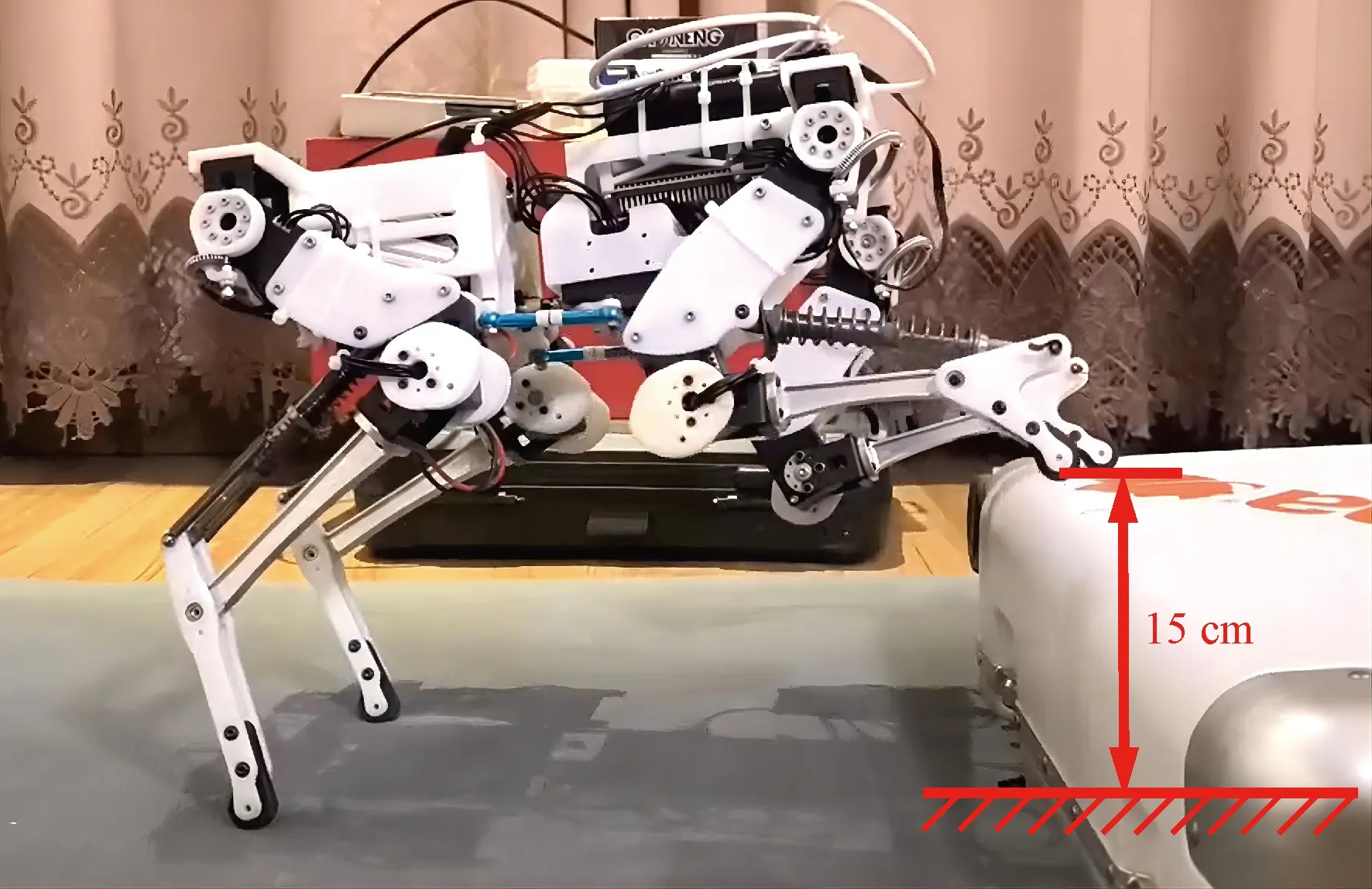
圖15 機械貓原型機極限越障測試Fig.15 Mechanical cat prototype extreme barrier crossing test
(3)該四足機器人的原型機實現(xiàn)了預(yù)期功能,驗證了仿真實驗結(jié)果的正確性,進(jìn)一步確認(rèn)了柔性腿部和主動腰部在四足機器人機械結(jié)構(gòu)設(shè)計中的合理性與可靠性。
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
電腦報(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
中華詩詞(2019年7期)2019-11-25 01:43:04
電腦報(2019年40期)2019-09-10 07:22:44
模具制造(2019年3期)2019-06-06 02:10:54
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
