無線紫外光通信下基于改進人工勢場法的無人機編隊控制研究*
2023-12-09 07:14:22高運克唐宏偉高方坤丁祥羅佳強王軍權
電氣傳動自動化 2023年6期
高運克,唐宏偉,高方坤,丁祥,羅佳強,王軍權
(邵陽學院多電源地區電網運行與控制湖南省重點實驗室,湖南 邵陽 42200)
現有的無人機編隊控制方法主要有領航者跟隨者(Leader-Follower)方法[1]、基于行為的方法、虛擬結構方法[2]、基于人工勢場避障的方法[3]、基于一致性理論的方法等。各種方法各有優缺,廣泛應用于無人機編隊控制領域。
文獻[5]將斥力勢場函數拆分成分段連續的形式,以此避免編隊避障過程出現的急促轉彎和頻繁大轉角,通過增加虛擬障礙物避免出現局部極小問題,并利用Bezier 曲線特點對飛行軌跡進行實時優化;文獻[6]結合了模糊控制算法,成功破壞了局部極小值位置的平衡狀態,還基于無人機的相對速度和動態障礙物構造了相對速度勢場;文獻[7]提出提前生成預規劃路徑,弱化目標位置對無人機編隊的引力作用,并在多條預規劃路徑中選定出能避免局部最優的一條路徑,但該方法不適用于高速動態下的復雜環境;文獻[8]通過設置碰撞預測機制,提出了基于傳統人工勢場避障算法并且能夠進行安全避障的編隊生成和保持算法,即通過改變無人機編隊中虛擬領航者的相對位置來實現隊形重構,從而完成編隊安全避障;文獻[9]將周圍的其他無人機也視作動態障礙物,提出了一種不需要獲知相鄰無人機飛行信息也可進行無人機安全避障和編隊控制的算法;文獻[10]利用指數函數的特征,在平衡點處構造了對稱且最大值有界的勢場,在勢場系數計算時能夠考慮到無人機運動狀態的條件限制,但該算法無法解決平衡點附近路徑振蕩問題,遇到動態障礙物的情況也不適用;文獻[11]是基于無人機編隊前進方向的向量來改進斥力產生機制,并設立虛擬引導點應對產生的局部最優問題;文獻[12]通過對最大轉彎角進行約束來緩解局部振蕩問題,并優化威脅區的模型,但仍具有局限性。
現有人工勢場避障算法少有綜合考慮到無人機編隊同時面對來自外部的局部極小值與路徑振蕩問題、以及鄰近無人機這一動態障礙物產生編隊內部撞機事件的可能性,在這個方向上值得進一步深入研究。
1.1 無線紫外光通信
由于無線紫外光通信(Uitraviolet Communications,UVC)[13]具有局域保密性好、抗干擾能力強、背景噪聲小的優點,將其作為無人機集群運行時的通信手段,即使在復雜環境下,無人機集群也可以保持穩定通信并進行信息共享。
無線紫外光通信是發射裝置發射出載有無人機狀態信息的紫外光經大氣信道中的氣溶膠等微粒散射,最終被接收裝置探測吸收,由于氣溶膠等微粒散射作用,無線紫外光通信不僅支持直視通信,還支持非直視通信。而根據發射端光束的發射角和接收端的接收視場角關系,直視通信可以分為三種類型:如圖1所示的(a)類通信方式、(b)類通信方式和(c)類通信方式[14]。
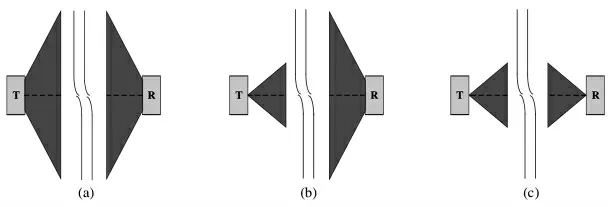
圖1 無線紫外光直視通信
無線紫外光直視鏈路在大氣自由空間下的功率損失呈現指數衰減,大氣衰減可表示為e-Ker,自由空間路徑功率損耗跟通信距離的平方成正比,即通信距離r越大,功率損耗越大,接收器接收到的能量與r2可以表示為信號接收器的接收增益為,其中λ是無線紫外光的波長,由此可得出無線紫外光通信鏈路直視通信情況下的接收光功率的表達式如式(1)[15]
可簡化為:
其中,Pt是發射器發出的光功率;Ke是大氣信道衰減系數;Ar是接收器的孔徑面積。
在無線紫外光通信中,傳輸效率定義為發送功率與接收功率的比值,表征信號從發射端到接收端之間信號衰減的大小,傳輸效率可以表示為:
1.2 傳統人工勢場法
人工勢場法是1986年Khatib[16]提出的理論,其基本思想是將整個環境看成一個巨大的人造勢場模型,將在這個勢場范圍內的無人機、障礙物等看成質點,無人機在勢場范圍內會受到兩種類型力的作用,其中無人機集群的目標點產生吸引力勢場,而阻礙無人機到達目標點的障礙物則產生排斥力勢場,無人機在吸引力與排斥力產生的合力作用下,從起點到達目標點。
在三維空間中,環境勢場定義在三維空間0-xyz中,無人機的空間坐標可以表示為X=(x,y,z),目標點的坐標為Xg=(xg,yg,zg),碰撞威脅物的坐標為X0=(x0,y0,z0),無人機到達目標點之前一直受到目標點的吸引力影響,目標點的吸引力隨著無人機距離的靠近逐漸減小,當無人機達到目的地,吸引力就會變成零,目標點產生的引力場函數為:
其中Ua(X)為引力場函數,ka為引力勢場常系數,d(X,Xg)=‖X-Xg‖為無人機到目標點的距離。
無人機受到目標點的吸引力Fa(X)是沿著引力勢場Ua(X)的負梯度方向,在無人機與目標點連線上并且指向目標點,即:
與引力場函數相似,斥力勢場函數也是與無人機到障礙物之間的距離有關,設d0為無人機到障礙物的最大威脅距離,當無人機與障礙物的距離小于等于d0時,障礙物才會對無人機產生斥力作用,此時無人機不斷靠近障礙物,受到的障礙物產生的斥力逐漸增大,由此得出障礙物產生的斥力場函數為:
其中Ur(X)為斥力場函數,kr是斥力場常系數,d(X,X0)=‖X-X0‖是無人機到障礙物的實時距離。
由公式(6)可推導出障礙物對無人機的斥力Fr(X),方向是沿著無人機與障礙物的連線上并指向無人機:
在人工勢場中,勢場函數定義為:
由拉格朗日方程和空間動力學可從公式(8)推出無人機在勢場中受到目標點和障礙物的勢場力為:
由于無人機在勢場中不只受到單個障礙物的作用,所以公式(9)還不是引導無人機安全達到目標點的飛行方向指導力,勢場中的無人機是靠著來自目標點的引力與多個障礙物產生的斥力的合力作為飛行方向,從而達到目標點,因此單個無人機所受到的勢場力可以表示為:
2 改進人工勢場法
正常情況下無人機按照公式(10)算法計算出的合力Fall(X)提供的飛行方向就能流暢地避開障礙物,成功到達目標集結點,但實際應用中不可避免會出現下面兩種情況。
(1)局部極小值問題
在理想情況下,當無人機順利到達目標點時,受到的吸引力和斥力的合力變成全局最小,但當目標點的吸引力與障礙物排斥力的合力在同一條直線上,大小相等方向相反時,此時無人機受到的勢場合力為0,無人機主觀以為到達了目標點而停止運行,這明顯是不正確的,無人機被困在一個局部極小值區域內。
為了解決上述局部極小值現象,如圖2所示,在無人機處于局部極小值的地方與目標集結點之間的法平面,計劃通過在法平面上選擇一個能產生水平方向力的附加勢場,使無人機能與目標集結點連線垂直方向且同時平行水平面的方向移動,從而跳出局部極小值點。
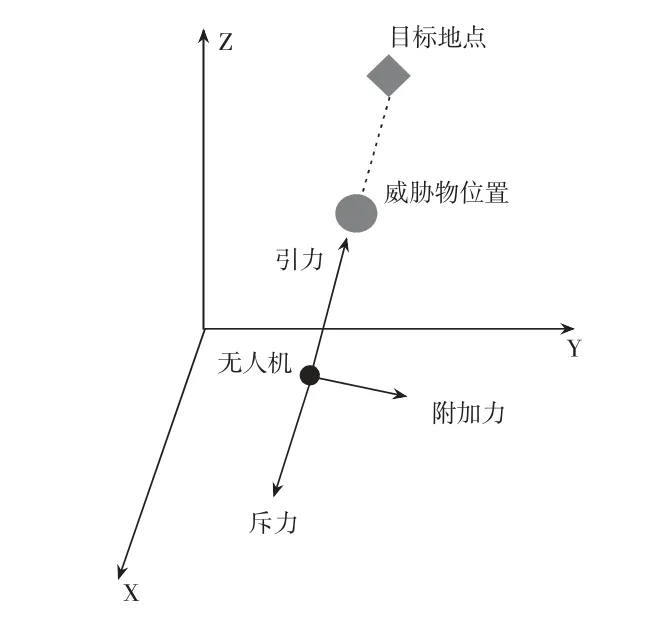
圖2 附加勢場示意圖
附加勢場函數為:
式中Xmin為無人機陷入極小值時的坐標,dadd是附加力作用的最遠距離,k是一個正整數。
(2)局部路徑振蕩問題
當無人機在運行途中,在k時刻的位置為Xk(xk,yk,zk),此時目標點對無人機的吸引力大于障礙物的排斥力,處于主導地位,無人機會朝著目標點所在位置前進,但同時也在不斷靠近障礙物,障礙物的排斥力逐漸增大,當來到k+1時刻,此時的位置是Xk+1(xk+1,yk+1,zk+1),障礙物的排斥力大于目標點的吸引力,此時障礙物產生的排斥力占據無人機運行方向的主導地位,無人機會向遠離障礙物的方向飛行,同時遠離目標點。在一段時間內排斥力和吸引力交替占據主導地位,導致臨近路徑點無人機受到的合力方向頻繁發生變化,具體表現在無人機運行軌跡上產生振蕩現象,無人機機群的振蕩問題對集群沖擊較大,很容易產生炸機現象,導致無人機集群系統崩潰,不得不予以重視。
如圖3所示為無人機產生局部振蕩問題時實際路徑的情況,本文采用重新計算新合力的方法來應對振蕩問題,假設無人機在k時刻的Xk(xk,yk,zk)位置發生振蕩,按照正常的人工勢場進行會根據當前目標點和障礙物的位置情況計算合力F1,通過合力作用到達k+1時刻的Xk+1(xk+1,yk+1,zk+1),當計算出下一路徑點的合力F1之后,再與之前從k-1時刻到k時刻的合力F2一起來計算新的合力F3,無人機到達k+1時刻使用的合力由F2變成了F3,通過中和前后兩個時刻點的合力方向進而減少實際合力的角度變化量,從而實時改善無人機局部振蕩問題。
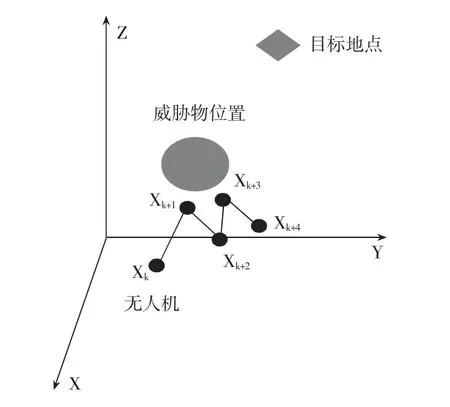
圖3 路徑振蕩現象
加入二次計算合力的數學表達式如式(12)所示:
其中D是無人機在兩個單位振蕩路徑點的實際飛行長度,Fk和Fk+1分別是人工勢場法計算出來的到達位置Xk和Xk+1的合力,a和b是兩個路徑點的權重因子,其取值大小由二次合力的角度變化量△δ決定[17],并且a+b=1。
3 系統控制流程
對于傳統人工勢場中靜態障礙物容易發生的局部極小值和路徑振蕩問題對人工勢場進行改進,使用增加附加力和二次合力計算手段來應對局部極小值和路徑振蕩問題,系統流程如圖4所示。
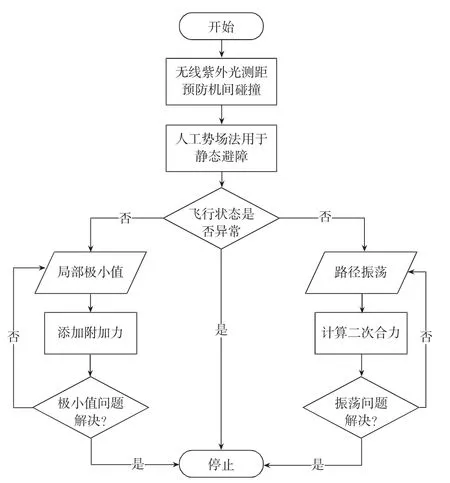
圖4 系統流程圖
4 系統實驗及分析
對搭載人工勢場算法的無人機集群進行仿真實驗,仿真實驗平臺是Matlab2021a,通過人為構造局部極小值和路徑振蕩現象,分別使用傳統人工勢場算法和改進后的人工勢場來進行對比實驗,觀察改進式人工勢場算法(Improvement Artificial Potential Field,IAPF) 是否能有效解決局部極小值和路徑振蕩問題。仿真參數如表1所示。
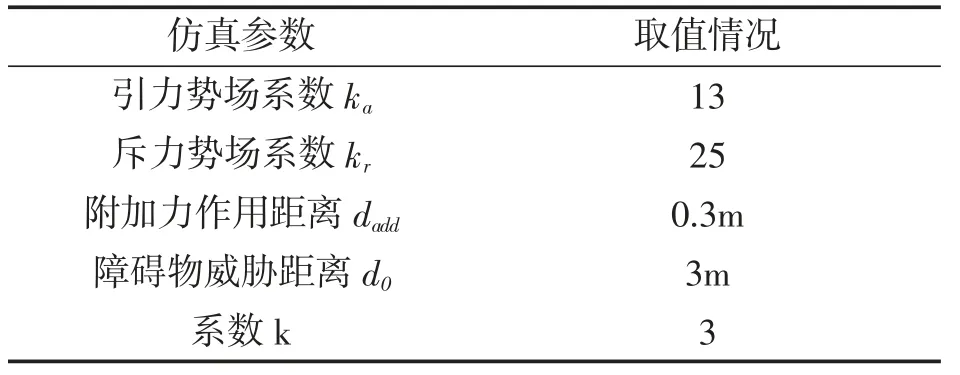
表1 仿真通用參數選取
4.1 局部極小值問題仿真與分析
針對無人機飛行避障時經常出現的路徑振蕩問題和局部極小值問題,比較傳統人工勢場和改進人工勢場,首先驗證局部極小值問題是否成功,設定起始點在(0,0,0)、目標位置在(10,10,10)、碰撞威脅物(5,5,5),這個場景下無人機、目標點、威脅膨脹物會在飛行路徑上連成一條直線,從而人為構成出局部極小值的現象,如圖5所示為實驗的具體情況。其中圖5(a)是無人機在預定條件下分別按照傳統人工勢場法和搭載改進人工勢場法計算出的全局飛行路徑,圖5(b)則是圖5(a)中標注的“1”的放大情況,方便進行理論分析,圖5(c)是無人機路徑點與碰撞威脅物的距離情況統計,圖5(d)是無人機行進路程點與目標集結點的距離統計。
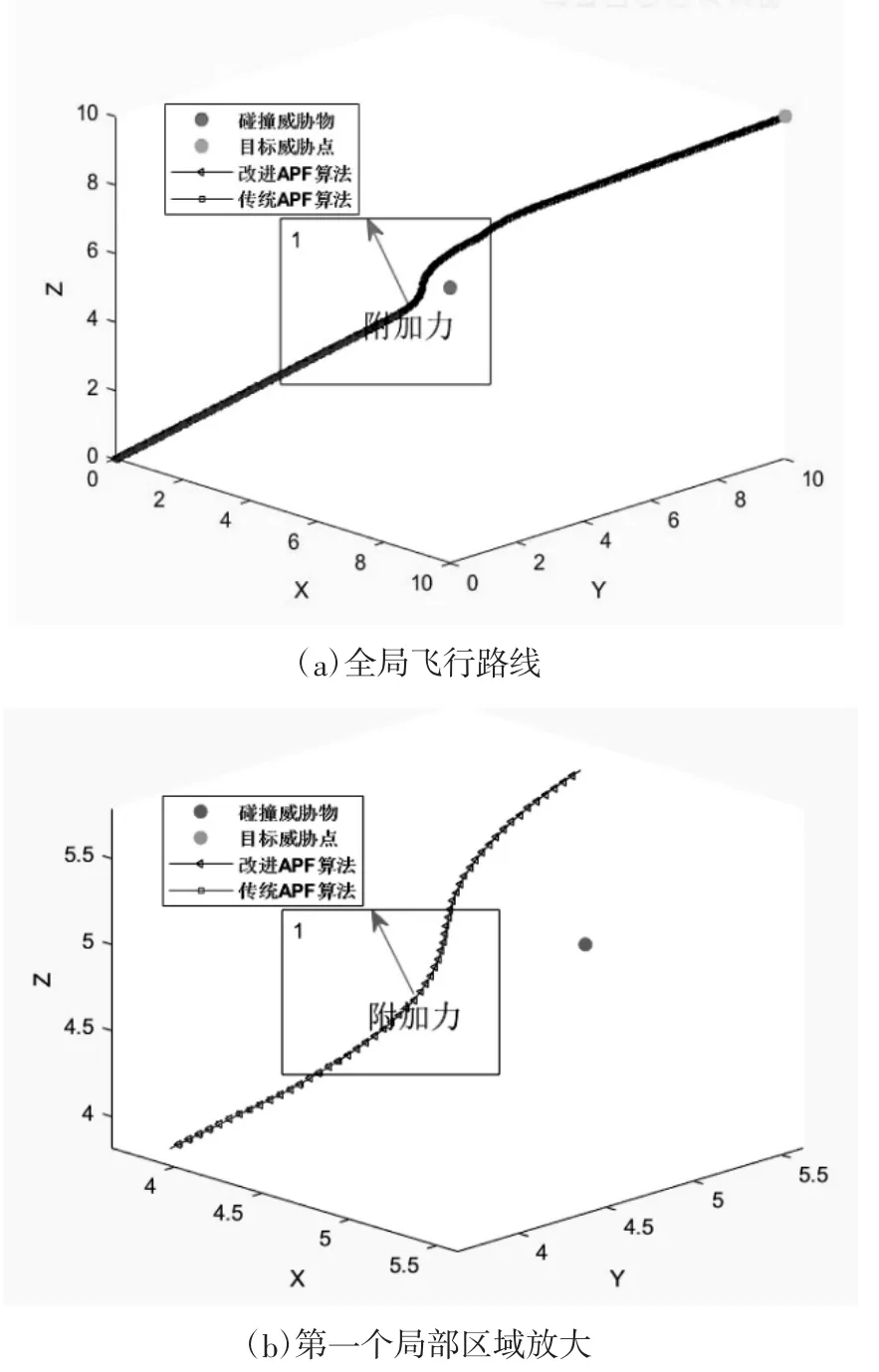
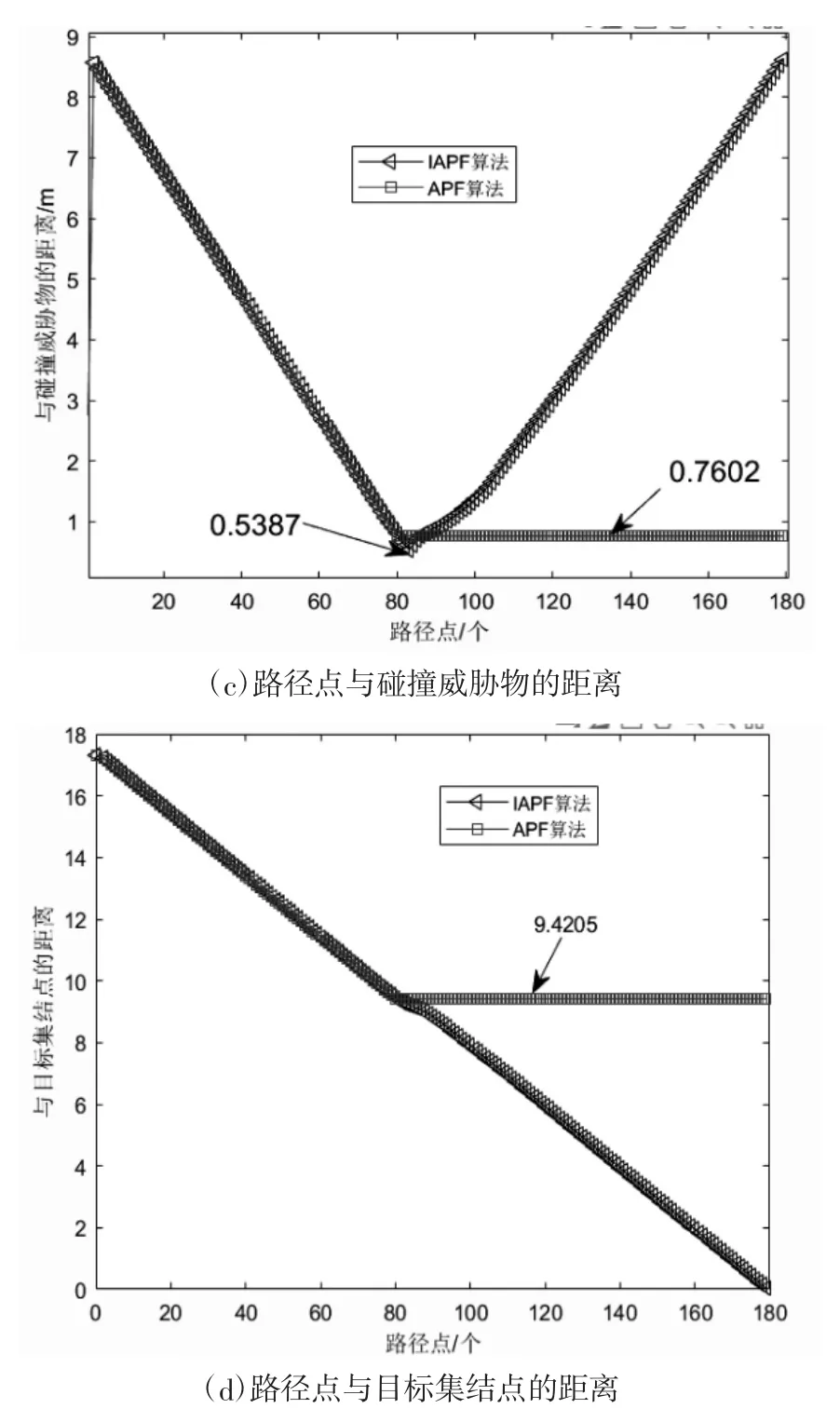
圖5 局部極小值實驗情況
從圖5(a)和圖5(b)中可以看出,在仿真實驗剛開始時,距離碰撞障礙物較遠,兩種算法計算出的路徑近乎一致,但傳統人工勢場算法航行到坐標(4.61,4.61,4.61)時,無人機飛行狀態陷入了局部極小值點,沒有能夠成功繞過障礙物。而改進后的人工勢場法在坐標(4.61,4.61,4.61)時同樣進入到了局部極小值位置,此時通過計算與目標點之間的距離關系,判斷出處于局部極小值狀態,測試在當前位置與目標集結點之間連線的垂直方向,且平行于水平面的方向上增加附加力,附加力作用的路徑長度是0.3m,作用完之后就消失,從圖5(a)運行軌跡上很明顯地看出附加力成功幫助無人機飛出了極小值點,擺脫了極小值狀態。
從圖5(c)和圖5(d)無人機路徑軌跡點與障礙物和目標位置的距離關系可知,傳統人工勢場是在距離障礙物0.760m時陷入了局部極小值,停止前進,而此時距離飛行任務目標位置還有9.420m,改進之后的人工勢場算法同樣在距離障礙物0.538m時陷入了局部極小值,在此時增加了附加力,使無人機成功跳出了局部極小值位置。
4.2 路徑振蕩問題仿真與分析
對路徑振蕩問題進行仿真實驗,設定無人機起始位置在(0,0,0)、障礙物坐標在(18.5,18.5,19)、目標點坐標在(20,20,20),人為制造路徑振蕩問題的發生,通過觀察傳統和改進之后人工勢場的運行情況,來驗證改進人工勢場能否解決路徑振蕩問題。如圖6所示為記錄仿真實驗室的數據情況,其中圖6(a)是無人機在預定條件下分別按照傳統人工勢場法和搭載改進人工勢場法計算出的全局飛行路徑,圖6(b)則是在碰撞威脅物附件路徑的放大圖,圖6(c)是無人機路徑點與碰撞威脅物的距離情況統計,圖6(d)是無人機行進路程點與目標集結點的距離統計。
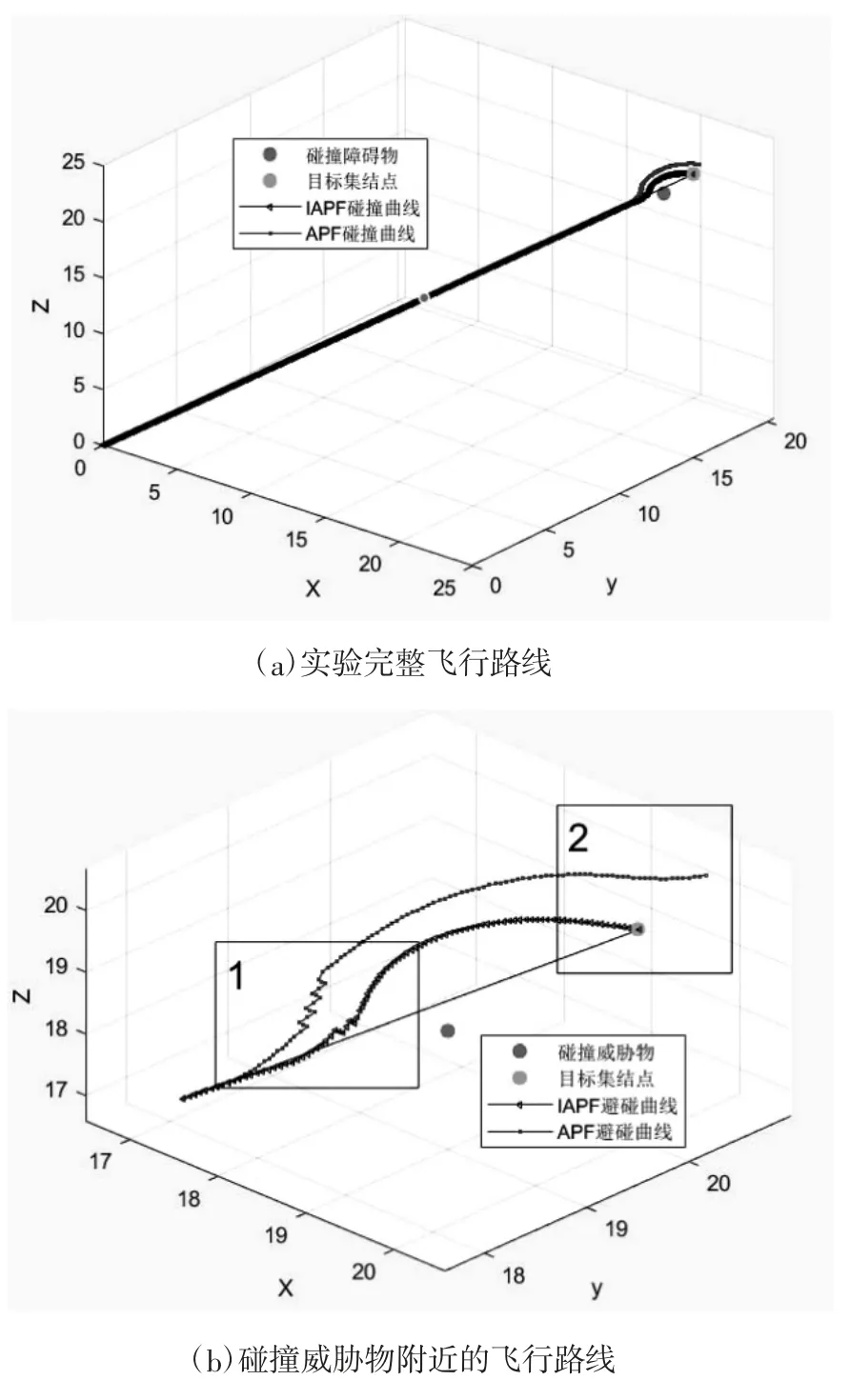
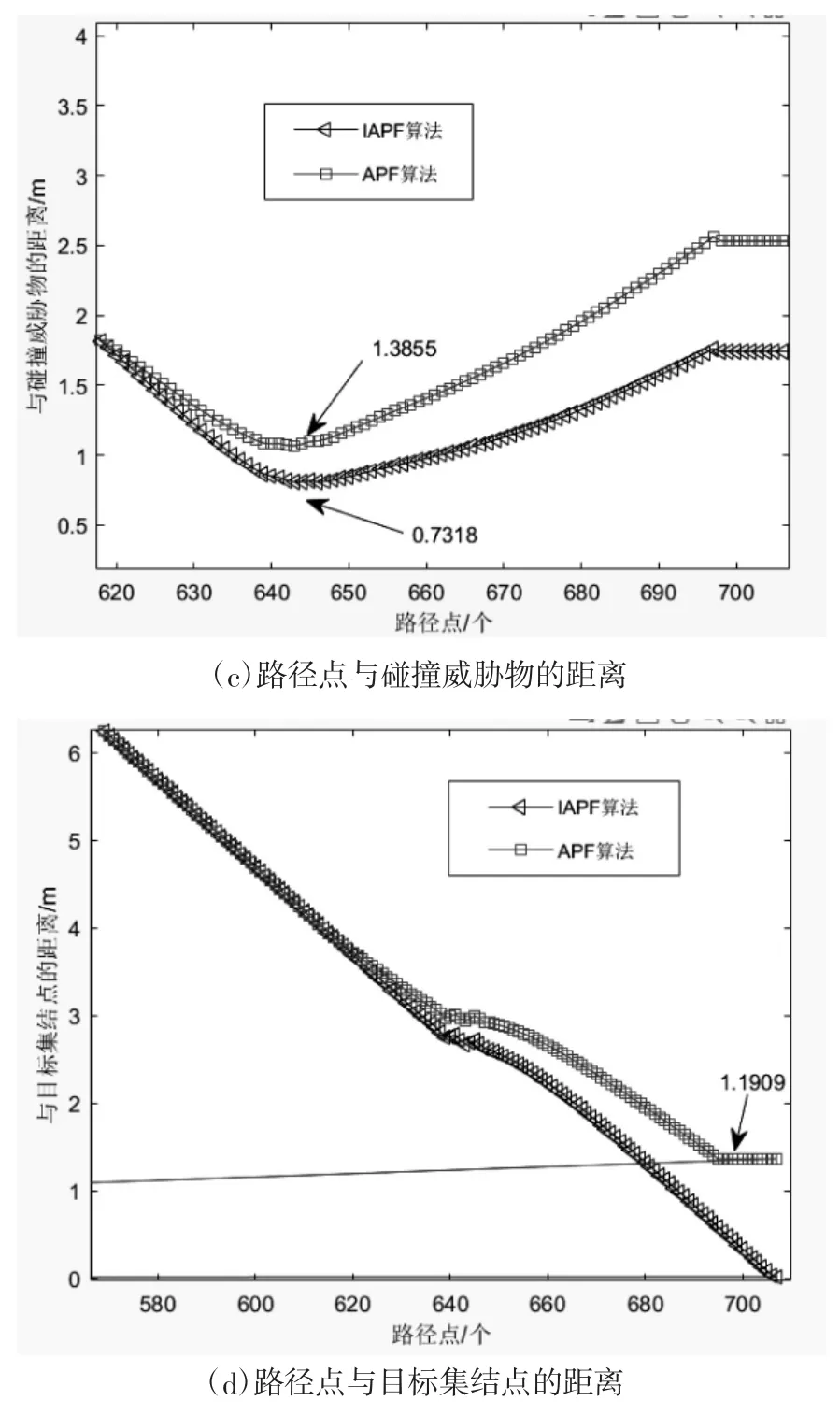
圖6 路徑振蕩實驗情況
由圖6(a)和圖6(b)可知,在實驗開始階段,距離障礙物和目標點較遠的情況下,兩種算法的路徑曲線幾乎一致,這是由于此時無人機受到的吸引力和排斥力大小方向基本相同,所以導致路徑幾乎重合。隨著無人機的飛行,逐漸靠近障礙物和目標點,當無人機距離障礙物小于危險告警區域范圍3m時,開始受到排斥力的作用,兩種算法的路徑點開始出現差別,當進入到障礙物3m范圍時,會突然施加一個較大的且由障礙物指向無人機機身的斥力,在傳統人工勢場下的反映出現了較為明顯的路徑振蕩現象,由于振蕩問題的發生,最后并沒有達到指定目的地,而改進后的人工勢場算法,在識別到出現振蕩現象的時候,進行了二次合力計算的改動,及時抑制了路徑振蕩問題,躲避障礙物的路徑轉角較為平緩,最終成功到達了目標位置。
在圖6(c)和圖6(d)中,當無人機來到路徑振蕩發生的路徑點時,搭載改進人工勢場算法有及時抑制振蕩路徑的持續,躲避障礙物的弧度較小,因此距離障礙物也較為接近,最近距離僅有0.731m,但此距離仍然大于碰撞距離0.3m,屬于可接受范圍。而傳統的人工勢場算法,無人機因不能及時抑制路徑振蕩問題而來回振蕩,雖然最終以較大角度成功躲避了障礙物,但還是沒有到達目標點,離最終的目標點仍然有1.19m的距離。
4.3 仿真實驗結果總結
表2所示為對極小值實驗和路徑振蕩實驗的數據總結,當遇到極小值和路徑振蕩問題時,搭載改進人工勢場算法能成功解決局部極小值問題和路徑振蕩,最終到達終點,但傳統人工勢場算法卻不能到達最終目標點,任務失敗。IAPF算法距離障礙物的距離雖然僅為0.538m,相比于APF算法小,但也在可控范圍,能夠保障機身安全。
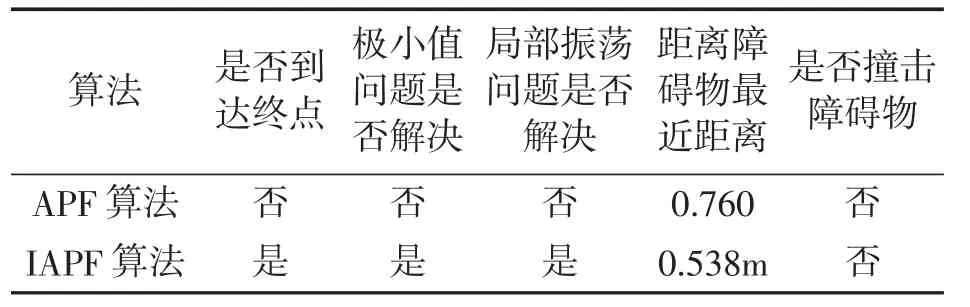
表2 仿真實驗結果
5 結論
本文從無人機集群實際工作環境出發,首先對復雜環境下無人機集群通信穩定難以維持的問題,利用無線紫外光通信背景噪聲小抗干擾能力強等優勢,將其作為無人機集群的通信手段來應對不同距離的鄰近無人機,在保障無人機運行期間通信穩定的情況下減少機與機之間動態變化下的撞擊事件。接著對于現實中經常出現的局部極小值和路徑振蕩現象進行處理,并通過改進人工勢場法有效解決了問題,進行了相關的仿真實驗,實驗現象表明,搭載無線紫外通信和改進人工勢場的無人機,不僅能在復雜多變的環境下保持通信,有效預防機與機之間動態變化下撞機事件的發生,對于局部極小值和路徑振蕩問題也能很好地解決,使無人機能夠在穩定通信的情況下,還能完成動態靜態障礙物避障任務,成功到達目標位置。