基于YOLOv4-tiny模型的水稻早期病害識(shí)別方法
2023-12-11 19:28:34王圓圓林建王姍
江蘇農(nóng)業(yè)科學(xué) 2023年16期
王圓圓 林建 王姍
摘要:針對(duì)現(xiàn)有的卷積神經(jīng)網(wǎng)絡(luò)模型過(guò)于依賴(lài)設(shè)備的計(jì)算和存儲(chǔ)能力、水稻病蟲(chóng)害形狀大小不一、遮擋造成的病害特征顯著性弱、漏檢率高等問(wèn)題,采用輕量化、易部署的YOLOv4-tiny模型檢測(cè)和識(shí)別水稻病蟲(chóng)害。首先收集831張4種不同的水稻病害葉片圖像樣本,為了使模型具有更好的泛化能力,對(duì)已有數(shù)據(jù)進(jìn)行數(shù)據(jù)增強(qiáng),將樣本數(shù)量擴(kuò)增到了5 320張。然后構(gòu)建YOLOv4-tiny輕量化模型,與經(jīng)典的YOLOv4算法模型相比,其主干特征提取網(wǎng)絡(luò)CSPDarkNet53模塊替換為CSPDarkNet53_tiny,使用CPSnet進(jìn)行通道的分割,實(shí)現(xiàn)了網(wǎng)絡(luò)模型的壓縮并提高了訓(xùn)練速度;添加了FPN結(jié)構(gòu),對(duì)有效特征層進(jìn)行特征融合;依據(jù)模型評(píng)價(jià)指標(biāo),通過(guò)試驗(yàn)將YOLOv4-tiny輕量化網(wǎng)絡(luò)與經(jīng)典的YOLOv4網(wǎng)絡(luò)、Faster-RCNN網(wǎng)絡(luò)、YOLOv4-MobileNet系列輕量化網(wǎng)絡(luò)、YOLOv4-GhostNet輕量化網(wǎng)絡(luò)和SSD輕量化網(wǎng)絡(luò)進(jìn)行對(duì)比。結(jié)果表明,YOLOv4-tiny的平均準(zhǔn)確率可以達(dá)到81.79%,檢測(cè)速度可以達(dá)到90.03幀/s,模型權(quán)重大小為22.4 MB,能夠比較精準(zhǔn)地識(shí)別水稻胡麻斑病、白葉枯病、稻瘟病和窄條斑病,保證在輕量化計(jì)算成本的基礎(chǔ)上獲得較好的檢測(cè)精度,可以為水稻病蟲(chóng)害識(shí)別方法提供參考。
關(guān)鍵詞:輕量化模型;YOLOv4-tiny;水稻病蟲(chóng)害;目標(biāo)檢測(cè);精準(zhǔn)農(nóng)業(yè)
中圖分類(lèi)號(hào):TP391.41文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1002-1302(2023)16-0147-07
收稿日期:2022-11-19
基金項(xiàng)目:國(guó)家重點(diǎn)研發(fā)計(jì)劃(編號(hào):2016YFD0300508)。
作者簡(jiǎn)介:王圓圓(1999—),女,山東棗莊人,碩士研究生,主要研究方向數(shù)字圖像處理與病蟲(chóng)害目標(biāo)檢測(cè)。E-mail:1729734824@qq.com。
通信作者:林 建,博士,副教授,碩士生導(dǎo)師,主要研究方向逆向設(shè)計(jì)、數(shù)字圖像處理。E-mail:1827740@qq.com。
水稻在我國(guó)的種植歷史悠久,約占全國(guó)耕地總面積的25%,不僅是我國(guó)的三大主糧之一,而且產(chǎn)量一直處于世界領(lǐng)先地位,種植面積位居世界第二,是中國(guó)農(nóng)業(yè)生產(chǎn)中不可替代的重要農(nóng)作物。但在水稻的生長(zhǎng)周期內(nèi),伴隨著水稻病蟲(chóng)害的頻發(fā),給我國(guó)水稻產(chǎn)業(yè)造成了嚴(yán)重的經(jīng)濟(jì)損失。長(zhǎng)期以來(lái),傳統(tǒng)農(nóng)作物的識(shí)別主要依靠人工鑒別的方式,一般主要依靠當(dāng)?shù)刂脖2块T(mén)的農(nóng)業(yè)專(zhuān)家識(shí)別,但人工鑒別存在的問(wèn)題是工作量大容易誤診、識(shí)別效率低下,對(duì)水稻病蟲(chóng)害的鑒別種類(lèi)有限等[1]。現(xiàn)階段,普遍采用的水稻病蟲(chóng)害防治方法主要是播種前對(duì)種子包衣消毒處理,提高幼苗對(duì)病害細(xì)菌的抵抗力,噴灑病蟲(chóng)害藥劑或使用誘光燈誘捕害蟲(chóng),但這些防治方法無(wú)疑都在一定程度傷害了水稻幼苗的正常生長(zhǎng),化學(xué)劑的過(guò)度使用還會(huì)對(duì)個(gè)人的身體健康和環(huán)境保護(hù)造成負(fù)面影響,除此之外,在農(nóng)作物市場(chǎng)上,消費(fèi)者也越來(lái)越傾向于選擇有機(jī)生產(chǎn)的農(nóng)產(chǎn)品,這些發(fā)展預(yù)計(jì)將會(huì)導(dǎo)致化學(xué)劑在農(nóng)作物中的使用越來(lái)越少,強(qiáng)調(diào)了早期準(zhǔn)確識(shí)別水稻等農(nóng)作物病害的重要性。因此,嘗試將計(jì)算機(jī)技術(shù)應(yīng)用到水稻病蟲(chóng)害識(shí)別中,不僅有助于為水稻病蟲(chóng)害的防控提供理論依據(jù)和技術(shù)支持,而且對(duì)提高水稻產(chǎn)量、促進(jìn)農(nóng)作物市場(chǎng)的健康發(fā)展和經(jīng)濟(jì)發(fā)展具有重要的現(xiàn)實(shí)意義。
根據(jù)對(duì)圖像病害特征提取方式的不同,目前基于圖像的農(nóng)作物病蟲(chóng)害檢測(cè)方法大致可以分為兩類(lèi):基于傳統(tǒng)機(jī)器學(xué)習(xí)的方法和基于深度學(xué)習(xí)的方法。傳統(tǒng)的機(jī)器學(xué)習(xí)方法識(shí)別水稻病蟲(chóng)害的主要思路是:首先基于采集的數(shù)據(jù)集對(duì)不同的水稻病蟲(chóng)害特征進(jìn)行提取,常用的提取方法是GIST、SIFT和SURF等,之后采取以K近鄰分類(lèi)方法、支持向量機(jī)方法以及決策樹(shù)等為代表的傳統(tǒng)機(jī)器學(xué)習(xí)方法對(duì)特征分類(lèi)[2]。范春全等采用橢圓型度量矩陣提升SVM分類(lèi)器識(shí)別水稻蟲(chóng)害能力[3]。王映龍等應(yīng)用圖像處理技術(shù)對(duì)水稻蟲(chóng)害進(jìn)行識(shí)別[4]。姚青等提出將水稻多特征提取與機(jī)器學(xué)習(xí)相結(jié)合,實(shí)現(xiàn)對(duì)水稻紋枯病的識(shí)別[5]。但基于傳統(tǒng)機(jī)器學(xué)習(xí)的病害識(shí)別方法主要依賴(lài)于準(zhǔn)確提取的特征參數(shù),對(duì)輸入的圖片進(jìn)行分類(lèi),而且一般僅能提取幾種典型的特征來(lái)表達(dá)幾種病害的所有信息,處于復(fù)雜背景下圖像特征提取還需要多種算法相結(jié)合。只能提取少量的典型特征帶來(lái)的結(jié)果就是提取的特征相似度高,而現(xiàn)實(shí)中水稻病害的種類(lèi)和形狀是多種多樣的,導(dǎo)致識(shí)別效果不夠理想。
但隨著深度學(xué)習(xí)技術(shù)不斷被應(yīng)用到農(nóng)作物病蟲(chóng)害識(shí)別的領(lǐng)域中來(lái),房若民等使用Mobile Net模型檢測(cè)10個(gè)物種,包括27個(gè)類(lèi)型的農(nóng)業(yè)病蟲(chóng)害[6]。燕斌等利用Inception-V3網(wǎng)絡(luò)和Image Net數(shù)據(jù)集實(shí)現(xiàn)8種病蟲(chóng)害的識(shí)別[7]。蔣豐千等將卷積神經(jīng)網(wǎng)絡(luò)及輪廓分割等預(yù)處理方法結(jié)合起來(lái),以生姜的病蟲(chóng)害圖像數(shù)據(jù)集為研究對(duì)象,對(duì)白星病、根結(jié)線蟲(chóng)病、炭疽病和姜瘟病進(jìn)行分類(lèi)研究,正確率高達(dá)96%[8]。蒲秀夫等提出使用二值化卷積神經(jīng)網(wǎng)絡(luò)模型進(jìn)行農(nóng)業(yè)病蟲(chóng)害的識(shí)別,為后續(xù)的植物病蟲(chóng)害研究提供了理論依據(jù)[9]。楊穎等提出了基于方向梯度直方圖和局部二值化模式的水稻病蟲(chóng)害識(shí)別方法,在小樣本訓(xùn)練以及效率高等方面均具有明顯的優(yōu)勢(shì)[10]。基于深度學(xué)習(xí)的識(shí)別方法通常需要大量的數(shù)據(jù)作為模型的訓(xùn)練基礎(chǔ)以獲取較高的識(shí)別精度,而現(xiàn)實(shí)中水稻的病蟲(chóng)害數(shù)據(jù)集構(gòu)建還不夠完善,無(wú)法提供足夠大的訓(xùn)練樣本。為了彌補(bǔ)樣本不夠的缺陷,往往采取提高深度學(xué)習(xí)深度的策略,這樣導(dǎo)致的負(fù)面影響是模型復(fù)雜度變高,參數(shù)量和體積變大,這就限制了在移動(dòng)設(shè)備中的應(yīng)用。對(duì)于現(xiàn)實(shí)投入防治的設(shè)備而言,計(jì)算力和存儲(chǔ)力都非常有限,過(guò)大的模型和冗余的參數(shù)會(huì)造成存儲(chǔ)資源的浪費(fèi),因此,使用輕量化的水稻病害檢測(cè)方法至關(guān)重要。
1 圖像數(shù)據(jù)集和預(yù)處理
1.1 試驗(yàn)數(shù)據(jù)
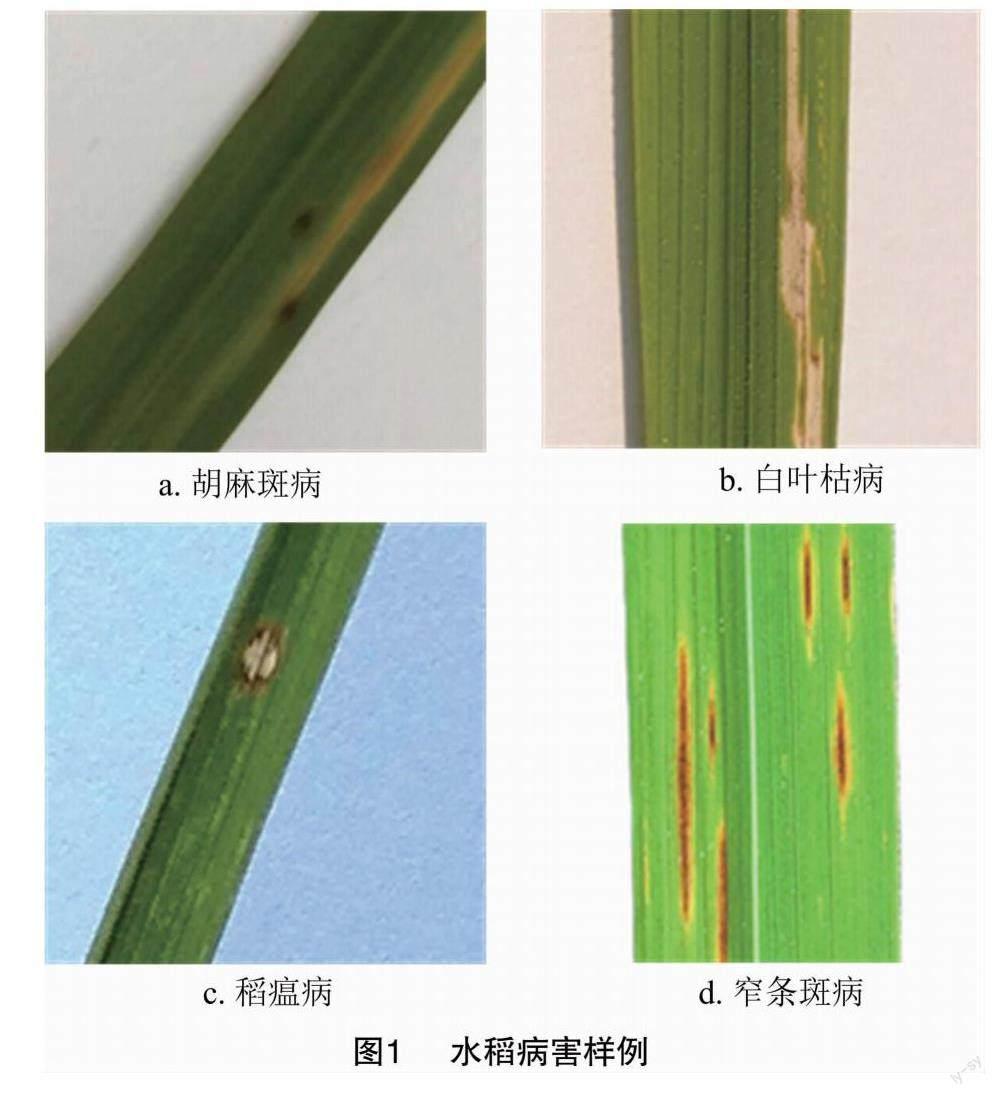
本試驗(yàn)采用PASCAL VOC數(shù)據(jù)集對(duì)模型進(jìn)行預(yù)訓(xùn)練,很多優(yōu)秀的計(jì)算機(jī)視覺(jué)模型都是基于PASCAL VOC數(shù)據(jù)集推出的,尤其是一些目標(biāo)檢測(cè)模型。本試驗(yàn)中的樣本數(shù)據(jù)集來(lái)源主要是Kaggle網(wǎng)站采集,構(gòu)建水稻病害數(shù)據(jù)集831張,包括4類(lèi)水稻病害數(shù)據(jù),分別為稻瘟病、水稻窄條斑病、水稻白葉枯病和水稻胡麻斑病。其中稻瘟病224張,水稻窄條斑病213張,水稻白葉枯病140張,水稻胡麻斑病254張。水稻病蟲(chóng)害樣例如圖1所示。
1.2 數(shù)據(jù)增強(qiáng)
為防止訓(xùn)練數(shù)據(jù)量過(guò)少發(fā)生過(guò)擬合現(xiàn)象,本研究采用旋轉(zhuǎn)、放大縮小、水平翻轉(zhuǎn)、垂直翻轉(zhuǎn)、添加隨機(jī)噪聲和提升亮度等數(shù)據(jù)增強(qiáng)的方式對(duì)數(shù)據(jù)集進(jìn)行擴(kuò)增,最終水稻病蟲(chóng)害數(shù)據(jù)集包含5 320張圖像,水稻病蟲(chóng)害區(qū)域數(shù)12 855個(gè),按照8∶1∶1的比例劃分為訓(xùn)練集(4 256張)、驗(yàn)證集(532張)和測(cè)試集(532張),其中訓(xùn)練集水稻病蟲(chóng)害數(shù)據(jù)集分布如表1所示。擴(kuò)增后的數(shù)據(jù)集為PASCAL VOC格式,使用LabelImg工具人工標(biāo)注每張圖片照片中病蟲(chóng)害目標(biāo)所在的區(qū)域數(shù)據(jù),生成.xml格式的標(biāo)簽文件,記錄所有目標(biāo)檢測(cè)框的位置、大小以及類(lèi)別信息,經(jīng)命名后存入標(biāo)簽文件夾。
2 研究方法
2.1 經(jīng)典的YOLOv4算法
首先,YOLOv4算法是一種經(jīng)典的單階段目標(biāo)檢測(cè)算法,網(wǎng)絡(luò)模型由輸入端Input、急轉(zhuǎn)網(wǎng)絡(luò)Backbone、頸部網(wǎng)絡(luò)Neck和頭部網(wǎng)絡(luò)Head共4個(gè)部分構(gòu)成,網(wǎng)絡(luò)結(jié)構(gòu)如圖2所示。
Input模塊通過(guò)Mosaic利用4張圖片拼接實(shí)現(xiàn)數(shù)據(jù)增強(qiáng),豐富檢測(cè)物體的背景,Label Smoothing平滑對(duì)分類(lèi)準(zhǔn)確度做出懲罰,避免因模型分類(lèi)太準(zhǔn)確出現(xiàn)過(guò)擬合,Backbone模塊主要是采用CSPDarkNet53特征提取網(wǎng)絡(luò),使用了殘差網(wǎng)絡(luò)Residual,主干部分是1次1×1卷積和1次3×3的卷積,殘差邊部分不做任何處理,直接將主干的輸入與輸出結(jié)合。采用CSPNet網(wǎng)絡(luò)結(jié)構(gòu),將原來(lái)的殘差塊的堆疊拆分為左右2個(gè)部分:主干部分繼續(xù)進(jìn)行原來(lái)殘差塊的堆疊;另一部分則像一個(gè)殘差邊,在經(jīng)過(guò)少量處理后連接到最后[11]。采用低成本的Mish激活函數(shù),該函數(shù)具備光滑、非單調(diào)、上無(wú)界、有下界的特性,與其他常用函數(shù)如ReLU和Swish相比,泛化性能更好。
Neck模塊采用的是空間金字塔池化(SPP)結(jié)構(gòu)+路徑聚合網(wǎng)絡(luò)(PAN)結(jié)構(gòu):SPP網(wǎng)絡(luò)結(jié)構(gòu)通過(guò)不同池化核大小的最大池化進(jìn)行特征提取,提高網(wǎng)絡(luò)的感受野,網(wǎng)絡(luò)中使用了3個(gè)不同尺度的池化(5×5、9×9、13×13),這樣會(huì)得到更加豐富的特征[12],其結(jié)構(gòu)如圖3所示。作為Neck的特征融合模塊,一個(gè)重要特征就是對(duì)特征的反復(fù)提取,F(xiàn)PN是自頂向下,將高層的強(qiáng)語(yǔ)義特征傳遞下來(lái),對(duì)整個(gè)金字塔進(jìn)行增強(qiáng),但是只增強(qiáng)了語(yǔ)義信息而沒(méi)有定位信息[13]。PAN就是針對(duì)這一點(diǎn)做了補(bǔ)充,用一個(gè)自底向上的金字塔將低層的強(qiáng)定位特征傳遞上去。
Head模塊中的Bounding box的損失函數(shù)為CIoU_Loss,它在DIoU_Loss的基礎(chǔ)上將長(zhǎng)寬比考慮進(jìn)去,一個(gè)優(yōu)異的回歸定位損失要考慮到重疊面積、中心點(diǎn)距離和長(zhǎng)寬比,DIoU_Loss只考慮到了前2點(diǎn),CIoU_Loss函數(shù)的改進(jìn)使得目標(biāo)框回歸后變得更加穩(wěn)定,不會(huì)出現(xiàn)發(fā)散的問(wèn)題。
2.2 YOLOv4-tiny網(wǎng)絡(luò)算法
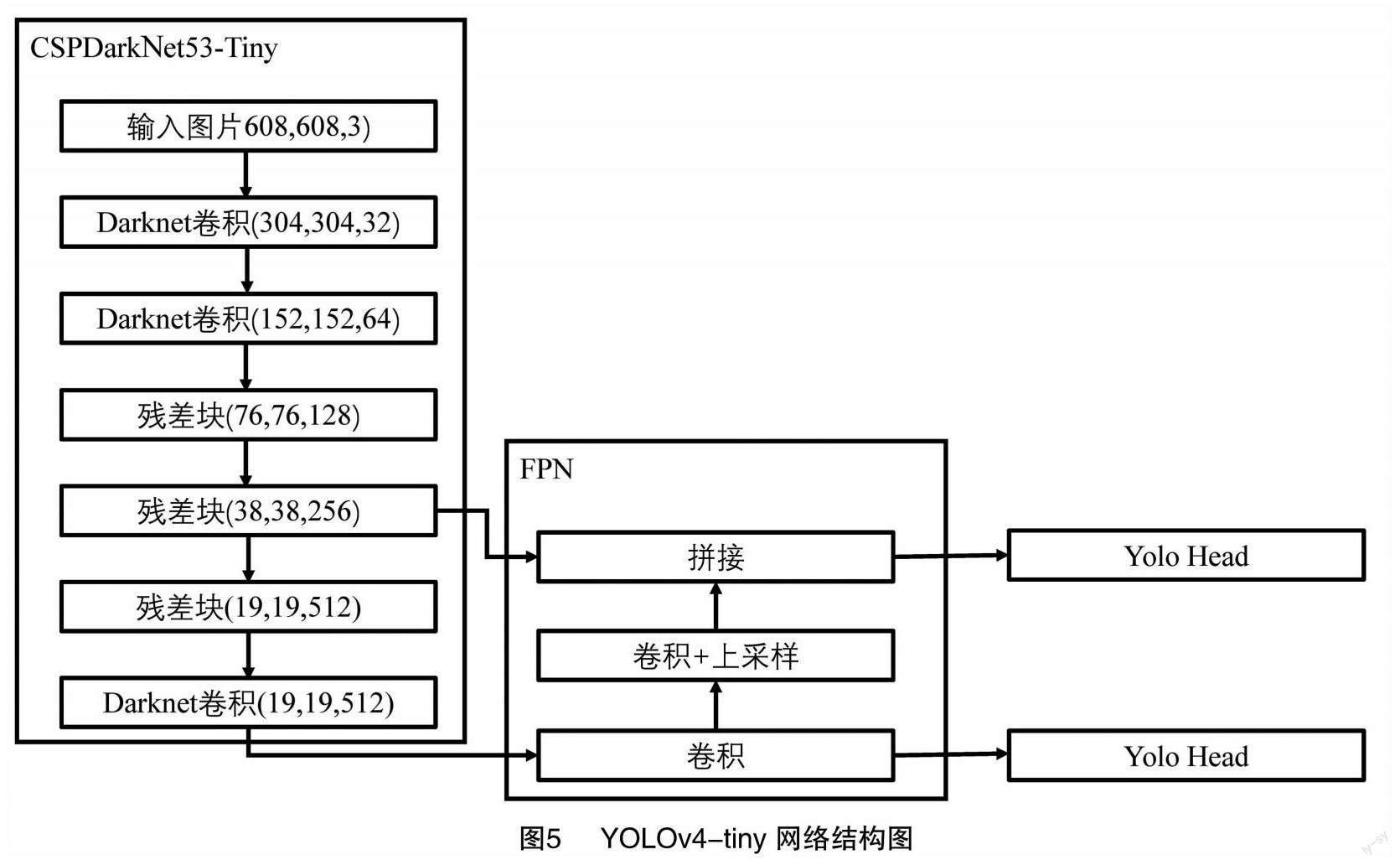
YOLOv4-tiny網(wǎng)絡(luò)模型是YOLOv4的輕量化簡(jiǎn)潔版,在追求精度和速度之間達(dá)到了一個(gè)平衡,與經(jīng)典的YOLOv4算法有以下幾個(gè)不同之處:(1)主干特征提取網(wǎng)絡(luò)的替換。YOLOv4-tiny網(wǎng)絡(luò)模型采用的是CSPDarkNet53_tiny替換CSPDarkNet53模塊作為主干特征提取網(wǎng)絡(luò)[14]。相比于YOLOv4中的CBL和ResBlock組成的主干特征提取網(wǎng)絡(luò),該網(wǎng)絡(luò)主要由CBL和CPSBlock結(jié)構(gòu)組成。CPSBlock首先將特征映射為2個(gè)部分,相當(dāng)于對(duì)原來(lái)的殘差塊進(jìn)行了一個(gè)拆分,拆分為兩部分,除主干部分繼續(xù)進(jìn)行原來(lái)的殘差塊的堆疊外,另一部分則像一個(gè)殘差邊一樣,經(jīng)過(guò)少量處理直接連接到最后[15],讓梯度流在2種不同的網(wǎng)絡(luò)路徑上進(jìn)行傳播,最后重新組合在一起,增加梯度信息的相關(guān)差異性,大大較少了卷積神經(jīng)網(wǎng)絡(luò)的計(jì)算量,彌補(bǔ)了YOLOv4中的ResBlock模塊計(jì)算量大的缺點(diǎn)。(2)激活函數(shù)的改變。使用LeakyReLU激活函數(shù)取代CBL中的Mish激活函數(shù),有利于減少模型的參數(shù)量,提高卷積神經(jīng)網(wǎng)絡(luò)的計(jì)算速度。(3)頸部網(wǎng)絡(luò)使用特征金字塔(FCN)結(jié)構(gòu)。在特征融合部分,沒(méi)有采用YOLOv4中的空間金字塔池化(SPP)和路徑聚合網(wǎng)絡(luò)結(jié)構(gòu)(PAN),而是使用特征金字塔結(jié)構(gòu)對(duì)第1步獲得的2個(gè)26×26和13×13的有效特征層進(jìn)行特征融合,F(xiàn)PN會(huì)將最后一個(gè)有效特征層卷積后進(jìn)行上采樣,然后與上一個(gè)有效特征層進(jìn)行堆疊并卷積[16]。(4)YOLOv4-tiny的預(yù)測(cè)模塊和YOLOv4類(lèi)似,先使用k-means聚類(lèi)算法生成錨框,調(diào)整輸入圖像的大小,使所有圖像具有相同的尺寸,然后將圖像分為大小為S×S的網(wǎng)格,每個(gè)網(wǎng)格使用B個(gè)邊界框檢測(cè)目標(biāo),之后圖像會(huì)生成S×S×B的邊界框覆蓋整個(gè)圖像[17]。圖4是13×13尺度的檢測(cè)示意圖,網(wǎng)格中的任意一個(gè)格子(如標(biāo)注的紅色框格子)都對(duì)應(yīng)了3個(gè)大小形狀不同的黃色框。
兩者都使用CIOU代替IOU計(jì)算邊界框定位損失,根據(jù)圖像的中心點(diǎn)落在了哪個(gè)網(wǎng)絡(luò)中來(lái)預(yù)測(cè)網(wǎng)絡(luò)中的邊界框,邊界框的置信度高于置信閾值,則邊界框保持不變,否則邊界框?qū)⒈粍h除,解決了真實(shí)框和預(yù)測(cè)框非重疊情形下梯度消失的問(wèn)題,使得邊界框回歸變得更加穩(wěn)定[18],YOLOv4-tiny 的網(wǎng)絡(luò)結(jié)構(gòu)如圖5所示。
2.3 試驗(yàn)平臺(tái)
試驗(yàn)硬件設(shè)置為Inter CoreTMi7-6850K,主存是3.60 GHz,模型在具有12 G顯存的NVIDIA GeForce GTX TITAN X上進(jìn)行訓(xùn)練,試驗(yàn)采用的操作系統(tǒng)是Windows10操作系統(tǒng)。軟件環(huán)境為CUDA 11.6,采用的是pytorch 1.12.1深度學(xué)習(xí)框架。
2.4 模型訓(xùn)練
模型在訓(xùn)練過(guò)程中,首先將訓(xùn)練集圖像的分辨率全部轉(zhuǎn)換為416像素×416像素。由于在實(shí)際生活中,水稻病蟲(chóng)害區(qū)域可能會(huì)被其他健康葉片遮擋,影響目標(biāo)識(shí)別的準(zhǔn)精確率,所以本研究采用Mosaic數(shù)據(jù)增強(qiáng)方法,從訓(xùn)練集中隨機(jī)選取4張圖像進(jìn)行隨機(jī)裁剪并拼接為1張圖像,生成的圖像與4張訓(xùn)練集圖像的分辨率一致,而在隨機(jī)裁剪的過(guò)程中,訓(xùn)練集圖像目標(biāo)框的一部分可能會(huì)被裁剪掉,從而模擬病蟲(chóng)害目標(biāo)區(qū)域被物體遮擋的效果[19],豐富樣本背景的復(fù)雜性,提高識(shí)別的準(zhǔn)確率[20]。采用余弦退火策略降低學(xué)習(xí)率,目標(biāo)類(lèi)別數(shù)目為6,初始學(xué)習(xí)率為0.001,平滑標(biāo)簽設(shè)置為0,權(quán)重衰減速率設(shè)置為0.000 5,動(dòng)量設(shè)置為0.9,優(yōu)化器使用隨機(jī)梯度下降法(SGD),使用預(yù)訓(xùn)練權(quán)重和凍結(jié)訓(xùn)練的策略,將訓(xùn)練過(guò)程分為凍結(jié)階段和解凍階段,總共設(shè)置了300次迭代。其中凍結(jié)訓(xùn)練迭代次數(shù)為50次,批量為32;解凍訓(xùn)練迭代次數(shù)為250次,批量為16。
2.5 評(píng)價(jià)指標(biāo)
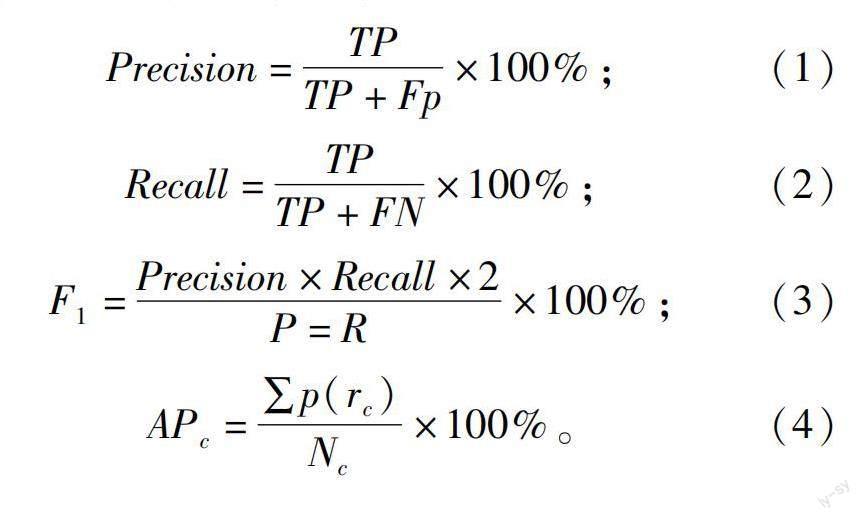
本試驗(yàn)使用精確度(Precision)、召回率(Recall)、平均精度(AP)、F1分?jǐn)?shù)和每秒傳輸幀數(shù)(FPS)來(lái)評(píng)價(jià)模型對(duì)水稻的病蟲(chóng)害的識(shí)別效果。FPS為模型識(shí)別一幅圖像所需要的時(shí)間,作為模型識(shí)別速度的評(píng)判指標(biāo),其余各個(gè)評(píng)價(jià)指標(biāo)的計(jì)算過(guò)程如公式(1)~(5)所示,其中,若一個(gè)實(shí)例是正類(lèi),并且被預(yù)測(cè)為正類(lèi),即為真正類(lèi)(TP);若一個(gè)實(shí)例是正類(lèi),并且被預(yù)測(cè)為負(fù)類(lèi),即為假負(fù)類(lèi)(FN);若一個(gè)實(shí)例是負(fù)類(lèi),并且被預(yù)測(cè)為正類(lèi),即為假正類(lèi)(FP);若一個(gè)實(shí)例是負(fù)類(lèi),并且被預(yù)測(cè)為負(fù)類(lèi),即為真負(fù)類(lèi)(TN)[21],p(rc) 表示在召回率rc的情況下的p值。Nc表示數(shù)據(jù)集中總圖片的數(shù)目,N表示數(shù)據(jù)集中待檢測(cè)目標(biāo)的總類(lèi)別數(shù)。
平均精度均值為
3 試驗(yàn)結(jié)果
3.1 YOLOv4-tiny模型訓(xùn)練結(jié)果
采用預(yù)訓(xùn)練權(quán)重對(duì)YOLOv4-tiny模型進(jìn)行訓(xùn)練,對(duì)水稻白葉枯病、稻瘟病、水稻窄條紋病、褐水稻胡麻斑病4種病害的識(shí)別測(cè)試樣例如圖6所示,訓(xùn)練集和驗(yàn)證集的損失值變化如圖7所示。由圖6可知,損失值變化分別為訓(xùn)練集損失值、驗(yàn)證集損失值,前30次迭代損失值急劇降低,直到50次迭代之后迭代損失值的變化才趨于穩(wěn)定,在小范圍內(nèi)振蕩。
3.2 不同輕量化模型對(duì)水稻病蟲(chóng)害檢測(cè)性能比較
YOLOv4-MobileNet系列輕量化模型、YOLOv4-Tiny輕量化模型、YOLOv4-Ghostnet輕量化模型和YOLOv4模型分別迭代300輪,不同的模型在訓(xùn)練集和驗(yàn)證集上得到的準(zhǔn)確率和損失變化曲線如圖8所示。從訓(xùn)練集和驗(yàn)證集的準(zhǔn)確率變化可以看出,迭代200輪后YOLOv4-Ghostnet的識(shí)別準(zhǔn)確率最高,其次就是YOLOv4-Tiny,準(zhǔn)確率最低的是YOLOv4-MobileNetV2。從網(wǎng)絡(luò)訓(xùn)練的收斂速度來(lái)看,YOLOv4-Tiny的驗(yàn)證集初始損失值最低,平均損失值最低,在迭代100輪后幾乎已經(jīng)完全收斂,而其余網(wǎng)絡(luò)則是在完成迭代200多輪之后才完全收斂,YOLOv4-MobileNetV3的平均損失值最高,在訓(xùn)練集和驗(yàn)證集上,YOLOv4-MobileNet系列輕量化模型的損失值波動(dòng)最大,YOLOv4-Tiny模型波動(dòng)相比較而言輕微。綜上可以得出,YOLOv4-Tiny輕量化模型比YOLOv4-MobileNet系列輕量化模型、YOLOv4-Ghostnet輕量化模型、經(jīng)典YOLOv4模型在訓(xùn)練集和驗(yàn)證集上的識(shí)別率更高,完全迭代的次數(shù)更少,具有更強(qiáng)的魯棒性。
由表2可知,YOLOv4-Tiny輕量化模型的F1值略高于其余各個(gè)YOLOv4的輕量化模型(窄條斑病除外),YOLOv4-Tiny對(duì)4類(lèi)病蟲(chóng)害檢測(cè)目標(biāo)的F1平均值最高,為0.78,表明其綜合準(zhǔn)確率和召回率最好。
3.3 不同模型對(duì)水稻病蟲(chóng)害檢測(cè)效果
試驗(yàn)測(cè)試了各種不同的網(wǎng)絡(luò)模型在識(shí)別水稻病蟲(chóng)害圖像上的平均準(zhǔn)確率和模型權(quán)重大小以及每秒鐘傳輸?shù)膸瑪?shù),如表3所示。可以發(fā)現(xiàn),YOLOv4-Tiny的模型權(quán)重大小在僅為YOLOv4-Ghostnet一半的情況下,mAP值僅減少了1.17百分點(diǎn),并且每秒鐘的傳輸幀數(shù)增加了60.39,與YOLOv4-MobileNet系列和SSD-MobileNetV2相比,YOLOv4-Tiny的準(zhǔn)確率均有明顯提升,但權(quán)重大小是遠(yuǎn)遠(yuǎn)小于其余網(wǎng)絡(luò)的,這表明YOLOv4-Tiny網(wǎng)絡(luò)模型在保證了一定準(zhǔn)確率的前提下,較好地滿(mǎn)足了輕量化的需求。識(shí)別準(zhǔn)確率最低的是Faster-RCNN-Restnet50,僅為71%,SSD-VGG16的識(shí)別率最高,SSD網(wǎng)絡(luò)是Faster-RCNN和YOLO系列的結(jié)合版,其對(duì)尺度變化較大的物體圖像的泛化能力更好,采用多尺度特征圖進(jìn)行檢測(cè),可以根據(jù)圖像被檢測(cè)區(qū)域的大小在特征圖上每一點(diǎn)處選取不同長(zhǎng)寬比的選框,這一特點(diǎn)適合水稻病蟲(chóng)害區(qū)域形狀大小多變的特點(diǎn),提高識(shí)別的準(zhǔn)確率。但是SSD-MobileNetV2識(shí)別速度和準(zhǔn)確率都比YOLOv4-Tiny要低,綜合考慮,YOLOv4-Tiny在水稻病蟲(chóng)害圖像的識(shí)別中有更好的性能優(yōu)勢(shì)。
4 結(jié)論
本研究以水稻病蟲(chóng)害為研究對(duì)象,針對(duì)實(shí)際應(yīng)用中的水稻病蟲(chóng)害識(shí)別設(shè)備計(jì)算力和存儲(chǔ)力有限以及水稻病蟲(chóng)害需要快速、實(shí)時(shí)被識(shí)別的需求,建立了包括水稻白葉枯病、水稻窄條紋病、胡麻斑病以及稻瘟病等5種病害葉部圖像數(shù)據(jù)集,使用易于部署的輕量級(jí)YOLOv4-Tiny網(wǎng)絡(luò)對(duì)模型進(jìn)行微調(diào),結(jié)合遷移學(xué)習(xí)和卷積神經(jīng)網(wǎng)絡(luò)的訓(xùn)練技巧,將YOLOv4-Tiny與經(jīng)典的YOLOv4、Faster-RCNN、SSD 、YOLOv4-MobileNet系列、SSD-MobileNetV2以及YOLOv4-Ghostnet進(jìn)行了對(duì)比試驗(yàn),結(jié)果表明,與其余模型相比,YOLOv4-Tiny具有最佳的整體檢測(cè)性能,對(duì)水稻病蟲(chóng)害檢測(cè)的平均精度和F1平均值分別為81.79%和0.78,與YOLOv4-Ghostnet、YOLOv4-MobileNet系列相比都略高,權(quán)重大小僅為22.4 MB,YOLOv4的權(quán)重是YOLOv4-Tiny的10.89倍,雖然YOLOv4-Ghostnet的識(shí)別準(zhǔn)確率比YOLOv4-Tiny要高1.17百分點(diǎn),但其權(quán)重是YOLOv4-Tiny的近2倍,每秒傳輸幀數(shù)也不及YOLOv4-Tiny。綜上所述,基于YOLOv4-Tiny模型的水稻病蟲(chóng)害識(shí)別,具有權(quán)重小、準(zhǔn)確率高以及識(shí)別速度快的特點(diǎn),便于部署在機(jī)器上進(jìn)行實(shí)時(shí)檢測(cè),輕量便捷,各項(xiàng)性能具有較高的水平和魯棒性,可以為水稻病蟲(chóng)害識(shí)別在移動(dòng)端的良好應(yīng)用提供參考。
參考文獻(xiàn):
[1]王忠培,張 萌,董 偉,等. 基于遷移學(xué)習(xí)的多模型水稻病害識(shí)別方法研究[J]. 安徽農(nóng)業(yè)科學(xué),2021,49(20):236-242.
[2]鮑文霞,邱 翔,胡根生,等. 基于橢圓型度量學(xué)習(xí)空間變換的水稻蟲(chóng)害識(shí)別[J]. 華南理工大學(xué)學(xué)報(bào)(自然科學(xué)版),2020,48(10):136-144.
[3]范春全,何彬彬. 基于遷移學(xué)習(xí)的水稻病蟲(chóng)害識(shí)別[J]. 中國(guó)農(nóng)業(yè)信息,2020,32(2):36-44.
[4]王映龍,戴香糧. 圖像處理技術(shù)在水稻蟲(chóng)害系統(tǒng)中的應(yīng)用[J]. 微計(jì)算機(jī)信息,2007,23(26):274-275,256.
[5]姚 青,張 超,王 正,等. 分布式移動(dòng)農(nóng)業(yè)病蟲(chóng)害圖像采集與診斷系統(tǒng)設(shè)計(jì)與試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2017,33(增刊1):184-191.
[6]房若民,沈凱文,李浩偉. MobileNet算法的嵌入式農(nóng)業(yè)病蟲(chóng)害識(shí)別系統(tǒng)[J]. 單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2020,20(5):61-63.
[7]燕 斌,周 鵬,嚴(yán) 利. 基于遷移學(xué)習(xí)的小樣本農(nóng)作物病害識(shí)別[J]. 現(xiàn)代農(nóng)業(yè)科技,2019(6):87-89.
[8]蔣豐千,李 旸,余大為,等. 基于Caffe的生姜病害識(shí)別系統(tǒng)研究與設(shè)計(jì)[J]. 中國(guó)農(nóng)機(jī)化學(xué)報(bào),2019,40(1):126-131.
[9]蒲秀夫,寧 芊,雷印杰,等. 基于二值化卷積神經(jīng)網(wǎng)絡(luò)的農(nóng)業(yè)病蟲(chóng)害識(shí)別[J]. 中國(guó)農(nóng)機(jī)化學(xué)報(bào),2020,41(2):177-182.
[10]楊 穎,文小玲,章秀華. 基于方向梯度直方圖和局部二值模式混合特征的水稻病蟲(chóng)害識(shí)別方法研究[J]. 河南農(nóng)業(yè)大學(xué)學(xué)報(bào),2021,55(6):1089-1096.
[11]胡嘉沛,李 震,黃河清,等. 采用改進(jìn)YOLOv4-Tiny模型的柑橘木虱識(shí)別[J]. 農(nóng)業(yè)工程學(xué)報(bào),2021,37(17):197-203.
[12]權(quán)龍哲,夏福霖,姜 偉,等. 基于YOLO v4卷積神經(jīng)網(wǎng)絡(luò)的農(nóng)田苗草識(shí)別研究[J]. 東北農(nóng)業(yè)大學(xué)學(xué)報(bào),2021,52(7):89-98.
[13]王立舒,秦銘霞,雷潔雅,等. 基于改進(jìn)YOLOv4-Tiny的藍(lán)莓成熟度識(shí)別方法[J]. 農(nóng)業(yè)工程學(xué)報(bào),2021,37(18):170-178.
[14]東 輝,陳鑫凱,孫 浩,等. 基于改進(jìn)YOLOv4和圖像處理的蔬菜田雜草檢測(cè)[J]. 圖學(xué)學(xué)報(bào),2022,43(4):559-569.
[15]鐘志峰,夏一帆,周冬平,等. 基于改進(jìn)YOLOv4的輕量化目標(biāo)檢測(cè)算法[J]. 計(jì)算機(jī)應(yīng)用,2022,42(7):2201-2209.
[16]趙家琪,高 貴,黃曉峰,等. 一種改進(jìn)的YOLOv4-tiny車(chē)輛目標(biāo)檢測(cè)方法[J]. 電子產(chǎn)品世界,2021,28(9):39-43.
[17]嚴(yán)開(kāi)忠,馬國(guó)梁,許立松,等. 基于改進(jìn)YOLOv3的機(jī)載平臺(tái)目標(biāo)檢測(cè)算法[J]. 電光與控制,2021,28(5):70-74.
[18]楊蜀秦,劉楊啟航,王 振,等. 基于融合坐標(biāo)信息的改進(jìn)YOLO V4模型識(shí)別奶牛面部[J]. 農(nóng)業(yè)工程學(xué)報(bào),2021,37(15):129-135.
[19]Xiao Z T,Yin K,Geng L,et al. Pest identification via hyperspectral image and deep learning[J]. Signal,Image and Video Processing,2022,16(4):873-880.
[20]Liu Y W,Zhang X,Gao Y X,et al. Improved CNN method for crop pest identification based on transfer learning[J]. Computational Intelligence and Neuroscience,2022,2022:9709648.
[21]王明吉,陳秋夢(mèng),任福深,等. 基于yolov4的垃圾檢測(cè)系統(tǒng)[J]. 工業(yè)儀表與自動(dòng)化裝置,2021(5):20-23,72.
- 江蘇農(nóng)業(yè)科學(xué)的其它文章
- 長(zhǎng)三角農(nóng)業(yè)文化遺產(chǎn)的文化景觀基因及其設(shè)計(jì)利用
- 數(shù)字金融與農(nóng)業(yè)高質(zhì)量發(fā)展耦合協(xié)調(diào)評(píng)價(jià)
- 改良劑對(duì)酸性植煙土壤化學(xué)性質(zhì)、細(xì)菌群落結(jié)構(gòu)和豐度的影響
- 黑麥草和苕子混合翻壓還田對(duì)土壤酶活性和養(yǎng)分的短期影響
- 軸流氣吸式排種器的設(shè)計(jì)與試驗(yàn)
- 不同濃度新型液態(tài)調(diào)理劑對(duì)土壤生物特性、有機(jī)碳及其組分的影響