基于神經網絡逆模型的污水pH 值內模控制策略
2023-12-26 07:23:46鮑立昌章家巖馮旭剛王正兵魏新源
重慶大學學報 2023年12期
王 勝,鮑立昌,章家巖,馮旭剛,徐 帥,王正兵,魏新源
(安徽工業大學 電氣與信息工程學院,安徽 馬鞍山 243032)
中國水資源嚴重短缺,人均水資源占有量僅為世界平均水平的1/4,因此,加強污水治理和循環利用對于保護水資源和實現可持續發展具有重要意義[1-3]。在工業污水處理過程中,酸堿度(pH 值)的控制是非常重要的環節,保證精準控制,是污水處理后續工藝流程安全可靠運行以及水質達標的前提條件。然而在污水處理過程中,當pH 值在中和點附近時,中和反應呈現高度敏感性,加入微量的中和劑就會引起pH 值的大幅跳變,且中和反應過程易受環境、溫度、生物發酵等多方面不確定因素的干擾[4-5],所以對pH 值進行控制是污水處理行業的一項技術難題[6]。
pH 值調節過程涉及的化學反應機理主要是酸堿中和反應。近些年對酸堿中和反應pH 值控制的研究引起了學者關注。Mota 等[6-7]提出了應用自適應神經模糊推理系統架構建立代表酸堿中和過程的預測模型,并根據神經網絡準確性和復雜性相互矛盾的準則,將pH 中和過程表示為多目標優化問題。但由于神經網絡輸出和節點權值映射間存在非線性,導致系統局部極小值問題未得到解決。Zhang 等[8]將未建模動態的數據驅動補償與多步超前最優控制相結合,采用了一種新的PID 控制方案應用于紙漿中和過程的pH 值控制。在這種新的PID 控制方法中,中和過程的實時測量數據和歷史數據得到了充分應用。但是動態歷史數據庫的更新存在一定滯后,使系統很難達到實時在線控制的要求。Vatankhah 等[9-11]將非線性預測控制應用于pH 的中和過程研究中,在數學模型的基礎上搭建了神經網絡預測模型并融入粒子群算法,解決了BP 神經網絡局部最優的難題。但由于該神經網絡的訓練樣本數據量較大,待尋優參數多,導致系統的收斂速度較慢。
綜上所述,雖然已有一些方法對中和反應的pH 值控制進行研究,但未能有效解決系統的強干擾和模型參數易變問題。為此,筆者提出基于內模控制和神經網絡逆模型相結合的優化控制策略,設計濾波器提高系統魯棒性,在MATLAB 仿真驗證的基礎上,以火力發電鍋爐沖渣除灰循環水處理系統為對象進行實際應用,達到了較好應用效果。
1 pH 中和反應機理建模
工業污水處理過程中,中和劑的添加量是控制pH 值的關鍵因素。工程上通常依據物質守恒定律和化學平衡定律,采用連續攪拌反應釜系統(continuously stirred tank reactor,CSTR)的pH 中和過程作為研究對象的動態模型[12-13]。
連續攪拌反應釜系統如圖1 所示,當流入反應池的污水呈酸性時,用堿性中和劑調節其pH 值;當流入反應池的污水呈堿性時,用酸性中和劑調節其pH 值。為方便闡述pH 中和反應機理,設流入反應池的污水呈堿性,對應去用酸性中和劑調節其pH 值。圖中F1、F2分別為酸性中和劑的流量和堿性污水的流量,其濃度分別為C1、C2,Xa為流出酸的總濃度,Xb為流出堿的總濃度,V為連續攪拌反應釜中溶液的體積,n為攪拌機轉速。

圖1 連續攪拌反應釜系統Fig. 1 Continuous Stirred Reactor System
設定的CSTR 中處處等溫且物料完全混合,排除其他生物或物理化學作用對pH 的影響,則整個反應釜系統中堿的變化量等于污水流入反應釜中堿的總量和反應釜中流出的堿的總量之差,酸的變化量等于向反應釜中所添加的中和劑中的酸總量與反應釜中流出的酸總量之差。即有
整個系統中,酸性中和劑的流量F1即為操縱量u,污水pH 值作為系統的輸出(即被控變量),中和劑的濃度C1為系統的擾動量,結合式(1)和式(2)可得出系統的動態控制模型如下
令y=Xa-Xb,可以將式(3)簡化為
被控對象的模型可以近似離散化為
至此可得處理后污水pH 值
式(5)、(6)中:T為采樣周期(s);d(k)為系統干擾;Kw= 10-14為純水在25 ℃下的電離平衡常數。
2 神經網絡內模控制方案設計
根據污水處理系統pH 值的控制要求,設計了圖2 所示的控制方案。基本環節由正向模型、逆向模型、濾波器和時延模塊等部分組成。其中,正向模型和逆向模型由RBF 神經網絡辨識實現,逆向模型通過內模控制器來實現pH 值被控對象的逆,有效解決pH 值控制系統的強干擾問題。圖中選擇中和劑的流量u作為操作變量,反應釜對象的pH 值變量作為被控變量y,TDL 為神經網絡采集數據的時延模塊,濾波器能提高控制系統的魯棒性。下面將分別對RBF 神經網絡正、逆向模型辨識和內模控制器進行設計,并將二者有機結合,實現污水處理pH 值的優化控制策略[14]。
2.1 正、逆向模型的建立
模型辨識是識別被控對象輸入輸出之間關系的動態特性[14],為了提高內模控制系統中正向模型的精確度,并使內模控制器盡可能接近正向模型的逆模型,采用神經網絡的方法對內模控制系統的正向模型和控制器模型進行正、逆模型辨識。模型辨識的結構如圖3 所示。

圖3 正、逆向模型辨識結構Fig. 3 Identification structure of forward and reverse models
神經網絡辨識的pH 值非線性被控對象用非線性離散差分方程可以表示為
式中:n是輸出時滯;m是輸入時滯;u是對象輸入;y是對象輸出。假設RBF 的多輸入向量為
則RBF 網絡中高斯基函數zi(第i個隱節點的輸出)為
式中:Ci為網絡第i個節點的中心向量;ri為網絡基寬向量中的第i個值;p為隱節點個數。
RBF 網絡的輸出為
其中:wi是網絡隱層到輸出層的權值;M是網絡輸出節點的個數。
并定義目標函數
在內模控制正向模型的建立過程中,采用u(k- 2),u(k- 3),u(k- 4),y(k- 1)和y(k- 2)作為RBF 神經網絡的輸入,ym(k)作為RBF 神經網絡的輸出。通過最小化目標函數來不斷修正RBF 網絡中的連接權值,使得正向模型的輸出ym不斷逼近實際輸出y,從而實現正向模型的辨識。
逆向模型的訓練結構除輸入輸出外,其余和正向模型相同。在逆向模型的建立過程中,采用u(k- 4),u(k- 3),r(k- 1),r(k- 2)和r(k- 3)作為RBF 神經網絡的輸入,?(k)作為RBF 神經網絡的輸出。利用設定值r(k)和正向模型輸出ym(k)的差值e2來修正RBF 網絡的連接權值,使得逆向模型的輸出?(k)逐漸逼近被控對象的實際輸入u(k),實現逆向模型的動態辨識。
2.2 pH 值內模控制架構
內模控制建立在被控對象正、逆向模型的基礎上,把被控對象和它的近似數學模型并聯,取數學模型輸出與實際對象輸出的差值作為誤差信號,反饋到內模控制器的輸入端,并通過濾波器來抑制控制系統受到干擾或模型參數變化時出現的反饋量波動。內模控制架構框圖如圖4 所示。

圖4 內模控制架構Fig. 4 Internal Mode Control Architecture
圖4 中,r(s)為系統的輸入(污水處理設定的pH 值),y(s)為系統的輸出,G(s)為污水pH 值被控對象,C(s)是內模控制器,Gn(s)是被控對象模型,d(s)為干擾,Gf(s)為濾波器。
圖4 虛線框內結構的傳遞函數簡記為GF(s)
則整個系統中輸入r(s)與輸出,干擾d(s)與輸出之間相互獨立,傳遞函數如下
通過內模控制架構可以得出系統的輸出y(s)為
由式(13)可知,在pH 值被控對象數學模型精確且存在逆模型的情況下,即
此時系統的輸出能夠跟隨系統的輸入值,且不受到任何干擾的影響
2.3 基于RBF 神經網絡的內模控制器設計
針對圖2,由式(4)和pH 中和反應的大滯后性可知被控對象G為1 階時延的非線性系統,將式(5)被控對象的離散化模型簡寫成
式中:y為系統的輸出;u為系統的輸入;n和m分別是輸出時滯和輸入時滯。
1)G的模型Gn
G的模型Gn由RBF 神經網絡采用并聯結構辨識得到
2)神經網絡內模控制器設計
由逆向模型辨識可知,可逆且為1 階時延的非線性系統G,它的逆模型由RBF 神經 網 絡的串-并 聯 結構實現。根據式(15),逆模型的輸出為
此時,內模控制器C是對象G的逆模型Gn-1,濾波器Gf的輸出f即為C的輸入,將
代入,可得到內模控制器C為
3)濾波器設計
雖然希望設計控制器的被控對象模型與實際對象模型盡可能相似,但現實情況中系統運行時模型不匹配和擾動往往是存在的,從而導致正向模型和實際對象模型存在一定誤差。考慮到內模控制器的可實現性,在進行控制器設計時內模控制器C則是被控對象G的最小相位特征部分的逆模型[15]。為了提高系統魯棒性,可在控制器前端加入低通濾波器Gf,選取簡單有效的一階濾波器
其離散形式為
式中,h為濾波器的可調時間常數,也是內模控制器的唯一參數,可以通過調節h增強控制系統的穩定性和魯棒性,h越大,系統魯棒性和穩定性越好,但是系統響應會減慢。
4)系統分析
理想情況下,C=Gn-1,則GG=z且G=Gn,圖2 所示系統pH 值控制方案的閉環z傳遞函數為
此時系統相當于開環。
濾波器輸出為
把式(18)代入上式可得
至此,濾波器的輸出f所對應的z變換為
其中,ym(z)表示pH 值被控對象G輸出上一步的預報值,從而對象的輸出時滯得到了一定的補償。
3 仿真分析
污水處理中和反應過程類似于強酸強堿反應系統,采用式(5)的近似化離散模型作為被控對象的模型,利用MATLAB 軟件進行運算仿真,系統參數值的選擇如表1 所示,pH 設定值為7.5。

表1 過程對象模型參數Tab.1 Process object model parameters
1)RBF 神經網絡訓練仿真。在確定對象模型基礎上首先對正向模型進行RBF 訓練,要求訓練精度達到0.000 1,然后再進行逆向模型訓練。RBF 網絡權值及高斯函數參數權值的初始值均取[-1,1]間的隨機值,學習速率為0.1,加載樣本數據后,正向和逆向模型的網絡訓練誤差如圖5 所示。從圖中可以看出,正向模型和逆向模型分別在訓練到第135 次和第98 次時誤差達到了0.000 1 級別精度,說明設計的RBF 正向模型和逆向模型的訓練效果和收斂效果都很好,誤差下降也很快。

圖5 正向和逆向模型訓練誤差圖Fig. 5 Training Error Diagram of Forward and Reverse Models
2)內模控制器選取參數仿真。神經網絡內模控制采用一階濾波器Gf(s),h是內模控制的
唯一參數,分別取h= 0.6,h= 0.8,h= 1.0,控制系統的階躍響應如圖6 所示。
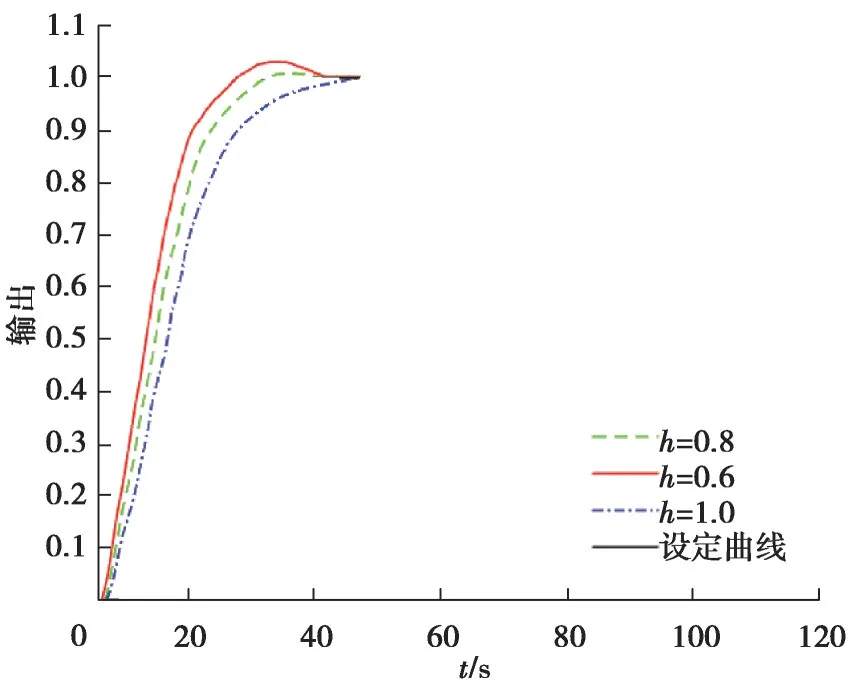
圖6 不同濾波器參數下系統響應Fig. 6 System response under different filterparameters
從圖中可以看出,h越大,系統穩定性越好,但是響應越慢,h過小,易引起模型參數變化時系統超調過大,在系統穩定性和響應速度之間做折中,設計取h= 0.8。
3)優化控制策略抗干擾仿真。在常規PID 控制系統中,根據工程經驗值以及多次調參可得PID 參數為KP=0.56,KI=248,KD=74。為驗證優化控制策略的抗干擾效果,在系統運行到180 s 時加入幅值為20%的階躍擾動信號,比較帶濾波器的神經內模控制策略、不帶濾波器的神經內模控制策略和常規PID 控制策略的抗干擾性能,其中,3 種控制策略下階躍擾動信號的時長均取30 s,結果如圖7 所示。從圖7 可看出:擾動信號加入后,帶濾波器的神經內模控制策略超調量為14.7%,調節時間為70.2 s;不帶濾波器的神經內模控制策略超調量為22.7%,調節時間為88.3 s;常規PID 控制策略超調量為28.5%,調節時間為86.1s。由此可知,帶濾波器的神經內模控制策略抗干擾能力明顯優于不帶濾波器的神經內模控制策略和常規PID 控制策略。

圖7 3 種控制策略擾動仿真波形Fig. 7 3 kinds of control strategy disturbance simulation waveform
4)多設定值仿真。污水處理pH 值控制要求系統在不同設定值下都具有良好的控制性能,將系統設定值分別取為7.5、6 和9,比較常規PID 控制策略、不帶濾波器的神經內模控制策略和帶濾波器的神經內模控制策略的動態響應特性,結果如圖8 所示。從圖8 可以看出:當設定值為7.5 時,3 種控制策略下超調量分別為21.3%、12.1%和3.3%,調節時間分別為70.2 s、67.3 s 和54.7 s;設定值從7.5 跳變為6 時,3 種控制策略下的超調量分別為5.8%、3.2%和0.8%,調節時間分別為49.4 s、44.3 s 和40.7 s;設定值從6 跳變為9 時,3 種控制策略下的超調量分別為7.8%、3.9%和1.7%,調節時間分別為59.6 s、50.1 s 和42.5 s。上述分析說明帶濾波器的神經內模控制策略在不同設定值下的動態響應性能均優于不帶濾波器的神經內模控制策略和常規PID 控制策略。

圖8 3 種控制策略多設定值仿真波形Fig. 8 multi-setting value simulation waveform under 3 kinds of control strategies
5)系統魯棒性仿真。在表1 對象模型參數(實驗參數一)仿真的基礎上,將C1和C2分為調整為0.04 mol/L 和0.8 mol/L(實驗參數二)進行仿真以驗證模型參數變化時系統的魯棒性,如圖9-10 所示。從圖9 可看出:在實驗參數一下,帶濾波器的神經內模控制策略超調量為9.3%,調節時間為51.6 s;不帶濾波器的神經內模控制策略超調量為14.7%,調節時間為129.1 s;常規PID 控制策略超調量為26.7%,調節時間為165.2 s。從圖10 可看出:在實驗參數二下,帶濾波器的神經內模控制策略超調量為9.1%,調節時間為54.2 s;不帶濾波器的神經內模控制策略超調量為17.3%,調節時間為200.3 s;常規PID 控制策略超調量為26.4%,調節時間為218.9 s。以上分析表明帶濾波器的神經內模控制策略在模型參數變化時具有更強的魯棒性。

圖9 實驗參數一下的3 種控制策略仿真波形Fig. 9 3 kinds of control strategy simulation waveforms
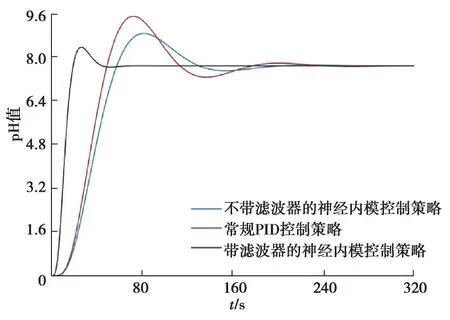
圖10 實驗參數二下的3 種控制策略仿真波形Fig. 10 3 kinds of control strategy simulation waveforms
4 工程應用
為檢驗系統實際應用效果,將研究提出的神經網絡內模控制策略應用于某電廠300 MW 火電機組燃煤發電鍋爐沖渣除灰循環水處理系統。在該處理系統中,堿性沖灰水經過初步過濾凈化后流入灰壩房的反應池內進行中和反應,反應池內pH 計實時檢測污水的pH 值,神經網絡內模控制器利用檢測到的pH 值及污水流量計算出中和劑酸的流量,進而控制中和劑的流量閥。系統設計以生產管理層作為中央操作站,邏輯控制層采用s7-300PLC 作為控制器,對現場采集到的數據進行處理,生產現場層負責污水處理過程中現場信號的采集和輸出,操作監控層則負責整個系統運行狀況的監控、控制參數的給定或調整以及系統運行信息的記錄等功能。整個控制系統拓撲結構如圖11 所示。

圖11 控制系統結構圖Fig. 11 Control System Structure Diagram
圖12、13 是1 h 內分別采用常規PID 控制策略和神經網絡內模控制策略的pH 值實時曲線。由圖12、13可以看出,采用常規PID 控制的pH 值大致穩定在7.5 左右,波動范圍在[-0.3 0.3]之間。而采用神經網絡內模控制策略的pH 值波動范圍在[-0.2 0.2]之間,系統穩態特性得到較大改善。為驗證神經網絡內模控制策略的抗干擾性能,分別在2 種控制策略下人為施加10%的階躍干擾,由曲線圖可知,當系統受到干擾時,常規PID控制系統的超調量為14.2%,神經網絡內模控制系統的超調量為9.3%,系統波動所帶來的超調量比常規PID控制方式小。由上述分析可以得出,采用神經網絡內模控制可以提高pH 值的控制精度,并具有較強抑制干擾能力,可進一步提高發電鍋爐工業污水pH 值控制的準確性和抗干擾性。

圖12 pH 值的PID 控制實時曲線Fig. 12 pH value real-time curve of PID control
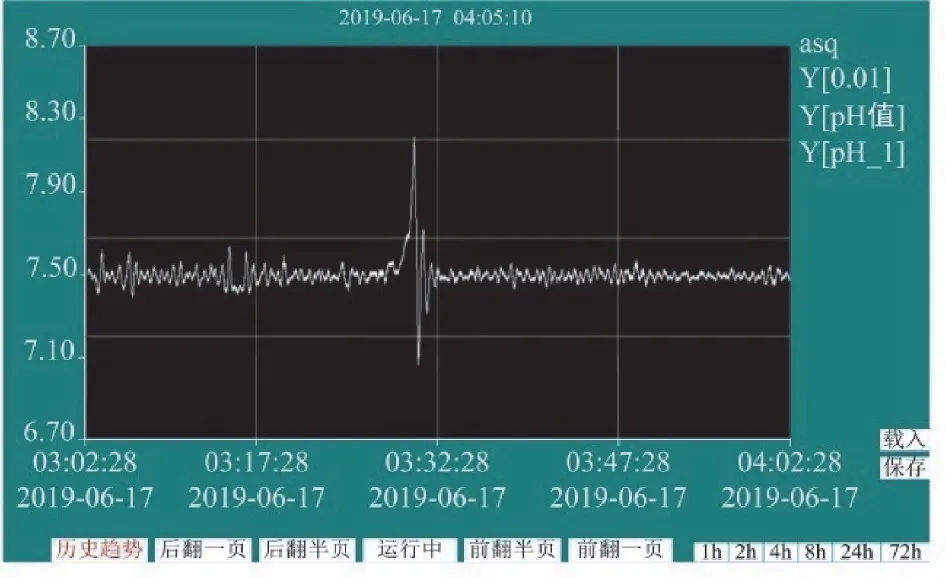
圖13 pH 值的神經網絡內模控制實時曲線Fig. 13 Real-time curve of pH value neural network internal model control
5 結論
針對污水處理過程中pH 值控制的強干擾、模型參數易變等問題,設計了基于神經網絡逆模型的內模控制優化方案。該方案采用RBF 神經網絡實現對被控對象正向模型和逆向模型的辨識,此時內模控制策略的輸出緊跟系統的輸入,不受任何干擾影響,通過在系統中插入低通濾波器來提高對象模型參數變化時系統的魯棒性。仿真結果表明:和常規PID 控制及不帶濾波器的神經內模控制策略相比,研究所提出的控制策略具有更強的魯棒性和抗干擾能力。工程應用表明:采用研究控制策略后,pH 值控制偏差在±0.2 以內,有效提高污水處理過程中pH 值控制的精度和系統穩定性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45