無人機自動化巡檢技術在光伏電站中的應用
2023-12-29 02:23:54夏德喜劉浩滿
太陽能 2023年12期
夏德喜,劉浩滿,蘆 璐
(國電聯合動力技術有限公司,北京 100039)
0 引言
隨著化石能源逐漸匱乏,在倡導低碳經濟和可持續發展的大背景下,可再生能源越來越受到各界的重視,太陽能是可再生能源中最具有代表性的能源類型之一,而光伏發電為重要的太陽能利用方式。從2008 年開始,光伏行業步入大眾視野,并在國家的大力扶持下進入了迅速發展時期。據國家能源局統計,截至2022 年底,中國累計并網光伏發電量為39204 萬kWh,其中,集中式光伏發電量為23442 萬kWh,分布式光伏發電量為15762 萬kWh[1]。隨著光伏行業的飛速壯大,光伏發電量成為衡量光伏電站收益的關鍵指標,而運維在提升光伏電站發電效率、降低平準化度電成本方面發揮著越來越重要的作用,如何提高電能質量和運維管理效率,是光伏電站亟待解決的難題。為了增加光伏電站的發電效率,必須保證光伏組件的故障率處于極低水平,這就需要及時判斷光伏組件是否存在故障,并進行及時處理。
目前,根據應用場景不同,中國的光伏電站主要分為以下幾種:
1)地面光伏電站。此類光伏電站多建于平原地區,且通常占地面積較大,人工巡檢時存在耗時耗力的情況。
2)山地光伏電站。此類光伏電站建于山地、丘陵等地,海拔較高,地勢較為復雜,且電站所在地的環境較為復雜,秋、冬季節易出現路面結冰情況,導致此類光伏電站運維時設備運輸及人工檢查均較為困難,而采用無人機(UAV)進行巡檢將給此類光伏電站檢測帶來極大方便。
3)沙漠戈壁光伏電站。沙漠、戈壁地區人口少,人工費用高,且此類地區氣候條件惡劣,日較差大。如果光伏組件長期暴曬和暴露在風沙環境中,其故障率會大幅增加,因此,此類光伏電站的高效運維成為亟待解決的問題。
4)漁光互補或農光互補光伏電站。此類光伏電站是將光伏發電與漁業、農業、水產養殖等相結合,屬于土地集約型利用方式。但此類應用形式為電站后續運維增加了難度。
5)海上漂浮式光伏電站。此類光伏電站中光伏組件是架設在海面的浮體之上,海上隨時會有大浪,而巡檢人員需要乘船舶進行光伏電站的維護和保養,危險程度較高,因此迫切需要無人巡檢的解決方案。
6)屋頂分布式光伏電站。此類光伏電站中光伏組件大部分布置在居民房屋、工廠廠房、公園設施等的屋頂上,較為分散,需要運維人員上屋頂進行檢修和維護,存在危險性且工作效率較低。
綜上可知,如何提升光伏電站的巡檢效率成為光伏電站運維時的重中之重,特別是山地光伏電站和海上漂浮式光伏電站,人工巡檢難度極大。由于此類光伏電站的巡檢路線比較復雜,不僅巡檢效率極低,還會給運維人員的人身安全帶來威脅,同時對運維人員的專業能力及職業素養也有極高要求。運維人員需要在短時間內對發現的故障點做出等級判斷,提出相應的維護建議,并需對故障點進行標記,方便后續的維修及復查。因此,尋找安全、高效的運維方式是各類光伏電站均面臨的問題。
當前,影響光伏電站發電量的主要因素集中在光伏組件本身存在的隱裂、二極管擊穿、熱斑效應等方面,但人工巡檢過程中無法實時對每塊光伏組件的運行狀況進行監測,且光伏組件出現故障后又不易被人工發現,而無人機的應用可以依托相關網站提供的地形圖形成合適的巡檢途徑,再利用無人機搭載的雙光相機(可見光和紅外熱成像鏡頭)實現高效、安全的大范圍光伏組件影像收集,光伏組件的大部分缺陷可以通過紅外熱成像鏡頭圖像來顯示。本文通過無人機搭載雙光相機對光伏電站中的光伏組件區域進行自動化巡檢,利用圖像自動識別技術查找存在問題的光伏組件,并以40 MW 地面光伏電站為例對比無人機自動化巡檢與人工巡檢的效率。
1 技術創新
1.1 無人機控制技術的應用
將飛行控制技術應用于無人機,多軸無人機的飛行、懸停、姿態變化等均是由多種傳感器將無人機本身的姿態數據傳回飛行控制系統,再由飛行控制系統通過運算和判斷發出指令,執行器接收指令后完成動作或飛行姿勢的調整[2]。此飛行控制系統可以理解成無人機的中央處理器(CPU),其主要功能是發送各種命令并處理返回的各塊光伏組件數據。飛行控制系統最基本的功能是控制無人機在空中飛行時的平衡,這種平衡由慣性測量單元(IMU)測量,IMU 通過感知無人機當前的傾斜度數據,由編譯器編譯成電子信號,然后將該信號傳輸給飛行控制系統的單片機[2]。單片機根據當前數據,計算出補償方向、補償角,并將這些補償數據編譯成電子信號,發送到被管理的舵機或電機,舵機或電機執行命令完成補償工作,在傳感器感知到無人機平衡穩定后,將實時數據發送給單片機,單片機就會停止補償信號,從而形成一個循環[2]。大多數人認為這是飛行控制系統最基本的功能。如果沒有該功能,在角度傾斜時,無人機就會失去平衡,發生事故。增加全球定位系統(GPS)后可實時知道無人機的當前位置,然后預先確定無人機的工作路徑,再通過數字傳送鏈接實時傳送無人機的當前狀態,保證無人機圓滿完成任務[3]。
1.2 雙光相機在光伏電站巡檢中的應用
通過光伏組件的熱斑效應檢測光伏組件缺陷至關重要,在光伏組件制造、運輸過程中可能會出現碎裂、焊接不良等情況;在使用過程中,光伏組件會被鳥糞、樹蔭等物體遮擋,被遮擋的光伏組件將會出現發熱情況,這會對其造成嚴重破壞,極大降低光伏組件的發電效率。利用紅外熱成像方式將大幅提升光伏電站巡檢工作的效率。紅外熱成像的原理是將被測物體的表面溫度熱成像,被測物體的紅外輻射線被光學成像鏡接收后通過光柵反映到紅外熱成像儀的光敏元器件上,從而轉變為肉眼清晰可見的熱成像圖,這種熱成像圖與被測物體表面的熱分布場對應,其原理圖如圖1 所示。
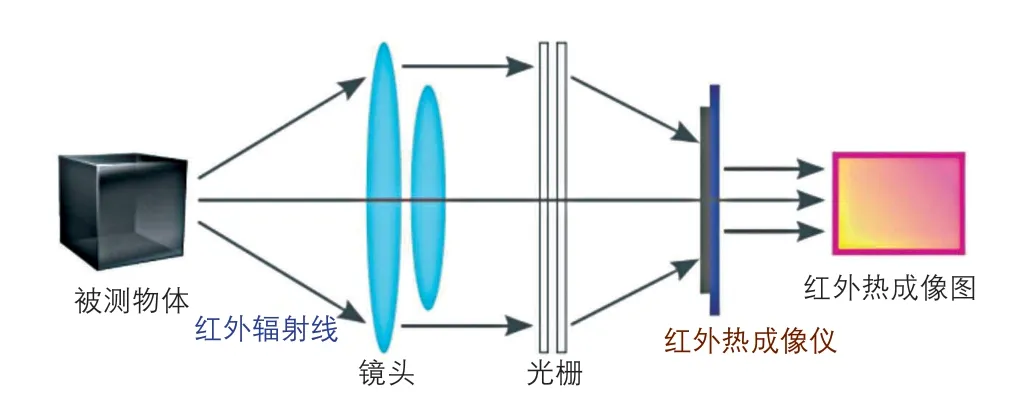
圖1 紅外熱成像原理圖Fig.1 Principle diagram of infrared thermal imaging
但根據實際情況,由于被測物體各部分紅外輻射能量的熱成像分布圖信號非常弱,導致熱成像分布圖缺少立體和層次感,所以在實際使用過程中常采用一些輔助措施來增加儀器的實用功能,使其更有效地判斷被測物體的紅外熱分布場,比如:控制圖像的對比度及亮度、實標校正、進行偽色彩圖像處理等。從本質上來說,紅外熱成像儀就是將物體發出的紅外輻射能量轉變為可見的代表被測物體表面溫度分布的熱成像圖。熱成像圖上顯示的顏色代表被測物體的不同溫度,通過查看熱成像圖可以觀察到被測目標的整體溫度分布狀況,從而進行被測物體發熱情況的研究[4]。
在無人機上搭載紅外熱成像鏡頭后,可采集光伏組件表面的熱成像圖,然后在相同視角下拍攝當前光伏組件的可見光照片,將二者進行比對,確定光伏組件缺陷類型。熱成像圖與可見光圖對比下發現的導致光伏組件缺陷的因素如表1 所示。
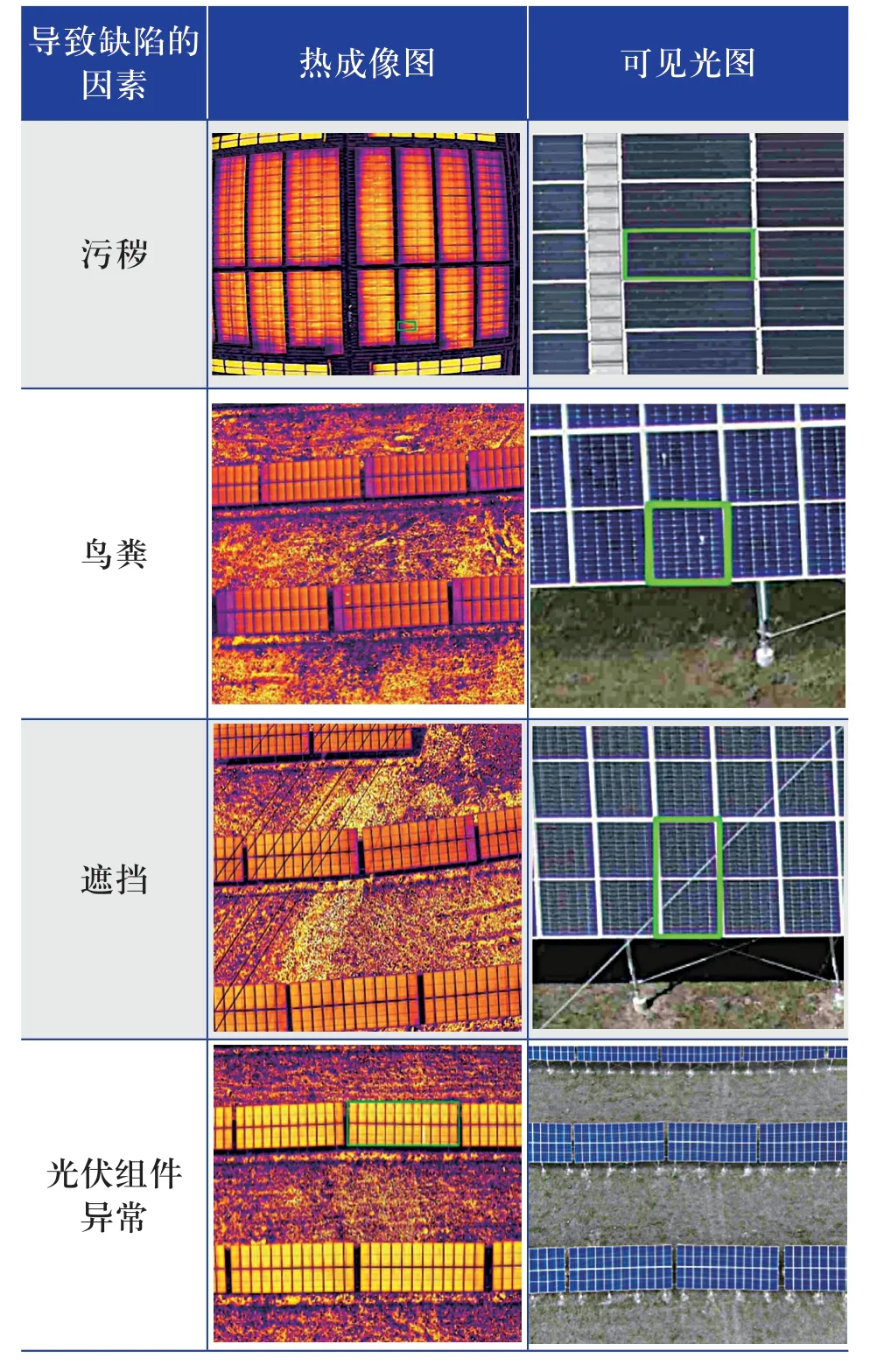
表1 熱成像圖與可見光圖對比下發現的導致光伏組件缺陷的因素Table 1 Factors leading to defects in PV modules found in comparing thermal imaging images with visible light images
1.3 基于圖像的光伏組件缺陷精準定位技術
1.3.1 定位定向系統(POS)在空中三角測量法中的應用
依托慣性導航技術和全球定位技術的快速發展,POS 由IMU 和差分全球定位系統(DGPS)搭配組成,其能捕捉攝站的姿態信息和三維坐標。無人機能夠有效實現在POS 輔助下的空中三角測量,同時減少對地面控制點的依賴。對采用本方法后的檢測點航拍圖像進行驗證,結果顯示,檢測點的平面平均誤差約為 12 cm[5]。
通過對巡檢區域高空90°視角進行圖像采集,得到相應圖像并完成拼接,最終得到光伏場區的完整正射矢量圖。
1.3.2 圖像定位技術
根據雙光相機獲取的圖像或視頻來確定特定對象或元素在某個坐標系下位置的過程即為圖像定位。基于雙光相機的圖像定位流程圖如圖2 所示。圖中:SLAM 為同步定位與地圖繪制。
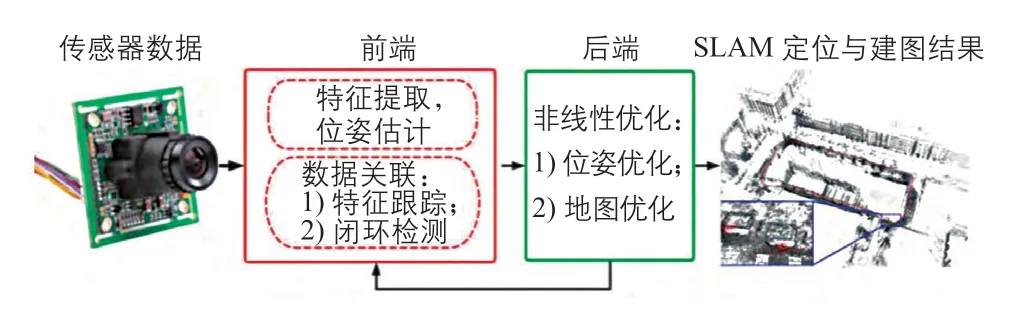
圖2 基于雙光相機的圖像定位流程圖Fig.2 Image localization flowchart based on dual light cameras
由圖2 可知,前端對傳感器數據進行實時處理,并利用后端非線性優化方法對地圖上激光雷達點云數據進行實時優化,從而獲得被測對象或元素的位置。
1.4 缺陷識別
光伏巡檢缺陷識別系統是一款為光伏電站巡檢缺陷識別專門研發的具有智能分析算法的高性能應用軟件,其包含熱成像圖背景分割技術、特征提取與匹配技術、智能圖像識別和DGPS 等幾項關鍵核心技術,可一鍵批量化處理采集的圖像信息,操作簡單,處理問題效率高、準確率高。
采用該系統的無人機在工作時對整個光伏電站進行高精度航測,生成帶DGPS 技術的電子地圖,可對此電子地圖上的光伏組件進行邏輯位置標定。無人機每次作業時搭載雙光相機進行巡檢,將采集到的圖像通過智能分析軟件進行批量處理,自動識別熱斑、零電流等光伏組件故障,并在電子地圖中生成高精度的故障光伏組件位置坐標,輸出用戶報告,指引用戶完成故障光伏組件的準確定位,最終完成故障消除。光伏巡檢缺陷識別系統中缺陷識別的邏輯圖如圖3 所示。
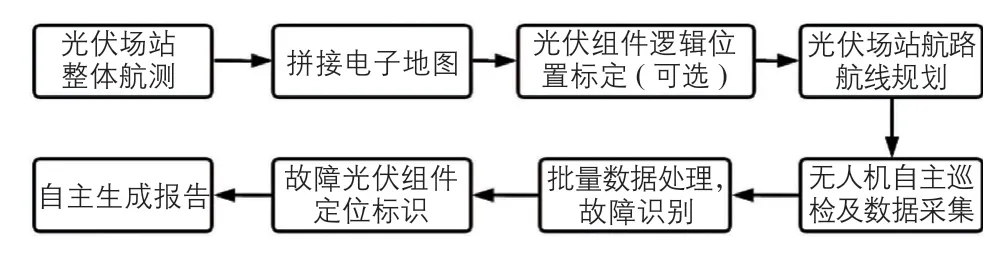
圖3 光伏巡檢缺陷識別系統中缺陷識別的邏輯圖Fig.3 Logic diagram of defect recognition in PV inspection defect recognition system
光伏巡檢缺陷識別系統的智能分析算法具有以下優勢:
1)針對噪聲,智能分析算法采用 NL-Means算法,其可對整幅圖像去噪,利用圖像塊及鄰域像素值的相似性,對檢測出的圖像相應區域進行加權后平均,圖像中存在的高斯噪聲將被有效去除。
2)針對圖像增強,智能分析算法采用多尺度圖像金字塔增強技術,在抑制噪聲的同時,在不同尺度上進行圖像殘差細節的放大,再逐層累積疊加,從而達到圖像增強的目的。
3)針對智能分割,智能分析算法通過直線提取(LSD)算法和大津(OTSU)算法將紅外熱成像的區域性和直線檢測相結合,以此分割出真實的光伏組件區域,過濾無關目標。
4)針對智能檢測,智能分析算法采用卷積神經網絡(CNN)來實現光伏組件異常情況的自動識別,通過熱成像圖中不同的熱斑形式來判斷異常的種類,可實現對光伏組件零電流、熱斑、光伏組件缺失等異常情況的判定。
光伏巡檢缺陷識別系統的智能分析算法流程圖如圖4 所示。
將理論模型中參數賦值后即可模擬目標價格變動對市場均衡及社會福利的影響。上述理論模型涉及9個參數,其中3個參數需要使用計量經濟學方法估計獲得,分別是試點區和非試點區供給彈性以及替代彈性,本文將借鑒前人的研究結果,其他6個參數可以根據變量的初始值計算獲得(見表2)。
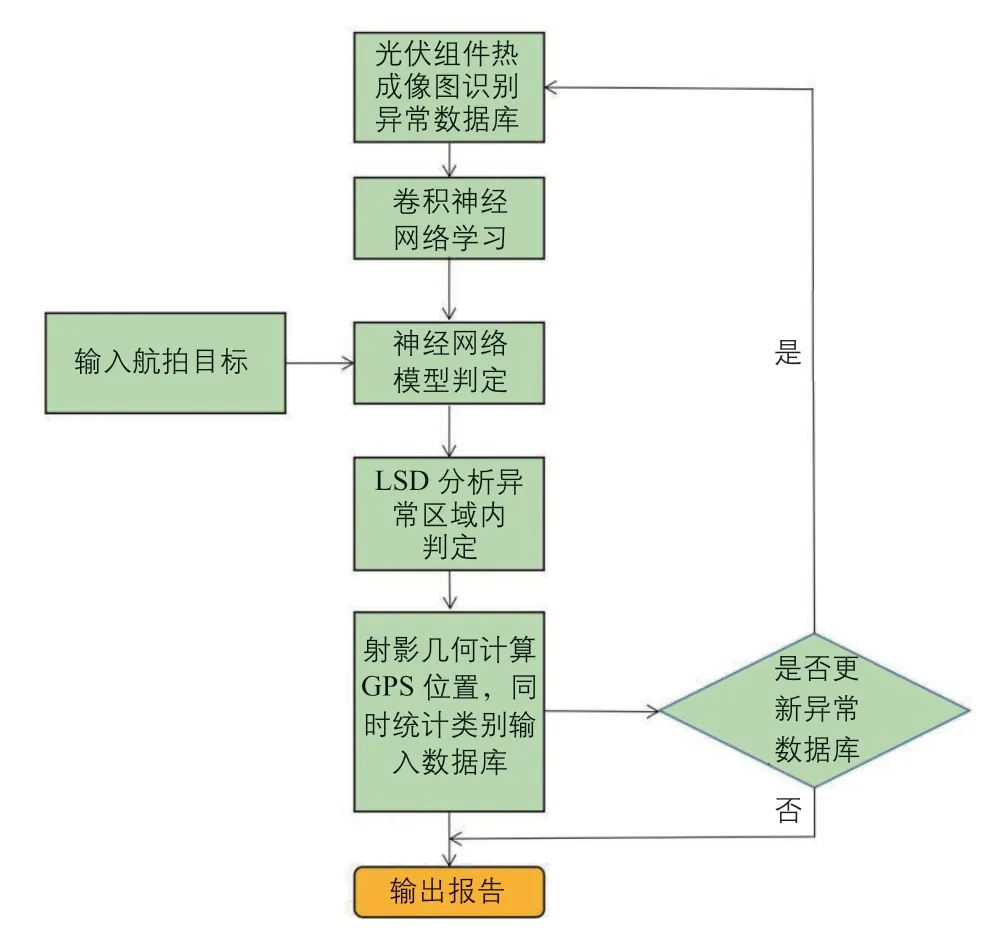
圖4 光伏巡檢缺陷識別系統的智能分析算法流程圖Fig.4 Intelligent analysis algorithm flowchart of PV inspection defect recognition system
由于航拍圖像的復雜性,處理并獲取整幅航拍圖像的全局特征通常并不能準確表達圖像中所含有的具體內容。因此,可以利用CNN 的特征自提取方式,在獲取基本特征分析后,再進行圖像分類和區域分析。
神經網絡的深度學習主要用于層次性分析航拍圖像不同層特征之間的聯系和不同層特征的提取,光伏巡檢缺陷識別系統的機器分類器能夠自動地從底層特征中學習出高層特征,進而分類出不同的目標類型。
2 光伏電站無人機自動化巡檢系統
結合上文算法,本文提出一種光伏電站無人機自動化巡檢系統,并以某光伏發電項目為例,對其巡檢效率進行分析。
2.1 無人機自動化巡檢系統的設計
無人機自動化巡檢系統主要由軟件和硬件兩部分組成。軟件包括光伏組件缺陷檢測軟件,涉及移動巡檢子系統、數據采集子系統、補能子系統和遠程監控子系統;硬件包括無人機自動機庫、無人機套裝、雙光相機套裝、機載邊緣計算模塊和圖像處理器(GPU)服務器。
無人機在實際應用過程中,存在操作人員不足、操作人員技術水平參差不齊等一系列問題,采集標準圖片的準確性和一致性較差。因此,采用無人駕駛及全自動工作模式成為無人機的發展方向。將自動飛行算法和自動識別系統與無人機相結合是業界典型的解決方案,使無人機逐漸擺脫對飛行裝備的依賴。無人機自動化巡檢系統可以通過無人機自動機庫釋放無人機,收集光伏電站的信息,生成適合不同地形的光伏組件巡檢路線,無人機可實現自動起飛、執行任務、返航及降落。無人機自動化巡檢系統的工作原理圖如圖5 所示。
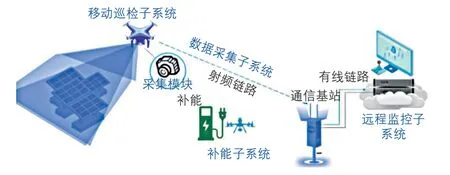
圖5 無人機自動化巡檢系統的工作原理圖Fig.5 Working principle diagram of UAV automated inspection system
無人機的起飛和降落流程如圖6 所示。
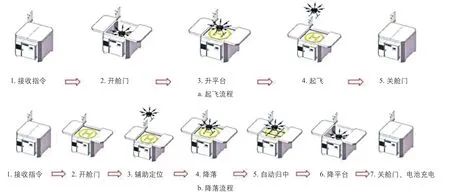
圖6 無人機的起飛和降落流程Fig.6 Process of takeoff and landing of UAV
無人機自動機庫由框架組件、對中組件、升降機構、電池充電系統、電控系統等組成,其具有以下功能特點。
1)航線指揮:無人機自動機庫接到遠程控制系統任務指令后,指揮無人機沿既定航線行駛。
3)無人機存儲:無人機自動機庫通過框架組件、箱體降溫系統為無人機創造全天候恒溫恒濕的存放空間。
4)協助無人機起降:無人機要離開無人機自動機庫時,升降平臺處于上升狀態,自動門打開;無人機離開機庫后,機庫門自動關閉。當無人機入庫時,機庫門自動開啟,升降平臺處于上升狀態。
5)無人機電池充電:無人機自動機庫內置電池充電系統,能夠同時對無人機配備的冗余電池組進行充電。
無人機自動化巡檢流程如圖7 所示。
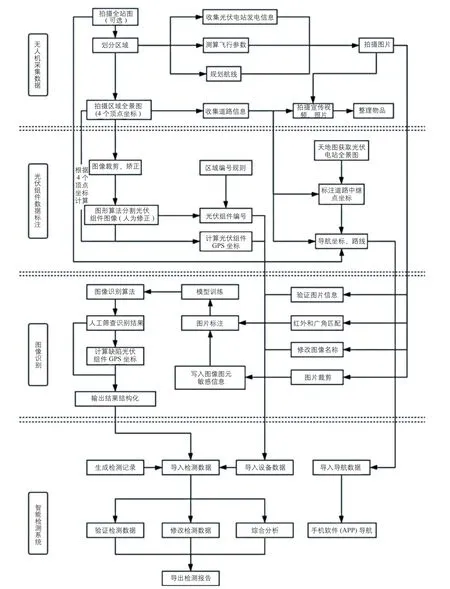
圖7 無人機自動化巡檢流程Fig.7 Process of UAV automated inspection
2.2 無人機自動化巡檢時的飛行方式及巡檢效率
無人機的飛行路徑是通過設置無人機飛行高度及照片重疊率自動生成的,在飛行高度為40 m、照片重疊率為10%的情況下,通常無人機的巡飛速度為6~10 m/s。無人機單架次的光伏組件巡檢規模為4~5 MW,1 架無人機在保證電池電量充足的情況下,1 天的光伏組件巡檢規模可達50 MW。以宜興市某分布式光伏發電項目為例,無人機航線的自動規劃與無人機飛行航點的自動生成界面圖如圖8 所示。
2.3 無人機自動化巡檢與人工巡檢的效率對比
使用無人機檢查光伏電站的光伏組件缺陷,可以減少人員監督,大幅節省人力成本。對于40 MW 地面光伏電站而言,若采用人工巡檢方式,兩個巡檢人員每天工作10 h 仍需4~5 天才能完成1 次巡檢;而使用無人機自動化巡檢方式,單架無人機僅需約8 h 就能對該光伏電站進行一次全范圍檢查。經對比,無人機自動化巡檢相較人工巡檢效率提高了90%以上,極大縮短了巡檢時間。同時,無人機的自動化巡檢有助于使業主和運維人員對光伏電站故障做出快速響應,從而可提高光伏電站發電效率,提升其經濟效益。這也意味著合理運用無人機進行自動化巡檢可以降低光伏電站的運維成本。
另外,若無人機擁有故障精確定位、設備故障自動診斷、故障智能分析等功能后,將具有令人工巡檢望塵莫及的優勢。無人機可以結合云端大數據平臺,對獲取的大量飛行及檢測數據進行分析,從而對已發生或者即將發生故障的區域做出有效預測和分析。
3 結論
本文提出一種光伏電站無人機自動化巡檢系統,其利用無人機搭載雙光相機(包括可見光鏡頭和紅外熱成像鏡頭)對光伏電站中的光伏組件區域進行自動化巡檢,配合圖像自動識別技術及時發現存在問題的光伏組件,提高故障消缺效率;并以40 MW 地面光伏電站為例進行了無人機自動化巡檢和人工巡檢的效率對比,結果顯示:單架無人機8 h 可完成1 次巡檢,而兩個巡檢人員每天工作10 h 仍需4~5 天才能完成1 次巡檢,由此可知,無人機自動化巡檢相較人工巡檢效率提高了90%以上。因此,利用無人機對光伏電站進行自動化巡檢將成為光伏電站巡檢最高效的手段之一。
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
汽車維修與保養(2019年7期)2020-01-06 03:30:42
商周刊(2017年9期)2017-08-22 02:57:49
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
時代英語·高二(2015年1期)2015-03-16 00:08:11
汽車維護與修理(2015年2期)2015-02-28 12:15:39