基于概率模型驅(qū)動的機載貝葉斯前視超分辨多目標(biāo)成像方法
2024-01-02 12:18:58陳洪猛余繼周張文杰李亞超魯耀兵
雷達學(xué)報 2023年6期
關(guān)鍵詞:方法
陳洪猛 余繼周* 張文杰 李亞超 李 軍 蔡 良 魯耀兵*
①(北京無線電測量研究所 北京 100854)
②(西安電子科技大學(xué)雷達信號處理國家重點實驗室 西安 710071)
1 引言
前視成像雷達(Forward-Looking Radar,FLR)由于在飛行器自主導(dǎo)航,導(dǎo)彈末端制導(dǎo),自動駕駛等領(lǐng)域具有廣闊的應(yīng)用前景,因此在軍事和民用領(lǐng)域越來越受到重視[1–4]。傳統(tǒng)的多普勒波束銳化(Doppler Beam Sharpening,DBS)技術(shù)[5–7]和合成孔徑雷達(Synthetic Aperture Radar,SAR)[8–13]通常采用條帶模式或前斜視模式工作。然而,受多普勒成像原理的限制,這兩種方法由于多普勒歷程的約束無法對飛行方向的正前方區(qū)域進行高分辨率成像,從而導(dǎo)致前視盲區(qū)。因此,不斷追求方位分辨率的提升是前視成像技術(shù)不斷發(fā)展的動力。
為了獲得FLR成像場景的細節(jié)信息,利用寬帶信號和脈沖壓縮技術(shù)可以獲取高距離分辨率。為了克服多普勒歷程的約束,最直接的解決思路就是通過引入發(fā)射平臺和接收平臺的空間分集帶來的獨立多普勒信息進行方位高分辨成像,這也是雙基 SAR[14–21]技術(shù)可用來提高方位分辨率的關(guān)鍵,但雙基前視SAR成像的空間幾何關(guān)系復(fù)雜,特別是空時頻同步的精度給收發(fā)雷達系統(tǒng)的設(shè)計帶來較大的復(fù)雜度。文獻[22–24]充分利用和差通道的信息,將單脈沖測角與前視成像技術(shù)相結(jié)合提高方位分辨率。楊志偉等人[25]采用實波束重疊掃描的方式,利用波達角(Direction of Arrival,DOA)估計方法和理論實現(xiàn)了前視成像。在 DOA 估計基礎(chǔ)上,王軍等人[26]和溫曉楊等人[27]針對前視成像近似稀疏的場景,通過壓縮感知(Compressed Sensing,CS)的方式獲取前視成像結(jié)果。由于FLR的前視成像方位分辨率主要與天線孔徑大小成反比,當(dāng)天線孔徑越來越大時,天線波束寬度將越來越小。在這種情況下,可以獲得高方位分辨率,因此近年來實孔徑前視成像技術(shù)越來越受到關(guān)注。研究表明,解卷積技術(shù)[28]是一種不改變現(xiàn)有雷達系統(tǒng)體制,利用信號處理手段提高方位分辨率的有效方法。但由于天線方向圖的低通特性,直接的解卷積技術(shù)是一個病態(tài)問題,因此許多改進的解卷積前視成像技術(shù)應(yīng)運而生。李悅麗等人[29]提出一種基于多通道處理的解卷積前視技術(shù),通過利用多個通道信息的聯(lián)合處理克服解卷積過程中的病態(tài)問題,但對于無人機載和彈載雷達系統(tǒng)而言,多通道會增加系統(tǒng)設(shè)計的復(fù)雜度。為降低系統(tǒng)的復(fù)雜度,單通道解卷積技術(shù)[30–41]越來越受到國內(nèi)外學(xué)者的關(guān)注。文獻[31]通過引入l2范數(shù),將正則化方法應(yīng)用于提高方位分辨率,取得了一定的效果。文獻[32–34]將稀疏性約束嵌入到解卷積成像中,進一步提高了前視成像的分辨率,為單通道解卷積技術(shù)的發(fā)展帶來了新的曙光。
為了減輕FLR解卷積前視成像問題的病態(tài)性,Huang等人[35]和Tuo等人[36]引入了截斷奇異值分解方法(Truncated Singular Value Decomposition Method,TSVD)提高方位角質(zhì)量。然后,Yang等人將迭代自適應(yīng)處理(Iterative Adaptive Approach,IAA)方法[37]引入前視成像。正則化方法[38]是將不適定問題轉(zhuǎn)換為附近的條件良好問題的良好工具,該操作可以通過在最小二乘算法上選擇不同的正則化約束來實現(xiàn)。正則化可以解決反卷積問題,獲得更好的性能。此外,Zhang等人[39,40]提出了基于全變差(Total Variation,TV)的方法來描述場景信息,這在保持目標(biāo)輪廓方面表現(xiàn)良好。為了充分利用前視成像場景的先驗信息,Yang等人提出了基于貝葉斯框架[41–47]的前視方法。
然而,目前的機載前視成像方法的研究主要集中在場景稀疏性先驗已知的情況下。真實場景中的稀疏性不能采用單純的某一種稀疏約束進行表征,特別是當(dāng)場景中包含多個目標(biāo)時,此時場景稀疏度的度量和表征是影響復(fù)雜場景下前視成像質(zhì)量的關(guān)鍵。針對此問題,基于先前已經(jīng)建立的多普勒解卷積前視成像模型[41–44],提出了一種基于廣義高斯概率模型驅(qū)動的機載貝葉斯前視超分辨率多目標(biāo)成像方法。本文的主要貢獻是針對多目標(biāo)場景,自動的迭代選擇場景稀疏度參數(shù),并基于貝葉斯準則,將選取的稀疏度表征參數(shù)嵌入到前視成像過程中。此外,本文所提出的方法在每次迭代期間都會進行參數(shù)更新,從而增加了不同情況,具有魯棒性。
2 前視成像信號模型
如圖1所示,假設(shè)機載平臺工作在前視成像模式,雷達波束指向與機載平臺飛行方向之間的夾角為θ,與水平方向的俯仰角為φ。假設(shè)機載平臺的飛行速度為v,飛行方向沿X軸正向,飛行高度用H表示。雷達波長為λ,R0為雷達與目標(biāo)場景中心之間的初始斜距。

圖1 機載前視成像雷達工作示意圖Fig.1 Geometry of airborne forward-looking radar
雷達發(fā)射線性調(diào)頻信號:
其中,τ為快時間,fc為發(fā)射雷達信號的載頻,Tp為脈沖持續(xù)時間,rect(τ/Tp)為矩形函數(shù),則回波信號的復(fù)包絡(luò)可以表示為
此時,雷達與場景中任一目標(biāo)之間的瞬時斜距和瞬時角度值可以表述為
其中,tm為方位慢時間,σ(R,θ)為目標(biāo)的散射分布函數(shù),fc為雷達載頻,Kr為線性調(diào)頻信號的調(diào)頻率,h(·) 為天線的方向圖,ω為天線的掃描速度。
首先對回波信號進行下變頻處理,并進行距離走動校正后的回波信號可以轉(zhuǎn)化為
采用基于Keystone變換的方法對回波信號進行距離走動校正,經(jīng)過距離走動校正之后,由式(5)可以看出,某一距離單元上的回波信號是天線方向圖與目標(biāo)散射分布函數(shù)σ(R,θ)的卷積,即
同時,將回波信號中的噪聲用n(θ)表示,則前視成像模式下的回波信號可以簡化為
假設(shè)方位慢時間維有M個采樣點,為了便于分析,將式(7)轉(zhuǎn)化為矩陣形式
其中,σ為目標(biāo)后向散射系數(shù)分布向量,G為天線方向圖矩陣,S為方位向雷達接收信號,Φ為多普勒矩陣,n為系統(tǒng)噪聲,G和Φ的具體形式如下:
式(9)和式(10)的前視解卷積模型不僅考慮了天線方向圖矩陣對散射點的影響,并且考慮了多普勒矩陣的影響。在實際情況下,由于機載平臺的運動速度很快,這種影響是不可能消除的。為了提高對前視成像的分辨率,需要對多普勒矩陣進行準確描述,然后再進行后續(xù)的前視成像處理。
3 基于廣義高斯概率模型驅(qū)動的貝葉斯前視超分辨成像方法
3.1 多普勒解卷積前視成像模型
為了降低計算復(fù)雜度,在保證前視成像質(zhì)量的前提下,參考以前的工作[37,44–46],對式(8)進行化簡,根據(jù)目標(biāo)的斜距歷程,可以求得目標(biāo)的多普中心頻率為
將θ(tm)=θ0-ωtm代入式(11),并進行泰勒展開,則瞬時多普勒可以修正為
由于機載雷達主要工作在前視狀態(tài),|θm|≤10°。為了后續(xù)的工程應(yīng)用和實現(xiàn),式(12)可以簡化為
此時1階多普勒解卷積模型下的前視回波信號可以簡化為
經(jīng)過化簡之后,由于多普勒運動所引起的相位因子可以描述為
為提高多普勒解卷積的性能,提取先驗信息是重要的。更通常的做法是將稀疏信息用于前視雷達成像中。然而,在單波束空間中散射源并不是完全滿足稀疏性的假設(shè)。
為解決這一問題,利用多波束空間下的解卷積前視成像模型[44]。在方位上將單波束回波交聯(lián)形成高維空間。即使呈現(xiàn)局部聚集特性的多個散射點在單幀數(shù)據(jù)內(nèi)不滿足稀疏性假設(shè),在多幀數(shù)據(jù)組成的聯(lián)合高維空間內(nèi)仍可以看作是稀疏的。此時前視成像場景的稀疏性得到改善,高維空間下的回波信號可表示為
在一個距離門內(nèi),式(16)可以進一步表示為
其中,Y和X分別是高維空間回波矩陣和散射矩陣。P為波束數(shù)量,H和Φ為天線矩陣和擴展的多普勒卷積矩陣,表達式為
3.2 基于廣義高斯概率模型驅(qū)動的貝葉斯前視超分辨成像
為了獲取高分辨的前視成像結(jié)果,需要對式(17)進行多普勒解卷積求解。國內(nèi)外的學(xué)者通過將稀疏性約束嵌入到解卷積成像中,在一定程度上改善了前視成像的方位分辨率。但是,由于前視成像場景的復(fù)雜性,單純的某一種稀疏約束無法完整地刻畫真實的場景。
為了更加準確地描述前視成像場景的稀疏度,本文采用廣義高斯概率模型對前視成像場景中的散射點分布特性進行統(tǒng)計建模,其表達式可以描述為
在多波束空間中,本文采用一組仿真數(shù)據(jù)對成像場景的稀疏特性進行直方圖統(tǒng)計,并分別采用高斯模型、Laplace分布和廣義高斯模型進行擬合。圖2給出了某一距離單元回波信號的直方圖統(tǒng)計,場景參數(shù)如表1所示。從圖2可以看出,當(dāng)場景復(fù)雜時,傳統(tǒng)的Laplace分布的稀疏性假設(shè)[30,41,46]已經(jīng)不能完整地刻畫復(fù)雜場景的稀疏度,場景稀疏度的失配在一定程度上會導(dǎo)致成像質(zhì)量的下降。因此,場景稀疏度的度量和表征是影響前視成像質(zhì)量的關(guān)鍵。

表1 點目標(biāo)仿真實驗雷達參數(shù)Tab.1 Radar parameters for simulation experiment with point targets

圖2 某一距離單元的直方圖分布統(tǒng)計Fig.2 Histogram distribution for one range cell
在滿足獨立同分布(i.i.d.)的假設(shè)條件下,成像場景的稀疏度可以采用概率密度函數(shù)進行描述,具體表達式為
經(jīng)化簡,前視成像問題可表示為
其中,μ=2ε2b是歸一化參數(shù),用于平衡稀疏性與前視成像質(zhì)量,它與回波信號、噪聲水平、形狀系數(shù)等多個因素有關(guān),本文主要采用最小二乘方法設(shè)定,詳細的參數(shù)選取方法見文獻[48]。
對式(24)進行進一步的化簡,可得到
為獲得前視稀疏成像的最優(yōu)解,對X求J()的梯度,得到
此時,式(26)可以通過準牛頓方法獲得迭代解,表達式為
其中,n為迭代次數(shù),A=2(H ⊙Φ)HH ⊙Φ+μΛ,通過不斷迭代求解,直至滿足終止條件,最終得到圖像矩陣+1。假設(shè)M表示單個波束空間的方位采樣點數(shù),P表示多波束空間中的單波束個數(shù),N代表迭代計算的次數(shù),則本文方法的計算復(fù)雜度約為O(N(PM)3+N(PM)2)。具體的算法處理步驟如算法1所示。
4 仿真和實測實驗結(jié)果分析
本節(jié)將進行仿真和實測數(shù)據(jù)驗證所提方法的有效性,試驗結(jié)果將實際波束方法、TSVD方法、Tikhonov方法、IAA方法、貝葉斯方法和本文所提出的方法進行了比較。后文將提出的方法簡寫為PM-Bayesian (Probability Model-driven airborne Bayesian)。
4.1 點陣目標(biāo)仿真實驗結(jié)果
圖3給出了真實的原始場景,成像場景由14個點目標(biāo)組成,機載雷達的部分參數(shù)如表2所示,仿真過程中回波的信噪比(Signal-to-Noise-Ratio,SNR)設(shè)置為10 dB,其中SNR定義為

算法 1 前視超分辨成像方法求解流程Alg.1 Solution flow of the proposed algorithm

表2 面目標(biāo)仿真實驗雷達參數(shù)Tab.2 Radar parameters for simulation experiment with surface targets

圖3 真實的點目標(biāo)分布場景Fig.3 True point targets distribution scene
其中,Ps和Pn分別表示回波與噪聲的平均功率。
從圖4可以看出,由于真實場景中最鄰近點目標(biāo)之間的角度間隔小于天線的波束寬度,所以實波束方法存在明顯的信號混疊現(xiàn)象,且受限于天線方向圖的調(diào)制作用,無法對點陣目標(biāo)進行較好的前視成像。TSVD方法由于受到噪聲的嚴重影響,成像結(jié)果存在模糊,這可能是由于在低信噪比下難以選擇合適的奇異值所導(dǎo)致的。Tikhonov方法保持了前視成像結(jié)果的完整性,但在目標(biāo)周圍出現(xiàn)了一些副瓣。IAA方法的成像結(jié)果目標(biāo)輪廓清晰,信息保持完整。但對于相鄰的非常近的兩個目標(biāo)無法很好的區(qū)分。圖4(e)和圖4(f)顯示了貝葉斯和提出的PM-Bayesian方法的成像結(jié)果。這兩種方法都可以獲得高分辨的前視成像結(jié)果,并且所提出的PMBayesian不僅提高了前視成像分辨率,而且周邊的副瓣和噪聲更低,從而在一定程度上抑制了噪聲。圖4(g)給出了不同方法在某一距離單元的前視成像結(jié)果對比圖,從中可以看出所提出的PM-Bayesian不僅可以準確地對前視場景中的散射點進行成像,還可以獲得較低的副瓣,從而為后續(xù)的目標(biāo)識別提供支撐。

圖4 不同方法的前視成像結(jié)果對比Fig.4 Angular super-resolution results of different methods
為了定量評估不同前視成像算法的性能,進行了100次蒙特卡羅實驗,統(tǒng)計出不同方法在不同SNR下的均方根誤差(Root Mean Square Error,RMSE)變化曲線。其中RMSE定義為
從圖5可以看出,隨著SNR的提升,每一種前視成像方法的RMSE都會降低,并且當(dāng)SNR降低時,所提出的PM-Bayesian的RMSE變化相對較小,試驗結(jié)果表明本文方法具有較強的穩(wěn)健性。

圖5 不同SNR下的仿真點目標(biāo)RMSE變化曲線Fig.5 RMSE curves of simulation point targets under different SNRs
4.2 復(fù)雜面目標(biāo)仿真實驗結(jié)果
為了進一步驗證所提出方法的性能,本節(jié)將考慮更復(fù)雜的飛機模型,并且場景中包含了3架飛機模型,如圖6所示,仿真過程中回波的SNR設(shè)置為20 dB。

圖6 真實成像場景Fig.6 True original scene of surface targets
圖7給出了采用不同前視成像方法進行前視成像的結(jié)果,從中可以看出實波束方法出現(xiàn)了模糊,無法進行高分辨前視成像。圖7(b)—圖7(d)分別是TSVD,Tikhonov和IAA方法處理的結(jié)果,從中可以看出雖然方位分辨率得到了改善,但是在不同的距離門還存在許多虛假點目標(biāo),背景噪聲的基底很大,不利于后續(xù)的目標(biāo)檢測。圖7(e)—圖7(f)是貝葉斯和PM-Bayesian的處理結(jié)果,從中可以看出,雖然貝葉斯方法可以獲得目標(biāo)的輪廓信息,但本文提出的PM-Bayesian成像結(jié)果可以獲得更多的細節(jié)信息,不僅方位副瓣很低,而且背景噪聲很干凈,對后續(xù)的目標(biāo)識別提供了高清的成像結(jié)果。
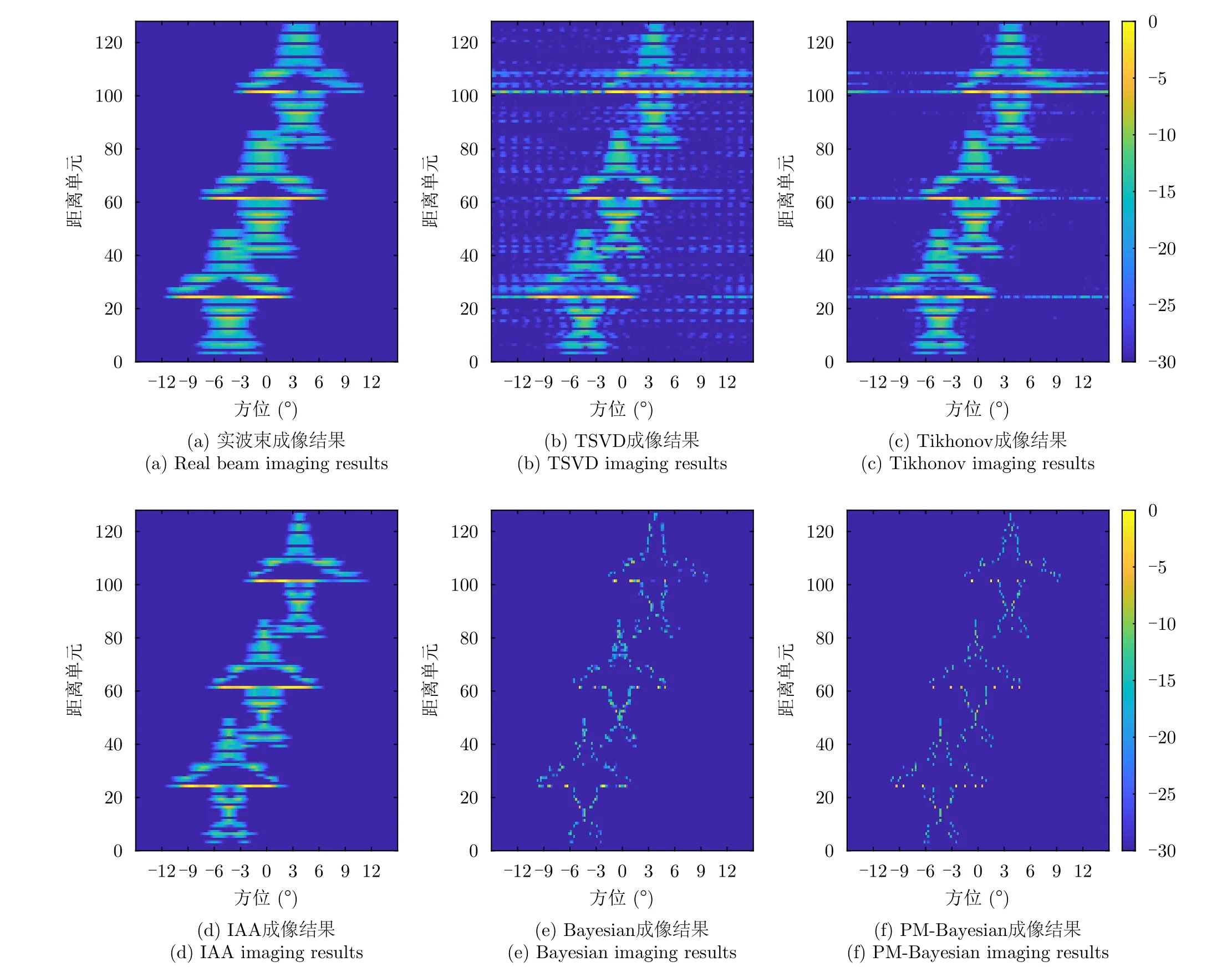
圖7 不同方法的多目標(biāo)前視成像結(jié)果對比Fig.7 Angular super-resolution results of different methods for multitarget scenario
針對復(fù)雜面目標(biāo)的場景,圖8給出了不同前視成像算法在不同SNR下的RMSE變化曲線。從圖8可以看出,在SNR較高時,每一種前視成像方法的RMSE都會降低,但在低SNR條件下,本文所提出的PM-Bayesian的RMSE更小。上述原因主要是由于PM-Bayesian選取的稀疏度表征參數(shù)嵌入到前視成像的整個過程中,在每次迭代期間都會進行前視成像參數(shù)的更新,從而確保了本文方法在低SNR條件下仍具有較強的穩(wěn)健性。

圖8 不同SNR下的仿真面目標(biāo)RMSE變化曲線Fig.8 RMSE curves of simulation surface targets under different SNRs
4.3 實測數(shù)據(jù)實驗結(jié)果
為了進一步驗證本文方法的有效性,本文采用一組北京無線電測量研究所在2019年錄取的實測數(shù)據(jù)進行分析,本組實驗數(shù)據(jù)場景中包含了房屋建筑物、道路等典型目標(biāo),不同方法下的成像結(jié)果如圖9所示。

圖9 不同方法的實測數(shù)據(jù)前視成像結(jié)果對比Fig.9 Angular super-resolution results of different methods for real data
從圖9可以看出,實波束成像方法的方位向模糊嚴重,無法在方位維度對目標(biāo)進行很好的分辨。圖9(b)和圖9(c)分別是TSVD和Tikhonov方法的成像結(jié)果,從中可以看出,方位分辨率雖然有了提升,但成像質(zhì)量依舊較差。圖9(d)和圖9(e)分別是IAA和貝葉斯方法的成像結(jié)果,從中可以看出建筑物和道路信息已經(jīng)開始清晰。本文提出的PMBayesian成像方法如圖9(f)所示,從圖9(f)可以看出,圖中的建筑物房屋得到了很好的區(qū)分,詳細的細節(jié)信息如圖10中紅色矩形框中所示。

圖10 不同方法的前視成像結(jié)果局部放大對比圖Fig.10 Zoomed in results of different methods
圖10(a)中,基于真實波束的前視成像結(jié)果模糊,這意味著方位分辨率較差。如圖10(b)和圖10(c)所示,基于TSVD和Tikhonov方法的成像結(jié)果優(yōu)于實波束方法。特別在圖10(d)的IAA方法已經(jīng)可以對圖中的2個建筑物進行很好區(qū)分,然而,圖像中仍然存在一些陰影和旁瓣。圖10(e)中,我們可以看出貝葉斯方法可以實現(xiàn)比IAA更好的分辨率,并且可以獲取目標(biāo)的輪廓信息。相比之下,所提出的PM-Bayesian算法不僅可以恢復(fù)更詳細的建筑物信息,而且成像結(jié)果中的噪聲和副瓣更小。因此,所提出的PM-Bayesian方法的結(jié)果具有更高的方位超分辨率能力和更好的噪聲抑制能力。基于實測數(shù)據(jù)的處理結(jié)果表明,本文提出的前視成像方法無論在視覺效果還是在成像質(zhì)量都優(yōu)于其他方法,從而驗證了本文方法的有效性。
5 結(jié)語
解卷積方法可以進行前視成像,但當(dāng)前視成像場景復(fù)雜時,現(xiàn)有的前視成像方法的成像質(zhì)量會下降。本文主要針對機載高速平臺的前視成像問題進行了分析,提出了一種基于概率模型驅(qū)動的機載貝葉斯前視超分辨多目標(biāo)成像方法。通過將前視成像空間擴展到多幀數(shù)據(jù)空間提升場景的稀疏度,并采用廣義高斯概率模型對成像場景的稀疏特性進行統(tǒng)計建模和表征,最后基于貝葉斯框架實現(xiàn)稀疏前視成像。仿真結(jié)果和實測數(shù)據(jù)表明,由于選取的稀疏度表征參數(shù)嵌入到前視成像的整個過程中,在每次迭代期間都會進行前視成像參數(shù)的更新,因此本文方法不僅可以獲得高分辨成像結(jié)果,而且具有較強的魯棒性。
本文主要針對弱稀疏場景下的多目標(biāo)前視成像問題進行了研究,后續(xù)將繼續(xù)挖掘更多的場景先驗信息,研究更加穩(wěn)健的成像網(wǎng)絡(luò)模型,提升復(fù)雜非稀疏場景下的單通道前視成像性能。
利益沖突所有作者均聲明不存在利益沖突
Conflict of Interests The authors declare that there is no conflict of interests
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56