基于機(jī)器視覺(jué)的高速電梯鋼絲繩動(dòng)態(tài)特性研究
2024-01-03 06:35:46蘇萬(wàn)斌徐濤歐淼張國(guó)斌易燦燦
機(jī)械制造與自動(dòng)化 2023年6期
蘇萬(wàn)斌,徐濤,歐淼,張國(guó)斌,易燦燦
(1. 嘉興市特種設(shè)備檢驗(yàn)檢測(cè)院,浙江 嘉興 314050; 2. 武漢科技大學(xué),湖北 武漢 430081)
0 引言
鋼絲繩作為高速電梯懸掛系統(tǒng)的重要組成部分,其受力不均勻、運(yùn)行過(guò)程中振幅、頻率變化大,直接影響乘坐人員的乘坐舒適性,同時(shí)也是導(dǎo)致曳引驅(qū)動(dòng)電梯鋼絲繩不均勻磨損的主要因素之一。如果電梯各鋼絲繩受力調(diào)節(jié)不平衡,就會(huì)導(dǎo)致其中的一根或幾根鋼絲繩受力過(guò)大,從而影響電梯的承運(yùn)質(zhì)量。如果鋼絲繩受力不均衡沒(méi)有得到及時(shí)調(diào)節(jié),還存在鋼絲繩斷股斷絲的情況,從而帶來(lái)嚴(yán)重的安全隱患,最終影響乘客的安全。因此,精確地檢測(cè)電梯各鋼絲繩的動(dòng)態(tài)特性并及時(shí)調(diào)節(jié)鋼絲繩對(duì)電梯的使用壽命以及使用安全有重要的意義。現(xiàn)有的鋼絲繩檢測(cè)技術(shù)主要有目測(cè)法、彈簧秤法和壓力傳感器法[1]。
目前檢測(cè)手段缺陷分析:在電梯鋼絲繩受力檢測(cè)中,根據(jù)現(xiàn)有的接觸式檢測(cè)方法分析,電梯在運(yùn)行過(guò)程中由于測(cè)量的鋼絲繩長(zhǎng)度一直在變化,所以無(wú)法得知運(yùn)動(dòng)過(guò)程中每一時(shí)刻的鋼絲繩長(zhǎng)度,并且由于鋼絲繩振動(dòng)的回波來(lái)不及傳導(dǎo)而相互疊加,導(dǎo)致無(wú)法提取到正確的振動(dòng)頻率、幅度及相位,其中最重要的是運(yùn)行過(guò)程中壓力傳感器等測(cè)量設(shè)備無(wú)法安裝在鋼絲繩上,所以無(wú)法正確測(cè)得動(dòng)態(tài)情況下鋼絲繩的動(dòng)態(tài)特性[2-3]。
因此開(kāi)發(fā)一套精確且動(dòng)態(tài)非接觸式的電梯鋼絲繩動(dòng)態(tài)特性檢測(cè)儀能夠使檢測(cè)過(guò)程更加高效。該設(shè)備使用機(jī)器視覺(jué)技術(shù)來(lái)精確、快速地采集分析鋼絲繩的搖擺方向、振蕩的幅度及頻率,快速判斷鋼絲繩的受力均勻度狀況。配合無(wú)線(xiàn)模塊能夠?qū)?shù)據(jù)傳輸?shù)绞謾C(jī)端保存,使得數(shù)據(jù)閱覽更加方便,并且本地保存數(shù)據(jù)使得檢測(cè)過(guò)程具有追溯性。
1 懸掛系統(tǒng)動(dòng)態(tài)特性分析
電梯懸掛鋼絲繩動(dòng)力學(xué)模型在許多研究論文中提到過(guò)[4],電梯的運(yùn)行速度越高,懸掛系統(tǒng)的動(dòng)態(tài)特性就越明顯。假設(shè)m1、I1、r1分別為曳引輪的質(zhì)量、轉(zhuǎn)動(dòng)慣量和曳引輪繩槽半徑;m5、I2、r2分別為張緊輪的質(zhì)量、轉(zhuǎn)動(dòng)慣量和曳引輪繩槽半徑;m4為平衡重的質(zhì)量;m2為橋架及附件的質(zhì)量;m3為轎廂及載荷的質(zhì)量;K0、C0分別為曳引機(jī)及減震墊的剛度和阻尼;K1、C1分別為曳引機(jī)及轎廂與曳引輪一側(cè)鋼絲繩的剛度和阻尼;K2、C2分別為超載裝置的剛度和阻尼;K3、C3分別為轎廂底部與張緊輪之間鋼絲繩的剛度和阻尼;K4、C4分別為對(duì)重與曳引機(jī)一側(cè)鋼絲繩的剛度和阻尼;K5、C5分別為對(duì)重與張緊輪一側(cè)鋼絲繩的剛度和阻尼;Km為曳引主機(jī)的抗扭剛度;x1、x2、x3、x4、x5分別為質(zhì)量為m1、m2、m3、m4、m5物體的振動(dòng)位移;α1、α2分別為曳引輪和張緊輪的振動(dòng)角位移;φ為曳引輪和張緊輪的振動(dòng)角位移。高速電梯懸掛系統(tǒng)結(jié)構(gòu)示意圖如圖1所示,動(dòng)態(tài)特性分析模型如圖2所示。

圖1 電梯懸掛系統(tǒng)結(jié)構(gòu)示意圖

圖2 電梯懸掛系統(tǒng)動(dòng)態(tài)特性分析模型
本文根據(jù)其運(yùn)動(dòng)特性建立基于運(yùn)動(dòng)彈性動(dòng)力學(xué)的懸掛系統(tǒng)動(dòng)力學(xué)模型,系統(tǒng)的總動(dòng)能表示為
(1)
鋼絲繩懸掛系統(tǒng)的總勢(shì)能為
(2)
鋼絲繩懸掛系統(tǒng)的總耗能為
(3)
鋼絲繩懸掛系統(tǒng)的振幅為
X=[x1,x2,x3,x4,x5,α1,α2]T
(4)
由拉格朗日微分方程可得
(5)
將鋼絲繩懸掛系統(tǒng)總動(dòng)能、總勢(shì)能、總耗能以及振幅帶入拉格朗日方程,得到系統(tǒng)的運(yùn)動(dòng)微分方程
(6)

鋼絲繩懸掛系統(tǒng)的剛度矩陣K是電梯運(yùn)行過(guò)程中鋼絲繩運(yùn)動(dòng)時(shí)間或者位置的函數(shù),采用運(yùn)動(dòng)彈性動(dòng)力學(xué)的方法求解上述方程組,對(duì)鋼絲繩系統(tǒng)采用瞬時(shí)結(jié)構(gòu)假定,對(duì)鋼絲繩進(jìn)行離散分解,將運(yùn)行過(guò)程中的鋼絲繩分為n個(gè)時(shí)間間隔,每個(gè)時(shí)間間隔內(nèi)鋼絲繩動(dòng)態(tài)特征被視為不變的。這樣一來(lái)就可以將原來(lái)鋼絲繩的變速運(yùn)動(dòng)微分方程轉(zhuǎn)化為常系數(shù)微分方程,第i個(gè)時(shí)間單元內(nèi),鋼絲繩的動(dòng)態(tài)特性微分方程表示為
(7)
根據(jù)鋼絲繩機(jī)械振動(dòng)原理,解特征方程可得
Ki{φ}i=p2Mi
(8)
根據(jù)上式,可求出第i個(gè)時(shí)間單元內(nèi)鋼絲繩系統(tǒng)的頻率矩陣p。
高速電梯懸掛系統(tǒng)的動(dòng)態(tài)性能計(jì)算結(jié)果將為后續(xù)機(jī)器視覺(jué)監(jiān)測(cè)系統(tǒng)的構(gòu)型選擇提供依據(jù)。
2 鋼絲繩監(jiān)測(cè)系統(tǒng)成像測(cè)量原理
鋼絲繩機(jī)器視覺(jué)的成像過(guò)程就是在將電梯運(yùn)行中的鋼絲繩實(shí)物投影變換到檢測(cè)儀圖像中的過(guò)程。現(xiàn)在基本采用的是數(shù)字儲(chǔ)存方式,在鋼絲繩的反射光線(xiàn)投影過(guò)程中涉及到了4個(gè)坐標(biāo)系的概念[5-6],建立基于鋼絲繩動(dòng)態(tài)特性的成像理論,如圖3所示。

圖3 鋼絲繩圖像采集原理示意圖
鋼絲繩機(jī)器視覺(jué)檢測(cè)設(shè)備的結(jié)構(gòu)光發(fā)射模塊和圖像采集模塊透過(guò)亞克力板面向鋼絲繩設(shè)置,結(jié)構(gòu)光發(fā)射模塊發(fā)射出的線(xiàn)激光照射鋼絲繩,圖像采集模塊采集虛線(xiàn)條X和Y之間的區(qū)域,形成圖像采集視場(chǎng)。由此,圖像采集模塊可以配合結(jié)構(gòu)光發(fā)射模塊提供的光照環(huán)境采集鋼絲繩的圖像,并將采集到的鋼絲繩圖像傳至中央處理模塊進(jìn)行一系列處理,以計(jì)算得到鋼絲繩的振幅、振動(dòng)相位、振動(dòng)頻率,進(jìn)而根據(jù)所述鋼絲繩的振動(dòng)信息(振幅、振動(dòng)相位、振動(dòng)頻率)之間的差值大小判斷一組鋼絲繩的受力是否均勻[7]。
3 鋼絲繩監(jiān)測(cè)系統(tǒng)圖像處理算法研究
在前期對(duì)高速電梯懸掛系統(tǒng)動(dòng)態(tài)性能分析的基礎(chǔ)上,對(duì)機(jī)器視覺(jué)監(jiān)測(cè)系統(tǒng)的硬件設(shè)備選型完畢,硬件系統(tǒng)搭建完成后,對(duì)所測(cè)量的動(dòng)態(tài)鋼絲繩實(shí)現(xiàn)圖像獲取,視頻錄像。在獲得了目標(biāo)的圖像后,為了提取圖像中鋼絲繩振動(dòng)位移、頻率以及張力情況,還需要對(duì)獲得的圖像進(jìn)行一系列處理,如圖4所示。

圖4 圖像處理流程
高速電梯懸掛系統(tǒng)鋼絲繩的工作狀態(tài)主要是軸向往返運(yùn)動(dòng),而且表面紋理與色彩十分接近,這就導(dǎo)致了在針對(duì)某一個(gè)具體點(diǎn)的振動(dòng)、頻率以及張力的測(cè)量過(guò)程中,很難準(zhǔn)確選擇一個(gè)特征區(qū)域。結(jié)合現(xiàn)有研究技術(shù),本文采用相對(duì)坐標(biāo)法對(duì)鋼絲繩的振動(dòng)參數(shù)進(jìn)行計(jì)算,建立一種基于圖像識(shí)別技術(shù)的鋼絲繩動(dòng)態(tài)特性參數(shù)處理算法。
根據(jù)上面的鋼絲繩識(shí)別技術(shù)分析在計(jì)算鋼絲繩的振動(dòng)、頻率以及張力的測(cè)量過(guò)程中,主要分為4步。
步驟1:3D相機(jī)通過(guò)三維測(cè)距技術(shù)將各鋼絲繩x方向和y方向振動(dòng)情況,按照時(shí)域展開(kāi)得到波形F1(x1)~Fn(xn)和F1(y1)~Fn(yn)。
步驟2:振動(dòng)頻率計(jì)算,Freq=1/T,其中T為F(x)為0時(shí)相鄰奇數(shù)x點(diǎn)或相鄰偶數(shù)點(diǎn)之差。通過(guò)此算法得到各鋼絲繩x方向振動(dòng)頻率Freq1(x1)~Freqn(xn)和y方向振動(dòng)頻率Freq1(y1)~Freqn(yn)。
步驟3:振動(dòng)幅度計(jì)算,通過(guò)將波形F1(x1)~Fn(xn)和F1(y1)~Fn(yn)波峰值和波谷值相減,獲取多個(gè)高度振動(dòng)幅度W1(x1)~Wn(xn)和y方向振動(dòng)頻率W1(y1)~Wn(yn)。
步驟4:張緊度計(jì)算步驟①,x方向振幅換算張緊度分量值計(jì)算如式(9)和式(10)所示。
M1=(1/W1(x1))·n/(1/W1(x1)+…+1/Wn(xn))
(9)
Mn=(1/Wn(xn))·n/(1/W1(x1)+…+1/Wn(xn))
(10)
張緊度計(jì)算步驟②,y方向振幅換算張緊度分量值計(jì)算如式(11)、式(12)所示。
N1=(1/W1(y1))·n/(1/W1(y1)+…+1/Wn(yn))
(11)
Nn=(1/Wn(yn))·n/(1/W1(y1)+…+1/Wn(yn))
(12)
張緊度計(jì)算步驟③,x方向頻率換算張緊度分量值計(jì)算如式(13)、式(14)所示。
O1=(1/Freq1(x1))·n/(1/Freq1(x1)+…+1/Freqn(xn))
(13)
On=(1/Freqn(xn))·n/(1/Freq1(x1)+…+1/Freqn(xn))
(14)
張緊度計(jì)算步驟④,y方向頻率換算張緊度分量值計(jì)算如式(15)、式(16)所示。
P1=(1/Freq1(y1))·n/(1/Freq1(y1)+…+1/Freqn(yn))
(15)
Pn=(1/Freqn(yn))·n/(1/Freq1(y1)+…+1/Freqn(yn))
(16)
張緊度計(jì)算步驟⑤,張緊力計(jì)算(k1~k4為實(shí)驗(yàn)系數(shù)),如式(17)、式(18)所示。
F1=(k1·M1+k2·N1+k3·O1+k4·P1)·n/[(k1·M1+k2·N1+k3·O1+k4·P1)+…+(k1·Mn+k2·Nn+k3·On+k4·Pn)]
(17)
Fn=(k1·Mn+k2·Nn+k3·On+k4·Pn)·n/[(k1·M1+k2·N1+k3·O1+k4·P1)+…+(k1·Mn+k2·Nn+k3·On+k4·Pn)]
(18)
4 實(shí)驗(yàn)與分析
4.1 硬件架構(gòu)
分析電梯懸掛系統(tǒng)動(dòng)態(tài)性能檢測(cè)裝置的設(shè)計(jì)原理,研制了電梯懸掛系統(tǒng)動(dòng)態(tài)性能檢測(cè)裝置,包括中央處理機(jī)構(gòu)(無(wú)線(xiàn)通信)、圖像采集機(jī)構(gòu)(結(jié)構(gòu)光)、檢測(cè)機(jī)構(gòu)(傳感器、電源)、輔助元件等4部分。通過(guò)與電梯相關(guān)部件(工字鋼)的聯(lián)接,將電梯懸掛系統(tǒng)動(dòng)態(tài)性能檢測(cè)裝置安裝到電梯機(jī)房工字鋼上,電梯運(yùn)行時(shí)實(shí)現(xiàn)電梯懸掛系統(tǒng)動(dòng)態(tài)性能檢測(cè),設(shè)備檢測(cè)時(shí)數(shù)據(jù)回傳手機(jī)APP,得到電梯運(yùn)行時(shí)電梯鋼絲繩受力均勻度、電梯鋼絲繩振動(dòng)頻率以及振動(dòng)幅度,機(jī)器視覺(jué)檢測(cè)儀設(shè)備結(jié)構(gòu)示意圖如圖5所示。

1—色標(biāo)傳感器;2—相機(jī);3—相機(jī)濾光片;4—DCDC降壓模塊;5—嵌入式主板;6—激光器濾光片;7—激光器;8—電池;9—設(shè)備安裝孔;10—開(kāi)關(guān);11—充電口;12—支架;13—z軸光學(xué)基座;14—y軸光學(xué)基座;15—x軸光學(xué)基座;16—c型卡;17—固定螺母。圖5 機(jī)器視覺(jué)檢測(cè)儀設(shè)備結(jié)構(gòu)示意圖
4.2 數(shù)據(jù)采集
研制的高速電梯鋼絲繩動(dòng)態(tài)特性檢測(cè)系統(tǒng)主要包括檢測(cè)裝置和應(yīng)用終端,鋼絲繩圖像數(shù)據(jù)通過(guò)工業(yè)相機(jī)拍攝獲取,系統(tǒng)檢測(cè)到工業(yè)相機(jī)拍攝圖像傳回終端,工業(yè)相機(jī)通過(guò)拍攝獲取鋼絲繩圖像數(shù)據(jù),電梯位移數(shù)據(jù)通過(guò)色標(biāo)傳感器采集,色標(biāo)傳感器色標(biāo)帶粘貼于電梯曳引輪表面,通過(guò)色標(biāo)傳感器采集到電梯轉(zhuǎn)動(dòng)圈數(shù)判斷電梯位移數(shù)據(jù),主要的檢測(cè)流程如圖6所示。

圖6 數(shù)據(jù)采集流程圖
4.3 現(xiàn)場(chǎng)測(cè)試
為了驗(yàn)證高速電梯鋼絲繩動(dòng)態(tài)性能檢測(cè)儀的檢測(cè)精度,通過(guò)幾十臺(tái)電梯進(jìn)行驗(yàn)證,設(shè)備通過(guò)不同電梯、不同位置檢測(cè)鋼絲繩張力、電梯鋼絲繩振動(dòng)頻率及電梯鋼絲繩振動(dòng)幅度,通過(guò)檢測(cè)出的實(shí)際數(shù)據(jù)與理論值對(duì)比,驗(yàn)證設(shè)計(jì)的檢測(cè)儀精度。現(xiàn)場(chǎng)檢測(cè)裝置的安裝如圖7所示,機(jī)器視覺(jué)鋼絲繩圖像采集位置如圖8所示。

圖7 現(xiàn)場(chǎng)測(cè)試圖

圖8 鋼絲繩圖像采集位置
4.4 結(jié)果分析
測(cè)試時(shí)電梯由上往下運(yùn)行,直至電梯到達(dá)底樓時(shí)停止檢測(cè)。在電梯運(yùn)行完成1個(gè)周期后,提取電梯1/3高度位置、1/2高度位置、2/3高度位置檢測(cè)結(jié)果與理論值進(jìn)行比對(duì)。不同電梯與不同高度位置采集到的張力均勻度與振動(dòng)幅度及振動(dòng)頻率波形都不一樣,采集大量數(shù)據(jù)進(jìn)行對(duì)比分析,一步步優(yōu)化算法使設(shè)備檢測(cè)精度達(dá)到最佳,同時(shí)讓設(shè)備檢測(cè)適應(yīng)范圍更廣。圖9為濾波處理前的檢測(cè)數(shù)據(jù)變化曲線(xiàn),圖10為濾波處理后的檢測(cè)數(shù)據(jù)變化曲線(xiàn)。

圖9 濾波處理前的檢測(cè)數(shù)據(jù)變化圖

圖10 濾波處理后的檢測(cè)數(shù)據(jù)變化圖
在正常情況下,同一電梯不同鋼絲繩在同一位置鋼絲繩張力均勻度應(yīng)該是接近的,不會(huì)由于電梯的運(yùn)行而導(dǎo)致鋼絲繩在不同位置的張力均勻度值發(fā)生較大變化,根據(jù)設(shè)備測(cè)量結(jié)果與實(shí)際拉力值對(duì)比是相符合的,雖然不同電梯在運(yùn)行時(shí)鋼絲繩動(dòng)態(tài)特性會(huì)產(chǎn)生變化,但均保持在合理的精度范圍之內(nèi)。同時(shí),電梯轎廂在井道上側(cè)時(shí),鋼絲繩的張力相對(duì)下側(cè)時(shí)略大,振幅相對(duì)下側(cè)略小,頻率反之。每組實(shí)測(cè)數(shù)據(jù)的標(biāo)準(zhǔn)差較小,表明各數(shù)據(jù)間分散性小,檢測(cè)裝置的重復(fù)性、穩(wěn)定性良好;相對(duì)誤差較小,表明均值與理論值較接近,檢測(cè)結(jié)果準(zhǔn)確度高。檢測(cè)精度控制在±5%以?xún)?nèi),滿(mǎn)足電梯鋼絲繩動(dòng)態(tài)安全性能的要求。實(shí)測(cè)結(jié)果如表1所示。
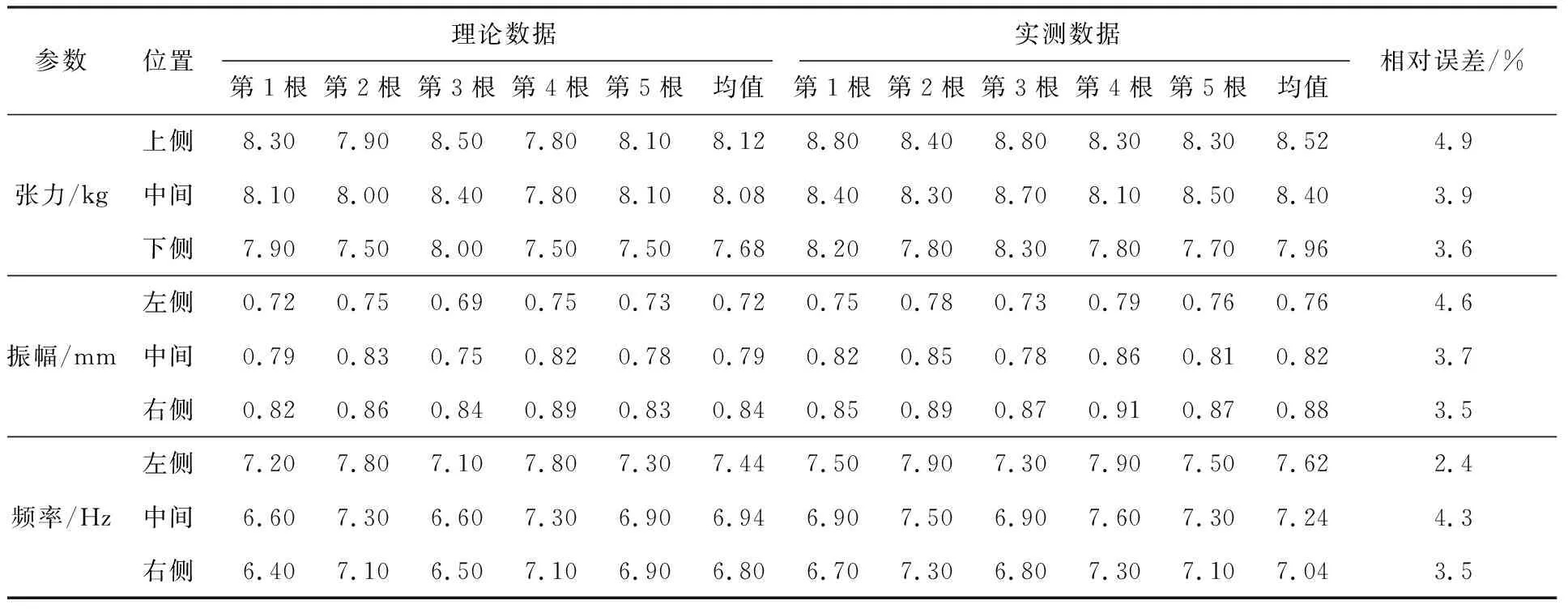
表1 實(shí)測(cè)結(jié)果
5 結(jié)語(yǔ)
本文利用新研制的檢測(cè)裝置,通過(guò)高速相機(jī)連續(xù)采集每一張圖像進(jìn)行圖像處理,然后運(yùn)用圖像處理技術(shù)和算法分析鋼絲繩的振幅、振動(dòng)相位、振動(dòng)頻率。將動(dòng)態(tài)檢測(cè)得到的檢測(cè)結(jié)果生成檢測(cè)報(bào)告,使得檢測(cè)結(jié)果更具說(shuō)服力。整體而言,該檢測(cè)裝置結(jié)構(gòu)輕巧易攜帶,操作簡(jiǎn)單,檢測(cè)結(jié)果精度高,準(zhǔn)確度、檢測(cè)穩(wěn)定性好,同時(shí)檢測(cè)結(jié)果誤差小,能滿(mǎn)足檢測(cè)精度的要求,具有較好的推廣應(yīng)用價(jià)值。該項(xiàng)技術(shù)對(duì)于高速電梯鋼絲繩的安全性檢驗(yàn)工作具有重要意義,填補(bǔ)了該領(lǐng)域無(wú)專(zhuān)業(yè)檢測(cè)儀器的空白,應(yīng)用前景廣闊。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2018年3期)2018-01-31 02:18:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
小學(xué)生時(shí)代·綜合版(2016年7期)2016-05-14 17:53:49
小說(shuō)月刊(2015年4期)2015-04-18 13:55:18
