基于核函數的目標跟蹤系統建模與仿真
2024-01-05 08:03:04甘志英
唐山師范學院學報 2023年6期
關鍵詞:特征
甘志英
(唐山學院 智能與信息工程學院,河北 唐山 063000)
目標跟蹤指根據初始圖像給定的目標位置和尺寸,對后續幀中的目標進行檢測,預測目標運動軌跡。目標跟蹤是人工智能領域重要組成部分,在無人駕駛、安保監控、視頻索引、圖像檢索等方面具有非常廣泛的應用。
近年來目標跟蹤算法的研究逐漸轉向判別類算法,如TLD 跟蹤、IVT跟蹤、相關濾波類目標跟蹤等。Bolme等[1]將目標跟蹤轉化為求兩個信號的相關問題,通過目標特征和訓練出的濾波模型在頻域計算得到目標位置,跟蹤速度明顯提高。此外,Ross等提出的IVT[2]跟蹤效果好,但實現復雜,運行速度慢,不適合實時視頻跟蹤;Zhang等[3]使用稀疏矩陣壓縮跟蹤,雖然處理速度很快,但跟蹤精度有待提高。
盡管上述算法在一定程度上提高了跟蹤準確性,但由于訓練樣本有限,跟蹤精度較低,且模型更新策略也存在不足。為此,本文在MOSSE算法的基礎上,針對訓練樣本不足、分類精度差等問題,采用循環采樣訓練濾波器,使用核函數支持向量機對目標區域建模分類,并仿真實現目標的快速跟蹤。
1 核相關跟蹤算法
本文算法是利用循環矩陣結構對樣本進行密集采樣,提高跟蹤能力。并且引入核函數處理非線性分類問題[4-7]。
1.1 引入核函數
為了提高跟蹤效果,在高維空間改善分類效果,使用高斯核函數將樣本xi映射到高維特征空間。
k(x,x′)=
(1)
根據嶺回歸,權重向量ω為
ω=∑iαiφ(xi)
(2)
其中αi為對偶空間系數。
高斯核函數滿足k(x,x)=φT(x)φ(x),則分類函數可表示為:
f(xj)=
(3)
據式(2)、(3)則目標函數(1)可表示為:
(4)
其中,K為k(x,x′)循環移位構造矩陣,λ為正則化參數。
求得改進濾波器
α=(K+λI)-1y
(5)
利用循環矩陣性質得出系數向量的頻域變量:
(6)
其中,∧符合表示對應頻域變量
1.2 濾波響應
通過所有的訓練樣本x和待檢測樣本z構建一個核循環矩陣Kz,且Kz=C(kxz),其中kxz表示訓練樣本x與檢測樣本z生成的互相關核函數向量,C(*)表示構造循環矩陣。利用核循環矩陣Kz計算當前圖像中所有待檢測樣本z的回歸響應值,計算方式如下:
f(z)=(Kz)Tα
(7)
其中f(z)包含了所有待檢測樣本的響應值。利用循環矩陣對角化的性質,可以將式(7)簡化:
(8)
對待檢測樣本z求解回歸函數相當于是在kxz上的濾波操作,輸出的二維響應圖f(z)最大值位置就是當前幀中的預測目標位置。
1.3 更新濾波器
為增強算法跟蹤魯棒性,采用實時在線更新策略,樣本目標特征和濾波器的更新:
xt=(1-η)xt-1+ηxt
(9)
(10)
其中,η為學習率,xt為第t幀樣本目標特征,αt代表第t幀濾波器。將訓練和濾波同時進行,以適應目標運動中的形變,實現目標的持續跟蹤。
2 實驗條件及方法
2.1 實驗條件
用于完成文中算法的計算機硬件配置為:CPU為AMD Ryzen 7 3700U,主頻2.30 GHz,內存8 GB;算法的軟件開發平臺為Matlab R2018b。訓練相關濾波器的正則化因子λ取0.01,高斯核函數σ取0.02,濾波器更新學習率η取0.075。
2.2 實驗方法
實驗選擇業內標準OTB2015數據集用于目標跟蹤測試,數據集包含帶目標位置標注的視頻,并且提供了合理的評價體系[8]。
TRE評估方法:從不同幀的真實目標位置開始跟蹤,對多次跟蹤指標取平均值。
Precision指標:算法估計目標位置與真實位置之間的距離小于給定閾值的幀數與總幀數的比值。一般閾值取20像素。
Success指標:算法估計目標區域與真實區域重合部分與二者合并區域比值定義為重合率。重合率大于給定閾值的幀數占總幀數的比值即為成功率。一般閾值為0.5。
為了驗證本文算法,從OTB2015數據集上選取8個具有尺度變化、快速運動、目標形變、旋轉、復雜背景的視頻序列進行測試,并使用中心位置誤差和重疊率來評估算法。此外本文還與目前比較先進的跟蹤算法MOSSE、CT、IVT進行對比。
3 實驗結果及分析
為全面直觀分析算法效果,對目標跟蹤實驗分別進行了定量分析、定性分析。
3.1 定量分析
所有跟蹤算法對8個視頻序列進行TRE測試得到的Precision指標、Success指標與跟蹤處理速度見表1。不同算法的Precision曲線和Success曲線如圖1、2所示,可以很明顯看出本文算法明顯優于其它算法。
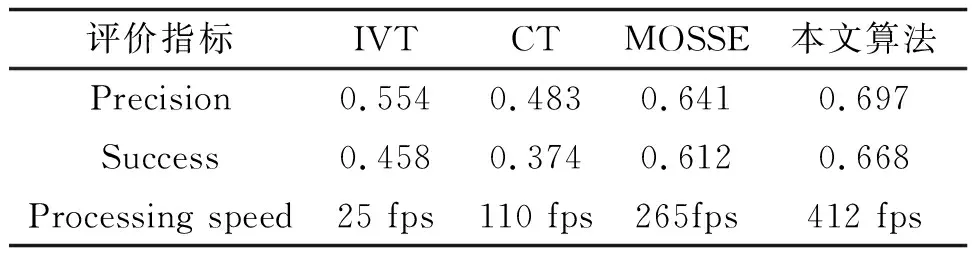
表1 算法的精度、成功率、處理速度
3.2 定性分析
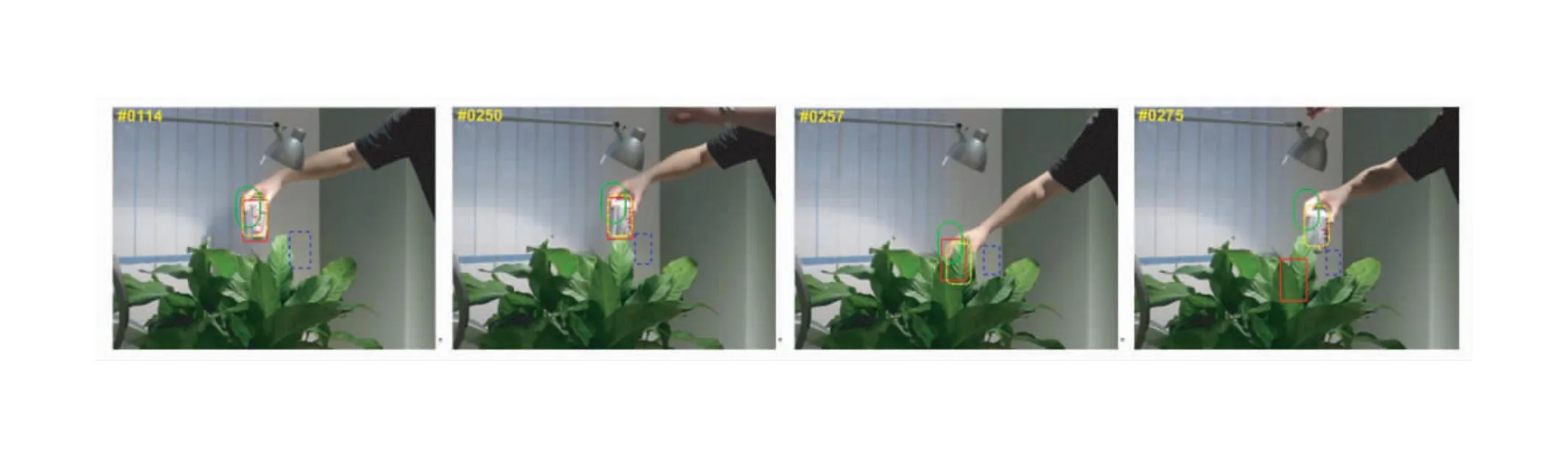
為了更直觀對比不同跟蹤算法的結果,本文算法對具有快速運動、目標形變、復雜背景、尺度變化、旋轉、遮擋等因素的視頻序列上的跟蹤結果如圖3所示。其中紅色方框標識MOSSE算法跟蹤結果,綠色橢圓對應CT算法,藍色虛線框標識IVT算法,黃色圓角矩形對應本文算法。
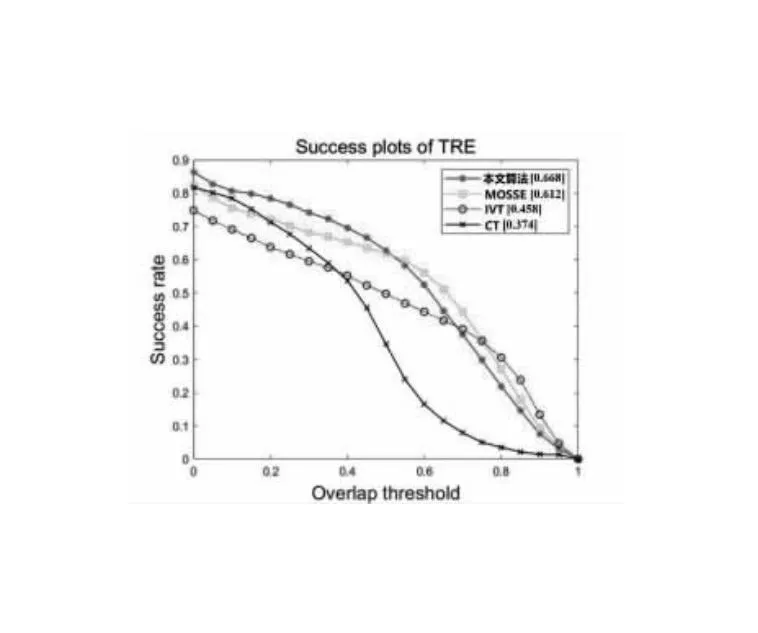
圖1 Precision曲線
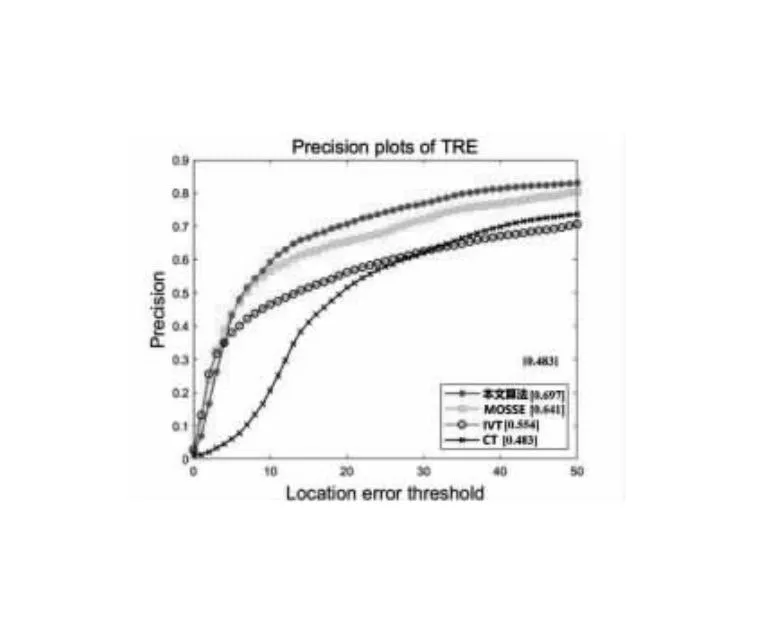
圖2 Success曲線

(a)car1尺度

(b)car4尺度 光照
(c)coke旋轉 遮擋

(e)football 復雜背景

(f)sufer 快速移動

(g)bolt快速移動 形變

(h)soccer旋轉 遮擋 背景復雜圖3 不同因素的視頻序列上的跟蹤結果
(1)快速運動。表現為相同時間內,目標移動跨度大,幀間偏移量大,帶來計算量的增多及誤差的增大,如圖3(e)(g),其它算法出現了跟蹤偏差,而本文算法密集采樣使用卷積特征,能保持較好跟蹤效果。
(2)形變旋轉。在圖3(g)(d)中,目標人的肢體運動帶來輪廓形狀變化,(c)(h)目標旋轉帶來其外觀不同,CT(綠色橢圓框)、IVT(藍色虛線框)算法未能很好地融合目標前幀與后幀信息,而在視頻的中后段部分跟蹤失敗,相反本文算法在保留前幀目標特征信息的基礎上,又學習了后幀目標的特征,這樣在目標形變的過程中就能實現更好的跟蹤。
(3)復雜背景。在圖3(e)(h)中,隨著目標運動,出現目標周圍梯度密集變化,顏色變化劇烈,背景愈加復雜。由于四種算法對目標突出特征的描述,區別于復雜背景,跟蹤效果良好。(h)中后段目標在被遮擋的情況下其它算法容易出現跟蹤漂移。
(4)尺度問題。從圖3(a)(b)中看出,目標尺度和姿態變化。四種算法跟蹤良好,但本文算法未能隨目標尺度變化而調整跟蹤窗大小,說明其欠缺尺度適應性。
(5)遮擋問題。圖3(c)(h)序列存在遮擋。本文算法使用高斯混合模型,在更新時,受到的影響較小,仍能夠正確跟蹤目標,具有較強的旋轉適應性。其它算法目標被遮擋后,將錯誤信息更新到模型中,產生了較大誤差。
(6)光照變化。圖3(b)序列中,目標從高光照進入陰影區再到高光區,本文算法使用卷積特征表示目標的外觀模型,能正確跟蹤目標,說明具備一定光照適應性。
4 結論
在相關波跟蹤算法的基礎上,采用密集采樣擴充訓練樣本集,借助核函數嶺回歸在高維空間對目標區域分類以實現目標跟蹤的方法,克服了傳統相關算法特征表達不足造成的跟蹤漂移等問題,在改善跟蹤精度的同時,通過頻域運算,提高了跟蹤速度。
在OTB2015數據集上,與多種常見跟蹤算法比較,本文算法在一些復雜場景下,具有較強的魯棒性、精確性及較高的處理速度,整體綜合性能較好,但不能自適應跟隨目標尺度變化,調整跟蹤窗大小,缺少跟蹤窗的尺度適應性。未來研究將在尺度變化場景下,朝著實現穩定的目標跟蹤方向展開進一步研究,在實時性要求下,提高跟蹤效能。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
