基于聚類(lèi)技術(shù)的梁橋荷載分布系數(shù)估算分析
2024-01-08 07:06:58曹雷
西部交通科技 2023年10期
曹 雷
(廣西威航道路工程有限公司,廣西 南寧 530012)
0 引言
有限元模型的修正主要解決優(yōu)化問(wèn)題,找到最合適的結(jié)構(gòu)參數(shù),從而最大限度地減少測(cè)量和分析結(jié)果之間的誤差[1]。在沒(méi)有交通管制的情況下,可以從環(huán)境振動(dòng)試驗(yàn)數(shù)據(jù)中獲得橋梁固有頻率和振型方面的模態(tài)特性。然而,僅校準(zhǔn)到模態(tài)特性的有限元模型不足以再現(xiàn)目標(biāo)橋梁的靜態(tài)響應(yīng),所以,模態(tài)屬性與靜態(tài)信息互補(bǔ)使用,可以提高目標(biāo)有限元分析模型在結(jié)構(gòu)性能評(píng)估中的可信度。然而,靜態(tài)位移很難在運(yùn)營(yíng)中的橋梁上進(jìn)行測(cè)量,因?yàn)樵跇蛄荷线M(jìn)行現(xiàn)場(chǎng)試驗(yàn)需要關(guān)閉橋梁,影響正常交通運(yùn)行,所以在這種情況下,可以使用荷載分布系數(shù)(LDF)來(lái)代替靜態(tài)位移。LDF是橋梁響應(yīng)的一部分,旨在表示橋梁對(duì)車(chē)輛荷載的分擔(dān)作用。因此,有關(guān)LDF和相應(yīng)車(chē)輛荷載工況的信息可用于表示目標(biāo)橋梁有限元模型的剛度特性。本文介紹了在一座寬為36.8 m的雙車(chē)道連續(xù)鋼箱梁橋上進(jìn)行的現(xiàn)場(chǎng)試驗(yàn),以及從環(huán)境車(chē)輛振動(dòng)數(shù)據(jù)中估算荷載分布系數(shù)(LDF)的后續(xù)研究。
1 荷載分布系數(shù)的估算
1.1 荷載分布系數(shù)的定義
荷載分布系數(shù)的定義是描述橋面板和梁之間復(fù)雜的荷載分布。由于現(xiàn)場(chǎng)直接測(cè)量荷載效應(yīng)比較困難,所以,通常使用荷載分量方法,如式(1)所示:
(1)
LDFi——第i片梁的LDF值;
Rmax,i——第i片梁的最大測(cè)量響應(yīng);
N——梁的數(shù)量[2]。
在有限元模型更新后,任何橋梁可以重現(xiàn)的響應(yīng)都可以使用Rmax,i表示。本研究選擇梁的靜態(tài)位移來(lái)確定Rmax,i。
1.2 擬靜態(tài)位移計(jì)算
環(huán)境振動(dòng)試驗(yàn)的動(dòng)態(tài)位移是不同頻率信號(hào)的疊加,其中,荷載作用下產(chǎn)生的位移的靜態(tài)分量可視為低頻分量,而位移的動(dòng)態(tài)分量主要對(duì)應(yīng)橋梁與車(chē)輛之間相互作用引起的高頻振動(dòng)[3]。因此,應(yīng)提取靜態(tài)分量進(jìn)行LDF估算,采用低通濾波將高于截止頻率的頻率分量濾除,只保留低頻分量。過(guò)濾之后的信號(hào)表示由車(chē)輛荷載引起的擬靜態(tài)位移,如圖1所示。
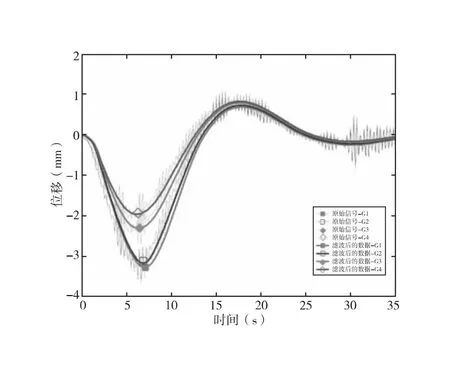
圖1 擬靜態(tài)位移曲線圖
因此,濾波后的位移峰值就是最大靜態(tài)位移,可以用來(lái)估算LDF,如圖2所示。
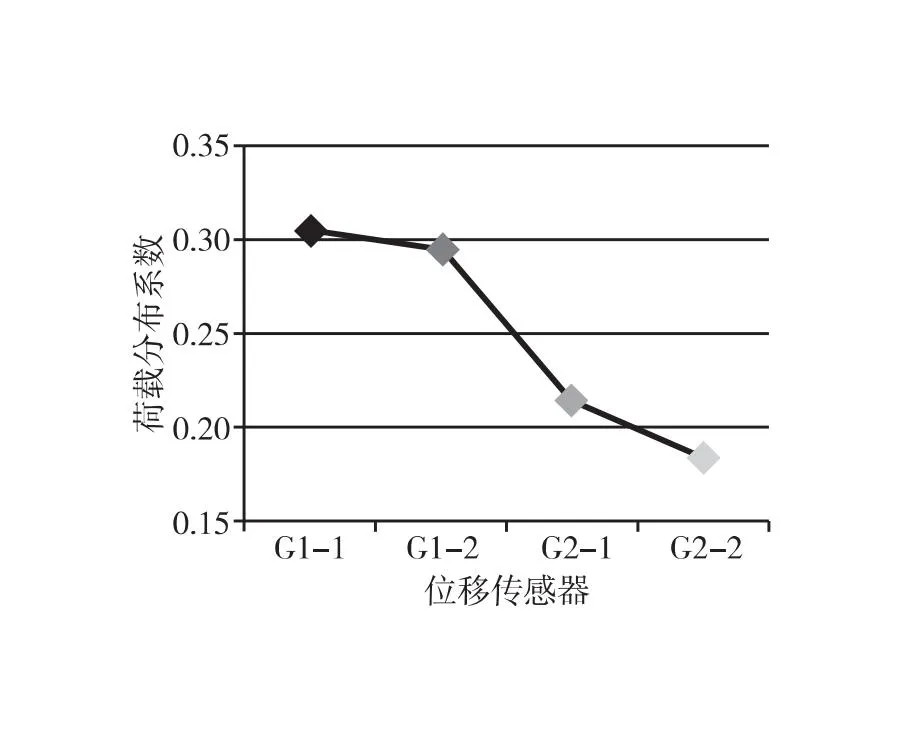
圖2 荷載分布系數(shù)曲線圖
1.3 K-means聚類(lèi)法識(shí)別車(chē)輛荷載
在從環(huán)境振動(dòng)數(shù)據(jù)中估算出LDF后,需要從行駛車(chē)輛的數(shù)量、位置以及每輛車(chē)的軸數(shù)和重量等信息確定相應(yīng)的車(chē)輛加載情況,如果不通過(guò)特殊設(shè)備進(jìn)行觀測(cè)是得不到上述交通信息的。因此,必須對(duì)已識(shí)別出的LDF進(jìn)行適當(dāng)?shù)姆治觥?/p>
為實(shí)現(xiàn)上述目標(biāo),本文研究了LDF的分布。假設(shè)密集分布的LDF是由常規(guī)車(chē)輛荷載引起的,例如某條特定車(chē)道上的車(chē)輛荷載;分散的LDF可能意味著該車(chē)輛加載情況不具有代表性或者得到的數(shù)據(jù)錯(cuò)誤。因此,研究LDF的相關(guān)性可以揭示特定的車(chē)輛加載情況。
本研究根據(jù)LDF與加載條件的相關(guān)性使用了K-means聚類(lèi)對(duì)其進(jìn)行分類(lèi)。K-means聚類(lèi)可以在沒(méi)有先驗(yàn)信息的情況下檢驗(yàn)其相關(guān)性,并把分布式的數(shù)據(jù)分類(lèi)到某些集群中[4]。通過(guò)該算法,將許多未知車(chē)輛的LDF分類(lèi)到特定的集群中,一旦確定了主要集群,就可以根據(jù)所屬LDF的共同特征推斷車(chē)輛加載情況。
2 方法應(yīng)用實(shí)例
2.1 現(xiàn)場(chǎng)試驗(yàn)
本文研究對(duì)象是一座四跨連續(xù)梁橋,主跨長(zhǎng)度為180 m,車(chē)道布置為單向雙車(chē)道,兩側(cè)護(hù)欄之間的凈寬為11.7 m。
本研究進(jìn)行了靜態(tài)和動(dòng)態(tài)加載試驗(yàn),以確定外部荷載下橋梁的結(jié)構(gòu)特性。使用兩輛裝載重物的卡車(chē)作為外部荷載,每輛卡車(chē)的總重量為260 kN,然后將4個(gè)位移傳感器安裝在橋梁第一跨中間的箱梁腹板下面,如圖3所示。
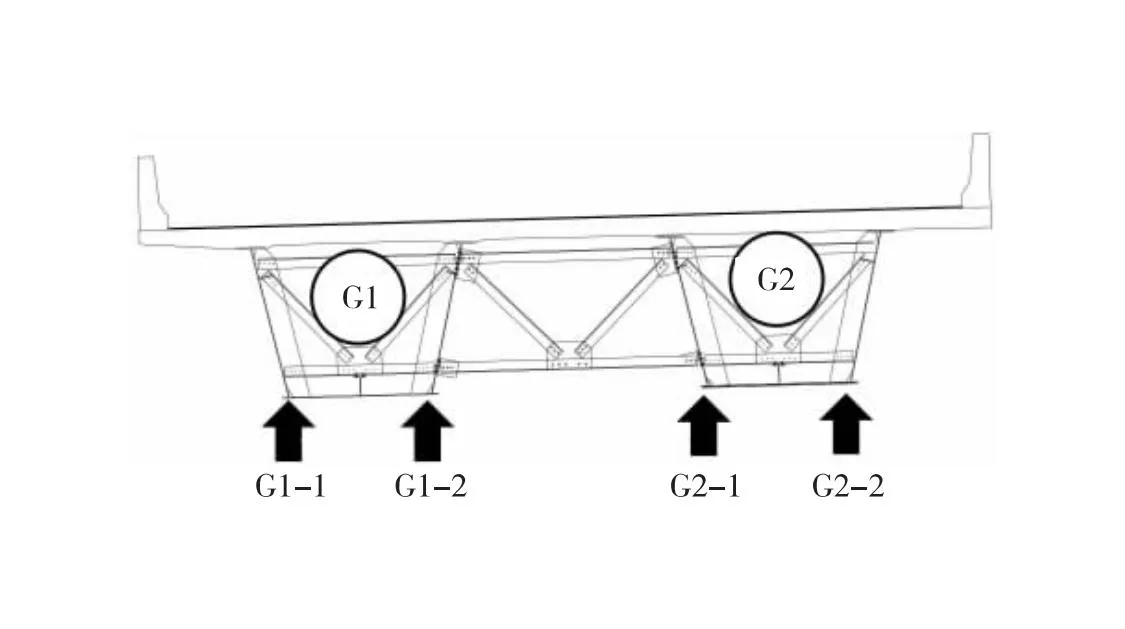
圖3 位移傳感器布置圖
試驗(yàn)卡車(chē)有五種靜態(tài)加載方案,分別是第一和第二車(chē)道上的單輛卡車(chē)的偏心加載、第一和第二車(chē)道上的兩輛卡車(chē)串聯(lián)加載以及第一和第二車(chē)道上的兩輛卡車(chē)同時(shí)并行加載。之后,在同一地點(diǎn),通過(guò)將卡車(chē)的速度改變?yōu)?0 km/h、60 km/h和100 km/h進(jìn)行與靜態(tài)試驗(yàn)相同工況的動(dòng)態(tài)加載試驗(yàn),每個(gè)動(dòng)態(tài)加載試驗(yàn)都進(jìn)行三次,以提高試驗(yàn)結(jié)果的可靠性。
除了使用上述2輛信息完善的試驗(yàn)車(chē)輛進(jìn)行試驗(yàn)外,還進(jìn)行了環(huán)境振動(dòng)試驗(yàn),在45 min內(nèi)記錄了未知車(chē)輛通行所產(chǎn)生的位移,并且還使用兩臺(tái)攝像機(jī)記錄經(jīng)過(guò)的車(chē)輛作為補(bǔ)充。
試驗(yàn)結(jié)果的驗(yàn)證方法:采用試驗(yàn)卡車(chē)產(chǎn)生的動(dòng)態(tài)位移來(lái)檢驗(yàn)所提出的方法是否真的能夠得出LDF,在經(jīng)過(guò)驗(yàn)證之后,該方法即可被應(yīng)用于環(huán)境振動(dòng)試驗(yàn)中,以便在沒(méi)有車(chē)輛信息的情況下統(tǒng)計(jì)估算LDF和相應(yīng)的車(chē)輛加載情況;通過(guò)將估算的結(jié)果與靜態(tài)試驗(yàn)結(jié)果和環(huán)境振動(dòng)試驗(yàn)中記錄的視頻數(shù)據(jù)進(jìn)行比較,進(jìn)一步驗(yàn)證該方法的有效性。
2.2 動(dòng)力試驗(yàn)
通過(guò)使用截止頻率為1 Hz的低通濾波,可以將試驗(yàn)卡車(chē)得到的動(dòng)態(tài)位移平滑為擬靜態(tài)位移。在動(dòng)態(tài)試驗(yàn)期間,當(dāng)單個(gè)試驗(yàn)卡車(chē)通過(guò)橋梁時(shí),4個(gè)位移傳感器處測(cè)量的原始位移數(shù)據(jù)和濾波位移數(shù)據(jù)如前頁(yè)圖1所示。從這組數(shù)據(jù)可以識(shí)別出一個(gè)峰值,然后計(jì)算出相應(yīng)的LDF;同理,其他動(dòng)態(tài)加載條件下的LDF也可以用這種方法進(jìn)行估算。動(dòng)態(tài)試驗(yàn)數(shù)據(jù)中所有的LDF與靜態(tài)試驗(yàn)數(shù)據(jù)中的LDF可以使用式(2)進(jìn)行比較:
(2)
LDFsta和LDFdyn分別是根據(jù)靜態(tài)和動(dòng)態(tài)試驗(yàn)數(shù)據(jù)估算出的荷載分布系數(shù),如果把LDFsta看作是代表橋梁結(jié)構(gòu)剛度特性的精確值,則其計(jì)算的誤差如圖4~7所示,其中最大誤差<7%,相當(dāng)于LDF值相差0.01。從這個(gè)結(jié)果來(lái)看,本文所提出的從動(dòng)態(tài)試驗(yàn)數(shù)據(jù)中估算LDF方法的有效性得到了驗(yàn)證。
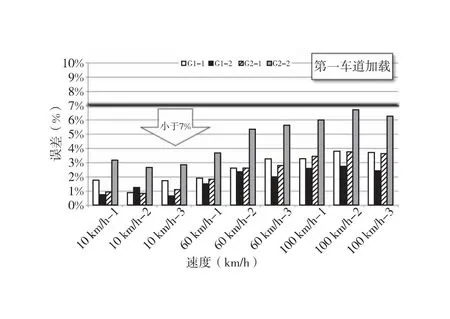
圖4 第一車(chē)道加載時(shí)不同速度下估算LDF的誤差柱狀圖
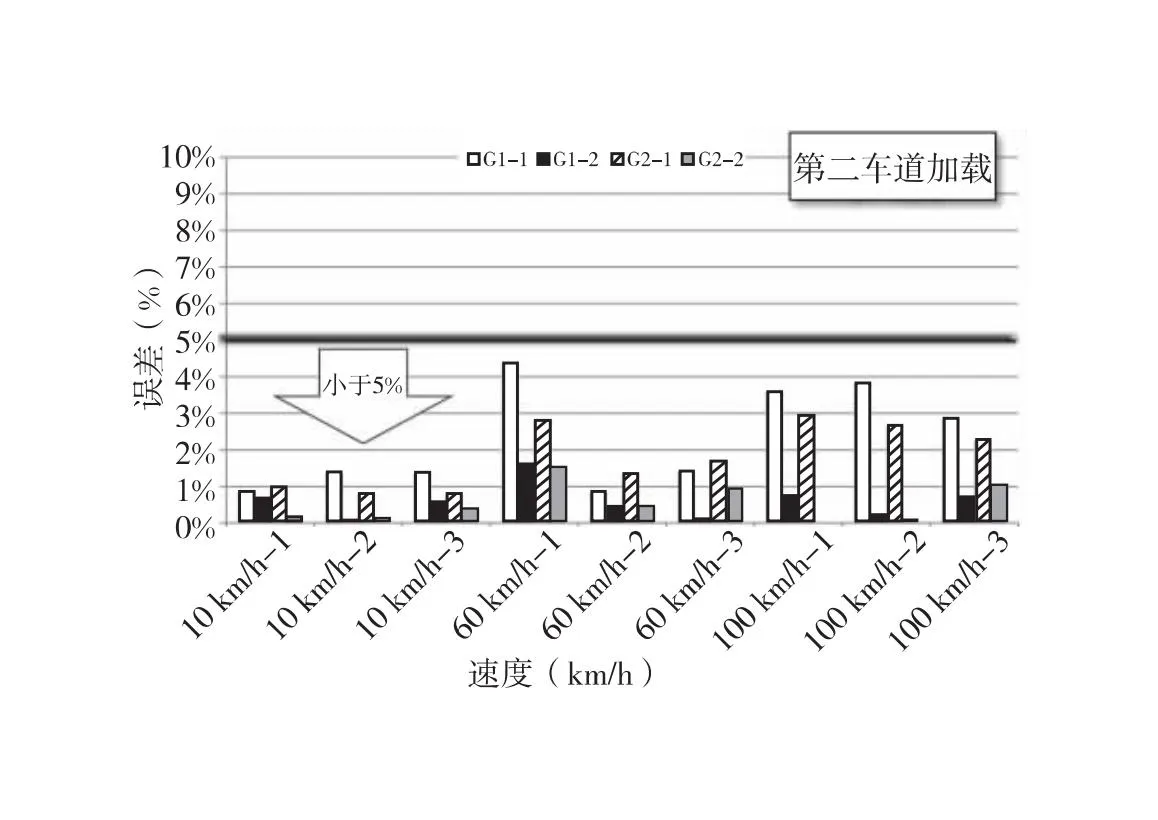
圖5 第二車(chē)道加載時(shí)不同速度下估算LDF的誤差柱狀圖
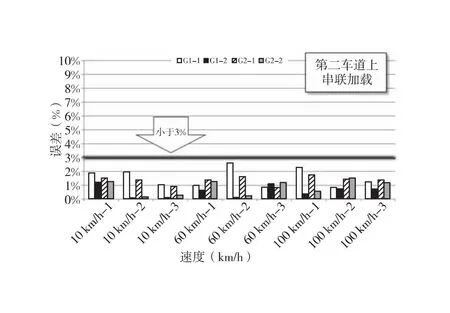
圖7 單車(chē)道串聯(lián)加載時(shí)不同速度下估算LDF的誤差柱狀圖
2.3 環(huán)境振動(dòng)試驗(yàn)
本文所提出的方法同樣適用于環(huán)境振動(dòng)試驗(yàn)所得的數(shù)據(jù)。將1 h內(nèi)位移信號(hào)的連續(xù)時(shí)間分割成圍繞重要峰值的24個(gè)信號(hào)作為預(yù)處理,并且對(duì)每個(gè)分段信號(hào)都進(jìn)行濾波以提取靜態(tài)分量,從而獲得相應(yīng)的LDF。此時(shí),由于每個(gè)分段信號(hào)中可能同時(shí)有幾輛車(chē)通過(guò),因此,需要從每個(gè)分段信號(hào)中選取幾個(gè)峰值作為L(zhǎng)DF候選值。從環(huán)境振動(dòng)試驗(yàn)數(shù)據(jù)中總共識(shí)別出62個(gè)LDF,可以提供關(guān)于車(chē)輛加載情況的相關(guān)信息。之后,通過(guò)使用K-means聚類(lèi)方法將其進(jìn)一步分為6組,其中發(fā)現(xiàn)兩個(gè)主要的集群,分別屬于32和23元素。根據(jù)兩個(gè)集群中LDF值的共同趨勢(shì),分別對(duì)其進(jìn)行分析,用以表示第一車(chē)道和第二車(chē)道的車(chē)輛加載情況。
通過(guò)將上文的方法應(yīng)用于環(huán)境振動(dòng)試驗(yàn),估算出了5個(gè)動(dòng)態(tài)位移峰值和相應(yīng)的5個(gè)LDF,如圖8所示。根據(jù)每個(gè)LDF對(duì)一號(hào)梁(G1)和二號(hào)梁(G2)的偏差,推導(dǎo)出有4輛汽車(chē)在第一車(chē)道通行,1輛汽車(chē)在第二車(chē)道通行。同時(shí),視頻中的車(chē)輛數(shù)量和經(jīng)過(guò)的車(chē)道也顯示出相同的結(jié)果。所以,在上述試驗(yàn)條件下,本文所提出的方法可以非常準(zhǔn)確地估計(jì)LDF和相應(yīng)的車(chē)輛信息。
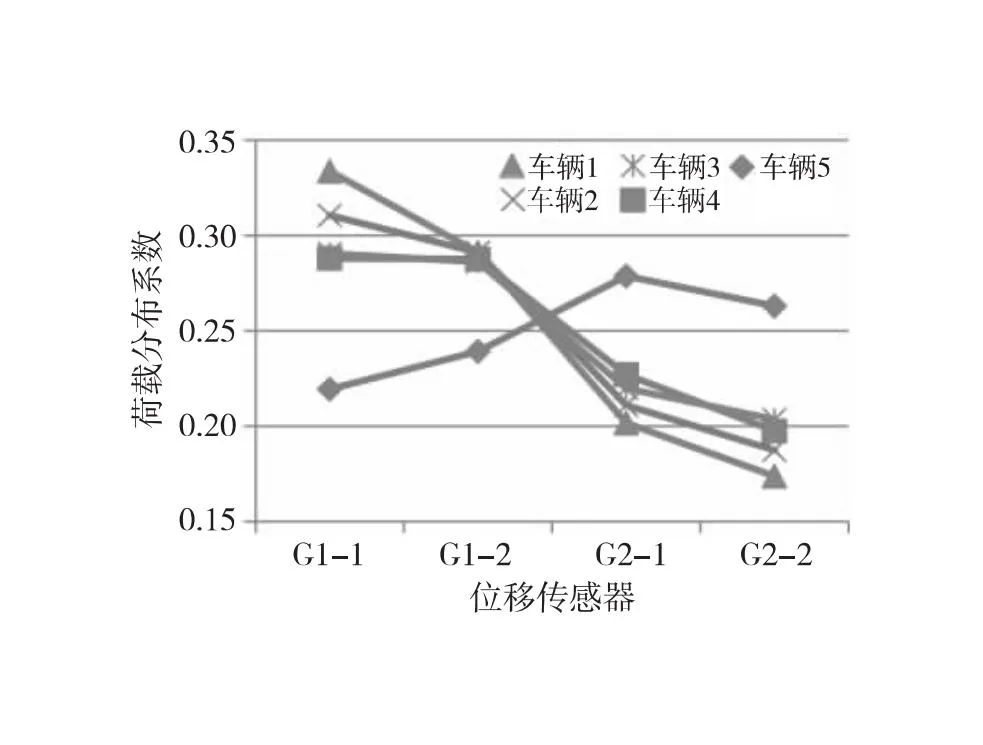
圖8 箱梁腹板的4個(gè)LDF值曲線圖
同樣,通過(guò)與視頻數(shù)據(jù)對(duì)比,可以評(píng)估其他的荷載分布因子并找出其中的差異。視頻數(shù)據(jù)記錄了共54輛車(chē)輛的通行信息,而通過(guò)LDF估算得出的車(chē)輛數(shù)量為64輛,存在一定的差異。這些差異主要對(duì)應(yīng)于殘余振動(dòng)的峰值或是數(shù)字生成的峰值,因此這些差異沒(méi)有重大的結(jié)構(gòu)意義。然而,兩個(gè)主要車(chē)道集群的LDF數(shù)量與視頻分析的結(jié)果相當(dāng)一致,分別為第一車(chē)道的32輛車(chē)和第二車(chē)道的22輛車(chē)。這一觀察結(jié)果表明,所提出的方法能夠成功地識(shí)別與車(chē)輛通行相對(duì)應(yīng)的LDF。
雖然車(chē)輛識(shí)別的數(shù)量和載荷條件已經(jīng)得到了驗(yàn)證,但是識(shí)別出的LDF準(zhǔn)確性仍需進(jìn)一步驗(yàn)證。根據(jù)式(2)計(jì)算得出的靜態(tài)試驗(yàn)數(shù)據(jù)與估算LDF之間的誤差,可以進(jìn)一步對(duì)估算出的車(chē)輛載荷條件進(jìn)行分類(lèi)。圖9展示了按K-means聚類(lèi)法分類(lèi)的結(jié)果,圖中的兩個(gè)軸分別代表每個(gè)梁的兩個(gè)LDF值。通過(guò)K-means聚類(lèi)法發(fā)現(xiàn)的兩個(gè)主要集群中,有幾個(gè)LDF因誤差較大而不足以代表第一和第二車(chē)道上的車(chē)輛載荷條件。表1總結(jié)了使用不同方法識(shí)別車(chē)輛數(shù)量的細(xì)節(jié),K-means聚類(lèi)法為主要測(cè)試方法,視頻數(shù)據(jù)及靜態(tài)測(cè)試數(shù)據(jù)為驗(yàn)證輔助測(cè)試。
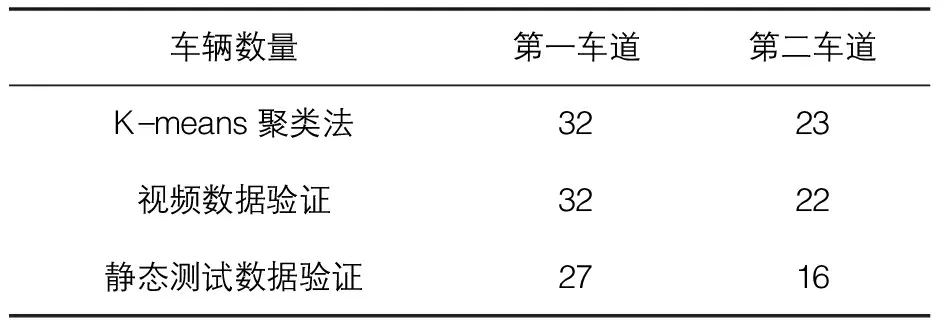
表1 三種方法識(shí)別的車(chē)輛數(shù)量細(xì)節(jié)情況表
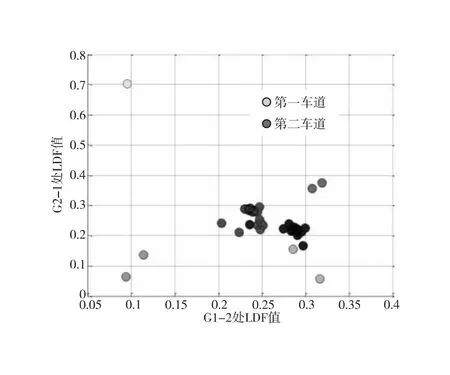
圖9 使用K-means聚類(lèi)法分類(lèi)后的LDF值示意圖
盡管每輛車(chē)的加載位置和規(guī)格都不同,由重型車(chē)輛通行產(chǎn)生的LDF卻顯示出高準(zhǔn)確性。因此,在環(huán)境振動(dòng)試驗(yàn)數(shù)據(jù)的基礎(chǔ)上估算LDF是必要的,可最大程度地利用重型車(chē)輛的響應(yīng)數(shù)據(jù),提高整體的估算精度。
3 結(jié)語(yǔ)
本文介紹了在一座雙車(chē)道連續(xù)鋼箱梁橋上進(jìn)行的現(xiàn)場(chǎng)試驗(yàn)和后續(xù)研究,從環(huán)境車(chē)輛振動(dòng)數(shù)據(jù)中估算了荷載分布系數(shù)(LDF),用于梁橋的結(jié)構(gòu)識(shí)別。通過(guò)對(duì)橋梁環(huán)境振動(dòng)試驗(yàn)數(shù)據(jù)的動(dòng)態(tài)位移信號(hào)進(jìn)行濾波,得到擬靜態(tài)位移,然后從擬靜態(tài)位移的峰值中估算出LDF,并將這些LDF歸類(lèi)為幾個(gè)主要集群。
通過(guò)K-means聚類(lèi)法將上述LDF劃分為不同的集群,然后比較分析視頻數(shù)據(jù)和靜態(tài)試驗(yàn)數(shù)據(jù)的誤差結(jié)果,即可驗(yàn)證所提出的方法的有效性。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
瘋狂英語(yǔ)·新讀寫(xiě)(2020年3期)2020-06-06 09:05:56
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2019年4期)2019-04-22 03:28:24
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
中國(guó)公路(2017年11期)2017-07-31 17:56:30
中國(guó)公路(2017年10期)2017-07-21 14:02:37
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:04