基于語音識別處理的植保無人機航行路徑控制研究
2024-01-11 07:54:58程永紅
農機化研究 2024年2期
關鍵詞:模型
程永紅,王 萌
(1.河北工業職業技術大學,石家莊 050091;2.河北公安警察職業學院,石家莊 050091)
0 引言
植保無人機指用于農林作業的無人機,可以通過地面遙控或內置驅動程序實現作物田間巡視、施肥、施藥和播種等作業。本文研究的基于語音識別處理的植保無人機航行路徑控制系統,可以實現對植保無人機的語音控制和動態避障的航行路徑規劃。
1 語音識別處理
1.1 識別算法數學模型
語音識別算法的數學模型由聲道、輻射和激勵3個模型組成,如圖1所示。

圖1 語音識別算法數學模型結構圖Fig.1 The structure diagram of mathematical model of speech recognition algorithm
其中,聲道模型V(z)根據發某個音時獲取聲道不同的諧振頻率,形成共振峰,作為聲道傳輸函數模型;輻射模型R(z)采用高通濾波器對語音信號進行處理,R(z)表示輻射阻抗;激勵模型G(z)表示聲門脈沖信號;A表示模型調節系數值,用來調整函數能量幅值。語音識別算法模型的核心是確定語音信號進行轉換所需的輸出函數H(z),其表達式為
H(z)=A·G(z)V(z)R(z)
(1)
1.2 識別算法預處理流程
將發音的模擬信號通過AD采樣為數字信號,再對基于倍頻衰減信號進行離散化預處理,從而使語音數字信號的高頻信號突出,方便分辨和進行分析。一階數字信號濾波器進行離散化處理方程式為
H(z)=1-uz-1
(2)
其中,u∈[0,1]為離散系數。
設x(n)為某一個時間點n對應的值,經過預處理后可得
y(n)=x(n)-kx(n-1)
(3)
其中,k為高頻信號取值系數比值,一般取常數0.9。
1.3 語音信號特征提取
語音識別精度與算法提取語音特征的準確度有關。在此,采用MFCC對語音信號進行提取,其過程如圖2所示。

圖2 語音信號特征提取過程Fig.2 The feature extraction process of speech signal
1.4 HMM語音識別算法
采用HMM(隱馬爾可夫模型)算法進行語音的識別處理,該算法第1步是創建語音詞匯表。設該表格共有N個詞匯,模型系數λn和N個詞匯一一對應,則
λn=(An,Bv,πv)
(4)
在進行語音識別的過程中,首先提取監測矢量O={o1,o2,…,oT};然后求出模型系數λn的分配概率P(O|λ);最后在其中篩選出概率最大的詞匯n*,也就是該詞匯識別的結果,即
(5)
實現語音的識別后,便可以進行植保無人機的指令識別,其主要步驟如下:①每條指令采集100次,并對其進行預處理和特征參數提取;②利用提取出來的特征參數對每條植保無人機指令訓練出一個HMM模型;③在識別過程中,對獲取的指令進行預處理和特征提取,再計算每個識別模型的匹配概率。其中,概率最大的模型對應的無人機語音指令就是識別結果。
2 植保無人機的結構與工作原理
本文研究的植保無人機采用旋翼式設計,整體結構主要由機身和4個旋翼組成,主要靠旋翼旋轉產生的動力驅動無人機朝X、Y和Z三軸進行平移或者旋轉運動。旋翼旋轉中會產生反向扭矩力,會對植保無人機控制產生不利影響。為了防止這種反向的扭矩力的不利影響,需要將4個旋翼安裝在同一個平面,然后對角的兩個分為1組,在飛行過程中采用相同的旋轉方向。植保無人機整體結構如圖3所示。

圖3 植保無人機整體結構Fig.3 The overall structure of plant protection UAV
圖3中,植保無人機采用“十字”型結構,旋翼1和旋翼3這組采用順時針方向旋轉,另外一組則采用相反的方向旋轉。植保無人機工作原理和傳統的飛行器有較大差別,其旋翼是固定的,位置和姿態只能依靠轉速變化進行控制。
植保無人機的基本運動方式包括垂直、俯仰、滾轉和偏航4種,介紹如下:
1)垂直運動。植保無人機依據旋翼帶來的升力和無人機自重的關系,便可以實現其垂直上下運動:①當植保無人機總升力大于其自重時,會垂直上升;②當植保無人機總升力等于其自重時,會懸停在空中;③當植保無人機總升力小于其自重時,會垂直下降。
2)俯仰運動。植保無人機的俯仰運動往往需要搭配著前后運動。提高旋翼2的轉速和降低旋翼4的轉速,或者反過來,提高旋翼4的轉速和降低旋翼2的轉速,同時保持旋翼1和旋翼3的轉速,那么旋翼4和旋翼2就會出現壓力差,從而總升力會產生一個前后的分量;而若此時植保無人機總升力等于其自重,那么植保無人機就會進行前后運動。
3)滾轉運動。植保無人機的滾轉運動和俯仰運動類似,提高旋翼1的轉速和降低旋翼3的轉速,或者反向操作,同時保持旋翼2和旋翼4的轉速,那么旋翼1和旋翼3就會出現向左或者向右的壓力差;若此時植保無人機總升力等于其自重,那么植保無人機就會進行滾轉運動。
4)偏航運動。植保無人機的偏航運動不需要依靠4個旋翼的壓力差,而是靠旋翼的反扭矩力。在植保無人機懸停時,控制對角的兩個旋翼同時提高或者降低轉速,保證1組對角旋翼提高轉速、1組對角降低轉速;而植保無人機總升力等于其自重時,會出現反扭矩力,植保無人機就會在原來的位置上進行順或逆時針的偏航運動。
3 人工勢場法
利用人工勢場法對植保無人機的航行路徑與控制進行分析,算法的基本思路是建立一個人工勢場。植保無人機、目標地點和障礙物都是其中的帶電粒子;植保無人機和障礙物帶負電荷,目標地帶正電荷,根據同性排斥和異性吸引的原理,勢函數的下降方向就是最優的路徑。人工勢場法工作原理示意如圖4所示。

圖4 人工勢場法工作原理示意圖Fig.4 The schematic diagram of working principle of artificial potential field method
傳統人工勢場的引力計算為
Uat(P)=ξ‖Pgoal-P‖m
(6)


圖5 人工勢場法的引力場模型圖Fig.5 The gravitational field model diagram of artificial potential field method
由圖5可以看出,人工勢場法的負梯度為

(7)
該負梯度的值會隨著植保無人機和終點距離的減小而逐漸至0。植保無人機的航行路徑規劃,終點并不是一直單一靜止的,由于飛行過程中會經常出現障礙物,故需要動態的對飛行路徑進行規劃。人工勢場引力示意如圖6所示。

圖6 人工勢場引力示意圖Fig.6 The schematic diagram of artificial potential field gravity
圖6中,若終點附近有障礙物時,隨著植保無人機的飛近,也會受到障礙物的斥力,導致終點附近的總勢能不是最小。因此,對傳統人工勢場進行一定改進,定義為
Uat(P,V)=ξp‖Pgoal(t)-P(t)‖m+
lv‖Vtar(t)-V(t)‖n
(8)
其中,Vtar(t)和V(t)分別表示終點和植保無人機在t時刻的移動速度;ξp、lv表示正參數;m和n表示勢場系數。那么,改進后的引力勢場負梯度表達式為
Fat(p,v)=-?Uat(p,v)
=-?pUat(p,v)-?vUat(p,v)
(9)

(10)

(11)
聯立式(8)和式(9)可得
Fat(p,v)=Fat1(p)+Fat2(v)
(12)
Fat1(p)=kξp‖Ptar(t)-p(t)‖mNprt
(13)
Fat2(v)=flv‖Vtar(t)-V(t)‖nNvrt
(14)
其中,Nprt為植保無人機指向終點的單位矢量;Nvrt為植保無人機與終點相對速度的單位矢量。
4 基于人工勢場法的植保無人機航行路徑控制算法研究
人工勢場法是將植保無人機作業區域進行一種抽象的描述,目的是使植保無人機在作業過程中避開障礙物,順利飛到終點。基于改進人工勢場法的植保無人機航行路徑控制算法程序如圖7所示。

圖7 采摘機器人動態路徑規劃程序框圖Fig.7 The dynamic path planning program block diagram of picking robot
圖7中,首先植保無人機會進行算法初始化設置,再根據算法計算植保無人機當前受到的勢場合力;然后,確定當前的航向角、速度及探測周邊是否有障礙物,并計算出引入障礙物斥力后的合力,對植保無人機的航向和速度進行調節;最后,計算植保無人機下一時刻的位置,判斷其是否已經到達目標位置或達到最大迭代次數,若是則完成當前任務,否則繼續進行前面的流程,直至達到目標位置或者到達最大迭代次數。
5 仿真研究
為了驗證基于語音識別處理的植保無人機航行路徑控制算法的可靠性,在同一天的3個時間段進行實際的植保無人機巡視作業。試驗中,采用語音控制設置植保無人機運動模式,測試數據如表1所示。表1中,“Zero”表示垂直向上飛,“One”表示垂直向上降,“Two”表示向左翻轉,“Three”表示向右翻轉,“Four”表示空中懸停,“Five”表示從當前位置飛到設定的終點。
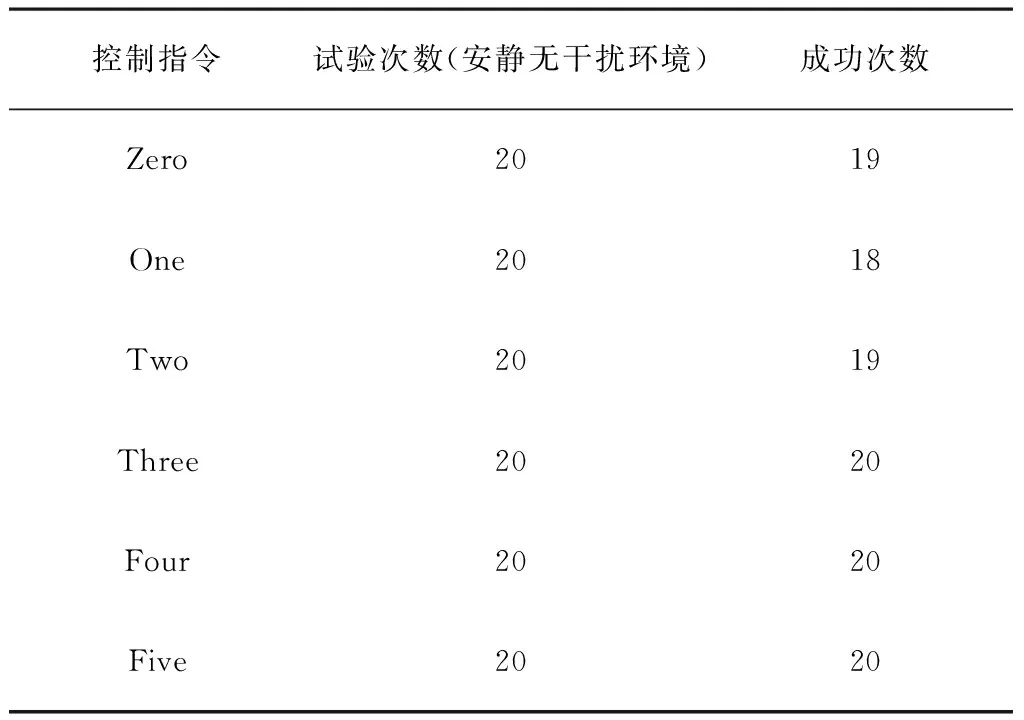
表1 測試結果Table 1 The test results
由表1可以看出:語音控制控制準確度非常高,達到了90%及以上,證明了植保無人機語音控制系統的可靠性。
另外,為了驗證植保無人機航行路徑控制算法,還對植保無人機從當前位置飛到設定的終點的路徑進行分析。植保無人機避障航跡軌跡如圖8所示。

圖8 植保無人機避障航跡軌跡圖Fig.8 The trajectory diagram of obstacle avoidance track of plant protection UAV
由圖8可以看出:基于改進后的人工勢場算法,障礙物斥力會隨著植保無人機靠近終點而減弱,終點產生的引力遍及全部地圖,而障礙物的斥力影響只作用在其影響范圍內。試驗證明:基于改進人工勢場算法的植保無人機航行路徑控制準確,能夠成功避開障礙物,并動態規劃最優飛行路徑。
6 結論
基于語音識別處理和改進人工勢場算法,對植保無人機的飛行控制和航行軌跡規劃進行分析研究,可以實現通過語音傳達植保無人機的操控指令以及植保無人機的動態避障和航行路徑規劃。試驗結果表明:①語音控制控制準確度非常高,達到了90%及以上;②植保無人機航行路徑控制準確,能夠成功避開障礙物,并動態規劃最優飛行路徑。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
