胡蘿卜聯(lián)合收獲挖掘部件運(yùn)動(dòng)及力學(xué)特性分析
2024-01-11 07:54:58邵珠同王家勝趙智豪張德成
農(nóng)機(jī)化研究 2024年2期
邵珠同,王家勝,趙智豪,張德成,劉 勇
(青島農(nóng)業(yè)大學(xué) 機(jī)電工程學(xué)院,山東 青島 266109)
0 引言
胡蘿卜屬于深根莖類蔬菜作物,當(dāng)前胡蘿卜聯(lián)合收獲機(jī)大多采用挖拔組合式的收獲方式[1],可連續(xù)實(shí)現(xiàn)胡蘿卜的挖掘、拔取、輸送、根秧分離、清土與集收等功能[2]。其中,挖掘部件結(jié)構(gòu)與工作參數(shù)的合理匹配不僅有效降低了工作阻力,而且有助于胡蘿卜植株的平順喂入、精準(zhǔn)部位夾持和順利拔起,從而減少漏收,避免收獲過程中的壅堵。針對(duì)胡蘿卜收獲挖掘裝置,王金武等以狗獾爪趾為仿生原型,對(duì)挖掘鏟減阻機(jī)理進(jìn)行設(shè)計(jì)分析[3],挖掘阻力和漏拔率均能得到降低。李凱峰分別對(duì)胡蘿卜挖掘的三角鏟、鑿型鏟進(jìn)行了田間對(duì)比試驗(yàn)分析,發(fā)現(xiàn)鑿型鏟在漏挖率和損傷率方面略低于三角鏟,但鑿型鏟相比于三角鏟壅土現(xiàn)象更嚴(yán)重[4]。王家勝等構(gòu)建了反映挖掘鏟工作阻力影響因素的機(jī)械-土壤系統(tǒng)四元件力學(xué)模型[5],設(shè)計(jì)了一種兩翼分開的三角狀胡蘿卜挖掘鏟,通過可調(diào)入土角適應(yīng)不同土壤條件要求[6]。劉強(qiáng)等利用EDEM動(dòng)力學(xué)仿真和試驗(yàn)相結(jié)合的方法,研究機(jī)械拔取過程中胡蘿卜與土壤交互作用機(jī)理,分析了胡蘿卜拔取力的影響因素[7]。
我國(guó)胡蘿卜聯(lián)合收獲裝備的研究才剛剛起步,關(guān)于挖掘部件-土壤間互作力學(xué)特性的研究還不夠深入[8-11]。為此,以挖拔組合式胡蘿卜聯(lián)合收獲機(jī)中挖掘部件作為研究對(duì)象,重點(diǎn)研究分析挖掘鏟的入土行程運(yùn)動(dòng)及鏟土互作力學(xué)特性,探索胡蘿卜挖掘部件結(jié)構(gòu)與工作參數(shù)的最佳匹配關(guān)系,為實(shí)現(xiàn)胡蘿卜聯(lián)合收獲機(jī)各功能環(huán)節(jié)有效銜接、避免壅堵以及降低漏收率和工作阻力提供理論和技術(shù)支撐。
1 挖掘鏟-土壤力學(xué)互作理論分析
1.1 挖拔組合收獲裝置結(jié)構(gòu)與原理
處于工作狀態(tài)的挖拔組合式胡蘿卜聯(lián)合收獲裝備的主要結(jié)構(gòu)及原理如圖1所示。整機(jī)由扶禾喂入裝置、夾拔輸送裝置、根秧切割裝置、清土集收裝置及動(dòng)力行走裝置組成。工作時(shí),動(dòng)力底盤的履帶沿壟溝行走推動(dòng)整機(jī)前進(jìn),收獲時(shí)扶禾喂入部件首先將胡蘿卜秧葉分行扶起并導(dǎo)引喂入夾拔輸送裝置;挖掘部件固定在收獲支架上,在油缸的伸縮作用下隨收獲支架繞主軸轉(zhuǎn)動(dòng)實(shí)現(xiàn)升降;挖掘鏟在下降和前進(jìn)過程中,從上壟面入土至設(shè)定深度進(jìn)行挖掘松土,將生長(zhǎng)土中的胡蘿卜鏟松,并由夾持帶夾住秧葉后將胡蘿卜植株從土中拔起后輸送,在輸送過程中進(jìn)行根秧切割分離,接著完成去土清雜和集收。收獲流程中,挖掘部件承受著最大的工作阻力,其挖掘松土功能是銜接胡蘿卜植株喂入與夾拔輸送的關(guān)鍵環(huán)節(jié)。土壤被挖掘部件鏟挖后產(chǎn)生碎裂,為胡蘿卜植株順利拔起、避免拔斷創(chuàng)造了條件,但土壤翻涌以及胡蘿卜植株姿態(tài)擾動(dòng)也對(duì)秧葉的穩(wěn)定喂入和精確部位夾持產(chǎn)生不利影響[12-14]。挖掘部件合理的結(jié)構(gòu)與工作參數(shù)匹配,是確保平順入土、低阻挖掘以及有序平穩(wěn)喂入夾拔的關(guān)鍵。
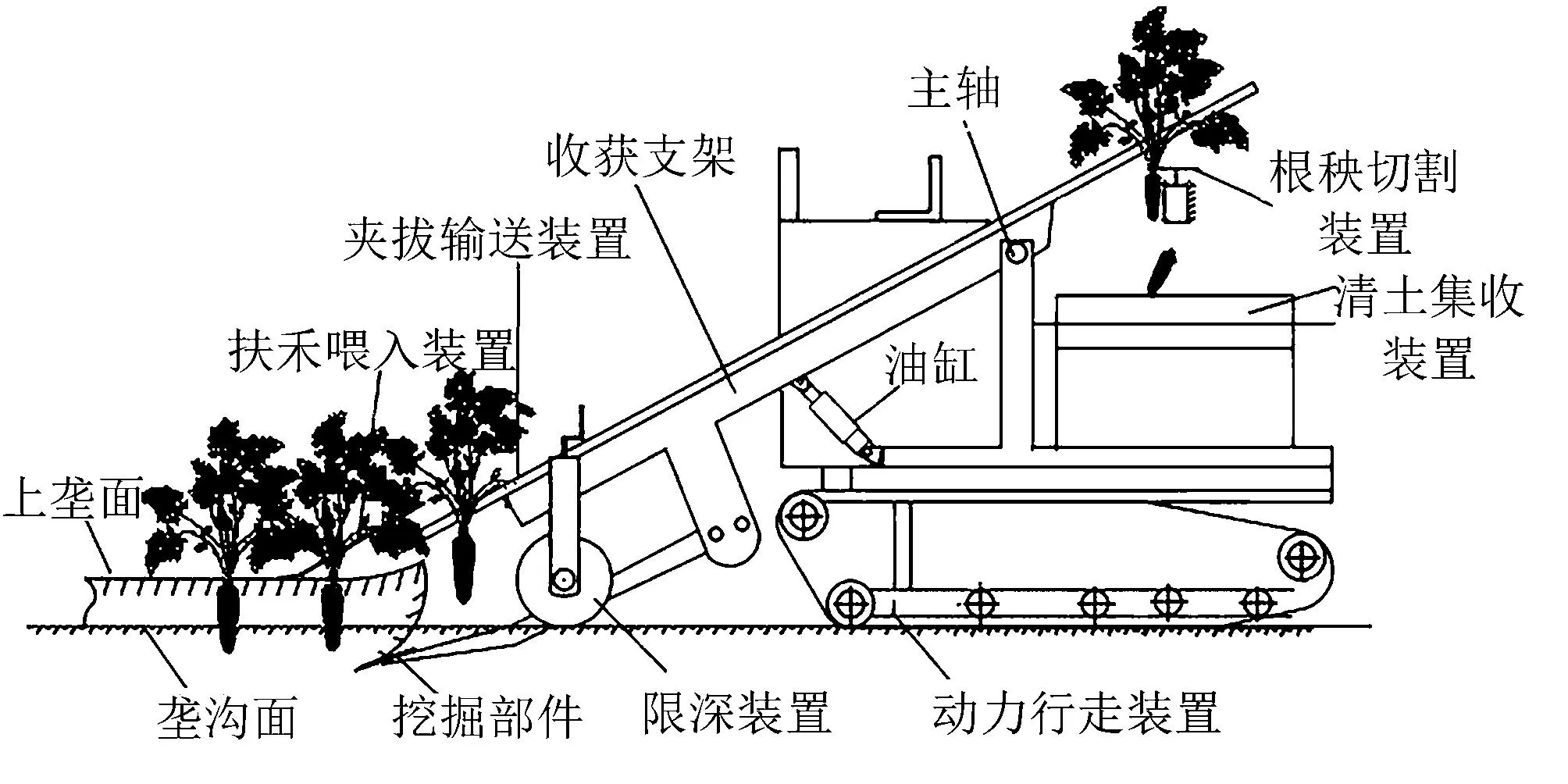
圖1 挖拔組合式胡蘿卜聯(lián)合收獲裝備結(jié)構(gòu)Fig.1 Structure of digging and pulling combined carrot combine harvester
1.2 挖掘部件入土過程理論分析
1.2.1 挖掘部件入土行程分析
挖掘部件的入土過程如圖2所示。工作時(shí),挖掘部件前進(jìn)過程中從壟面A點(diǎn)開始入土,逐漸深入達(dá)到土下B點(diǎn)規(guī)定入土深度H,并保持規(guī)定深度挖掘松土。入土深度、入土行程和入土角是表征入土過程的主要參數(shù)。其中,入土行程S是指挖掘部件從鏟尖觸地開始至達(dá)到規(guī)定入土深度止所經(jīng)過的水平距離。入土角度又分為初始入土角和最終入土角,挖掘部件在A點(diǎn)的初始入土角為γ0,到達(dá)B點(diǎn)規(guī)定深度時(shí)的最終入土角為γ1,鏟尖從A至B的運(yùn)動(dòng)是沿前進(jìn)方向的水平運(yùn)動(dòng)與繞主軸O逆時(shí)針轉(zhuǎn)動(dòng)的平面復(fù)合運(yùn)動(dòng)。因此,挖掘部件的入土角隨著入土過程逐漸變大,即γ1>γ0。在相同前進(jìn)速度下,入土角越大,入土性能越好,入土速度越快,故入土軌跡AB是一條斜率遞增的拋物曲線。

圖2 挖掘部件入土過程Fig.2 Soil penetration travel of digging component
1.2.2 挖掘部件入土角數(shù)學(xué)建模與分析
為了方便建立入土深度、入土角、入土行程及挖掘部件結(jié)構(gòu)間的關(guān)聯(lián)關(guān)系,并揭示入土過程的影響因素,將挖掘部件運(yùn)動(dòng)分解為先水平運(yùn)動(dòng)再繞主軸轉(zhuǎn)動(dòng)兩個(gè)分運(yùn)動(dòng),其運(yùn)動(dòng)關(guān)系如圖3所示。挖掘鏟可看作先從A點(diǎn)平移到A1點(diǎn),再由A1點(diǎn)繞主軸逆時(shí)針轉(zhuǎn)動(dòng)至B點(diǎn),繞主軸轉(zhuǎn)動(dòng)的角度為入土角的變化量,即

圖3 挖掘部件入土運(yùn)動(dòng)關(guān)系Fig.3 Soil penetration movement relation of digging component
Δγ=γ1-γ0
(1)
式中 Δγ-挖掘部件繞主軸轉(zhuǎn)角(rad);
γ1-最終入土角(rad);
γ0-初始入土角(rad)。
根據(jù)挖掘部件繞主軸轉(zhuǎn)角及主軸心到鏟尖的長(zhǎng)度,可求得鏟尖劃過的弧長(zhǎng),即
ΔC=Δγ·L=(γ1-γ0)·L
(2)
式中 ΔC-鏟尖劃過的弧長(zhǎng)(m);
L-主軸心到鏟尖的長(zhǎng)度(m)。
由于L>>ΔC,則ΔC≈A1B,則可建立入土深度與入土角之間的關(guān)系式,即
H=A1B·cos∠A1BC
=(γ1-γ0)·L·cos∠A1BC
(3)
式中H-入土深度(m);
A1B-鏟尖劃過的直線長(zhǎng)度(m);
∠A1BC-A1B與水平面夾角(rad)。
由圖3所示的運(yùn)動(dòng)幾何關(guān)系可知
∠A1BC=π-γ1-α-β
(4)
(5)
其中,α為挖掘部件-收獲支架結(jié)構(gòu)角,與挖掘部件與收獲支架結(jié)構(gòu)有關(guān);β為OB與A1B夾角(rad)。
聯(lián)合式(3)~式(5),可得
(6)
式(6)反映了入土角與入土深度和挖掘收獲支架結(jié)構(gòu)參數(shù)之間的函數(shù)關(guān)系,最終入土角γ1是在初始入土角γ0基礎(chǔ)上增大而得,所以初始入土角設(shè)置越大,最終入土角也越大。盡管較大的入土角可加快入土速度,從而縮短入土行程,但入土角的增加也會(huì)增大挖掘阻力和機(jī)器耗能,且入土角增大后土壤被鏟挖過程中更容易涌起,不利于秧葉的夾拔,造成堵塞和漏收。因此,在保證挖掘部件能夠入土的條件下,盡量減小入土角,以保證較小的工作壓力和胡蘿卜植株的平穩(wěn)夾拔。根據(jù)式(6),在初始入土角確定的前提下,最終入土角隨入土深度H的增大而增大,隨鏟尖到主軸間距L的增大而減小,即收獲支架長(zhǎng)度的增大有助于最終入土角的減小。另外,最終入土角還與挖掘部件結(jié)構(gòu)角α有關(guān),挖掘部件與收獲支架連接點(diǎn)離地間隙越小,結(jié)構(gòu)角α越大,則最終入土角會(huì)相應(yīng)變小。入土深度是由胡蘿卜生長(zhǎng)深度決定,則最終入土角可由初始入土角、挖掘部件以及收獲支架結(jié)構(gòu)參數(shù)的優(yōu)化設(shè)計(jì)確定。
1.2.3 挖掘部件-土壤力學(xué)建模與分析
挖掘部件受到的外力來自于土壤對(duì)鏟的阻力、主軸對(duì)收獲支架的推力以及限深部件受到的力。挖掘深度調(diào)節(jié)方法通常采用高度調(diào)節(jié)和位調(diào)節(jié)兩種方法。其中,高度調(diào)節(jié)法是利用設(shè)置限深輪與鏟尖之間的相對(duì)距離來調(diào)節(jié)挖掘深度,此時(shí)起升油缸處于浮動(dòng)狀態(tài),不受力;位調(diào)節(jié)法是無限深輪,完全利用液壓油缸來支撐挖掘部件的下陷力,以維持預(yù)定挖掘深度。圖4(a)、(b)分別為高度調(diào)節(jié)和位調(diào)節(jié)兩種調(diào)節(jié)方法下挖掘部件受力圖。對(duì)高度調(diào)節(jié)挖掘部件進(jìn)行受力分析時(shí),挖掘鏟受到土壤作用力可簡(jiǎn)化為與前進(jìn)方向阻力R1和垂向壓力R2;限深輪受到的地面土壤作用力可分解為垂向支持力N和水平滾動(dòng)摩擦力F;收獲支架末端受到主軸作用力分解為水平方向推力P1和垂向拉力P2。位調(diào)節(jié)挖掘部件在挖掘鏟和收獲支架末端受力與高度調(diào)節(jié)挖掘部件受力相同,不同點(diǎn)是收獲支架升降點(diǎn)受到液壓油缸的垂向支持力U1和水平推力U2代替了限深輪的受力。因此,以主軸心O點(diǎn)為簡(jiǎn)化中心,建立主力矢和主力矩的平衡方程,高度調(diào)節(jié)挖掘部件受力平衡方程為

圖4 挖掘部件受外力圖Fig.4 External force diagram of digging component
P1-R1-F=0
(7)
N-P2-R2=0
(8)
R1l2+R2l2+Fl2-Nl4=0
(9)
式中P1-主軸對(duì)收獲支架末端水平推力(N);
P2-主軸對(duì)收獲支架末端垂向拉力(N);
R1-土壤對(duì)挖掘鏟前進(jìn)方向阻力(N);
R2-土壤對(duì)挖掘鏟垂向壓力(N);
N-地面土壤對(duì)限深輪垂向支持力(N);
F-土壤對(duì)限深輪的滾動(dòng)摩擦力(N);
l1、l2、l3、l4-挖掘鏟和限深輪受力點(diǎn)到主軸心的水平和垂向距離(m)。
位調(diào)節(jié)挖掘部件受力平衡方程為
P1+U2-R1=0
(10)
U1-P2-R2=0
(11)
R1l2+R2l1-U1l6-U2l5=0
(12)
式中U1-液壓油缸對(duì)收獲支架垂向支持力(N);
U2-液壓油缸對(duì)收獲支架水平推力(N);
l5、l6-液壓油缸對(duì)收獲支架支撐點(diǎn)到主軸心的水平和垂向距離(m)。
根據(jù)式(7)~式(9),高度調(diào)節(jié)挖掘部件在水平方向的阻力除了來自挖掘鏟水平挖掘阻力R1之外,還包括限深輪的滾動(dòng)摩擦阻力F。滾動(dòng)阻力F與垂向支持力N的大小成正比,而限深輪垂向支持力N=P2+R2,在相同作業(yè)條件下R2保持不變,P2隨限深輪位置參數(shù)l4的減小而增大。因此,限深輪應(yīng)盡量靠近挖掘鏟位置,有利于降低地面土壤的支持反力和滾動(dòng)摩擦力。根據(jù)式(10)~式(12),位調(diào)節(jié)挖掘部件水平方向阻力只有R1,沒有限深輪滾動(dòng)摩擦阻力,但收獲支架受到的垂向支持力U1的反作用力經(jīng)油缸傳遞給履帶行走底盤對(duì)地面的壓力,從而增加了行走底盤的行走阻力。
2 挖掘部件運(yùn)動(dòng)與力學(xué)特性仿真
2.1 EDEM土壤離散元模型建立
2.1.1 壟結(jié)構(gòu)及參數(shù)
胡蘿卜種植方式分為壟作和平作,且壟作除了通風(fēng)排澇之外,還更便于胡蘿卜機(jī)械化收獲。國(guó)內(nèi)北方地區(qū)常采用一壟兩行的種植模式,起壟的結(jié)構(gòu)尺寸如圖5所示。其中,壟間距為800mm,上壟面寬450mm,壟底寬600mm,壟高180mm。

圖5 胡蘿卜壟結(jié)構(gòu)尺寸Fig.5 Carrot ridge structure size
2.1.2 土壤物理與力學(xué)參數(shù)
為了建立土壤EDEM離散元模型,需通過試驗(yàn)獲取田間土壤物理特性參數(shù)。測(cè)量方式為間隔5m,選取10個(gè)測(cè)試點(diǎn),測(cè)量深度100~300mm。利用SL-TSC高智能緊實(shí)度儀進(jìn)行測(cè)量,結(jié)果如表1所示。
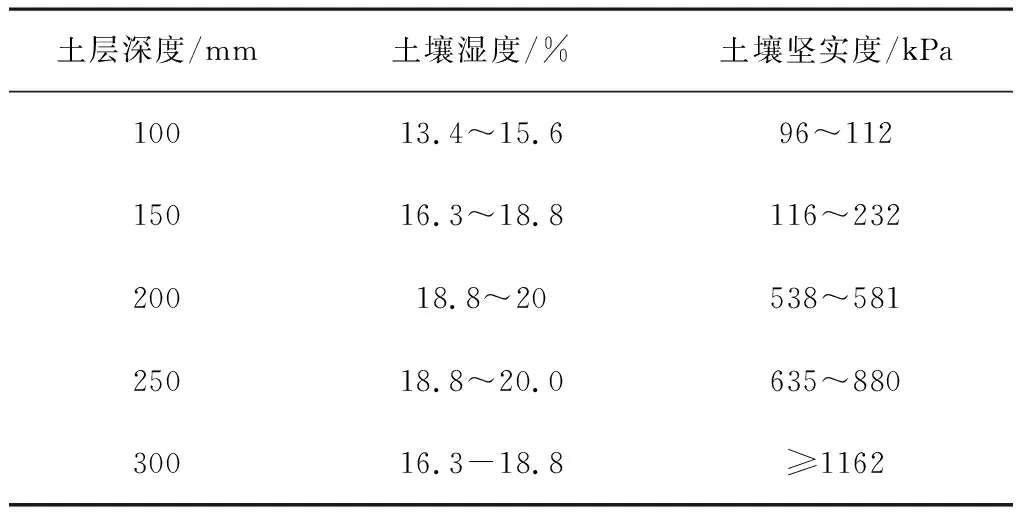
表1 田間土壤物理參數(shù)Table 1 Field soil physical parameters
2.1.3 土壤離散元模型建立
根據(jù)土壤物理特性參數(shù)測(cè)量結(jié)果,從EDEM軟件自帶材料庫(kù)中選取“Compressible Soft Sticky Material”土壤材質(zhì),結(jié)合壟結(jié)構(gòu)尺寸,創(chuàng)建仿真土壤顆粒床模型。整個(gè)顆粒床模型高500mm,壟面寬400mm,壟高140mm,如圖6所示。

圖6 顆粒床模型Fig.6 Granular bed model
將一壟兩行自走式胡蘿卜聯(lián)合收獲機(jī)簡(jiǎn)化模型保存成STL格式、導(dǎo)入到EDEM創(chuàng)建的土壤模型中。仿真接觸參數(shù)設(shè)置如表2所示。

表2 EDEM仿真參數(shù)Table 2 EDEM Simulation parameters
2.2 挖掘部件結(jié)構(gòu)模型建立與運(yùn)動(dòng)仿真分析
2.2.1 挖掘鏟結(jié)構(gòu)參數(shù)取值
挖掘部件結(jié)構(gòu)如圖7所示。其結(jié)構(gòu)采用兩翼型三角鏟,鏟刃斜角為γ=28°,鏟刃尖角θ=120°。

圖7 挖掘鏟結(jié)構(gòu)圖Fig.7 Structure drawing of scarifying shovel
挖掘?qū)挾却笥诤}卜的種植行距,則鏟面寬度滿足的條件為
B+2ε≥d+s+2σ+u
式中B-鏟面寬度(mm);
ε-鏟面外側(cè)單邊有效擾動(dòng)值(mm);
s-胡蘿卜的種植行距(mm);
d-胡蘿卜根塊平均直徑(mm);
σ-胡蘿卜種植行偏差(mm);
u-機(jī)器行走偏差(mm)。
其中,s=200mm,d=50mm,σ=10mm,ε=35mm,u=60mm。代入上式得B≥260mm,則取B=270mm。
2.2.2 仿真試驗(yàn)方案
EDEM挖掘松土仿真模型如圖8所示。為了研究入土角對(duì)挖掘阻力與壅土的影響,以挖掘鏟最終入土角度γ1作為試驗(yàn)因素,以挖掘部件工作阻力和土壤壅起高度作為試驗(yàn)指標(biāo),進(jìn)行仿真試驗(yàn)。設(shè)置挖掘深度H=265mm、前進(jìn)速度v=0.7m/s為固定值,挖掘鏟最終入土角γ1在13°~42°范圍內(nèi)取值,每次仿真試驗(yàn)行進(jìn)距離為10m,依次在挖掘鏟前進(jìn)3、6、9m位置處測(cè)量土壤壅起壟面的高度,并記錄工作阻力值。將挖掘角度增加1°,進(jìn)行下次仿真試驗(yàn)。

圖8 仿真模型Fig.8 Simulation model
為了研究位調(diào)節(jié)不同前進(jìn)速度和入土速度對(duì)入土行程與挖掘阻力的影響,以機(jī)器的前進(jìn)速度和挖掘部件繞主軸心旋轉(zhuǎn)速度作為試驗(yàn)因素,以入土行程和挖掘阻力為試驗(yàn)指標(biāo),進(jìn)行仿真分析。設(shè)置挖掘深度H=265mm、最終入土角γ1=14°為固定值,機(jī)器的前進(jìn)速度取值范圍v=0.2~1.0m/s,主軸轉(zhuǎn)速取值范圍n=0.4~0.7r/min,根據(jù)挖掘裝置結(jié)構(gòu)參數(shù)可計(jì)算入土?xí)r間為T=2.0~3.5s。仿真試驗(yàn)不考慮時(shí)間大于3.5s,入土行程不超過2m,故滿足仿真試驗(yàn)條件的速度與入土?xí)r間匹配值共15組,依次對(duì)入土行程創(chuàng)建仿真試驗(yàn)。
2.3 試驗(yàn)結(jié)果與分析
2.3.1 入土角對(duì)挖掘效果的影響
通過統(tǒng)計(jì)仿真試驗(yàn)數(shù)據(jù),獲得入土角分別與壅土高度和挖掘阻力的關(guān)系,如圖9所示。由圖9擬合曲線可知土壤壅起高度、挖掘阻力均與入土角度成正比,故在滿足挖掘鏟能夠入土至規(guī)定作業(yè)深度的條件下盡量減小入土角度。

圖9 入土角-壅土高度/挖掘阻力關(guān)系Fig.9 Relationship between penetration angle and backwater height/excavation resistance
2.3.2 挖掘鏟入土行程分析
通過統(tǒng)計(jì)仿真試驗(yàn)數(shù)據(jù),獲得不同前進(jìn)速度和入土速度對(duì)入土行程與挖掘阻力的影響關(guān)系,如表3所示。根據(jù)機(jī)器作業(yè)性能的不同,選擇較短的入土行程。當(dāng)挖掘鏟入土行程總時(shí)間為2.0s、機(jī)器前進(jìn)速度0.2m/s時(shí),挖掘鏟入土行程最短,僅為0.4m,此時(shí)挖掘鏟承受較大的挖掘阻力,最大值為11498.2N;選擇挖掘鏟受力較小的入土行程時(shí),挖掘鏟入土行程總時(shí)間為2.85s、機(jī)器前進(jìn)速度0.7m/s時(shí),挖掘鏟受力最小,僅為2075.04N,此時(shí)挖掘鏟入土行程為1.995m。

表3 入土速度-入土行程/挖掘阻力關(guān)系Table 3 Relation between penetration speed and penetration stroke/digging resistance
3 試驗(yàn)驗(yàn)證
3.1 試驗(yàn)設(shè)備、材料與方法
試驗(yàn)于2021年6月24日-6月29日在山東省萊西市胡蘿卜基地開展,試驗(yàn)設(shè)備為自行研制的4HZL-2胡蘿卜聯(lián)合收獲機(jī);胡蘿卜種植模式為一壟兩行,行距為20cm,株距為10cm;胡蘿卜品種為長(zhǎng)耕黑田五寸參;土壤類型為壤土,土壤含水率為13.4%~20%。
試驗(yàn)過程中,首先調(diào)整樣機(jī)挖掘鏟初始入土角,入土后每間隔3m停機(jī)記錄統(tǒng)計(jì)1次壤壅起高度,并測(cè)量入土角,如圖10所示。每次試驗(yàn)收獲長(zhǎng)度為10m,記錄胡蘿卜漏收個(gè)數(shù)和損傷個(gè)數(shù)及總個(gè)數(shù),計(jì)算漏收率和損傷率。

圖10 胡蘿卜挖掘收獲試驗(yàn)Fig.10 Test of carrot digging
3.2 試驗(yàn)結(jié)果
試驗(yàn)結(jié)果顯示:當(dāng)挖掘鏟的最終入土作業(yè)角度小于14°時(shí),因初始入土角過小,挖掘鏟無法進(jìn)入;最終入土角為14°~22°時(shí),胡蘿卜收凈率≥98%,破損率為≤1.5%,壅土現(xiàn)象不顯著(見表4),滿足收獲要求;隨著挖掘鏟入土角的增大,收獲環(huán)節(jié)出現(xiàn)壅土堵塞現(xiàn)象,漏收率和損傷率迅速增加,無法滿足收獲要求。

表4 田間試驗(yàn)結(jié)果Table 4 Field test results
4 結(jié)論
1)構(gòu)建了胡蘿卜聯(lián)合收獲機(jī)挖掘部件入土特性及與土壤互作力學(xué)特性的數(shù)學(xué)模型,理論分析表明:入土軌跡是一條斜率遞增的拋物曲線。同時(shí),解析了入土角、入土行程、挖掘阻力及挖掘部件結(jié)構(gòu)間的關(guān)聯(lián)關(guān)系。
2)EDEM離散元仿真試驗(yàn)顯示土壤壅起高度、挖掘阻力均與入土角度成正比,并獲得不同前進(jìn)速度和入土速度對(duì)入土行程與挖掘阻力的影響關(guān)系。田間樣機(jī)驗(yàn)證試驗(yàn)表明:最終入土角為14°~22°時(shí),胡蘿卜收凈率≥98%,破損率為≤1.5%,壅土現(xiàn)象不顯著,滿足收獲要求。
猜你喜歡
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01

- 農(nóng)機(jī)化研究的其它文章
- 拖拉機(jī)驅(qū)動(dòng)系統(tǒng)對(duì)其性能和油耗的影響及試驗(yàn)研究
- 基于PLC技術(shù)的聯(lián)合收割機(jī)電氣控制系統(tǒng)設(shè)計(jì)
- 基于無線網(wǎng)絡(luò)的農(nóng)產(chǎn)品冷鏈物流溫度監(jiān)測(cè)系統(tǒng)研究
- 小區(qū)播種機(jī)錐體投種器分種均勻性的試驗(yàn)研究
- 遠(yuǎn)射程噴霧機(jī)噴霧參數(shù)優(yōu)化與試驗(yàn)
- 果園風(fēng)送噴霧風(fēng)力調(diào)控試驗(yàn)臺(tái)設(shè)計(jì)及試驗(yàn)