智能清糞機器人系統的設計與試驗
2024-01-11 07:55:12高彥玉羅土玉周昆樂鐘日開
農機化研究 2024年2期
高彥玉,羅土玉,邊 峰,周昆樂,鐘日開
(1.廣東省現代農業裝備研究所,廣州 510630;2.廣東廣興牧業機械設備有限公司,廣州 510520)
0 引言
近3年來,我國畜禽養殖業規模化發展迅速,集中式、高密度養殖成為主流,在生豬養殖方面尤為明顯。為了改善養殖舍環境,舍內地板大多為漏糞板結構,但在實際應用中糞污不能完全通過漏糞板縫隙掉入集糞槽,堆積在漏糞板上的糞污不及時處理便會揮發氨氣、硫化氫等有害氣體,降低舍內空氣質量[1-3]。同時,由于畜禽糞具有一定的黏性,未掉落的糞污被畜禽蹄踩踏后易粘在蹄部而產生蹄病,且畜禽在欄舍內走動會增加細菌微生物繁衍和傳播的機會,降低了畜禽的健康水平和抗病能力。隨著養殖裝備的升級,畜禽舍內清糞或清洗裝備得到興起,清理方式從人工清理發展到機器人清理,技術逐漸趨于成熟。目前,國外所研發、設計并規模生產使用的智能化清糞裝備具有良好的清除糞污效果。其中,最為典型的是瑞典利拉伐公司的DeLaval robat scraper RS250、德國GEA集團的SRONE以及荷蘭的LELY公司的Lely Discovery。這3款機器人應用于養牛舍的清潔,均能夠自主掌握工作環境信息,實現自動尋跡與避障;結構上均采用兩電機驅動,形成差速,運動靈活;同時,可以使用傳感器感知外部環境,適應不同的環境[4-8]。與國外相比,我國養殖舍內的清潔機器人仍處于研究起步階段。堯李慧等[9]研發了一款牛舍清潔機器人,主要研究該機器人的路徑規劃與避障控制方法和技術。姚騰飛等[10]基于PLC開發漏縫地板式豬舍糞污智能清掃小車,在清除糞污的同時可自動檢測豬舍內有害氣體濃度。國內對養殖舍內糞污清理裝備的研發投入逐步增大,但現有的研究在實際豬場還未得到大面積推廣應用。為此,在總結前人研究的基礎上,根據機器人技術的發展,設計了一種智能清糞機器人,以期為畜禽養殖裝備提供應用參考。
清糞機器人工作環境惡劣,養殖舍內配有圍欄、飲水設備、飼喂器等,會加大清糞機器人的工作難度。因此,本研究在機械零部件上嚴格按照畜禽舍復雜環境選取,控制方面以SLAM(Simultaneous Localization and Mapping,即時定位與地圖構建)算法為基礎[11-14],利用小型工控機為上層控制器、STM32 ARM系列芯片為底層控制器,基于WR-SD 3000系列激光雷達[15-16],以開源的機器人操作系統ROS(Robot Operating System,ROS)為軟件開發平臺[17-19],以穩定性較好的QT Creater為程序編譯工具,設計并實現畜禽養殖舍內清糞機器人的建圖、導航、清糞、充電與加水等功能。
1 清糞機器人系統結構及工作過程
1.1 整體結構
清糞機器人主要由充電與加水裝置、電控系統、行走裝置、作業系統等組成,如圖1所示。其中,充電與加水裝置實現整機的電池充電和水箱加水,包括充電觸頭、充電樁、入水管、充電座、電池、水位探頭、水箱等;電控系統包括控制元件和傳感器;行走裝置包括前端萬向輪和后端兩個驅動輪,形成三點支撐行走架構,保持機體的平衡;作業系統包括前后水噴頭和刮糞板。

1.激光雷達傳感器 2.充電觸頭 3.充電樁 4.入水管 5.充電座 6.電池 7.水噴頭 8.驅動輪 9.排水管 10.刮糞板 11.萬向輪 12.超聲波傳感器1 13.水箱 14.溢流管 15.超聲波傳感器2 16.工控機圖1 清糞機器人整體結構圖Fig.1 The overall structure of the excrement cleaning robot
在整體結構設計中,將激光雷達傳感器設于最頂端,其高度與養殖舍內圍欄高度一致,以便于掃描養殖舍環境信息以及整機避障;在機身前端和中上端各設1個超聲波傳感器,用于探測所建地圖之外的障礙物;充電樁內裝有紅外傳感器,實現整機返回充電和加水(后簡稱回充)時自動找準回位;水噴頭前后各1個,設置于清糞機器人前端的水噴頭用于對漏糞地板上較硬的糞污濕潤,便于刮糞板刮掉落進集糞槽,設置于后端的水噴頭用于清洗刮后的地板。
1.2 清糞機器人運動學分析
清糞機器人能在養殖舍內自主行駛、完成清糞工作,其核心為路徑規劃方法。因此,以自主避障與全區域覆蓋路徑規劃為出發點進行深入研究,達到實時清糞的目的。
清糞機器人在作業時,畜禽舍內的圍欄、飼喂器、墻面等會阻礙其正常作業。因此,在清糞機器人作業前先采集畜禽舍環境信息,生成地圖,并在地圖內將固定的設施設備(如圍欄、飼喂器、墻面)添加完畢,有效避免清糞機器人與此類障礙物發生碰撞。清糞機器人由位于底盤左右兩側的動力輪驅動行駛,底盤前端配置1個萬向輪用于輔助支撐、平衡車體,兩個動力輪獨立控制速度,并通過設置不同速度實現底盤轉向控制。清糞機器人運動學模型如圖2所示。其中,x、y為建立的x軸和y軸坐標系,x’、y’為相對坐標系。
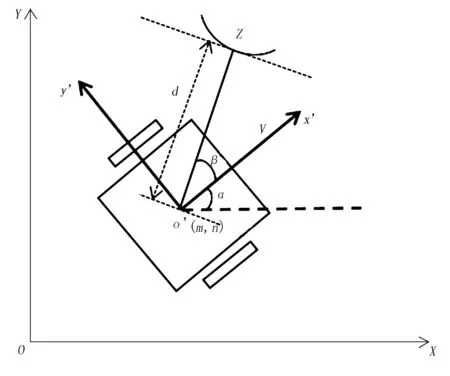
注:d為清糞機器人行駛中與障礙物的距離;Z為障礙物位置;α為清糞機器人的方向角;β為清糞機器人與障礙物移動坐標系夾角;o’ 為清糞機器人移動中心處的位置。圖2 清糞機器人運動學模型Fig.2 The kinematic model of excrement cleaning robot
由圖2可得全區域及清糞機器人移動坐標系之間的關系,公式為
x=m+x′cosα+y′sinα
(1)
y=n+y′cosα-x′sinα
(2)
(3)
(4)
式中α-清糞機器人的方向角(°);
β-清糞機器人與障礙物移動坐標系夾角(°);
d-清糞機器人行駛中與障礙物的距離(m);
m-清糞機器人移動中心處距離起始點的橫向距離(m);
n-清糞機器人移動中心處距離起始點的縱向距離(m)。
根據式(3)、式(4)計算得到障礙物邊界Z的具體位置,包括在清糞機器人移動坐標系中的具體位置以及在全區域路徑坐標系中的位置。
1.3 工作過程
為了較好地展示該清糞機器人的作業過程,設計了工作流程圖,如圖3所示。具體流程如下:在清糞機器人開始作業前,養殖人員根據養殖舍內是否有畜禽和地面糞污量情況進行參數設置;然后,啟動整機上電,在工控機與筆記本的通信互聯成功后,將遙控器切換到手動遙控模式,人工控制清糞機器人行走;通過搭載的激光雷達傳感器掃描養殖舍內環境點云數據,在養殖舍內行駛1個閉環后生成完整地圖并保存;此時,啟動導航,將清糞機器人顯示在人機交互界面的方向,調整至與實際方向位置一致后,在所建地圖上設置目標巡航點以及回充點,再開始工作;行駛完1個行程后,可結束工作并開啟回充,清糞機器人進入回充模式,等待下一輪清糞。
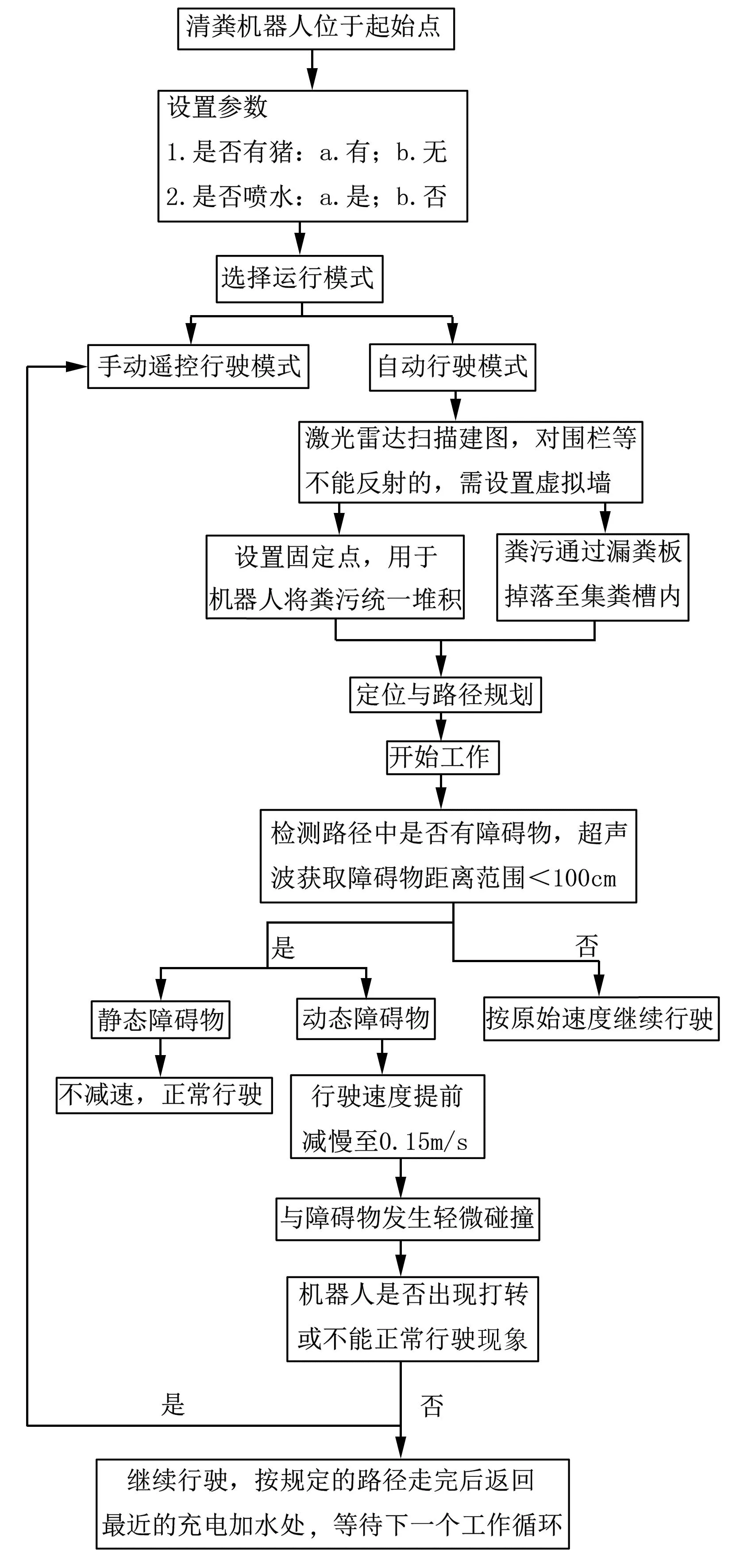
圖3 清糞機器人工作流程圖Fig.3 Flow chart of the excrement cleaning robot
需要特別說明的是:①當作業中電量或水量低于設定的最小值時,會發出報警信息,此時在界面端點擊回充模式,清糞機器人則自動返回到充電處進行充電、加水。②在開始工作前,如需將養殖舍內糞污統一推至固定點處堆積,則在所建地圖上設置固定點;如糞污直接通過漏糞板推掉落進集糞槽內,則不用設固定點。③作業中,養殖舍內墻體及養殖設備等為靜態障礙物,活體畜禽、養殖人員為動態障礙物。由于在生成地圖時靜態障礙物已掃描,當檢測到此類障礙物時行駛速度不變且不發生碰撞;對于動態障礙物中的活體畜禽,由于畜禽經常在養殖舍內行走,當清糞機器人與畜禽發生碰撞時畜禽會自動避開。畜禽的身高低于激光雷達傳感器所置高度時,超聲波傳感器可對其進行距離檢測,檢測到畜禽時清糞機器人的行駛速度減慢且會直接碰撞,但碰撞程度不會對其造成任何傷害。而對于養殖人員,這種高于激光雷達傳感器的障礙物,激光雷達可讀取,此時清糞機器人會繞開養殖人員繼續行走。對于舍內沒有障礙物的區域,可根據糞污量設置行駛速度,以提高作業效率。
2 清糞機器人控制系統設計
2.1 硬件系統
清糞機器人硬件系統是保障其清糞效率的重要前提,決定了清糞機器人的工作性能。硬件系統由控制器、傳感器模塊、信號處理模塊、儲水處理模塊、充電模塊、IMU(Inertial Measurement Unit,慣性測量單元)模塊、編碼器以及驅動模塊組成,如圖4所示。

圖4 清糞機器人硬件系統框圖Fig.4 Block diagram of the excrement cleaning robot hardware system
控制器包含上層控制器和底層控制器。上層控制器選用具有功耗低、耐腐防潮、耐高低溫、能在惡劣環境中穩定運行且滿足SLAM算法實時運算要求的雙核四線程的工控機;底層控制器為STM32 ARM系列主控芯片,用于獲取超聲波傳感器、編碼器、IMU模塊和水位探頭等的信號,來控制清糞機器人實現相關動作。傳感器模塊包含激光雷達和超聲波傳感器。激光雷達傳感器可實現270°范圍、最大測量范圍100m的二維區域檢測和輪廓掃描,具有高精度、高分辨率、高速測量等特點,用于掃描養殖舍環境信息,結合Karto_slam算法構建環境地圖;超聲波傳感器選用封閉式一體防水探頭,工作溫度在-15~+60℃之間,可適用于潮濕、惡劣的場合,用于探測和傳輸障礙物的距離信息到底層控制器;信號處理模塊為遙控器,遙控器選用MC6C航模型,可實現遠距離控制,操作簡便;儲水處理模塊包含加水模塊和噴水模塊。
2.2 軟件系統
清糞機器人軟件部分是在ubuntu16.04操作系統下,結合ROS 系統,在QT 5.9下使用C++和Python混合編程。在ROS機器人操作系統中集成了Rviz數據可視化平臺,實時、直觀地顯示構建的養殖舍環境地圖,監測清糞機器人在養殖舍內作業的動態,方便操作人員進行系統參數設置與修改。
建圖采用激光雷達傳感器(WR-SD3000),通過上層控制啟動底盤節點和建圖SLAM節點,通過以太網通信將獲取的點云數據傳送至上層控制器,由工控機處理數據并利用Karto_slam算法構建地圖。
導航框架與上層控制器之間通信采用ROS的多機通信功能,上層控制器開啟底盤節點和movebase節點,使用AMCL定位算法和robot_pose_ekf擴展卡阿爾曼濾波算法對IMU和ODOM里程計進行融合實現導航。
路徑規劃采用Navigation功能包實現,利用zkwl_robot_start 通過可視化工具Rviz與清糞機器人進行交互,ros_robot_control 根據發出的指令啟動相應的control,經過A*和D*算法運算后,將結果發送至底層控制器,最終實現對清糞機器人的運動及充電與加水控制。
3 試驗分析
3.1 試驗場地
為了驗證所設計的清糞機器人的性能,以豬為測試對象。試驗在廣州市增城區某豬場,以人工清洗為對照組、清糞機器人清洗為測試組,選取兩棟養豬量相同的豬舍。每棟舍內有16欄,每欄尺寸為4m×5m,放置自動飼喂器1臺,養殖20頭豬只。在豬只同一天出欄后(因非瘟防控要求,只能在無豬的情況下測試),人工清洗A棟舍,清糞機器人清洗B棟舍。
3.2 測試前的準備
1)通信互聯。清糞機器人運行時,算法運算需要采集大量實時的傳感器數據,受網絡延遲影響,在清糞機器人上搭載工控機,實時生成的地圖數據可通過無線網絡將工控機與遠程筆記本進行連接。試驗中,將流量卡直插于無線路由器端,將工控機與遠程筆記本的IP地址進行固定,可有效避免每次需要使用時因IP不一致而無法實現通信互聯。在Rviz界面,將固定好的IP輸入并點擊連接按鈕,界面中機器人狀態顯示在線則表明工控機與遠程筆記本之間的通信連接成功。連接成功后的界面如圖5所示。

圖5 工控機與遠程筆記本實現通信互聯的界面Fig.5 Interface of communication between IPC and remote notebook
2)環境建圖。在電腦端Rviz界面啟動底盤并點擊啟動建圖按鈕,人工遙控清糞機器人在圍欄內行走1圈,界面內會生成完整地圖,此時點擊保存地圖并關閉建圖。根據路徑規劃算法、清糞機器人行駛路線設計應用、豬場實際情況,設計如圖6所示的路徑圖。

圖6 清糞機器人運動軌跡設計圖Fig.6 The design diagram movement track of the excrement cleaning robot
3)設置巡航點。根據運動軌跡設計圖和掃描地圖,在電腦端Rviz界面設置清糞機器人行駛速度0.23m/s和巡航點,設置完畢后等待開啟巡航。
4)回充測試。清糞機器人的電量和水量會實時在Rviz界面顯示。為了便于在作業中出現電量或水量低于設定的最小值,清糞機器人能返回到充電與加水處,當地圖建立完成后,可先在界面內設置回充點。清糞機器人因選用額定容量為80Ah的電池,續航時間長,所以在本次測試前提前將電池進行了放電處理(剩余電量略高于最小值)。作業中,當清糞機器人電量或水量低于設定最小值時,能自動找準回充點進行充電和加水。
3.3 清糞作業
當清洗人員及清糞機器人兩者的清洗前工作準備完畢后,同時開始作業,并記錄開始時間。因未找到豬舍地面清潔的相關標準,以人工清洗的清潔度為參考,達到日常飼養人員清洗的清潔度即可。本次測試相關指標對比情況如表1所示。表1中,人工清洗模式下,參與人員數按照該豬場日常清洗要求配備;清糞機器人清洗模式下的參與人員為1人,主要用于清糞機器人開始工作前的準備,如掃描建圖、電腦參數設置等。在固定豬場清洗時,只需第1次完成準備前工作,后期可自動作業,無需人工參與。

表1試驗對比情況Table 1 Experimental comparison
3.4 試驗結果
通過在豬場的測試,清糞機器人的建圖、導航、充電與加水功能均可順利實現。根據表1的數據,清糞機器人與人工清理相比,在同等養殖量和清潔度情況下可節省2名人工;同時,工作時長可減少80%,有效降低了作業強度;人工清理模式因操作者疲勞而不能長時間工作,而清糞機器人在電量充足的情況下可持續工作8h,其每次充電達到100%需持續充8h。
4 結論
1)基于養殖舍內糞污及漏糞板情況開發的清糞機器人系統,集成了傳感器掃描建圖與避障、直流無刷電機、橡膠刮糞板于一體,融入ARM系列嵌入式開發,降低了人工清糞強度及成本。
2)清糞機器人控制系統為上層控制器與底層控制器相結合,核心硬件系統采用高性能器件,軟件平臺擁有大量的功能包,支持多種編程語言,程序編譯環境穩定,代碼復用率高,提高了開發效率。
3)通過在豬場環境內測試,系統可實現建圖、導航、清糞和回充功能,符合預設基本要求。
