拖拉機三點懸掛電液加載系統研究與試驗
2024-01-11 07:55:46宗建華呂東曉王書茂
農機化研究 2024年2期
關鍵詞:系統
宗建華,王 玲,呂東曉,張 旗,王書茂
(中國農業大學 工學院,北京 100083)
0 引言
拖拉機作為農業裝備的核心,其技術發展水平體現著國家農業機械化程度和農業現代化發展水平[1]。為實現拖拉機零部件與系統可靠性驗證,需要研制相對應的加載試驗臺,如動力輸出軸加載試驗臺、發動機臺架、轉鼓試驗臺以及液壓加載試驗臺[2]。三點懸掛系統是拖拉機關鍵系統之一。由于田間作業工況的復雜多變,拖拉機三點懸掛液壓系統承受較大的隨機載荷,容易發生零部件疲勞破壞與液壓故障,直接影響拖拉機安全及作業效率。
目前,三點懸掛液壓加載臺較多,但由于加載設備動態響應性能有限,機械零部件疲勞壽命試驗方法通常采用靜態載荷加載或靜態逐級加載的方式,無法真實還原田間作業載荷特征,影響機械零部件產品設計、疲勞壽命預測以及可靠性驗證等[3-5]。隨著設備響應性能以及控制方法的優化,利用動態試驗設備將動態田間載荷應用于整機或關鍵零部件的臺架可靠性試驗,能夠取得與實際工況較為一致的可靠性測試結果[6]。譚彧[7-8]開發的懸掛液壓力加載試驗臺,對懸掛土壤阻力進行數學建模,通過傳統理論方法實現液壓系統建模,采用模糊控制的方法實現力、位、力位階躍加載。徐強[9]研制了液壓懸掛試驗臺,通過傳統理論方式建立液壓系統數學模型,然后進行了懸掛靜態加載試驗。李文明[10]研制了懸掛阻力加載系統,對犁耕阻力進行分析,通過AMESim和MatLab/Simulink聯合仿真對液壓系統建模,通過單片機實現恒阻力、階躍和斜坡加載。朱晨陽[11]通過液壓加載系統實現了三點懸掛提升力的加載與最大提升力驗證。商高高[12]提出了一種應用電液比例閥控制牽引力和垂直度的試驗臺結構方案,基于SimulationX 軟件對試驗臺的液壓加載系統進行仿真分析,通過PID對系統進行階躍、正弦跟隨以及垂直度仿真。
上述文獻中基本都是靜態或逐級加載,沒有實現基于田間動態載荷加載的問題。因此,筆者研制了拖拉機三點懸掛電液加載系統,基于NI Compact-RIO開發了拖拉機加載平臺測控儀與上位機測控軟件,并對電液系統進行建模與控制方法研究,以實現基于田間動態載荷譜的三點懸掛加載,為拖拉機三點懸掛零部件與系統可靠性驗證提供平臺和方法支撐。
1 三點懸掛電液測控系統開發
1.1 電液系統組成
電液系統組成與工作原理如圖1所示。拖拉機三點懸掛加載系統由加載油缸、懸掛提升框架、牽引力傳感器、拉繩傳感器、角度傳感器、電液比例溢流閥、比例換向閥及液壓泵站等組成,設備參數如表1所示。拖拉機三點懸掛提升框架通過牽引力傳感器與加載油缸相連,角度傳感器安裝在加載油缸支架底部;加載油缸對提升框架施加阻力,用于模擬拖拉機田間作業承受的懸掛載荷,并通過牽引力傳感器與角度傳感器檢測模擬載荷大小及加載角度。牽引力、加載方向及伸縮速度通過液壓泵站、電液比例溢流閥及電液比例換向閥進行控制。

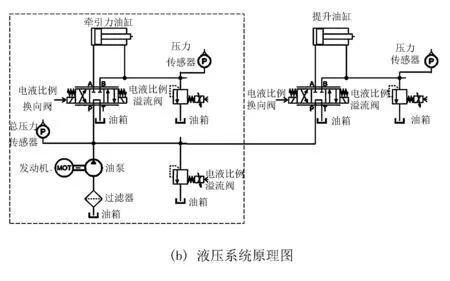
圖1 拖拉機三點懸掛電液加載系統組成與工作原理Fig.1 Composition and working principle of lectro-hydraulic servo loading system for tractor three-point suspension
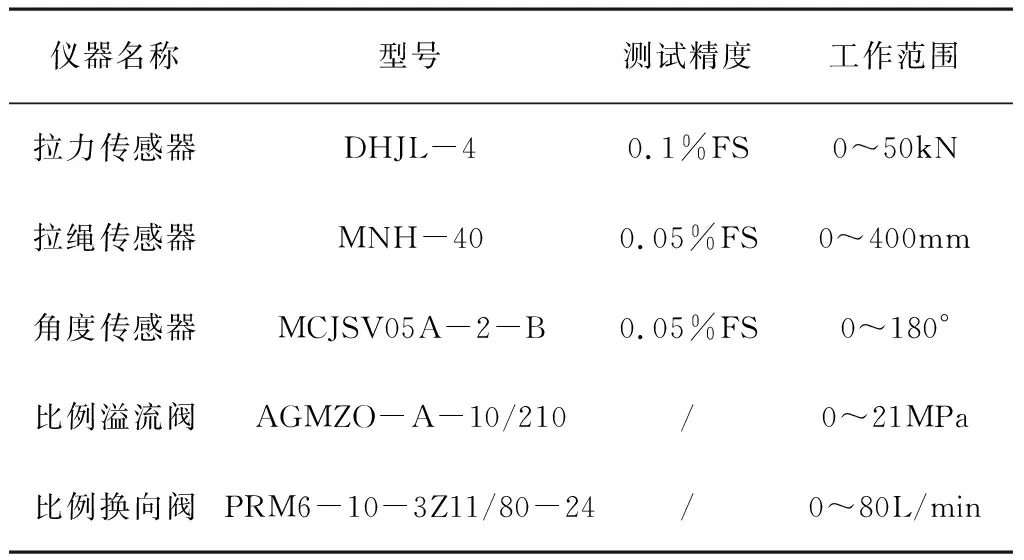
表1 設備參數Table 1 Device parameters
總液壓系統主要分為液壓提升加載和液壓牽引力加載兩部分。首先是啟動三相電機油泵開始工作,在沒有開啟換向閥時液壓油經過溢流閥回至油箱,控制換向閥方向、閥口開度以及溢流閥閥口開度控制液壓油缸的加載。兩者液壓加載系統不是同時運行,本文只針對牽引力加載油缸進行控制,提升液壓部分不進行操作默認關閉狀態,所以在進行系統建模與控制方法研究時只需要考慮圖1(b)中虛線方框所畫部分。
1.2 電液測控系統
采用模塊化思想對整個測控系統進行設計,電液測控系統總體方案如圖2所示。系統主要包括拖拉機加載平臺測控儀、上位機軟件平臺、相應傳感器以及程控硬件。拖拉機加載平臺通過無線網橋與上位機軟件平臺連接,上位機軟件通過模擬量采集與控制實現三點懸掛力的加載,實現對拖拉機液壓系統進行可靠性試驗。

圖2 電液測控系統總體方案Fig.2 Overall scheme of electro-hydraulic servo measurement and control system
基于CRIO(NI Compact-RIO)開發拖拉機加載平臺測控儀,測控儀實物、CRIO控制器與內部電路板如圖3所示。其中,CRIO作為采集控制器,信號通過航插與供電調理轉接板相接,信號經過調理轉接板調理之后與CRIO相連,最后通過無線網橋與上位機進行通訊。

圖3 拖拉機加載平臺測控儀實物Fig.3 Tractor loading platform measurement and control instrument
基于LabVIEW開發上位機軟件平臺,主要包括主界面和標定調試界面,如圖4所示。標定調試界面進行傳感器參數標定以及系統運行調試,主界面主要分為系統辨識與三點懸掛力加載兩大部分。系統辨識部分可根據幅值最大值、最小值以及樣本個數生成八級階躍或正弦電壓信號,通過電壓信號加載得到對應牽引力數據,再進行系統辨識得到系統模型;三點懸掛牽引力加載部分,是將田間作業載荷譜進行真實還原加載,通過控制方法實現載荷譜的跟隨,從而進行拖拉機三點懸掛可靠性驗證試驗。

圖4 上位機軟件界面Fig.4 PC software interface
2 電液系統建模方案與驗證
2.1 電液系統建模方案
采用溢流閥控牽引力加載方案,對溢流閥控牽引力進行系統建模。液壓系統加載原理如圖5所示。液壓加載系統在進行牽引力加載時,通過目標牽引力與反饋牽引力進行比較,將壓差給控制器,控制器根據整個系統模型,輸出控制電壓與電流,從而實現對加載油缸的控制。液壓系統建模過程需根據加載原理,即根據控制輸入與輸出量進行系統模型建立。

圖5 拖拉機三點懸掛牽引力加載控制原理Fig.5 Tractor three-point hitch traction load control principle
2.2 系統辨識方案與試驗
為了解系統本身加載特性,首先通過系統辨識[13]的方式確定輸出電壓與牽引力的關系,確定牽引力的范圍以及可達加載的力的電壓范圍,通過施加范圍內的電壓獲取對應牽引力曲線,通過確定系統辨識方案進行試驗,確定系統的本身特性。
系統辨識的關鍵就是需要獲取大量準確的控制信號與輸出信號的數據,系統辨識數據方案對于系統建立準確模型至關重要。為保證系統辨識數據的準確性,根據香儂定理,信號采樣頻率需大于系統的響應時間、辨識算法以及控制算法的步長。由經驗公式可以估算具體的采樣頻率,即
(1)
式中f-采樣頻率(Hz);
T-采樣時間間隔(s);
T95-系統達到穩態值95%時所需要的時間(s)。
由于電液系統本身響應頻率最大約為30Hz,設置采樣頻率為100 Hz。采用八級階躍曲線與正弦曲線組合加載的方式,得到電液比例換向閥輸入電壓與液壓缸牽引力數據,如圖6所示。將兩種加載曲線各分成一半并進行組合作為系統辨識數據,另一半作為模型準確性驗證數據。


圖6 系統辨識獲取數據曲線Fig.6 System identification to obtain data curve
由辨識數據可以看出:電液比例溢流閥電壓與牽引力的大小大致成線性關系,但會存在0.45kN死區;但由于實際牽引力大小一般大于0.45kN,死區對于牽引力范圍并不造成影響。
2.3 基于ARMAX模型的系統辨識與驗證
對八級階躍辨識數據取一個階躍信號進行放大查看(見圖7),液壓系統會存在0.45kN的死區。這是由于電液比例換向閥的方向和開口大小確定,部分液壓油經過換向閥進入油缸,液壓系統存在初始流量和壓力導致的。
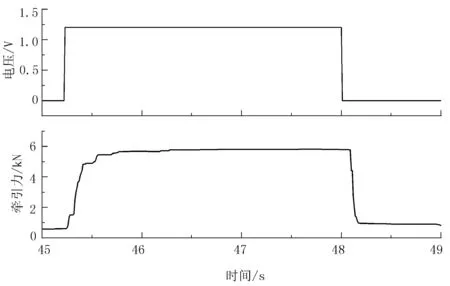
圖7 階躍信號放大圖Fig.7 Amplified view of step signal
通過MatLab系統辨識箱,將正弦與八級階躍組合電壓與牽引力進行傳遞函數系統辨識。為驗證傳遞函數模型的準確性,將另一部分組合數據電壓輸入模型,預測值與實際值進行比較,得到預測值、實際值與誤差的曲線,如圖8所示。
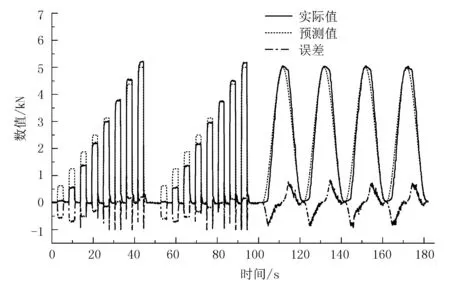
圖8 MatLab系統辨識箱擬合Fig.8 MatLab system identification box transfer function fitting curve
由誤差曲線可以看出:預測值與實際值在某些位置仍存在較大誤差。
由于通過MatLab傳遞函數辨識箱得到的傳遞函數還具有較大誤差,對系統分析以及后期校正影響較大,所以采用ARMAX模型[14]進行系統辨識,得到辨識驗證曲線,如圖9所示。由圖9可以看出:ARMAX模型辨識精度進一步提高,改進前誤差在-1~1之間,改進后預測值與實際值的誤差在-0.3~0.3之間,平均絕對誤差降低33.90%,均方誤差降低87.36%,均方根誤差降低64.45%。驗證結果表明(見表2):基于ARMAX模型的系統辨識具有更好的辨識效果,可為系統分析與系統校正提供更準確的傳遞函數模型。

圖9 ARMAX系統辨識擬合Fig.9 Terminal monitoring system software platform

表2 改進前后辨識效果分析Table 2 Analysis of identification effect before and after improvement
經過改進后系統辨識,該系統為一階延時系統,得到最后溢流閥電壓與牽引力的傳遞函數為
(2)
2.4 系統時間響應與頻率特性分析
運用MatLab/Simulink建立系統傳遞函數模型,通過輸入溢流閥控制電壓,經程序仿真得到系統的階躍響應與伯德圖,如圖10所示。由圖10可以看出:系統無超調量,當實際輸出從理想值的10 %上升至90 %時,其上升時間為0.25s;當輸出達到理想值得98%時,其過渡時間為0.35s。
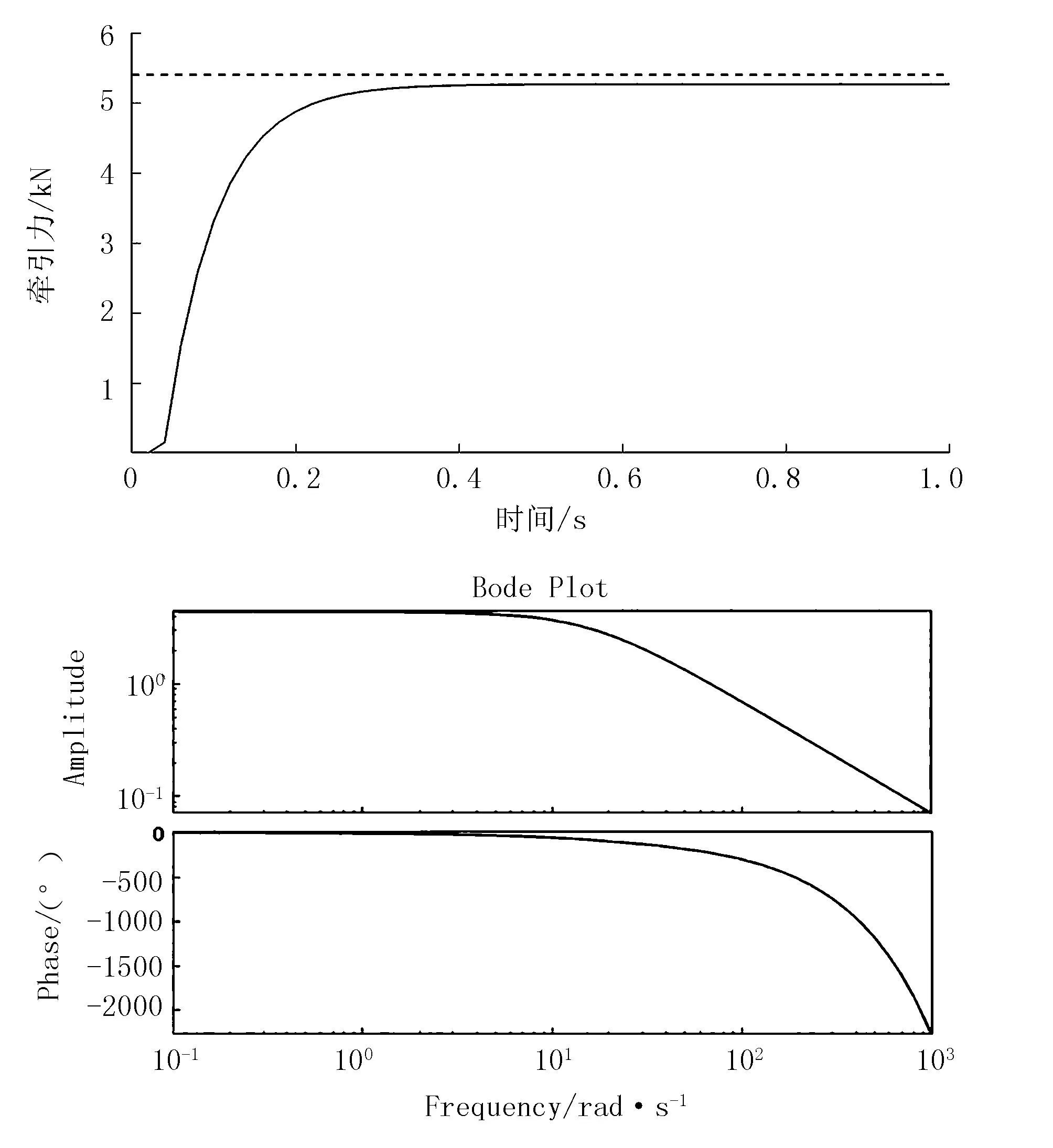
圖10 階躍響應與伯德圖Fig.10 Step response and Bode plot
3 基于PID的控制方法研究與臺架試驗
3.1 基于PID的控制方法研究與仿真
由以上分析可知,系統還存在穩態誤差、響應速度慢等問題。為提高系統的綜合性能,采用PID算法進行系統校正,通過MatLab/PID模塊進行基于傳遞函數的自動整定[15],得到PID的3個參數:P=0.35,I=0.029,D= 0.002。得到經過PID系統校正后的階躍響應伯德圖如圖11所示。

圖11 PID校正后階躍響應與伯德圖Fig.11 Step response and Bode plot after PID correction
PID校正后響應速度加快,曲線斜率變大,上升時間減小至0.1s,過渡時間減小至0.3s,超調量為4.63%,動態響應提高。
為更好對比矯正前后曲線實際跟隨效果,通過MatLab輸入采樣數為100的一周期正弦信號。設置采樣加載頻率為30Hz,輸入0~5.4kN的正弦牽引力信號,仿真時間為15s,得到校正前后跟隨曲線,如圖12所示。經過對比分析可知:校正后系統響應速度更快,雖然還存在一定的延時,但基本沒有誤差。這說明,基于PID的控制算法完全可以滿足試驗臺的加載精度要求。

圖12 正弦曲線跟隨響應Fig.12 Sinusoidal Follow Response
3.2 試驗與分析
為驗證臺架實際加載效果,分別將階躍曲線、正弦曲線以及田間采集載荷以20Hz加載頻率應用于臺架加載試驗。試驗現場與加載反饋效果如圖13所示。

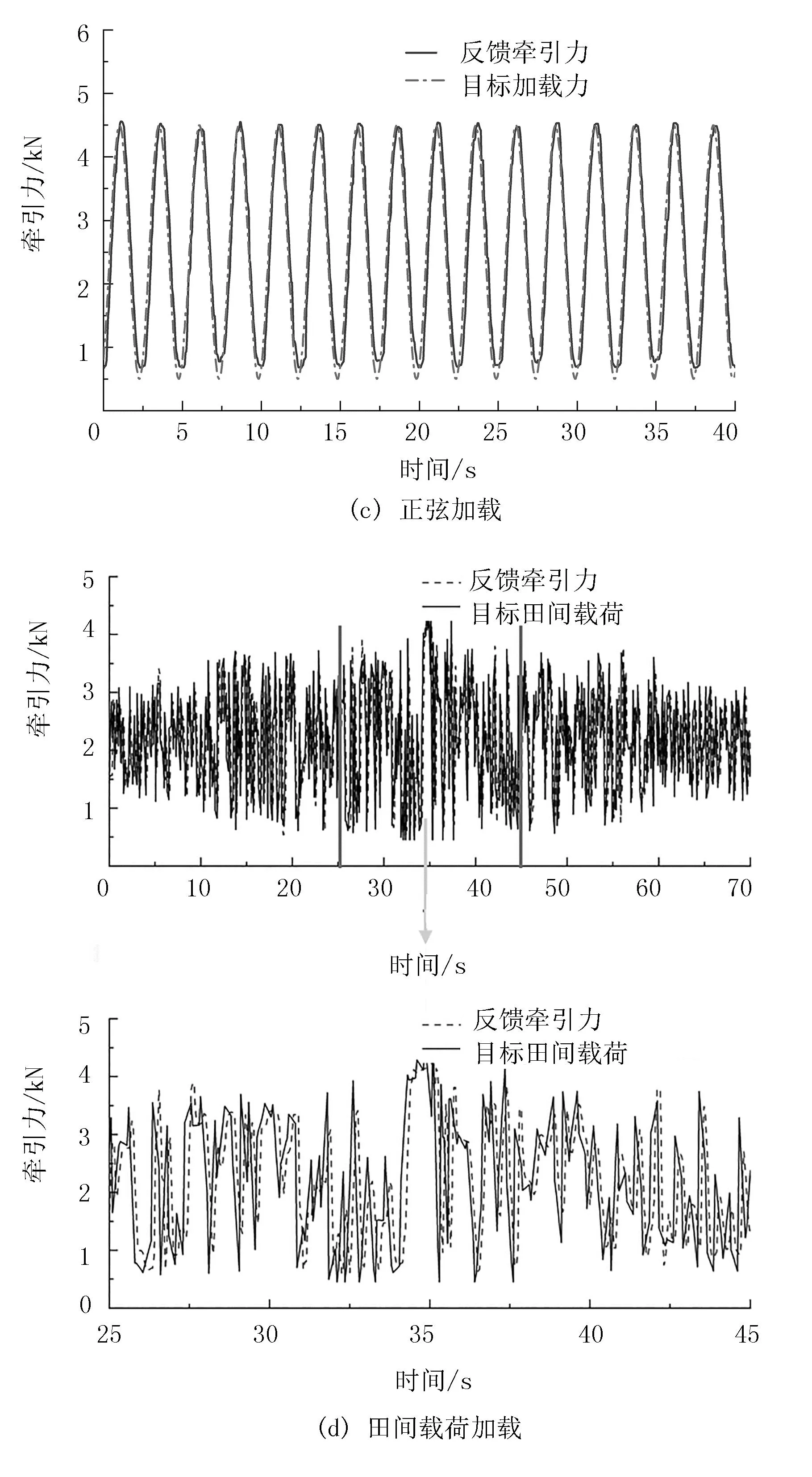
圖13 傳遞函數頻域響應Fig.13 Terminal monitoring system software platform
通過對目標牽引力與反饋牽引力進行分析表明:兩者最大均方差為0.28kN,系統最大超調量為5.19%,最大穩定時間為0.2s,最大延時為0.4s,系統實際加載動態響應效果較好。從階躍、正弦以及田間載荷跟隨放大曲線可以看出:牽引力基本可以實時跟隨目標輸入,室內臺架系統能夠滿足拖拉機三點懸掛牽引力的動態加載和田間作業載荷復現要求。
4 結論
1)針對拖拉機三點懸掛在田間作業承受較大隨機載荷。容易發生零部件損壞、液壓故障等問題,研制了拖拉機三點懸掛電液加載系統,并基于NI Compact-RIO開發了拖拉機加載平臺測控儀與上位機測控軟件,實現了信號采集與加載控制。
2)利用ARMAX模型對電液比例溢流閥控制力系統進行系統辨識,并與MatLab傳遞函數辨識箱比較,平均絕對誤差降低33.90%,均方誤差降低87.36 %,均方根誤差降低64.45%;基于PID進行系統自動校正,得到3個參數:P=0.35,I=0.029,D=0.002。進行時頻域分析以及正弦跟仿真,PID校正后的動態響應加快,整體誤差減小,具有更好的跟隨復現效果。
3)基于PID控制方法,上位機以20 Hz加載頻率將階梯信號、正弦信號、田間三點懸掛牽引力載荷應用于加載系統進行復現,兩者最大均方差為0.28 kN,系統最大超調量為5.19 %,最大穩定時間為0.2 s,最大延時為0.4 s,動態響應效果較好,能夠實現動態加載和田間作業載荷復現。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
