時域分析下的電力工程現(xiàn)場信息化視頻監(jiān)控方法
2024-01-12 05:39:08侯鐵鑄沈海濤肖琪峰高洪濤舒大平
微型電腦應用 2023年12期
關鍵詞:背景
侯鐵鑄, 沈海濤, 肖琪峰, 高洪濤, 舒大平
(廣東創(chuàng)成建設監(jiān)理咨詢有限公司, 廣東, 廣州 520000)
0 引言
電力線路的施工通常會由于環(huán)境惡劣、位置偏遠造成監(jiān)管不到位,出現(xiàn)各類安全事故隱患[1]。施工現(xiàn)場的復雜性、溝通效率的低下使得對于施工中出現(xiàn)的問題不能及時解決,也是近來施工建設中經(jīng)常存在的問題。通過人員監(jiān)理,加大監(jiān)管力度,對于作業(yè)面比較大的現(xiàn)場,同樣也很難實現(xiàn)實時管理,在某些方面也會出現(xiàn)人員和資源的浪費,造成管理成本上升。
現(xiàn)場監(jiān)控是一個比較好的處理方案,能夠有效地降低施工作業(yè)中的安全隱患,保證工作人員的人身和財產(chǎn)安全,提高施工現(xiàn)場的安全性和作業(yè)可靠性[2]。但是施工現(xiàn)場通常位于偏遠的地區(qū),網(wǎng)絡覆蓋性不足和現(xiàn)場電磁干擾嚴重,使得傳輸?shù)囊曨l信號存在大量的噪聲干擾,監(jiān)控視頻的質(zhì)量難以得到有效的保證[4]。大氣環(huán)境的變化、外界電磁場的干擾使得信號的采集過程、存儲過程受到了嚴重的影響,視頻效果難以得到有效的保證,進而會影響監(jiān)控管理人員對于施工現(xiàn)場情況的有效判斷,降低了處理問題的實時性效果,容易出現(xiàn)安全隱患,需要通過一定的方法來保證視頻的質(zhì)量和效果[5]。
本文研究利用時域分析的方法對電力工程的施工現(xiàn)場視頻進行處理,利用信息化的手段提高視頻的質(zhì)量,保證現(xiàn)場監(jiān)管的效果。時域分析法在降低視頻的噪聲的同時,可以對于施工人員的行為加以跟蹤和辨識,提高了施工現(xiàn)場的安全性。
1 運動目標檢測
1.1 目標檢測技術
對于施工現(xiàn)場的復雜圖像,由于場景因素較多,對于目標的檢測,需要通過將監(jiān)控視頻中的感興趣區(qū)域圖像加以分割,形成前景圖像和后景圖像[6],從而利用圖像處理技術,對現(xiàn)場的目標進行跟蹤、分類、行為分析等處理。根據(jù)攝像頭的位置情況,目標檢測技術可以分為動態(tài)背景檢測和靜態(tài)背景檢測兩種情況。
動態(tài)背景目標檢測主要針對移動平臺上的攝像頭或者工人安全帽上的攝像頭等移動攝像裝置。移動背景的目標和背景情況均存在較大變化,攝像的角度也并不一致,此類問題一般采用背景匹配的方法加以處理[7]。
背景匹配法的思路為對圖像中的背景做減法處理,從而可以有效提取出運動目標并加以檢測。雷景生等[8]利用融合度量學習和卡爾曼濾波的方法實現(xiàn)了運動目標的跟蹤,對運動目標的軌跡加以預測,該方法有效提高了目標跟蹤的效果,適用于變電站場景。
靜態(tài)背景法主要是基于固定攝像頭等情況下視頻圖像中的背景處于不變的狀態(tài),靜態(tài)背景可以采用幀間差分的方法和背景減除的方法。
1.2 幀間差分法
幀間差分法利用圖像時間序列中相鄰圖像對比,提取圖像中相對位置像素處的亮度值,經(jīng)過差分處理后,獲得圖像前景,根據(jù)目標運動前后的圖像變化情況,提取目標特征。杜文漢等[9]研究了一種基于變異特征提取的運動目標檢測方法,有效解決了視頻中檢測目標邊緣缺失的問題,提高了算法的檢測準確率和實時性。
相鄰兩幀之間的圖像差分處理的公式為
Ct=|It(x,y)-It-1(x,y)|
(1)

(2)
式中,It(x,y)為t時刻的視頻圖像,Ct為對應時刻的差分結果,通過閾值F的設定,可以獲得該圖像的二值化處理結果Rt。
1.3 背景減除法
背景減除法的思想同樣是對目標背景減除,通過差值情況和閾值大小的對比獲得目標的運動前景。背景減除法的流程圖如圖1所示。
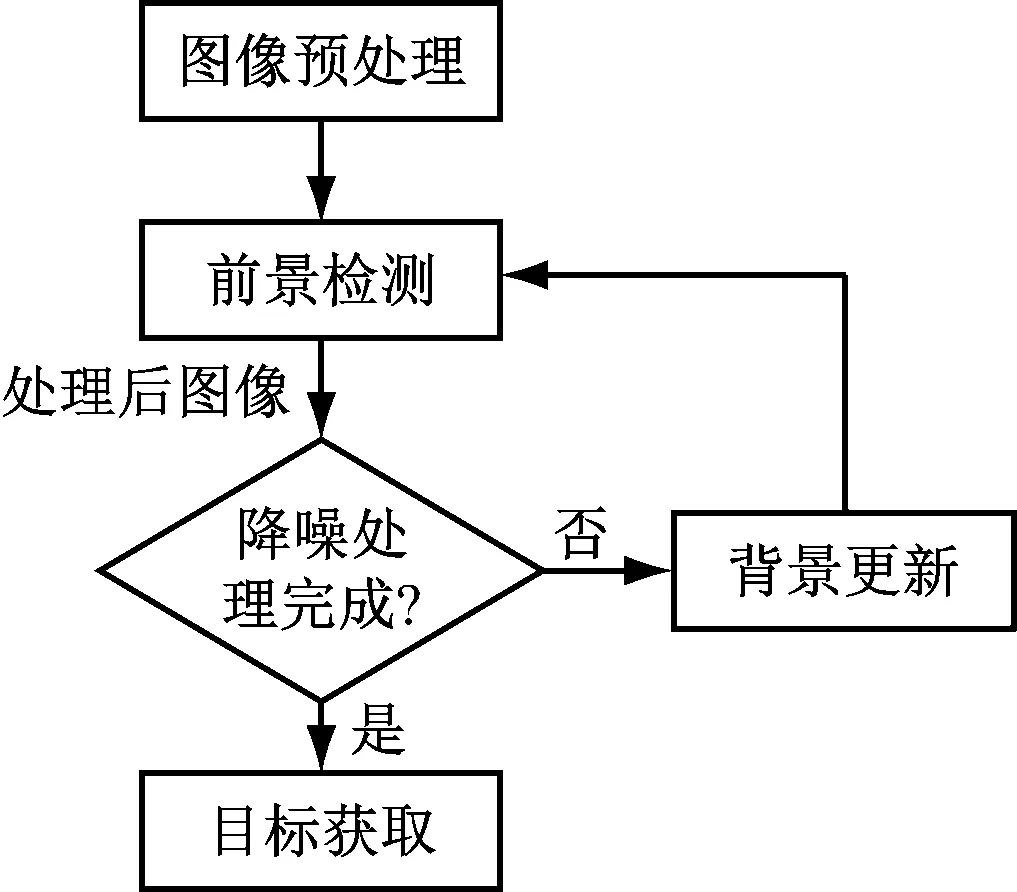
圖1 背景減除法流程圖
從圖1可以看到,通過對于圖像的預處理和背景的更新,能夠有效獲得目標區(qū)域的特征情況。
對于目標中的噪聲干擾情況,可以利用中值濾波等方法加以處理,提高圖像清晰度。常用的背景建模方法包括中值濾波法、混合高斯建模法等。
(1) 中值濾波法
中值濾波的算法思想是對于一組序列的多幀圖像,選擇對應的像素點坐標(x,y),取其亮度值進行排序,選擇中間的數(shù)值,作為整個背景目標的灰度數(shù)值,表達式為
Bt(x,y)=median(It-1(x,y),…,It-N(x,y))
(3)
|It(x,y)-Bt(x,y)|>T
(4)
式中,It為t時刻當前幀灰度值,Bt為對應背景幀灰度,median函數(shù)為選取亮度中值運算,t時刻的中值選取其向前N幀圖像的中值灰度。通過閾值T的選擇可以獲得圖像對應的前景區(qū)域。
(2) 混合高斯法
混合高斯法,是在單高斯方法的基礎上進行的改進,用于圖像背景的分布建模處理。基于高斯分布的原理,假設每個圖像像素的分布均是獨立的,符合高斯分布均值向量μ和協(xié)方差σ的特征。根據(jù)文獻[10]的結果,在已知特定像素點K個亮度值的情況下,得到其t時刻的亮度Xt的概率密度為
(5)

(6)
2 時域分析下的改進算法
2.1 時域分析降噪方法
時域分析法是一種利用圖像相關性的視頻處理方法,由于監(jiān)控視頻是一組連續(xù)的圖像,因此其前后幀之間具有明顯的相關性。
時域降噪的方法有多種,包括平均濾波,中值濾波、遞歸濾波、運動補償濾波等,不同的濾波方式適合不同的場景。本文主要采用的濾波方式為時域中值濾波和運動補償濾波兩種形式。
時域中值濾波如式(3)所示。該方法基于排序理論,利用時域上的中值比較,可以有效消除圖像中孤立的噪聲,提高圖像質(zhì)量。該方法能夠有效消除由于干擾脈沖等形成的圖像噪聲,并能夠有效保留運動目標圖像的邊緣信息。
運動補償濾波是針對運動目標的一種有效的濾波方式。常用的運動補償濾波算法主要為分塊算法。將參考幀進行分割,形成與像素大小相同的N個像素塊。通過對發(fā)生平移運動的像素塊進行預測,得到其運動矢量,實現(xiàn)運動濾波。其表示式為
ft-1(x,y))+0.4×(α×ft(x,y)+
(7)
(1-α)×ft-2×(x,y))
式中,α為算法的控制系數(shù),其取值情況直接影響算法的濾波效果。
利用運動補償濾波的方法能夠有效處理圖像運動形成的拖尾現(xiàn)象。
由于相鄰視頻圖像中只有運動目標發(fā)生了明顯的變化,且存在大量的相關區(qū)域,從而利用時間序列的相關性才能完成濾波處理。相關系數(shù)的選擇需要根據(jù)圖像中的對應坐標狀態(tài),判斷其是否屬于動態(tài)點。設立方形像素塊窗口W,將需要判斷的像素點放置在像素塊的中心,計算其與前后兩幀圖像對應窗口的相關系數(shù)R表示為
(8)
其中,E和D為圖像窗口W中對應像素值的期望和方差。對其建立二值圖像,表示為

(9)
式中,σk為圖像中選擇的閾值情況。
領域相關性的時域分析法雖然可以降低圖像噪聲的干擾,但是其獲得的目標輪廓依然不夠完整,需要通過前景處理獲得更好的圖像效果。最終前景幀的處理算法為

(10)
式中,I為圖像當前幀,B為圖像的背景幀。
傳統(tǒng)的背景處理方法,在待檢測目標進入視頻場景后,對背景像素缺乏更新,從而使得圖像處理中會對前景圖像形成誤判,影響效果。需要進行適當更新,具體如下。
(1) 計算相對位置上像素的亮度增益S,表示式為
(11)
(2) 計算增益均值u,表示式為
(12)
式中,N(bi)為當前圖像中符合同一亮度的像素數(shù)量。
(3) 利用灰度級情況,可以獲得圖像的多個增益均值,用于圖像背景點的像素更新,表達式為
Bt(x,y)=Bt-1(x,y)u(Bt-1(x,y))
(13)
2.2 運動目標跟蹤
運動目標的跟蹤是在圖像識別的基礎上,基于時域分析技術,通過對前后幀圖像中的特征數(shù)據(jù)加以建模和匹配實現(xiàn)的。視頻圖像中運動目標跟蹤的流程圖如圖2所示。
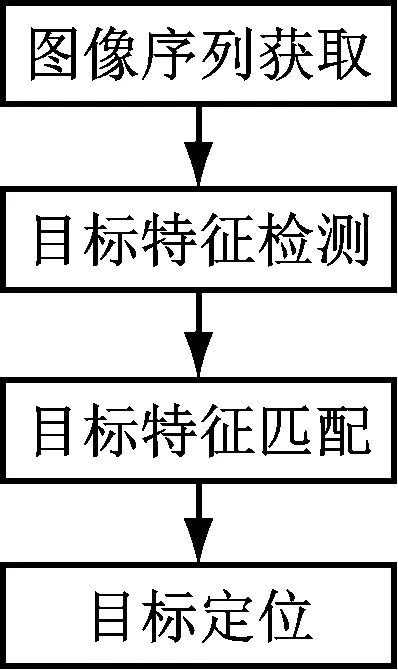
圖2 運動目標跟蹤流程圖
通過從圖像時序序列中獲得目標檢測區(qū)域,提取目標特征進行建模,利用匹配算法對前景目標進行匹配,利用特征數(shù)據(jù)之間的對應關系,實現(xiàn)目標的鎖定和跟蹤。
本文主要是利用Camshift算法實現(xiàn)運動目標的跟蹤效果。算法的核心內(nèi)容在目標質(zhì)心的定位尋找和窗口的自適應。根據(jù)設定運動目標區(qū)域,計算窗口的零階矩和一階矩,并計算該窗口的質(zhì)心坐標。利用尺度自適應函數(shù)的設定完成搜索場景的調(diào)整,對質(zhì)心的距離加以判斷,設定迭代次數(shù)閾值T,若連續(xù)圖像的搜索次數(shù)均大于T,則可以判斷出跟蹤目標被遮擋或離開視頻監(jiān)控區(qū)域。
但是該方法對于目標的跟蹤不能實現(xiàn)自動跟蹤,需要人為設置窗口。圖像顏色的選擇容易受到背景的干擾,搜索窗口中的顏色同樣存在背景影響等問題。針對上述問題,對傳統(tǒng)算法進行改進。
(1) 通過前文中的圖像處理,可以實現(xiàn)對于監(jiān)控區(qū)域前后景圖像的劃分。根據(jù)形態(tài)學處理,可以獲得待檢測目標圖形,使用目標的外切矩形作為目標追蹤的窗口圖形。
(2) 在顏色直方圖的設定過程中,由于背景噪聲顏色會對其產(chǎn)生干擾,因此需要對其進行加權處理,表達式為

(14)
式中,δ為delta函數(shù),b(xi)為色度值函數(shù),用于判斷xi的色度值與第u個bin的關系。xr代表顏色位于目標中心區(qū)域位置,xb代表位于邊緣位置。β為權重系數(shù),加權處理后的圖像對于目標邊緣位置的顏色影響可以忽略。
(3) 當背景顏色與目標顏色接近時,出現(xiàn)的搜索區(qū)域變大和搜索質(zhì)心移位,并進而丟失目標的情況。需要對于目標窗口的尺寸、質(zhì)心位置和移動向量等進行記錄,根據(jù)移動過程中的速度和加速度情況進行下一幀圖像預測。
預測質(zhì)心出現(xiàn)的坐標表達式為
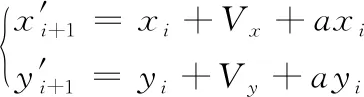
(15)
式中,V代表質(zhì)點的移動速度,a代表質(zhì)點的移動加速度。
目標的相似度利用巴氏系數(shù)加以描述,表示為
(16)
式中,p(y)為候選目標顏色分布,q為模型目標的顏色分布,ρ為模型巴氏系數(shù)。
(4) 當目標出現(xiàn)遮擋的情況,利用Kalman濾波器對目標模型位置加以預測,算法從預測點開始繼續(xù)搜索,實現(xiàn)目標追蹤。
經(jīng)過上述幾個步驟的改進后,算法的流程如圖3所示。

圖3 改進算法流程圖
3 實驗結果與數(shù)據(jù)分析
3.1 實驗參數(shù)
為了驗證本文模型的有效性,利用個人電腦對其進行驗證。電腦配置為CPU:i7-4790k,內(nèi)存8G,系統(tǒng)環(huán)境為Windows 7,利用MATLAB 2018b對進行數(shù)據(jù)對比。
圖像數(shù)據(jù)來自施工現(xiàn)場的拍攝視頻,比較不同情況的圖像效果以及目標跟蹤情況。
3.2 圖像降噪效果對比
模型中的相關系數(shù)閾值取0.7,運動估計閾值取0.1,利用多組圖像取平均值,進行PSNR數(shù)據(jù)對比。不同算法對比結果如表1所示。

表1 不同降噪方法的PSNR值
由表1中的圖像處理效果可以知道,利用上述方法均可以降低工程現(xiàn)場中的噪聲干擾,提高圖像質(zhì)量。但是本文算法的PSNR值效果更為明顯,相比其他算法的圖像質(zhì)量,均有不同程度的提高。利用本文方法處理的圖像效果如圖4所示。
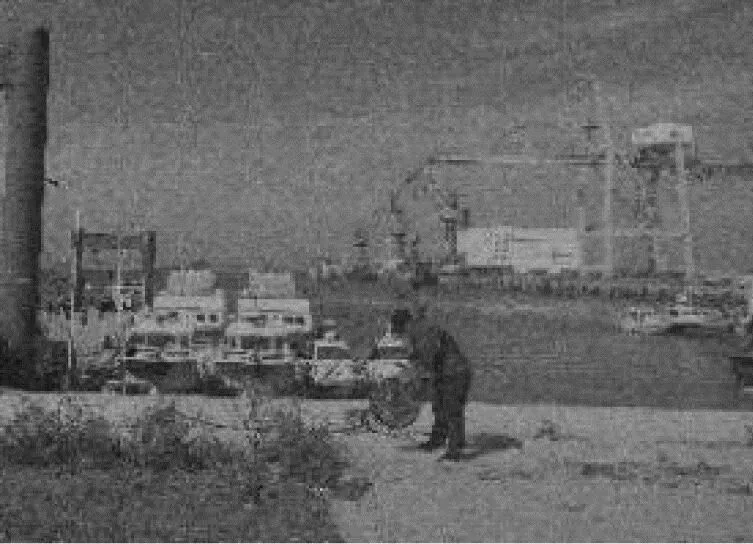
(a) 噪聲圖像
3.3 目標跟蹤效果
在相同的情況下,將本文算法與經(jīng)典算法進行對比。
(1) 背景干擾對比
為了證明本文算法對于背景干擾的處理能力,在存在背景顏色與目標顏色相近的情況下,進行不同算法的數(shù)據(jù)對比,對比結果如表2所示。

表2 干擾情況下的算法對比
從表2可以看到,經(jīng)典的Camshift算法在目標跟蹤過程中出現(xiàn)了明顯的誤判,將背景中的顏色區(qū)域誤認為目標,從而出現(xiàn)了窗口尺寸大幅變化的情況,而本文算法的窗口基本不變,說明沒有受到背景干擾的影響。對比圖像質(zhì)心的變化,也同樣能夠發(fā)現(xiàn),經(jīng)典方法在處理過程中出現(xiàn)了質(zhì)心大幅偏離的現(xiàn)象。本文方法的質(zhì)心一直與實際質(zhì)心一致,說明本文方法有效。
(2) 目標遮擋情況對比
當目標的運動過程中出現(xiàn)了遮擋的情況時,圖像對比結果如圖5所示。

(a) Camshaft 算法處理結果
從圖5可以看到,在出現(xiàn)圖像遮擋的情況下,經(jīng)典算法中由于獲取目標的特征顏色信息丟失,只能通過跟蹤窗口的增大來提高搜索范圍,而目標再次出現(xiàn)以后,由于無法進行準確定位,從而跟蹤失敗。
本文算法中,在相同的情況下,盡管出現(xiàn)了跟蹤目標被遮擋的情況,但此時利用Kalman濾波器,對于目標的移動進行預測,并進而將窗口位置進行調(diào)整,在目標再次出現(xiàn)時,順利完成目標的繼續(xù)跟蹤任務,說明本文算法相比傳統(tǒng)算法,效果更好。
3.4 多目標跟蹤情況
對于多目標的場景進行跟蹤情況測試,驗證本文算法的多目標跟蹤能力。實驗結果如圖6所示。

圖6 多目標跟蹤效果圖
從圖6可以看到,對于多目標跟蹤,盡管不同目標間依然出現(xiàn)了遮擋情況,但是本文算法依然準確完成了目標的實時跟蹤任務,未發(fā)生目標丟失情況。
在跟蹤目標數(shù)量不同的情況下,本文算法的平均時間還是有所不同的,對比結果如圖7所示。

圖7 目標數(shù)量與時間關系
從圖8可以看到,本文的改進算法在進行目標跟蹤的過程中,消耗時間隨著跟蹤目標數(shù)量的增多而增大,這與算法的工作量增大有關。需要提高處理器的工作效率來降低時間損耗。
4 總結
本文主要研究了在電力現(xiàn)場的視頻監(jiān)控算法,利用時域分析,對Camshift算法進行改進,降低圖像噪聲,并利用區(qū)域加權的方式減少目標窗口邊緣信息對于目標跟蹤的影響,結合Kalman濾波器,有效實現(xiàn)目標路徑預測,從而在目標出現(xiàn)遮擋問題或者與背景顏色接近的情況下依然能夠有效實現(xiàn)目標跟蹤。通過與經(jīng)典Camshift算法的對比,本文算法較好地完成了目標識別和目標跟蹤的任務,可以適用于電力工程現(xiàn)場的視頻監(jiān)控。
猜你喜歡
教學考試(高考化學)(2022年5期)2022-11-19 14:15:16
汽車工程師(2021年12期)2022-01-17 02:29:54
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創(chuàng)新大賽)(2020年7期)2020-07-27 08:26:32
活力(2019年21期)2019-04-01 12:18:06
中國自行車(2018年10期)2018-11-30 02:09:04
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
紡織服裝流行趨勢展望(2016年1期)2016-05-04 03:45:20
語文知識(2015年11期)2015-02-28 22:01:59
中國衛(wèi)生(2014年10期)2014-11-12 13:10:16
