“運動控制系統(tǒng)”課程設(shè)計在SRTP中的探索
2024-01-12 02:45:46李新德閆冬文李和清
電氣電子教學學報 2023年6期
李新德 閆冬文 李和清 余 樂
(1.東南大學 自動化學院,南京 210096)(2.東南大學 網(wǎng)絡(luò)空間安全學院,南京 210096)
隨著我國高等教育的不斷改革,SRTP(Student Research Training Program,大學生科研訓練計劃)已在高校中得到廣泛認可,在培養(yǎng)學生創(chuàng)新思維和創(chuàng)新能力方面,具有較好的引導(dǎo)和推動作用。“運動控制系統(tǒng)”是自動化類專業(yè)本科階段的核心課程,在SRTP中廣泛應(yīng)用,但多數(shù)學生僅停留在基礎(chǔ)理論層面,難以較好地應(yīng)用于實戰(zhàn)工程項目中。項目導(dǎo)向型教學模式是讓學生從“0”到“1”完成與課程相關(guān)的項目,提倡“理論與實踐結(jié)合,課堂與實驗室結(jié)合,能力與項目結(jié)合”的教學新方式。基于項目導(dǎo)向型的“運動控制系統(tǒng)”課程設(shè)計模式有助于培養(yǎng)學生的綜合實踐能力和項目管理能力,對全面提升課程教學質(zhì)量具有重要意義。
1 項目導(dǎo)向型課程設(shè)計實施的必要性
“運動控制系統(tǒng)”是電力電子技術(shù)、計算機控制技術(shù)、自動控制原理和電機學等多學科相互交叉的課程,具有綜合性強、知識面廣的特點[1]。如果采用傳統(tǒng)教學方式,即課堂講授理論知識、講解例題,學生理解起來較為抽象,可能造成學生只會做題,不會動手的“怪”現(xiàn)象,嚴重偏離教學初衷[2]。
基于上述問題,本文以“運動控制系統(tǒng)”課程設(shè)計為例,提出項目導(dǎo)向型的教學模式,如圖1所示。該教學模式圍繞課程知識的運用為中心,選取實際應(yīng)用中典型的若干項目作為課程載體,將理論知識和實戰(zhàn)應(yīng)用技能融合到項目中,學生通過完成項目中設(shè)定的任務(wù)達到自我綜合能力提升的教學目的[3]。在傳統(tǒng)教課方式的基礎(chǔ)上,以實踐為前提,知識運用為目標,以學生合作型自主學習為主,教師指導(dǎo)為輔,全面培養(yǎng)學生從“敢想,敢說,敢做”到“能想,能說,能做”。
在“運動控制系統(tǒng)”中采用項目導(dǎo)向型教學模式,既保留了傳統(tǒng)教學模式的優(yōu)點,又充分融合了實踐過程與知識運用。同時強調(diào)了以項目實踐為教學導(dǎo)向,讓學生在項目中既能鞏固、運用知識,又能培養(yǎng)團隊合作、創(chuàng)新以及問題的分析和處理能力。
2 項目導(dǎo)向型課程設(shè)計的實施方案
“運動控制系統(tǒng)”課程的重要內(nèi)容有交、直流調(diào)速系統(tǒng)兩個部分,其中直流電機的調(diào)速系統(tǒng)具有結(jié)構(gòu)簡單,應(yīng)用范圍廣的特點,是經(jīng)典的學習和分析對象[4]。本文以直流調(diào)速系統(tǒng)為知識背景,提出以“兩棲無人機的研制”作為項目導(dǎo)向型教學實例。
兩棲無人機的五大設(shè)計環(huán)節(jié)如圖2所示,分為三大部分:①原理分析:兩棲無人機的飛行原理和控制方案設(shè)計;②硬件設(shè)計:系統(tǒng)硬件框架結(jié)構(gòu)設(shè)計,無人機3D模型設(shè)計,硬件選型以及電路設(shè)計;③軟件設(shè)計:無人機控制算法設(shè)計。本節(jié)以“兩棲無人機的研制”項目的三大部分實施過程中涉及的知識板塊為背景,討論項目導(dǎo)向型教學模式中學生和教師兩個主體間存在的交互方式以及相互影響發(fā)揮的作用。

圖2 兩棲無人機設(shè)計環(huán)節(jié)
2.1 自主學習與團隊協(xié)作
由知識與實踐導(dǎo)向的實驗型合作項目能培養(yǎng)學生的團隊協(xié)作能力。在“兩棲無人機的研制”項目中,從理論分析到硬件和軟件設(shè)計,包括飛行原理分析、構(gòu)建系統(tǒng)結(jié)構(gòu)框架、硬件選型與設(shè)計、飛行控制方案設(shè)計和軟件實現(xiàn)等步驟,由學生組成的項目團隊協(xié)商完成。通過自主學習與團隊協(xié)作能力培養(yǎng),重點培養(yǎng)學生以下幾方面能力:
1)鞏固理論知識和統(tǒng)籌能力
兩棲無人機設(shè)計中的硬件和軟件設(shè)計,如電子元件選取、電路設(shè)計、PCB板制作、電路板焊接、單片機程序?qū)崿F(xiàn)等,在模擬電路、數(shù)字電路、單片機、C語言等專業(yè)基礎(chǔ)課中均有涉及。
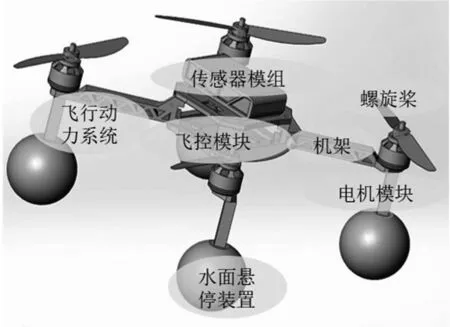
在“運動控制系統(tǒng)”課程中采用項目導(dǎo)向型教學模式能夠鞏固學生所學過的知識,并使其在項目中得到應(yīng)用。如圖3所示是兩棲無人機的系統(tǒng)組成,可以看出小到濾波電路、穩(wěn)壓電路的設(shè)計,大到整個系統(tǒng)硬件架構(gòu)設(shè)計,均需要多門課程知識交織綜合才能完成。

圖3 兩棲無人機的系統(tǒng)組成框圖
2)知識拓展和進階學習能力
如圖4所示是兩棲無人機姿態(tài)控制結(jié)構(gòu)框圖,學生需要學習和應(yīng)用姿態(tài)控制算法,自行建立無人機的姿態(tài)運算模型。其中,姿態(tài)控制需要復(fù)雜的數(shù)學運算求解,如建立動力學和運動學模型、姿態(tài)解算等,均需要學生自行拓展學習。

圖4 兩棲無人機姿態(tài)控制結(jié)構(gòu)框圖
學生通過自主學習和探索,以舊知識為基礎(chǔ),探索式的發(fā)現(xiàn)和掌握新知識。該過程從意識層面上提高學生的求知欲和對新知識的包容度,有利于培養(yǎng)學生攻克困難的信心,使學生形成正向回饋,在不斷學習中實現(xiàn)對無人機姿態(tài)的可靠、快速、精確的控制。
3)多學科交叉和創(chuàng)新能力
創(chuàng)新是技術(shù)進步的核心,是引領(lǐng)發(fā)展的第一驅(qū)動力。多學科交叉具有綜合性、系統(tǒng)性和滲透性等特點,有利于培養(yǎng)學生成為復(fù)合型人才。“兩棲無人機的研制”是一個系統(tǒng)性項目,涉及機械工程、電子工程、控制工程等多學科領(lǐng)域。如圖5所示是兩棲無人機的機體模型,機體3D建模與仿真常使用SOLIDWORKS、CATIA等專業(yè)軟件。該內(nèi)容在“運動控制系統(tǒng)”課程中沒有涉及,學生需要根據(jù)項目需求的自行建模分析。通過多學科交叉融合,有助于學生開拓視野,更好地完成項目研究。
(a)水空無人機模型
4)學思并用,團隊管理能力
SRTP通常由2~5人組成的項目團隊承擔,其中1人擔任隊長。在管理學領(lǐng)域可稱之為“組織”。任何一個有組織的集體活動,不論其性質(zhì)如何,都只有在管理者對它加以管理的條件下,才能按照所要求的方向進行。“兩棲無人機系統(tǒng)的研制”項目需要小組成員盡己所能搜集資料,集思廣益,討論制定項目具體的技術(shù)方案。隊長根據(jù)組員的情況和項目難度,將完整項目拆解,形成完整的技術(shù)方案。同時,團隊定期召開討論會議,總結(jié)項目研究進展[5]。這里我們發(fā)現(xiàn)團隊的定期會議尤為重要,提出“周組會”和“月組會”兩種方案。前者有利于及時發(fā)現(xiàn)項目的短期內(nèi)存在的難題,后者注重中長期科研任務(wù)的規(guī)劃和總結(jié)。
2.2 教師指導(dǎo)為輔
在項目導(dǎo)向型教學模式中,教師扮演“技術(shù)顧問”的角色。包括確定項目任務(wù)、制定項目驗收時間節(jié)點、定期答疑和最終考核標準等[6]。在“兩棲無人機系統(tǒng)的研制”項目中,根據(jù)團隊定期提交的總結(jié)報告提供指導(dǎo)性意見,避免研究方法和研究方向出現(xiàn)偏差,對于團隊提出的科研進展難題,尋求最優(yōu)解決方案。此外,實驗室科研氛圍也是開展SRTP成敗的關(guān)鍵,在“兩棲無人機系統(tǒng)的研制”項目中,配置了除教師之外的“科研小導(dǎo)師”,他們是由一群科研成果突出的“學長、學姐”等組成,以此營造“幫扶型、鼓勵型和分享型”的科研團隊,促進實驗室良好的科研氛圍。
2.3 項目成果考核
如圖6所示是基于項目導(dǎo)向型教學模式,不同團隊完成的兩棲無人機項目成果實物圖。傳統(tǒng)的教學成果以考試成績論英雄的方式不再適用,我們采用學生自評、組員互評、項目答辯得分和教師評分的綜合評價方式[7]。同時,鼓勵學生將有價值的項目成果積極參與各類別科研競賽、申請知識產(chǎn)權(quán)、發(fā)表國內(nèi)外期刊論文等,做到科研成果有效輸出和反饋。

(a)水空兩棲無人機實物圖(由團隊1開發(fā))
3 項目導(dǎo)向型課程設(shè)計在SRTP中的思考
SRTP為學生培養(yǎng)科研能力、創(chuàng)新意識提供了廣闊的平臺,但多數(shù)學生僅停留在基礎(chǔ)理論層面,難以較好地將理論知識應(yīng)用于實戰(zhàn)工程項目中,缺乏知識應(yīng)用到實踐中的意識,如果不提前培養(yǎng)他們的動手實踐能力,即便提供發(fā)展平臺,也無法發(fā)揮其自身優(yōu)勢[8]。“運動控制系統(tǒng)”是一門綜合其他理論課程而成的強實踐性課程,為學生今后進行科研項目有較大的促進作用。在這門課程中采用項目導(dǎo)向型教學模式有助于培養(yǎng)學生的“項目意識”和“知識實踐意識”。
在課程項目中,學生經(jīng)歷了發(fā)現(xiàn)問題,交流、合作并解決問題的過程,這將有助于培養(yǎng)其自身的積極性和主觀能動性,增強創(chuàng)新意識和動手能力,引導(dǎo)形成嚴謹?shù)目茖W態(tài)度以及團隊合作精神[9]。對培養(yǎng)單位而言,教師與學生均是教學體系中的主人,在實踐中應(yīng)積極探索新時代背景下的教學新需求。在“運動控制系統(tǒng)”課程中采用項目導(dǎo)向型教學模式有利于讓學生重視理論與實踐融合發(fā)展;有利于推動學生對學習和科研的新認知;有利于培養(yǎng)創(chuàng)新性、綜合性人才,響應(yīng)國家對高校培育高質(zhì)量人才的需求和號召,進一步提高學生的綜合素質(zhì)[10]。
4 結(jié)語
“運動控制系統(tǒng)”是一門緊密結(jié)合理論和實踐的綜合性課程。針對教學過程中發(fā)現(xiàn)的新需求和新問題,本文提出了項目導(dǎo)向型教學新模式,該模式讓學生從“0”到“1”完成與課程相關(guān)項目,提倡“理論與實踐結(jié)合,課堂與實驗室結(jié)合,能力與項目結(jié)合”的教學新模式;我們以直流調(diào)速系統(tǒng)為知識背景,設(shè)置“兩棲無人機的研制”作為項目導(dǎo)向型教學實例,通過培養(yǎng)學生“鞏固理論知識和統(tǒng)籌”和“多學科交叉和創(chuàng)新”等能力,有效提升學生綜合科研素養(yǎng);基于項目導(dǎo)向型的“運動控制系統(tǒng)”課程教學新模式,對全面提升課程教學質(zhì)量具有重要意義。學生通過解決實際問題,提高了綜合實踐能力和項目管理能力。
猜你喜歡
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
少男少女·教育管理(2022年3期)2022-05-12 23:54:31
內(nèi)蒙古教育(2021年20期)2021-03-08 01:09:14
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(shù)(2019年11期)2019-12-09 09:14:30
人大建設(shè)(2018年6期)2018-08-16 07:23:10
文理導(dǎo)航·科普童話(2017年5期)2018-02-10 19:42:14
新課程研究(2016年21期)2016-02-28 19:28:26
小星星·閱讀100分(低年級)(2015年10期)2015-10-22 08:30:04
學習月刊(2015年18期)2015-07-09 05:41:22