用A 星算法進(jìn)行電動汽車快充電樁布局優(yōu)化分析
2024-01-16 12:40:06郭明昊秦林杰吳浩民焦烯奧
科學(xué)技術(shù)創(chuàng)新 2024年1期
關(guān)鍵詞:區(qū)域
常 昊,郭明昊,秦林杰,吳浩民,焦烯奧
(南京工程學(xué)院 電力工程學(xué)院,江蘇 南京)
引言
隨著中國經(jīng)濟(jì)迅猛發(fā)展,中國的汽車保有量在不斷增加,由于近年來對環(huán)境保護(hù)的要求也在不斷提高,新能源電動車無疑成了代替燃油車的最佳選擇。伴隨電動汽車市場的興起,充電樁及其配套基礎(chǔ)設(shè)施成為重要需求。因此,相關(guān)電動汽車企業(yè)在充電樁建設(shè)方面投入了大量的資金,許多充電樁被安置在城市內(nèi),為電動汽車提供了充足的能源保障。
然而,目前電動汽車充電樁存在著一樁難求、城鄉(xiāng)分布不均勻、多樁閑置、技術(shù)隱患大、電價不統(tǒng)一等問題,這將嚴(yán)重制約著電動汽車的發(fā)展。因此,對充電樁進(jìn)行優(yōu)化布局,是推動新能源電動汽車發(fā)展的重要舉措。
充電樁主要有“快充”和“慢充”兩種類型,由于“快充電樁”可以適應(yīng)市內(nèi)巨大的交通車流量,我們選取江蘇南京市作為研究對象,對市內(nèi)“快充電樁”分布進(jìn)行優(yōu)化布局。我們研究此問題主要使用了“A 星算法”(即“A-star 算法”),根據(jù)文獻(xiàn)[1],“A 星算法(也稱為A*算法)”是基于“Dijkstra 算法”的一種典型的、啟發(fā)式的最短路徑搜索算法,其本質(zhì)是從起點開始搜索代價值最小的節(jié)點作為下一次搜索的起點,直到搜索到目標(biāo)節(jié)點為止,由于搜索從一開始就保證代價估計值是最小的,最終得到的路徑代價值也同樣最小。
該算法被廣泛運(yùn)用于最優(yōu)路徑規(guī)劃等問題,我們將運(yùn)用它進(jìn)行南京市新能源電動汽車充電樁的優(yōu)化布局分析
1 A 星算法
1.1 “Dijkstra 算法”
“A 星算法”的思路來源于“Dijkstra 算法”,這是一種“半啟發(fā)式搜索路徑算法”,以求起始結(jié)點與區(qū)域中所有其他結(jié)點的估價函數(shù)來獲得最短路徑。
根據(jù)文獻(xiàn)[2],“Dijkstra 算法”的執(zhí)行過程定義如下(程序流程如圖1 所示):
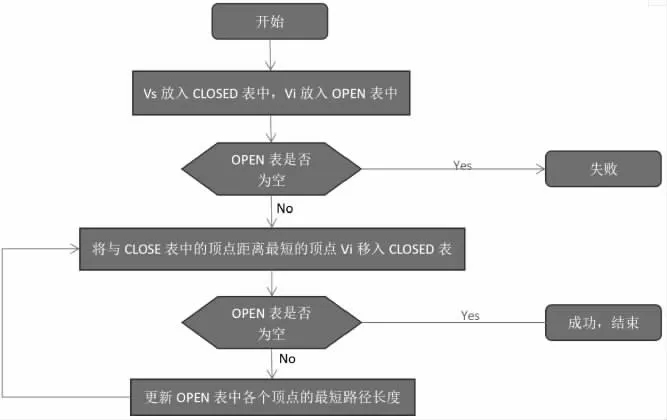
圖1 “Dijkstra 算法”程序的流程
(1) 定義名為OPEN 和CLOSED 的兩個表;OPEN 用于存放未考察過的結(jié)點,CLOSED 表用于存放已考察過的結(jié)點。
(2) 假設(shè)圖中共有n 個結(jié)點,選取結(jié)點VS 為起點,目標(biāo)結(jié)點為Vi(除VS 的其余結(jié)點,i≤n),將起點VS 放入CLOSED 表中,Vi 放入OPEN 表中。
(3) 判斷OPEN 表是否為空,為空的話表示搜索過程失敗。
(4) 如果不為空的話,計算CLOSED 表中的結(jié)點與Vi 的距離,并將距離最短的結(jié)點Vi 移入CLOSED 表。
(5) CLOSED 表每加入一個新結(jié)點Vi 后要對OPEN 表中各個結(jié)點的最短路徑長度進(jìn)行更新。
(6) 跳轉(zhuǎn)到步驟(4),直至OPEN 表為空。
然而,“Dijkstra 算法”以求起始結(jié)點與區(qū)域中所有其他結(jié)點的估價函數(shù)獲得最短路徑,該算法涉及區(qū)域大、搜索效率較低,難以適用于多障礙、多線路的復(fù)雜最優(yōu)路徑規(guī)劃問題,因此我們選用根據(jù)該算法改良的“A 星算法”。
1.2 “A 星算法”的概念
“A 星算法”在“Dijkstra 算法”的基礎(chǔ)上引入了啟發(fā)函數(shù),加快了算法收斂速度,由文獻(xiàn)[2]知道,“A 星算法”是一種啟發(fā)式搜索算法,即通過評價函數(shù)對網(wǎng)格上的點進(jìn)行價評估來啟發(fā)式地尋找目標(biāo)結(jié)點,基于最小的代價來尋找通往目標(biāo)結(jié)點最短且最適合的路徑。
A 星算法的估價函數(shù)如下:
式中:f(x,y)表示當(dāng)前結(jié)點到目標(biāo)結(jié)點的估計距離;g(x,y)表示當(dāng)前結(jié)點到考察結(jié)點的實際距離(即既定代價);h(x,y)表示考察結(jié)點到目標(biāo)結(jié)點的估計距離(即估計代價)。
不同于傳統(tǒng)的“遺傳算法”、“Dijkstra 算法”,此算法的核心是在質(zhì)點移動的過程中對起始結(jié)點到當(dāng)前結(jié)點的既定代價與當(dāng)前結(jié)點到目標(biāo)結(jié)點的估計代價進(jìn)行實時運(yùn)算,在網(wǎng)格模型中起止位置間對每一個結(jié)點進(jìn)行目標(biāo)路徑搜索,最終可以得出最優(yōu)規(guī)劃路徑,因此該方法具有啟發(fā)性和靈活性。
“A 星算法”尋找路徑方式程序的大體思路如圖2 所示,其中“OPEN 集合”表示未訪問的結(jié)點,“CLOSE 集合”表示已經(jīng)訪問過的結(jié)點。
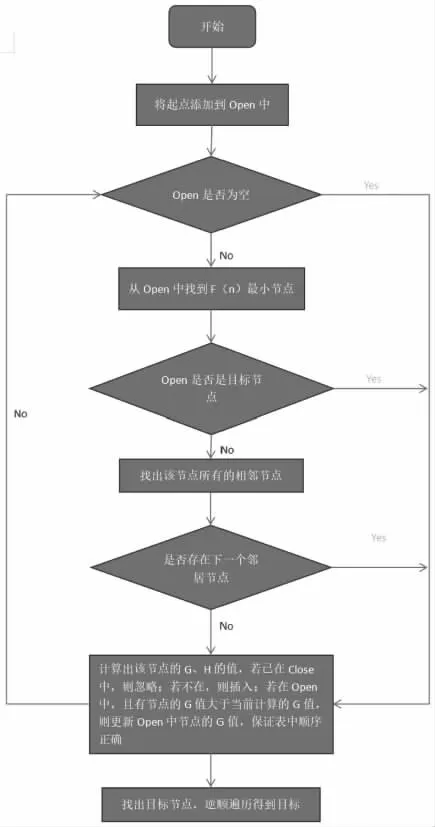
圖2 “A 星算法”程序的流程
(1) 我們選定起始點為“START 結(jié)點”,從START開始,將該結(jié)點首先放入OPEN 集合的列表中。
(2) 對起始點START 的周圍結(jié)點進(jìn)行處理,通常在網(wǎng)格圖中結(jié)點周圍有8 個方位,將這8 個方位的父結(jié)點設(shè)為該“START 結(jié)點”,同樣放入OPEN 集合的列表中。
(3) 待周圍結(jié)點全部搜索完畢后,將初始“START 結(jié)點”從OPEN 集合中移除,并放入CLOSE集合中。
(4) 先遍歷這些預(yù)處理的點,判定其是否為“可用結(jié)點”(不是障礙結(jié)點或不在CLOSE 集合中)。若確定為“可用結(jié)點”,則計算那些處理結(jié)點的f(x,y)、g(x,y)、h(x,y)值,同時在計算的過程中比較各個結(jié)點既定代價、估計代價的大小,每輪循環(huán)都將估價函數(shù)值最低的結(jié)點排在OPEN 集合里面;若確定為“不可用結(jié)點”,則將這些結(jié)點直接放入CLOSE 集合中。
(5) 若某個處理結(jié)點已在OPEN 集合中,檢查使用新的路徑算出的估價函數(shù)是否更低,如果更低,則進(jìn)行結(jié)點更新,并實時調(diào)整目標(biāo)路徑,更新時也需要及時調(diào)整當(dāng)前各結(jié)點的估價函數(shù)大小排序,否則不更新。
(6) 最后判斷該結(jié)點相鄰方格是否為終點,如果不是,則重復(fù)第(4)、第(5)步,如果是,則結(jié)束估價函數(shù)運(yùn)算排序程序,根據(jù)之前每個經(jīng)過結(jié)點周圍已存在的父節(jié)點,反向標(biāo)記,找到終點并輸出最終優(yōu)化路徑,最后結(jié)束全部程序。
1.3 “曼哈頓距離”和“歐幾里得距離”
A 星算法的估價函數(shù)h(x,y)表示當(dāng)前結(jié)點到目標(biāo)結(jié)點的估計距離(即估計代價),主要可以由“曼哈頓距離”與“歐幾里得距離”表示,h(x,y)也分別對應(yīng)著曼哈頓啟發(fā)函數(shù)與歐幾里得啟發(fā)函數(shù),因此得到最終目標(biāo)路徑的結(jié)果取決于h(x,y)所使用的啟發(fā)函數(shù)。
由文獻(xiàn)[3]和文獻(xiàn)[4]得知,本算法使用的有曼哈頓算法和歐幾里得算法。
曼哈頓啟發(fā)函數(shù)為:
式中:D 表示一個柵格的曼哈頓距離;c 表示當(dāng)前結(jié)點;goal 表示目標(biāo)結(jié)點。
歐幾里得啟發(fā)函數(shù)為:
式中:c 代表當(dāng)前結(jié)點;goal 代表目標(biāo)結(jié)點。
因為歐幾里得距離接近兩點最短距離,所以得到的路徑為最短距離,同時結(jié)合曼哈頓啟發(fā)算法,可以保證路徑的穩(wěn)定性,計算后得到最優(yōu)途徑路線。
“曼哈頓距離”取決于考察結(jié)點與起始結(jié)點、終止結(jié)點的正交型距離(如圖3 所示),在網(wǎng)格圖中操作處理和運(yùn)算較為方便,但是要求單位網(wǎng)格邊長遠(yuǎn)小于目標(biāo)路徑長度以減小誤差;而“歐幾里得距離”則直接量取起點和終點間的直線距離,即為兩點間最短距離(如圖4 所示),誤差小、準(zhǔn)確性高,但是對程序匯編的要求較高,運(yùn)算相對復(fù)雜。
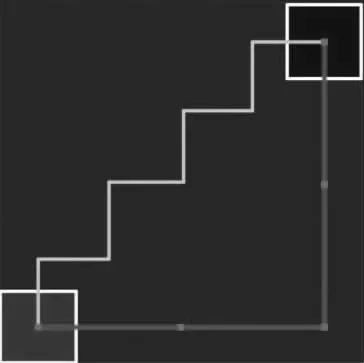
圖3 曼哈頓距離

圖4 歐幾里得距離
我們目前在對充電樁優(yōu)化布局的研究中主要使用的是“曼哈頓啟發(fā)函數(shù)”,今后可能根據(jù)“歐幾里得啟發(fā)函數(shù)”對“A 星算法”進(jìn)行改良,進(jìn)而解決實際生活中更為復(fù)雜的布局問題。
2 使用A 星算法解決電動充電樁優(yōu)化布局問題
2.1 構(gòu)建網(wǎng)格圖
為實現(xiàn)A 星算法進(jìn)行布局的優(yōu)化分析,我們團(tuán)隊聯(lián)系實際,以南京市為整體研究對象,查找了目前清晰度較高的南京市地圖,以單個小格為單位元,繪制出網(wǎng)格表,并以圖層疊加方式將其覆蓋,根據(jù)生活經(jīng)驗和實際考察,將電動汽車難以通行的地方(如山、江、湖)作為障礙物,制作出簡單的網(wǎng)格圖(如圖5 所示),之后又將這些障礙物在網(wǎng)格圖上標(biāo)示(如圖6 所示),之后借助MATLAB2022a 進(jìn)行仿真模擬,再根據(jù)“A 星算法”的估價函數(shù)進(jìn)行運(yùn)算,最終求得最優(yōu)路徑。

圖5 構(gòu)建實物網(wǎng)格圖模型

圖6 構(gòu)建簡易網(wǎng)格圖模型
我們將以此圖為范例,對現(xiàn)有的“A 星算法”計算最優(yōu)路徑啟發(fā)函數(shù)進(jìn)行改進(jìn),實現(xiàn)新能源汽車充電樁的優(yōu)化布局分析。
2.2 起點和終點的選定
在“A 星算法”最優(yōu)路徑的搜索中,除障礙物以外,還需要有起點和終點位置。我們團(tuán)隊多方查找相關(guān)資料,結(jié)合實地背景通過線上線下相結(jié)合的方式,獲得南京市人口密度圖與南京市道路交通分布圖,尋找南京市邊界的人口密度高值區(qū)與城際道路發(fā)達(dá)區(qū)域的交集,將該區(qū)域抽象化為一個點,作為其中一個起止點,以同樣的方法在南京市邊界內(nèi)共找出5 個點(如圖5、圖6 所示),分別標(biāo)記為1 到5,在南京市邊界上近似均勻分布。
為避免片面性,我們將這5 個點對應(yīng)的周圍極小的區(qū)域類比為數(shù)學(xué)上的“鄰域”思想,由文獻(xiàn)[5]可知,點集,稱為點P0的δ 鄰域。例如,在平面上,如圖7 所示。
圖7 結(jié)點及其鄰域模型
2.3 聯(lián)系A(chǔ) 星算法進(jìn)行的充電樁布局分析
在運(yùn)用A 星算法解決問題的具體實施步驟如下:
(1) 在一定區(qū)域內(nèi)選取5 個結(jié)點(及其鄰域)為初始結(jié)點和目標(biāo)結(jié)點。
(2) 根據(jù)實際區(qū)域的障礙物在網(wǎng)格對應(yīng)位置設(shè)置障礙物。
(3) 根據(jù)A 星算法的“曼哈頓啟發(fā)函數(shù)”尋找出最短路徑。
(4) 再重復(fù)以上步驟找出其他路徑,得到其交點。
我們將對這5 個點(及其鄰域)分別作為該算法“曼哈頓距離”的起止點,我們先創(chuàng)建“OPEN 集合”和“CLOSE 集合”兩個列表,分別用于存放網(wǎng)格圖中未被處理的結(jié)點與已被處理的結(jié)點,我們將結(jié)點(區(qū)域)1定為“START 結(jié)點”,根據(jù)1.2 中的“A 星算法”的相關(guān)流程進(jìn)行運(yùn)算,再用MATLAB2022a 對其進(jìn)行仿真模擬,單一路徑仿真結(jié)果如圖8 所示。

圖8 使用MATLAB2022a 得到的單一路徑仿真結(jié)果
根據(jù)圖8,我們以中間結(jié)點(57,81)為例,介紹A星算法的運(yùn)算流程,搜索完該結(jié)點周圍的8 個父結(jié)點后,判斷出其正下方、右下方兩個父節(jié)點為“不可用結(jié)點”,將其余父結(jié)點入曼哈頓距離式中。
我們可以以當(dāng)前考察結(jié)點作為臨時原點,將其周圍的父節(jié)點用二維數(shù)組(i,j)表示,其中i、j 可取-1、0、1;在此處,二維數(shù)組(i,j)不可取(1,-1)、(0,-1),并且在同一圖表中D 為定值,取,代入得
得到6 個估價函數(shù)值,將其進(jìn)行逐一比較,確定其中的最小值,即實現(xiàn)啟發(fā)式函數(shù)的搜索功能,同時也是對該函數(shù)功能的檢驗。經(jīng)驗證,我們可以得到,即f6是最小估價函數(shù)值,即(-1,-1)將作為下一次“A 星算法”的“START 結(jié)點”進(jìn)行下一輪運(yùn)算,最終完成所有相關(guān)結(jié)點的遍歷,得到最優(yōu)搜索路徑。該路徑規(guī)劃方式完全符合原先預(yù)期,并更新最優(yōu)路徑的點集。
我們團(tuán)隊基于A 星算法在最優(yōu)路徑規(guī)劃方面的現(xiàn)有成果,結(jié)合南京市障礙的網(wǎng)格圖,通過修改A 星算法內(nèi)的相關(guān)參數(shù),在多個非相鄰點之間尋找最優(yōu)路徑,將1 到5 這5 個結(jié)點(及其鄰域)按照搜索單一路徑的方法進(jìn)行相應(yīng)運(yùn)算,最終結(jié)果如圖9 所示。
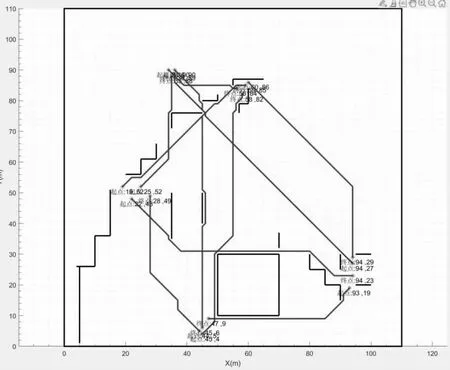
圖9 使用MATLAB2022a 得到的單一路徑仿真最終結(jié)果
根據(jù)圖9,我們將人口密集及交通發(fā)達(dá)地區(qū)劃為“外圍區(qū)域”,將路徑交點周圍區(qū)域劃為“內(nèi)部區(qū)域”(如圖10 所示),即鎖定圖線分布較密集的“內(nèi)部區(qū)域”作為適合安置快充電樁的實際地點。后期我們將進(jìn)行實地考察觀測,在圖線相對密集的部分區(qū)域內(nèi)尋找適合建造充電樁的地點,已達(dá)成優(yōu)化布局的最終目的。

圖10 鎖定MATLAB2022a 仿真結(jié)果中符合要求的區(qū)域
【注:圖9、圖10 中的數(shù)據(jù)分別為:第一區(qū)域:“起點(24,90)”“終點(26,88)”“起點(33,90)”“終點(33,88)”;第二區(qū)域:“起點(60,86)”“起點(59,85)”“終點(56,84)”“終點(58,82)”;第三區(qū)域:“起點((19,52)”“起 點(25,52)”“終 點(22,48)”“終 點(28,49)”;第四區(qū)域:“終點(94,29)”“起點(94,27)”“終點(94,23)”“起點(93,19)”;第五區(qū)域:“終點(47,9)”“終點(45,6)”“起點(44,5)”“起點(45,4)”。(五個區(qū)域自左至右、自上向下排序)】
結(jié)束語
本文利用“A 星算法”現(xiàn)有的應(yīng)用形式,將對電動汽車最優(yōu)路徑分析推廣到充電樁布局規(guī)劃,旨在解決現(xiàn)實中充電樁時空分布不均勻等實際問題,并為“A星算法”后續(xù)的改良以及其他方面的應(yīng)用提供了思路,具有一定的創(chuàng)新性和應(yīng)用價值。發(fā)揮現(xiàn)有“A 星算法”的優(yōu)勢,結(jié)合一系列改良“A 星算法”,進(jìn)一步提高了該算法的實用性。我們在MATLAB2022a 中,將城市道路及障礙模型網(wǎng)格化,對優(yōu)化路徑進(jìn)行一系列仿真實驗,先根據(jù)路徑交點得到一個優(yōu)化布局位置,再依此進(jìn)行推廣,最終解決布局問題。
然而,本算法在解決此問題中無法同時考慮復(fù)雜因素的影響,在后續(xù)的研究中,我們將繼續(xù)細(xì)化該模型,緊密結(jié)合現(xiàn)有城市背景,充分考慮更多現(xiàn)實因素,如有必要還可能與遺傳算法、模擬退火算法等其他經(jīng)典算法(根據(jù)參考文獻(xiàn)[6]、文獻(xiàn)[7])相結(jié)合對現(xiàn)有算法進(jìn)行優(yōu)化改進(jìn),進(jìn)一步完善這一思路,使這一改良分析方案成為今后城市建設(shè)方案中的參考之一。
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財經(jīng)大學(xué)學(xué)報(2015年3期)2015-12-10 03:49:15