基于閃電搜索的多傳感器交叉提示算法
2024-01-17 08:57:16韋道知李俊偉謝家豪
探測與控制學(xué)報 2023年6期
韋道知,李俊偉,李 琦,謝家豪,劉 丹
(1.空軍工程大學(xué)防空反導(dǎo)學(xué)院,陜西 西安 710051;2.航天工程大學(xué),北京 101400)
0 引言
在研究傳感器分配管理時,一般將重點放在靜態(tài)決策上,而對傳感器探測聯(lián)盟組建后的執(zhí)行調(diào)度過程研究較少。實際作戰(zhàn)環(huán)境瞬息萬變,而前后兩種探測聯(lián)盟方案沒有關(guān)聯(lián)且多數(shù)傳感器管理方法只追求傳感器網(wǎng)絡(luò)效能最大化,沒有針對實際需求來對傳感器進(jìn)行優(yōu)化,沒有考慮實戰(zhàn)條件,造成傳感器資源浪費。文獻(xiàn)[1]針對以上問題提出了多傳感器交叉提示技術(shù)并給出了其定義、作用以及目的。
而針對交叉提示問題的求解歸屬于協(xié)同任務(wù)規(guī)劃范疇,其算法有很多,如:雙邊組合拍賣算法[2]、模糊控制算法[3]、利用禁忌表進(jìn)行求解[4-5]、粒子群算法[6]、博弈論算法[7]。
本文介紹了交叉提示的基本理論,并深入研究交叉提示技術(shù)在探測、跟蹤目標(biāo)和目標(biāo)交接中的應(yīng)用,而后提出一種基于閃電搜索(LSA)的交叉提示算法,并將該算法和基于人工蜂群算法以及博弈論算法進(jìn)行了對比。
1 傳感器交叉提示理論基礎(chǔ)
1.1 交叉提示網(wǎng)絡(luò)
傳感器網(wǎng)絡(luò),是由部署在多維空間中通過各種通信協(xié)議連接而成,可以實現(xiàn)探測目標(biāo)的各種類傳感器組成的系統(tǒng)。傳感器網(wǎng)絡(luò)節(jié)點經(jīng)常使用光電傳感器,通常有衛(wèi)星、飛機(jī)、艦艇或地面雷達(dá)等,而網(wǎng)絡(luò)邊緣由能夠?qū)崿F(xiàn)互相通信的傳感器節(jié)點相連完成[8-9]。
傳感器組網(wǎng)多數(shù)分為三級,分別是以天基傳感器(高段)、空基傳感器(中段)以及地(海)基傳感器(低段)三級組成的網(wǎng)絡(luò)。天基傳感器主要有導(dǎo)航衛(wèi)星(北斗衛(wèi)星導(dǎo)航系統(tǒng))、通信衛(wèi)星以及國際尖端技術(shù)的紅外預(yù)警衛(wèi)星等;空基傳感器有各種類預(yù)警機(jī),以及近年新興起的臨空飛行器等;地(海)基傳感器主要由各種類雷達(dá)系統(tǒng)組成[9]。
對于傳感器的部署,不可能是所有探測區(qū)域“一碗水端平”同等部署,而是采取重要區(qū)域重點部署的策略,如重要城市、軍事基地等重要地域周邊應(yīng)當(dāng)部署較多雷達(dá),同時雷達(dá)之間發(fā)生交叉提示的頻率也應(yīng)較高,以此避免傳感器資源的浪費。綜上所述,傳感器網(wǎng)絡(luò)顯然是具有社區(qū)性的,所以建立的傳感器網(wǎng)絡(luò)模型應(yīng)當(dāng)是基于社區(qū)網(wǎng)絡(luò)模型的,如圖1所示。
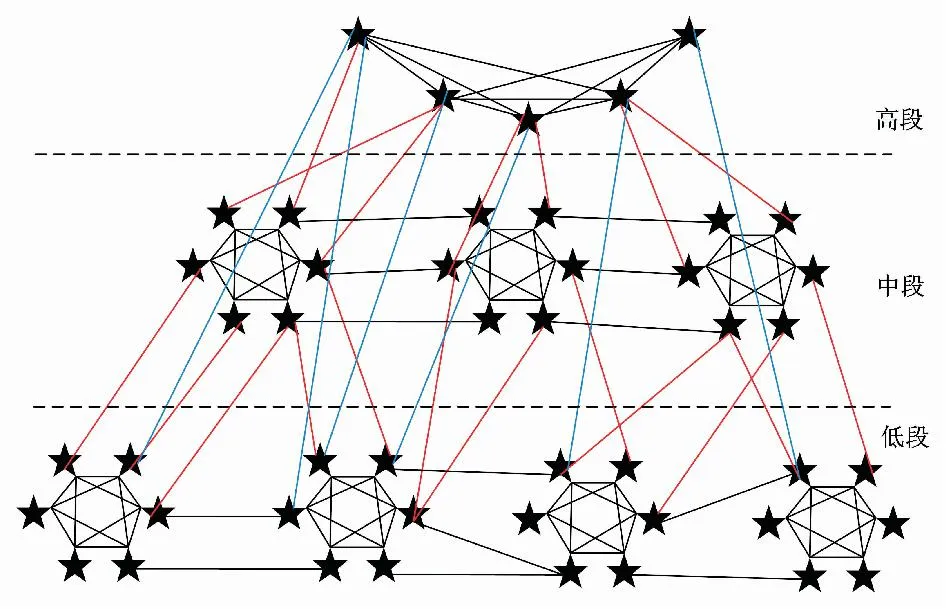
圖1 傳感器網(wǎng)絡(luò)結(jié)構(gòu)Fig.1 Sensor network structure
各種類的傳感器有不同的特點、部署成本以及實際作戰(zhàn)環(huán)境,在重要地域周邊部署地(海)基雷達(dá),中、高段部署的傳感器主要目的是增大傳感器網(wǎng)絡(luò)探測覆蓋面積,從而對目標(biāo)實現(xiàn)快速探測以及“無縫”交接目標(biāo)。
1.2 基于MAT的交叉提示結(jié)構(gòu)
從地理位置上看,傳感器在實際作戰(zhàn)環(huán)境的分布同時具有“集中性”和“分散性”,前者指的是傳感器均以信息融合中心為載體集中分布,并且受所屬信息融合中心的控制管理[10];后者指的是傳感器分布在立體空間中的不同段,占據(jù)的空間范圍大,通過內(nèi)部信息網(wǎng)連接成龐大的立體探測網(wǎng)絡(luò)。基于多Agent代理技術(shù)的傳感器分布式管理結(jié)構(gòu)如圖2所示。
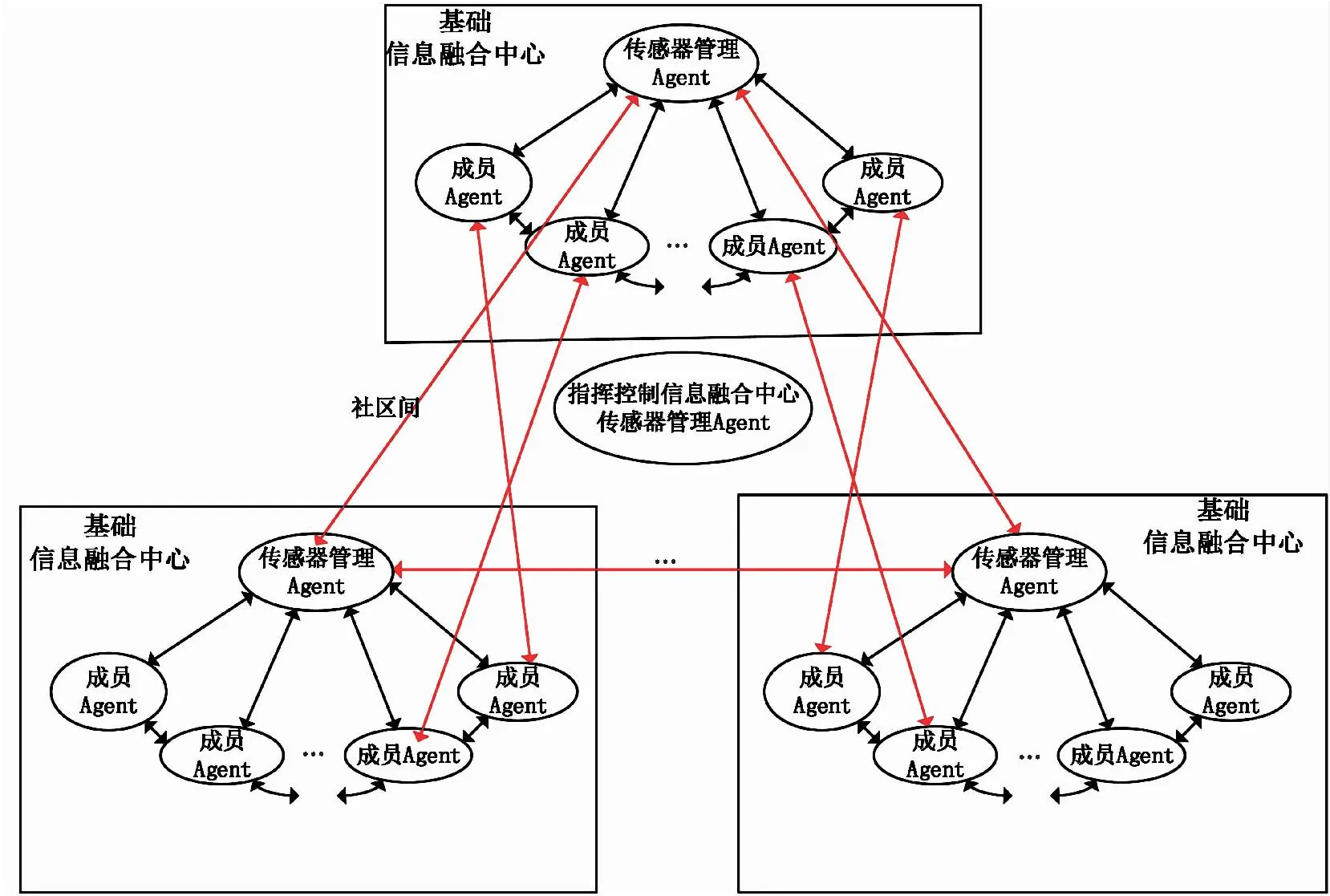
圖2 多傳感器分布式管理結(jié)構(gòu)示意圖Fig.2 Schematic diagram of multi-sensor distributed management structure
圖2中,信息融合中心采用了兩種Agent:傳感器管理Agent與成員Agent。前者多由信息融合中心的指揮控制系統(tǒng)充當(dāng),主要有兩個“責(zé)任”:1) 根據(jù)指揮控制信息融合中心傳感器管理的指令和其他基礎(chǔ)信息融合中心的傳感器管理Agent進(jìn)行交互,實現(xiàn)各個基礎(chǔ)信息融合中心之間的任務(wù)協(xié)同與交叉提示;2) 對各個基礎(chǔ)信息融合中心的傳感器成員進(jìn)行指令分配,同時監(jiān)控所屬傳感器成員對指令的執(zhí)行以及作為不同基礎(chǔ)信息融合中心的個體傳感器進(jìn)行交互的中間“橋梁”。后者可以是單個傳感器,也可以是傳感器組合,主要是執(zhí)行傳感器管理Agent分配的指令,它們之間也可以通過通信與協(xié)調(diào)實現(xiàn)基礎(chǔ)信息融合中心內(nèi)的任務(wù)協(xié)同與交叉提示。信息融合及處理模型如圖3所示。
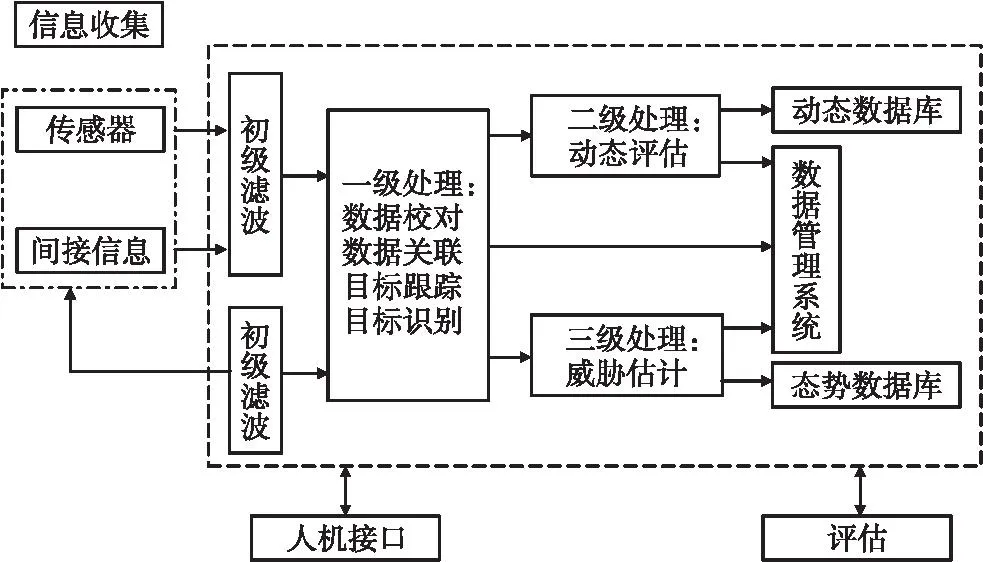
圖3 信息融合處理模型Fig.3 Information fusion processing model
1.3 交叉提示內(nèi)容以及條件
自動觸發(fā)交叉提示[11]的內(nèi)容是關(guān)于目標(biāo)綜合信息等內(nèi)容,主要包括:1) 執(zhí)行的具體任務(wù);2) 發(fā)出提示信息的傳感器位置信息;3) 傳感器探測到的可疑目標(biāo)或區(qū)域信息。
而傳感器自動開始進(jìn)行提示,需要滿足交叉提示的條件,交叉提示的條件描述了傳感器網(wǎng)絡(luò)什么時機(jī)需要各傳感器進(jìn)行提示,可以概括為,當(dāng)網(wǎng)絡(luò)中的某一傳感器捕捉到了潛在目標(biāo)時,信息融合中心會根據(jù)目前所獲得的目標(biāo)信息進(jìn)行綜合研判:1) 是否滿足信息融合中心先前設(shè)置的期望性能指標(biāo);2) 當(dāng)前傳感器對目標(biāo)的探測、目標(biāo)的跟蹤還在不在范圍內(nèi),從而確定需不需要對該目標(biāo)進(jìn)行交接,交接需滿足① 該目標(biāo)將脫離當(dāng)前傳感器探測范圍,② 出現(xiàn)優(yōu)先級更高的目標(biāo)在當(dāng)前傳感器探測范圍內(nèi)且該傳感器同時只能探測、跟蹤一個目標(biāo),③ 當(dāng)前傳感器出現(xiàn)故障警告或者受到敵方武器威脅即不能正常工作時。
綜上所述,如果信息量沒有達(dá)到期望性能指標(biāo)以及目標(biāo)交接條件時,各傳感器之間就需要交叉提示以此獲取更詳盡的信息去正確探測目標(biāo)、提高識別準(zhǔn)確度以及跟蹤精度。
2 建立交叉提示模型
2.1 傳感器網(wǎng)絡(luò)效能模型
假設(shè)某網(wǎng)絡(luò)中一共有m個傳感器{a1,a2,a3,…,am},同時對n個目標(biāo){b1,b2,b3,…,bn}進(jìn)行探測,傳感器與目標(biāo)配對矩陣為P,元素為pij,
若pij=1,那么傳感器ai取得的效能為
eij=αrij+βcij,
(1)
式(1)中,α、β為加權(quán)系數(shù),且滿足α+β=1;eij為ai的效能;rij為探測收益,當(dāng)傳感器對目標(biāo)檢測時,rij為探測概率rdij,當(dāng)傳感器對目標(biāo)進(jìn)行跟蹤時,rij為跟蹤精確度rlij;cij為能耗。
2.2 檢測模型
當(dāng)網(wǎng)絡(luò)中的傳感器探測到目標(biāo)后,會先對目標(biāo)進(jìn)行檢測。假設(shè)同時有M個傳感器對目標(biāo)nj的協(xié)同檢測概率為
rdkj=1-(1-r1j)·(1-r2j)·…·(1-rMj),
(1≤k≤M)。
(2)
此時,傳感器對目標(biāo)的探測概率為M個傳感器同一時間對目標(biāo)的協(xié)同探測概率rdkj。
對目標(biāo)進(jìn)行探測時,網(wǎng)絡(luò)對目標(biāo)的探測概率Pt≥Δ時(Δ為門限值取0.85),那么就認(rèn)為網(wǎng)絡(luò)可以準(zhǔn)確地判別目標(biāo)的敵我身份。
2.3 跟蹤模型
當(dāng)完成對目標(biāo)的探測后,若判定為具有攻擊性的目標(biāo),則網(wǎng)絡(luò)將會繼續(xù)對該目標(biāo)進(jìn)行跟蹤從而進(jìn)一步判斷是否為虛假目標(biāo),若是虛假目標(biāo)則網(wǎng)絡(luò)會放棄對該目標(biāo)的繼續(xù)跟蹤。本文中定義跟蹤精度為位置精度衰減因子的負(fù)數(shù),公式為
(3)
式(3)中,tr為求跡運(yùn)算符號,P(k|k)為k時刻的目標(biāo)估計誤差協(xié)方差矩陣(covariance matrix)。
對目標(biāo)nj跟蹤時,精度計算模型應(yīng)當(dāng)分為兩種情況:1) 僅有一個傳感器對目標(biāo)進(jìn)行跟蹤;2) 多個傳感器同時對目標(biāo)進(jìn)行跟蹤。本文中是以多傳感器為基礎(chǔ),因此討論第2種情況。
多個傳感器同時對目標(biāo)進(jìn)行跟蹤即多傳感器信息融合問題。假設(shè)有M個傳感器在同一時間對目標(biāo)nj進(jìn)行跟蹤,給出各個傳感器對此目標(biāo)的測量方程:
(4)
設(shè)
(5)
則有
Ck=TXk+Zk。
(6)
而在跟蹤目標(biāo)中,使用拓展Kalman濾波方式估計目標(biāo)狀態(tài)[12],傳感器對目標(biāo)的探測概率為rdkj,則修正Kalman濾波迭代式為
(7)
這時,傳感器ai對目標(biāo)nj的跟蹤精度為M個傳感器同時探測目標(biāo)的協(xié)同跟蹤精度rlkj。
2.4 交接模型
目標(biāo)在移動過程中,一旦要脫離某傳感器探測區(qū)域時,就會請求“任務(wù)提示”,提醒其他的傳感器繼續(xù)對該目標(biāo)進(jìn)行探測,從而達(dá)到交接目標(biāo)的目的。
假設(shè)在某k時刻,目標(biāo)和ax的距離為dx(k),和ay的距離為dy(k);在k+1時刻,目標(biāo)和ax的距離為dx(k+1),和ay的距離為dy(k+1)。
ax對目標(biāo)進(jìn)行探測時,滿足式(8),將會請求“任務(wù)提示”。
(8)
ay滿足式(9)時,表示有接替ax從而繼續(xù)對目標(biāo)進(jìn)行探測的能力。
(9)
式(9)中,Ax,Ay分別為ax,ay的探測區(qū)域。
3 交叉提示算法
3.1 算法原理以及建立算法模型
3.1.1放電體的梯級先導(dǎo)傳播
在閃電搜索算法[13-14]中,放電體定義為:源于雷電自然現(xiàn)象,并基于梯級先導(dǎo)傳播機(jī)制的閃電快速粒子。其概念與PSO算法中的“粒子”和GSA算法中的“個體”等類似。
假設(shè)每個放電體包含一個梯級先導(dǎo)和一個獨有通道,則有表1所示對應(yīng)關(guān)系。
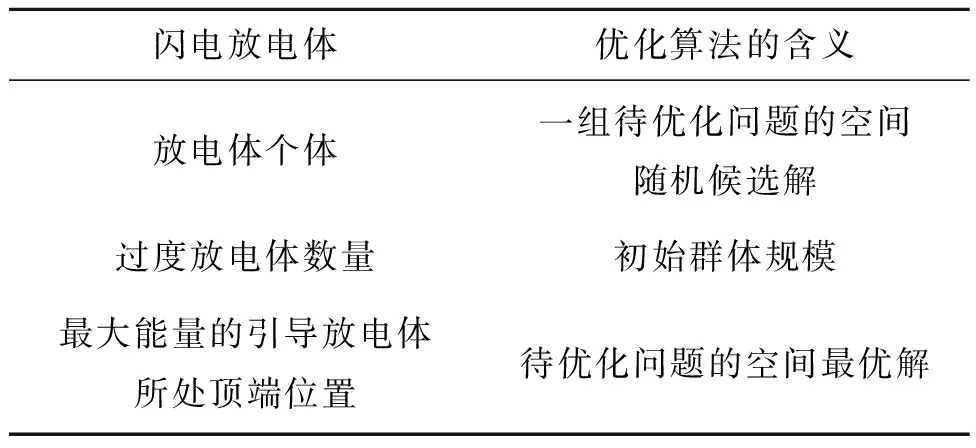
表1 閃電放電體與優(yōu)化算法的對應(yīng)關(guān)系Tab.1 Correspondence between lightning discharge body and optimization algorithm
3.1.2放電體特性
通常條件下,穿過大氣的放電體與空氣中的分子與原子發(fā)生彈性碰撞時將會失去其動能,放電體的速度可表示為
(10)
式(10)中,vp和v0分別表示當(dāng)前速度和初速度,c和Fi分別表示光速和恒定電離速率,m和s分別表示放電體質(zhì)量和放電體所行進(jìn)的路徑長度。
式(10)清晰地表示了速度是梯級先導(dǎo)頂端位置能量和放電體質(zhì)量的函數(shù),即質(zhì)量小或行進(jìn)路徑長時,放電體基本上不會電離或者擁有探測大空間的潛質(zhì),只能夠電離或者開發(fā)附近的空間。綜上,LSA算法可以通過使用梯級先導(dǎo)的相對能量來控制算法的探測與開發(fā)能力。
梯級先導(dǎo)者還有一個重要特性是分岔,即同時出現(xiàn)兩個對稱的分支。在此期間創(chuàng)建的任意通道都會使得放電體的數(shù)量增加一個,因而就會增加群體的大小。LSA算法中可以通過兩種方法實現(xiàn)分岔。
1) 創(chuàng)建對稱通道,使用式(11)實現(xiàn)兩個相對的放電體碰撞。
(11)
2) 第二類的分岔中,由于在多次傳播試驗后最不成功的引導(dǎo)者能量會再分配,即可以假定通道出現(xiàn)在成功的梯級先導(dǎo)者頂端。通道時間定義為允許的最大試驗次數(shù),這樣就可以實現(xiàn)重新分配不成功的先導(dǎo)者。這種情況下,階梯先導(dǎo)的種群規(guī)模不會增加。
兩種分岔方式中,本文采取第2種分岔方式。
3.1.3建模以及梯級先導(dǎo)移動

(12)
式(12)中,xt為可提供候選解即梯級先導(dǎo)si的初始頂端能量Esi的隨機(jī)數(shù),c和d分別為解空間的邊界范圍。
(13)

(14)
式(14)中,exprand是一個指數(shù)隨機(jī)數(shù)。

3) 引導(dǎo)放電體。利用具有形狀參數(shù)μ和尺度參數(shù)σ的標(biāo)準(zhǔn)正態(tài)分布生成的隨機(jī)數(shù)進(jìn)行建模,它的正態(tài)概率密度函數(shù)f(xL)表述為
(15)
式(15)表述了隨機(jī)生成的放電體可以從形狀參數(shù)定義的當(dāng)前位置搜索所有方向。這個放電體還擁有由尺度參數(shù)定義的開發(fā)能力。在LSA中,用于引導(dǎo)放電體pL的μL被視為pL,且尺度參數(shù)σL隨著它的朝向地球方向的進(jìn)程或找到最好的解從而以指數(shù)規(guī)律減小。這樣,pL在t+1次迭代中位置可寫為
(16)

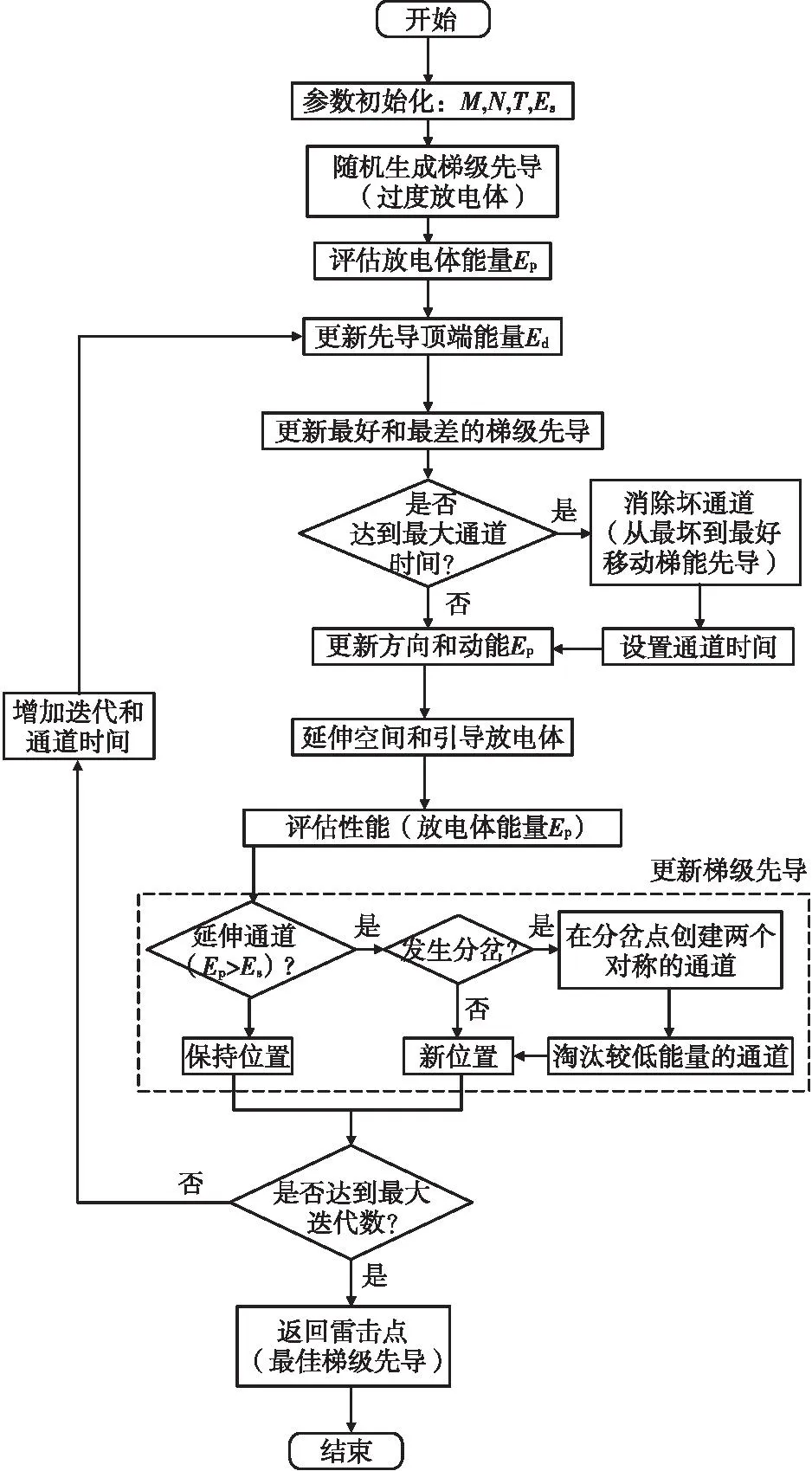
圖4 閃電搜索算法的實現(xiàn)流程圖Fig.4 Flow chart of lightning search algorithm implementation
4 仿真實驗
假設(shè)我方軍事基地坐標(biāo)為(1 900,1 900),網(wǎng)絡(luò)中的傳感器特性在表2呈現(xiàn)。若某一時刻網(wǎng)絡(luò)中出現(xiàn)了5個目標(biāo),分別為敵方偵察機(jī)、預(yù)警機(jī)、轟炸機(jī)、殲擊機(jī)以及虛假目標(biāo),初始位置分別是(100,550),(450,450),(650,200),(700,150),速度分別為720,800,1 100,2 000 km/h,速度方向都是由初始位置直接指向我方軍事基地,位置示意如圖5所示。
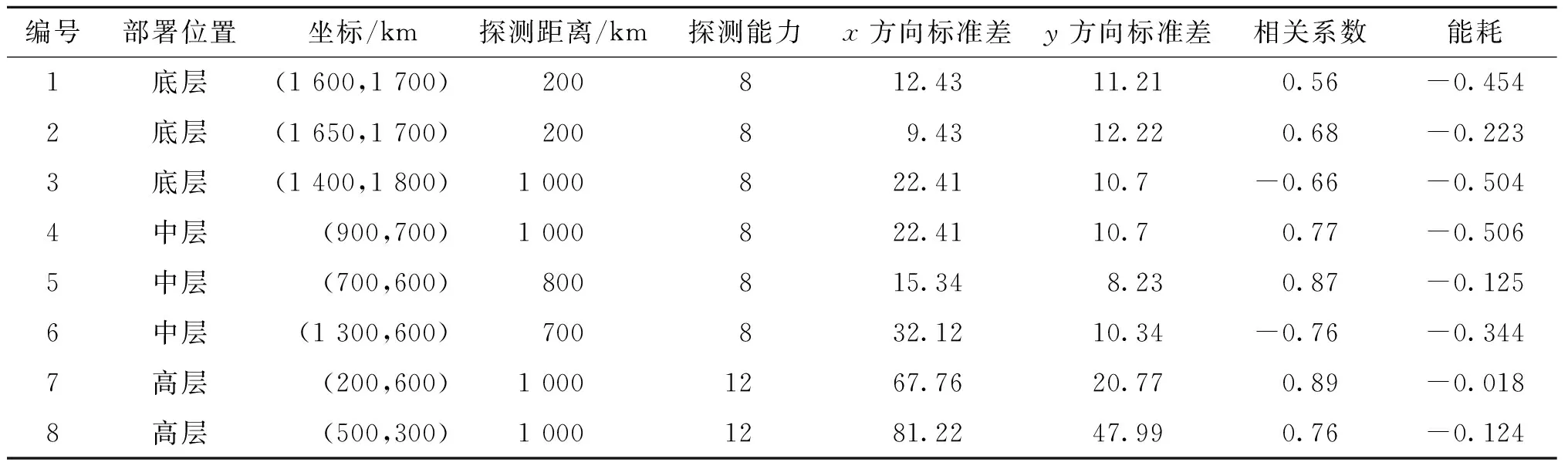
表2 傳感器特性以及部署坐標(biāo)Tab.2 Sensor characteristics and deployment coordinates
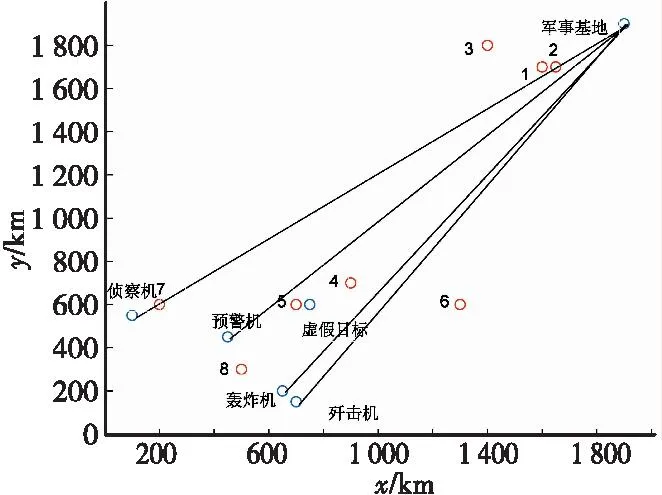
圖5 敵我作戰(zhàn)態(tài)勢Fig.5 Combat situation between us and enemy
各傳感器對不同目標(biāo)的探測概率為
(17)
式(17)中,第i行第j列元素rdij是傳感器ai對目標(biāo)bj的探測概率。
4.1 面向探測目標(biāo)的交叉提示
當(dāng)k=0時探測情況如表3,將分布式和集中式算法[15]進(jìn)行對比,分布式算法使用并行計算方法,求解的速度快,但是單個傳感器只能掌握局部信息,解的質(zhì)量比集中式求解要低,所以本文采用的算法同時對比分布式算法求解速度和集中式算法的求解質(zhì)量[16]。網(wǎng)絡(luò)對每個目標(biāo)建立聯(lián)盟分別探測,同時本文將閃電搜索算法、人工蜂群算法以及博弈論算法求解探測聯(lián)盟方案[17],進(jìn)行了100次Monte Carlo實驗,網(wǎng)絡(luò)效能與迭代次數(shù)的變化關(guān)系如圖6所示。
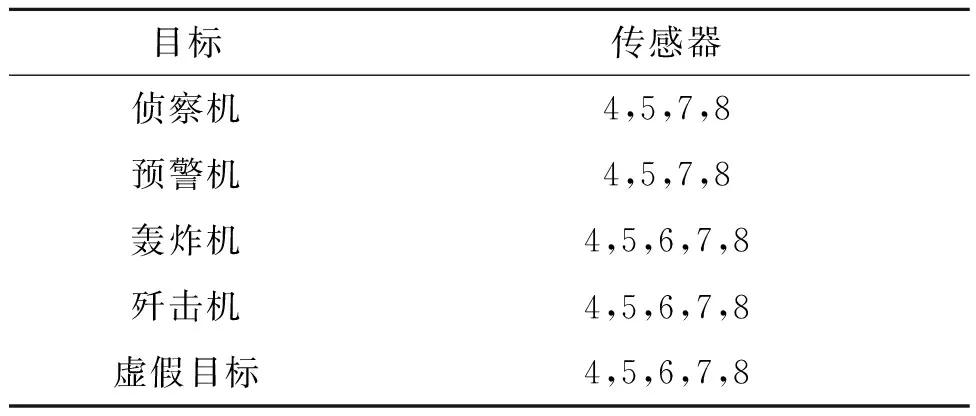
表3 傳感器分配情況Tab.3 Sensor distribution
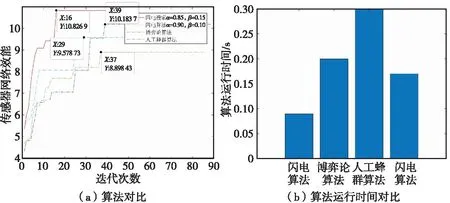
圖6 面向探測目標(biāo)任務(wù)的算法對比Fig.6 Comparison of algorithms for target detection task
由圖6可知,當(dāng)α=0.85,β=0.15時,閃電算法與博弈論算法和人工蜂群算法相比,閃電算法求解質(zhì)量比較高,同時收斂速度最快。探測聯(lián)盟求解如表4,網(wǎng)絡(luò)效能為10.826 9。
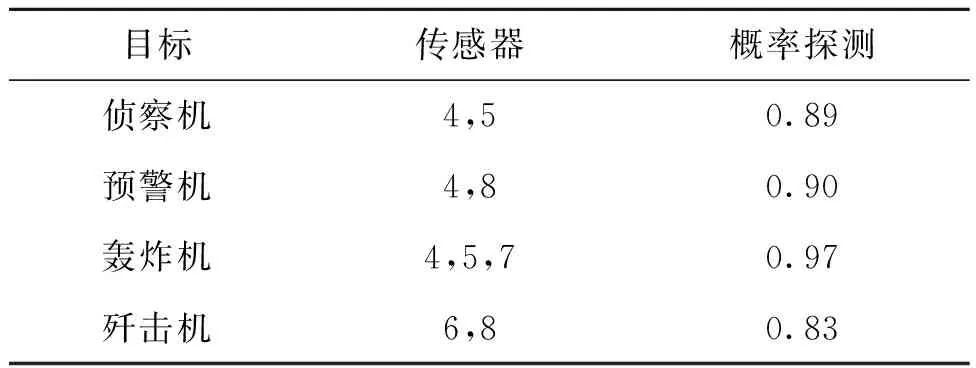
表4 傳感器分配情況Tab.4 Sensor distribution
當(dāng)α=0.90,β=0.10時,閃電算法與博弈論算法和人工蜂群算法相比,閃電算法求解質(zhì)量比較高,同時收斂速度最快。探測聯(lián)盟求解如表5,網(wǎng)絡(luò)效能為9.578 7。
表5 傳感器分配情況Tab.5 Sensor distribution
將兩種情況對比后,可知通過適當(dāng)減小α和增大β,可以提高傳感器網(wǎng)絡(luò)效能同時探測概率沒有較大變化。
4.2 面向跟蹤目標(biāo)的交叉提示
假設(shè)目標(biāo)飛行0.1 h即k=0.1,此時對所有的目標(biāo)探測完畢即虛假目標(biāo)已被放棄,從而進(jìn)入跟蹤狀態(tài),傳感器探測情況如表6。
表6 傳感器分配情況Tab.6 Sensor distribution
網(wǎng)絡(luò)對每個目標(biāo)組建探測聯(lián)盟進(jìn)行跟蹤,本文分別用閃電算法、人工蜂群算法以及博弈論算法求解聯(lián)盟方案,進(jìn)行100次Monte Carlo實驗,網(wǎng)絡(luò)效能與迭代次數(shù)的變化關(guān)系如圖7所示。
圖7 面向跟蹤目標(biāo)的算法對比Fig.7 Comparison of target-oriented algorithms
由圖7可知,當(dāng)α=0.85,β=0.15時,3種算法對比,閃電算法求解質(zhì)量高且收斂速度最快,能更好地適應(yīng)實際作戰(zhàn)環(huán)境。
當(dāng)α=0.85,β=0.15時,閃電算法穩(wěn)定后,跟蹤敵方偵察機(jī)的傳感器是a5,a7,跟蹤精度為-22.68;跟蹤敵方預(yù)警機(jī)的傳感器為a4,a5,跟蹤精度為-11.43;跟蹤敵方轟炸機(jī)的傳感器為a6,a7,跟蹤精度為-7.08;跟蹤敵方殲擊機(jī)的傳感器為a5,a6,a8,跟蹤精度為-9.89。傳感器網(wǎng)絡(luò)效能為-11.542 2。
當(dāng)α=0.90,β=0.10時,算法穩(wěn)定后,跟蹤敵方偵察機(jī)的傳感器是a5,a7,a8,跟蹤精度為-8.78;跟蹤敵方預(yù)警機(jī)的傳感器為a4,a5,a7,跟蹤精度為-7.43;跟蹤敵方轟炸機(jī)的傳感器為a4,a6,a7,跟蹤精度為-7.08;跟蹤敵方殲擊機(jī)的傳感器為a4,a5,a6,a8,跟蹤精度為-6.19。傳感器網(wǎng)絡(luò)效能為-10.864 6。
兩種情況相比較后得到,可通過適當(dāng)減小α和增大β提高對目標(biāo)探測的精度。
4.3 面向目標(biāo)交接的交叉提示
當(dāng)k=1 h,敵方偵察機(jī)的位置為(820,1 270),跟蹤該目標(biāo)的傳感器a7,經(jīng)過1 h,a7與目標(biāo)的距離為912 km,符合交接條件,此時a7發(fā)出請求,而滿足情況的傳感器為a4,a5,a6。
計算網(wǎng)絡(luò)效能,綜上取α=0.85,β=0.15,對該傳感器同樣進(jìn)行100次Monte Carlo實驗,效能與迭代次數(shù)關(guān)系如圖8。
圖8 面向目標(biāo)交接的傳感器分配Fig.8 Sensor assignment for target handover
算法穩(wěn)定后,對敵方偵察機(jī)進(jìn)行跟蹤的是a5傳感器,網(wǎng)絡(luò)效能為-3.9,精度為-33.23,最終方案決定后,傳感器a7不再對敵方偵察機(jī)進(jìn)行跟蹤,從而實現(xiàn)目標(biāo)交接。
5 結(jié)論
本文針對幾類典型飛機(jī)目標(biāo)的探測問題,提出了基于閃電搜索的多傳感器交叉提示算法。首先建立了基于Agent技術(shù)的MAT的交叉提示結(jié)構(gòu),提出有社區(qū)性的傳感器網(wǎng)絡(luò)結(jié)構(gòu),給出交叉提示發(fā)生的條件以及網(wǎng)絡(luò)效能評價函數(shù),探究交叉提示在目標(biāo)探測、跟蹤以及交接的應(yīng)用,設(shè)計了基于LSA的多傳感器交叉提示算法,通過仿真實驗驗證閃電算法性能優(yōu)于博弈論算法和人工蟻群算法,有較好的求解質(zhì)量以及較快的收斂速度。
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32