考慮無人機飛行時間的能耗與數據量聯合優化
2024-01-18 16:52:54朱江,肖津
計算機工程與應用 2024年1期
關鍵詞:優化
朱 江,肖 津
重慶郵電大學 通信與信息工程學院,重慶 400065
隨著第五代移動通信技術(fifth generation,5G)的規模化應用,各種類型的新興業務和應用深刻改變了人類社會的生產和生活方式[1-2]。為了滿足更多樣的應用場景,針對5G以及未來的第6代移動通信(sixth generation,6G)系統,業界和學術界展開了以實現“空天地海”一體化為目標的相關研究。在未來“空天地海”一體化的網絡中,UAV作為空基網絡層面的組成部分,在一體化網絡中起著重要的作用[3]。
在UAV 的眾多應用場景中,一項重要的研究分支就是在物聯網場景下進行數據采集。物聯網節點具有資源受限的特點,因此目前的相關研究是在能耗、時間、頻譜等資源的受限條件下,對通信時延、數據量、能效等進行優化。具體而言,有一部分研究是在資源受限條件下實現系統數據量最大化,包括:文獻[4]通過聯合優化用戶關聯、UAV 軌跡和每個節點的上傳功率解決了一個在UAV能耗約束和用戶服務要求下的最大化系統數據量問題。文獻[5]考慮單UAV在時間約束下從多個傳感器節點收集數據的場景,通過聯合設計UAV 三維軌道和傳輸調度來最大化所有節點最小數據收集率。文獻[6]提出了一種通過啟用非正交多址技術的UAV輔助數據收集(non-orthgonal multiple access enabled UAV assisted data collection protocol,NUDC)協議,通過聯合UAV位置、傳感器分組和功率控制進行優化,以最大化傳感器網絡的總速率;還有一部分研究是以降低節點或者UAV的能耗為目標:文獻[7]考慮運用UAV進行數據采集,聯合傳感節點任務調度和UAV軌跡,以最小化傳感器節點能耗進行優化。文獻[8]解決了在數據采集和UAV 移動距離約束下,以最大化傳感器在數據傳輸后的最小剩余能量為目標的優化問題。文獻[9]為了克服UAV 續航問題,提出了一種利用用戶端主動緩存來支持UAV 通信的方案,通過對文件緩存和文件檢索成本進行權衡,聯合文件緩存策略、UAV軌跡和通信調度進行優化,以最小化UAV能耗。文獻[10]通過優化UAV位置與傳感器上傳功率,解決了在傳感器節點能耗有限時最小化UAV 能耗的問題;此外,還有部分文獻針對UAV與節點的能耗進行權衡:文獻[11]考慮在傳感器網絡中存在能夠收集其他節點數據的簇頭,因此UAV 進行數據采集時要與簇頭進行通信,為了求解該模型下系統能耗最小問題,文章提出了一種深度強化學習算法,通過仿真證明了方法的可靠性。文獻[12]考慮多UAV場景,將UAV的推進能耗和運行成本定義為空中成本,將傳感器網絡傳輸能耗定義為地面成本,通過將問題分解為子問題來求解空中與地面成本的權衡問題,子問題采用凸逼近與交替優化求解。
上述研究資源雖然受限,但整體而言資源是能夠保證數據采集任務完成的,研究的重點是提高資源使用效率問題。但在某些節點密集部署的場景下,不能保證所有任務能夠完成,例如:在戰場中,要在有限時間內收集盡可能多的敵方數據;在海量機器類型通信場景下,在有限時間內盡可能多地收集傳感器節點的數據等。為了應對這些通信場景,相關研究需要進一步深入。
出于上述分析,本文考慮一個有時間約束的數據采集系統,網絡中的每個節點有一定量的數據,UAV要在有限時間內進行數據采集。該問題復雜程度高且高度非凸,為求解此問題,提出了一種初始軌跡優化和二次軌跡優化的兩階段優化方法。在初始軌跡優化階段提出基于貪心算法和禁忌搜索算法的優化方案,實現節點選擇,確定采集順序。在二次軌跡優化階段,將初始化軌跡離散化,針對非凸問題采用逐次凸逼近算法,在每次迭代的過程中更新UAV軌跡與傳輸調度參數。通過迭代找到符合條件的次優解。
1 系統模型
考慮如圖1所示的無線通信場景,一架旋翼UAV被派遣到一片區域進行數據采集,并在有限時間內完成數據采集任務。在這片區域內節點數量大,因此UAV 只能為部分節點提供數據采集服務。考慮在實際的應用中,UAV 采集的數據量與采集消耗的系統能耗是評估UAV 采集系統的重要指標。因此,本文方案的目標是在兼顧UAV 飛行能耗與節點傳輸能耗的前提下,通過軌跡規劃和傳輸調度,盡力而為地提供數據采集服務。該區域有K個節點,節點集合用U={u1,u2,…,uK} 表示,設{k|k=1,2,…,K},則第k個節點的二維坐標表示為wk∈R2。假設UAV在固定高度H飛行。假設模型規定任務完成時間為T。定義UAV在某一時刻投影在二維平面上的位置為{q(t)|q(t)∈R2,0 ≤t≤T}。定義UAV的最大速度為vmax。因此,在任意時刻t∈[0,T],UAV與第k個節點之間的距離可以表示為
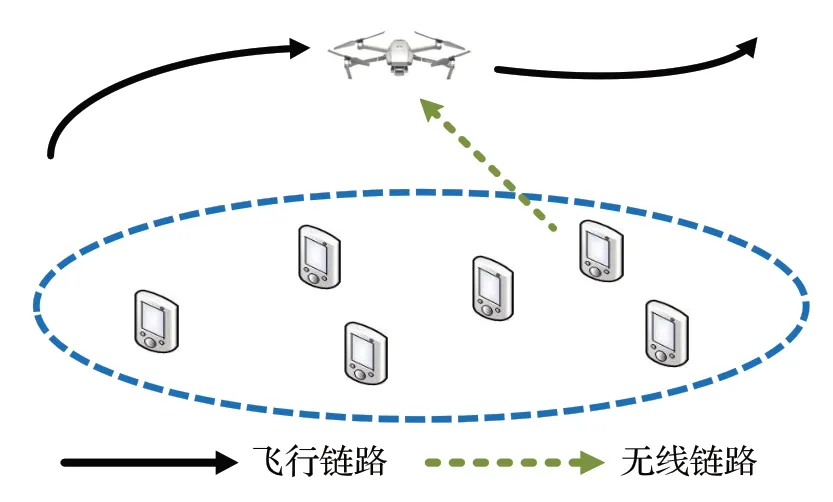
圖1 UAV數據采集模型Fig.1 UAV data collection model
1.1 通信模型
關于UAV到節點的信道模型,根據文獻[7]可知:在時刻t∈[0,T],UAV 與節點k之間的信道系數為hk(t)=其中βk(t)與ρk(t)分別表示大尺度衰落與小尺度衰落系數。大尺度衰落受路徑損耗與陰影效應影響會影響額定的傳輸速率。小尺度衰落通常由多徑效應引起,會導致瞬時信道容量低于預定義的傳輸速率,導致系統中斷。大尺度衰落主要考慮路徑損耗,主要與通信距離相關,大尺度衰落模型可以表示為:
式中,β0表示參考的單位距離信道增益,此增益值在任務時間T內不變,||q(t)-wk||表示某時刻UAV與節點距離的二范數,下文中出現的||·||均指二范數。假設在任意時刻,UAV 的小尺度衰落為獨立同分布的隨機變量。那么,香農傳輸速率為:
B表示系統的帶寬;表示節點傳輸功率,假設功率固定為σ2表示的是加性高斯白噪聲功率;Γ>1 表示系統實際接收信號與理論接收信號的信噪比差異。考慮到小尺度衰落可能會導致系統中斷,通過中斷概率pk(t)可以推導出累積分布函數F(·)。
假設UAV容忍的最大中斷概率為ε。F-1(·)是F(·)的反函數。因此節點k的上行傳輸速率可以表示為:
因為UAV 飛行時信道系數hk(t)隨時間變化,且要與多個節點通信,采用時分多址傳輸協議。設傳輸調度相關參數{αk(t)|αk(t)∈{0,1}}表示在t時刻節點k是否進行通信。當αk(t)=0 時表示在t時刻,UAV 不與節點k通信。另一種情況表示進行通信。根據條件在t時刻所有用戶傳輸調度參數的和小于等于1:
在總時間約束T內,其總數據傳輸量應該滿足:
其中,Dk表示采集節點的有效數據量,設在有限時間內采集的節點有效數據和為D;Sk表示需要從節點k采集的數據量,不失一般性,假設對于任意用戶Sk=S。式(6)表明總數據傳輸量大于等于其數據量。對應的任一節點傳輸能耗可表示為:
1.2 UAV飛行模型
在UAV 通信系統中,除了數據傳輸產生的能耗還有UAV 飛行產生的能耗。相比于固定翼UAV,旋翼UAV 具有高精度以及可懸停的特性,使用旋翼UAV 進行數據采集可以應對更為復雜的場景。旋翼UAV的功率隨速度變化的相關公式由文獻[13]給出。出于問題復雜度的考慮,只考慮速度對功率的影響。UAV 飛行功率可以表示為:
公式中的三項分別為:旋翼型阻功率,旋翼誘導功率以及機體阻力功率。式中常數P0與Pi為懸停狀態下葉型功率和誘導功率;Utip為槳葉葉尖速度;v0為UAV懸停時轉子誘導速度;d0為機身阻力比;s為轉子堅固性;ρ為空氣密度;A為轉子盤面面積。
定義UAV 飛行總能耗為Efly,可以將UAV 飛行能耗表示為:
其中,v(t)=q′(t)為UAV的瞬時速度。
2 聯合優化問題描述
基于上述相關通信模型的構建,UAV 數據采集系統中多目標聯合優化問題可以表示為:
為了權衡不同量綱的參數,讓目標各項落在同一數量級,設置W1、W2、W3為各項對目標函數的加權,具體的數值設置在結果分析中介紹;參數qinitial與qfinal屬于R2,表示UAV 投影初始點與終止點。約束C1 描述節點數據傳輸量滿足數據量要求;約束C2描述UAV是否采集某個節點的數據,即Dk=0 表示UAV 不采集k節點數據,Dk=S表示采集;C3 與C4 為傳輸調度參數的約束;C5為飛行速度約束;C6為飛行軌跡約束。
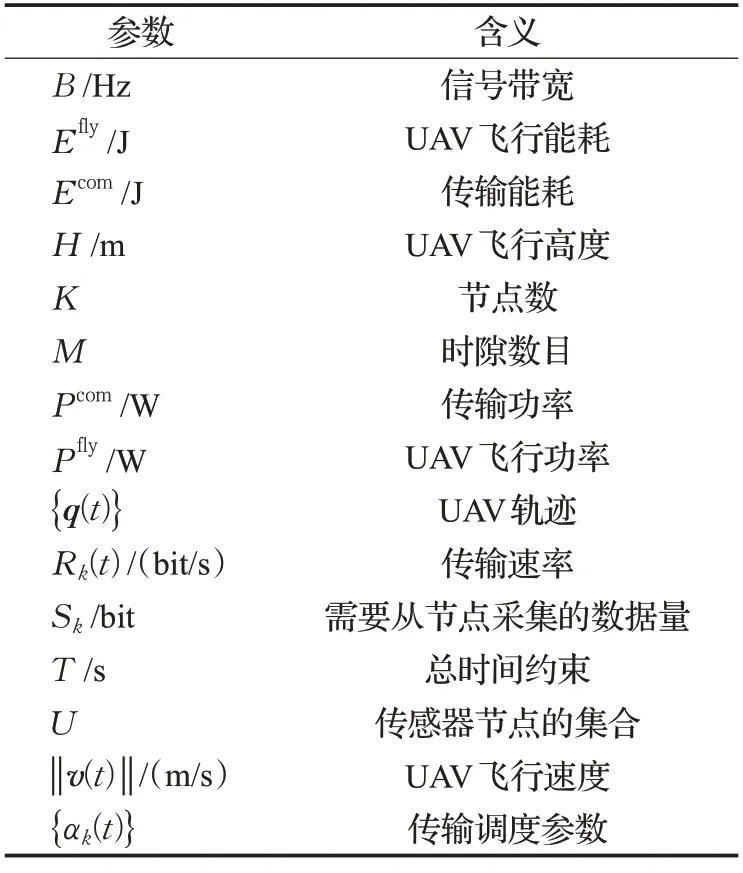
表1 參數及其定義Table 1 Notation and definition
3 問題求解
為了求解非凸問題P1,將其分解為兩個步驟來優化。第一步為UAV 初始軌跡優化,為降低飛行軌跡優化的復雜度,考慮一種飛行懸停方案,基于貪心算法和禁忌搜索算法,找到一條可行初始軌跡,并且確定從哪些節點處采集數據。第二步為二次軌跡優化,在第一步的基礎上,進一步對目標函數進行優化。具體而言,通過將軌跡離散將初始問題轉化為離散變量問題,針對該非凸問題采用逐次凸逼近技術優化UAV軌跡和傳輸調度參數,求出優化問題的次優解。
3.1 UAV飛行模型
在UAV 數據采集的軌跡優化方案中,一種較為簡單的方法是將模型簡化成一個在節點間飛行,在節點投影點上懸停傳輸的模型[4]。具體到本文的應用場景就是:UAV從一個投影坐標點通過直線飛行,飛到另一個節點投影點懸停,在懸停時UAV 才會采集對應節點的數據,采集完后飛到下一個節點投影點繼續采集,在時間耗盡前,綜合考慮飛行、傳輸能耗以及有效數據量來采集數據。在這種模式下,懸停與傳輸對應,即懸停可以代表UAV進行數據采集,飛行代表不采集數據,那么傳輸調度參數就可以被忽略。通過初始軌跡優化可以確定UAV 數據采集的節點選擇,同時優化得到的解也可作為二次軌跡優化的初始解。
通過上述分析可得,問題P1 的初始解通過求解P2獲得。
約束C1 為數據量約束;約束C2 為速度約束;約束C3 為軌跡約束;約束C4 為時間約束。在該階段W1、W2、W3的設置對軌跡有一定影響,W1設置較大、W2設置較小或W3設置較小時,目標函數中數據量權重增加,即收益增加,飛行能耗和傳輸能耗權重減小,即成本減少,UAV 會傾向采集更多節點數據。相反條件下,UAV采集節點數更少。求解問題P2可以得到一條從初始點到終點,在節點間飛行,在節點投影點懸停傳輸的最優軌跡。本質上來看,這個問題被轉換成了一個特殊旅行商問題[14]。在常見旅行商問題中遍歷的節點數目是固定的,而此問題要格外考慮訪問節點數。求解該問題的一個簡單的算法是窮舉法,窮舉能服務的節點數、服務的節點、節點的排序方法,最終找出一個收益最高的訪問軌跡。窮舉法能得到最優解,但其時間復雜度非常高,約為O(K!),在K較大時難以求解。因此,初始軌跡優化考慮一種改進貪心算法來求解P2的有效次優解,具體算法如下所示。
算法1初始軌跡優化算法
算法1 采用的啟發式算法是禁忌搜索算法[15],具體過程如下所示。由于不同的啟發式算法在時間復雜度上不會有數量級上的差異,所以這里使用其他的啟發式算法也可行。考慮時間復雜度,執行次數較多的步驟5包含三層循環,時間復雜度為O(K3)。另一個執行次數較多的是步驟11 使用的啟發式算法,復雜度為O(K3Max_GEN)[16]。式中Max_GEN為最大迭代次數。顯然,所提算法的時間復雜度遠遠小于窮舉法。
禁忌搜索算法更新軌跡:
3.2 二次軌跡優化
初始軌跡優化考慮的是一個飛行,懸停傳輸模型。嚴格來說,這個模型本身就并非最優。考慮將問題分解為兩步來解決,能夠降低算法復雜度,得到可行的次優解。二次軌跡優化考慮將初始軌跡優化得到的解做進一步的優化。
對連續問題進行求解的有效方法是將連續問題離散化。考慮將時間離散,設δ為時隙長度,設M為時隙的數量,有T=Mδ。假設在每個時隙內信道保持不變,不同時隙間可變。為了簡化符號表達,定義{q[m]|q[m]=q(mδ),m=0,1,…,M}表示UAV 在mδ時刻的位置。同理,定義v[m]表示UAV 在m時隙內的平均飛行速度,且滿足:
對于傳輸參數,定義{αp[m]|αp[m]=αp(mδ),m=1,2,…,M}表示在第m個時隙UAV 是否采集p節點數據。在參數離散化之后,目標函數可以寫成以下形式:
與問題P1 類似,問題P3 中:約束C1 表示每個通信的節點的數據傳輸量要滿足要求,約束C2描述UAV是否采集某個節點的數據,約束C3 與C4 為傳輸率的約束,C5 為速度約束,C6 為軌跡約束。在問題P3 中采集數據的節點確定,P1 優化目標中有效數據傳輸量D為定值可以忽略。約束C1為等式約束,為了求解,對其進行放縮,令
定理1對問題P3 中約束C1 左側進行放縮不會影響新問題P4與原問題P3的等價性質。
證畢。
為了求解P3,利用松弛函數法和凸逼近(successive convex approximation,SCA)迭代求出其次優解,即通過迭代,在每次迭代的過程中優化松弛函數法放縮得到的凸優化問題,在多次迭代后條件收斂,得到非凸問題P3 的解。對于整數變量傳輸調度參數,將該變量松弛,即0 ≤αp[m]≤1。約束C1 是一個非凸約束,其中Rp[m]為非凸項,對其用一階泰勒展開,則其在第l次迭代時滿足式(15)。
在飛行能耗相關的函數中第二項誘導功率也是非凸的,引入松弛變量,設:
與約束C1類似,通過放縮松弛變量,讓收斂時能保證松弛變量與原參數嚴格相等。
上式左側為凸,對右側進行一階泰勒展開,有:
將上述所示的公式變化帶入問題P3,可以得到如下問題P4:
可以證明如果問題P4 的約束滿足要求,那么問題P3的約束也能夠滿足,即P4的可行域是P3可行域的子集。通過SCA算法迭代,更新局部點,可以獲得P3的有效次優解。但P4 的約束C1 左側依然存在變量耦合問題,為了解耦不妨考慮下式。
在第l次迭代時,通過一階泰勒展開,可以得到其下界。
那么可以得到以下不等式:
將上式放縮代入P4,可以得到第l次迭代時的優化問題P5:
通過上述推導可知,問題P5是一個凸問題,可以使用現有的凸優化方法工具箱(如CVX)進行優化。使用初始軌跡優化得到的初始軌跡,可以通過SCA迭代,在每次迭代的過程中優化問題P5,在多次迭代后條件收斂,得到非凸問題P3 的解。采用SCA 技術進行迭代,多次迭代后收斂的解即為目標的解。具體算法總結如下:
算法2基于SCA求解P3的算法
4 結果分析
考慮一個節點數K=18的系統,隨機分布在2 000 m×2 000 m 的區域。設置初始點與終點分別為:qinitial=[-1 000 m,0 m]T、qfinal=[1 000 m,0 m]T。設UAV 飛行高度H=100 m,通信帶寬B=1 MHz,最大飛行速度vmax=50 m/s。設置節點傳輸功率Pcom=0.1 W,時隙長度δ=0.5 s 。單位距離參考的信道概率增益β0=-60 dB,加性高斯白噪聲功率σ2=-110 dBm,系統實際調制方案高斯噪聲與理論值的信噪比差Γ=7 dB,UAV容忍的最大中斷概率ε=10-2,信道萊斯衰落因子Kc=10,其累計分布函數,其中Qmarcum-Q為Marcum Q 函數,以上參數設置主要參考文獻[7]。設置參數W1、W2、W3的目的是讓不同量綱的表達式歸一化,讓它們處于同一數量級,讓不同項對目標函數影響相當。具體而言,設置W1=1、W2=103、W3=107,參數設置參考文獻[12]。
圖2 展示了對于四種不同數據量,即S=1 Mbit、S=5 Mbit、S=10 Mbit 和S=20 Mbit 時,初始軌跡優化得到的直線飛行懸停傳輸軌跡和二次優化通過逐次凸逼近得到的軌跡對比圖。文章設置數據量范圍最大為20 Mbit,是因為此范圍足夠描述規律。通過對比可以發現,在初始軌跡優化的軌跡中,UAV要在節點的投影點、節點的正上方懸停進行通信。二次軌跡優化的軌跡中,UAV不會懸停進行通信,而是在節點投影點附近進行通信。這種現象展示了二次優化對飛行能耗和傳輸能耗的權衡。具體來說,當UAV 在投影點傳輸時,UAV 的傳輸能耗最小,但此刻飛行的路徑是最長的。通過優化飛行軌跡可以減少UAV 飛行能耗,提高一定傳輸能耗,達到能耗之間的平衡。對比不同數據量下的軌跡可知,隨著數據量需求的提高,二次優化的軌跡越加接近初始軌跡優化的軌跡且采集的節點數減少。二次優化軌跡趨近于節點是因為隨著數據量需求的提高,能耗的權衡更傾向于傳輸能耗。采集的節點數減少是因為:數據量需求的提高導致采集每個節點消耗的時間增加。且由于時間約束,導致在相同時間約束下,UAV能夠采集的節點數減少。

圖2 初始軌跡優化與二次軌跡優化對比Fig.2 Comparison of initial trajectory optimization and secondary trajectory optimization
固定每個節點數據量S=10 Mbit。圖3 展示了初始軌跡優化和二次軌跡優化UAV飛行速度隨時間變化的曲線圖。圖4 展示了UAV 飛行功率隨時間變化曲線。對比圖2 軌跡可知:在二次軌跡優化的軌跡中,UAV 不會懸停進行通信,而是在節點投影點附近減速飛行進行通信。初始軌跡優化懸停通信由于UAV與節點更近,需要消耗的數據采集時間更少。在二次軌跡優化中,UAV 不會懸停,不需要飛到節點正上方通信,而傾向于在靠近節點附近時進行通信,因此通信時間更久,但飛行的距離減少,產生的飛行能耗下降。對比圖3和圖4 可以發現,在初始軌跡優化,UAV 以最大速度進行飛行時要消耗的能量非常大,而在二次軌跡優化中UAV在兩節點間飛行時消耗的能量遠遠小于最大速度飛行時的能耗。即,通過二次軌跡優化可以提高飛行速度的自由度,可以更好地解決直線飛行,懸停傳輸方案中由高速飛行帶來的較大的能量消耗。
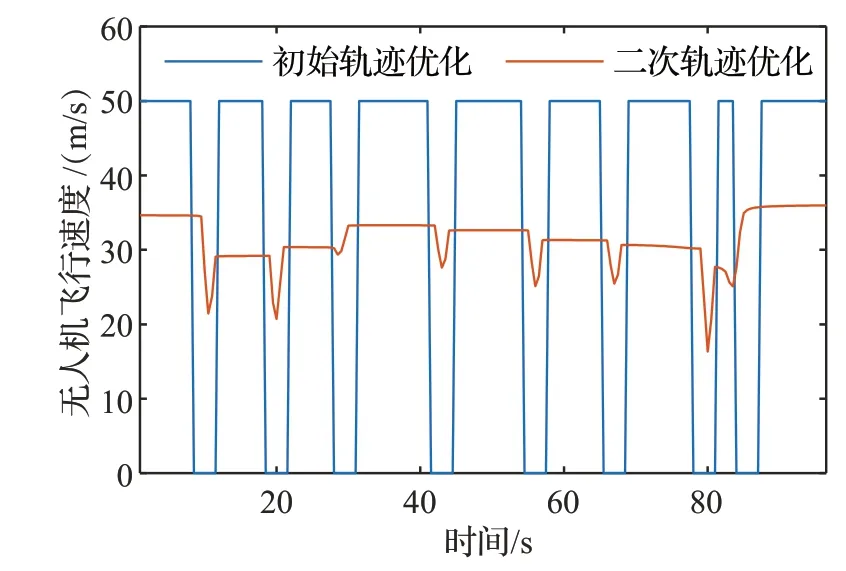
圖3 UAV飛行速度隨時間變化曲線Fig.3 UAV flight speed curve with time
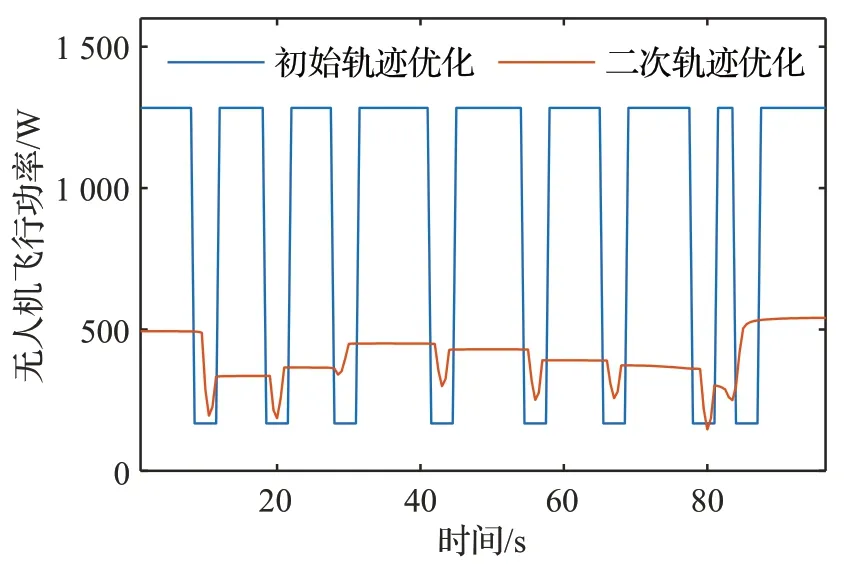
圖4 UAV飛行功率隨時間變化曲線Fig.4 UAV flight power curve with time
圖5展示了UAV在不同數據量下UAV與各節點間傳輸調度參數α隨時間變化的對比圖,不同顏色的函數對應不同節點。從圖中可以看出隨著數據量的提高,UAV 采集一個節點的時間變長,同時UAV 采集的節點數減少。對比圖2中不同數據量之間的軌跡可知:在數據量較大時,UAV 與節點之間通信的時間更長,因此,在總時間給定的前提下,UAV 在節點之間飛行的時間更少,能夠采集的節點數也更少。
為了對比初始軌跡優化中采用的改進貪心算法的效率,考慮一種較為簡單的求解節點數的方法——改進隨機算法。具體來說,假設初始軌跡只包含初始點和終點,從服務一個節點開始,在所有節點中隨機選擇k個節點,然后通過啟發式算法計算得到選擇這k個節點時,目標函數值最大的情況。將這個步驟重復多次,從中選擇服務k個節點時目標函數值最大的情況。為了對比分析,該方案的參數設置和改進貪心算法的方案相同。
固定每個節點數據量S=10 Mbit。如圖6所示,對比初始軌跡優化中改進貪心算法對比改進隨機算法在不同服務節點數下對應時間范圍(時間范圍是指UAV采集k個節點時不同算法消耗的最短時間)。圖7為在相同時間約束下改進貪心算法與改進隨機算法服務總數據量對比。如圖2所示,區域內的節點總數為18。觀察圖6 可知,采集的節點在4 到13 之間時,改進貪心算法消耗的時間更少,即在相同時間下改進貪心算法能夠服務的節點數更多,采集的有效數據量更大。這點也可以從圖7中得到證明。從排列組合的角度分析,因為選擇k個節點時,可能的情況為組合數為當選擇節點數k為K的一半時組合數非常大,即改進隨機算法選到總消耗時間最小節點組合的可能性更低。而改進貪心算法每次選擇的節點都是當前看來最好的情況,即收斂到總消耗時間最小節點組合的可能性更高。
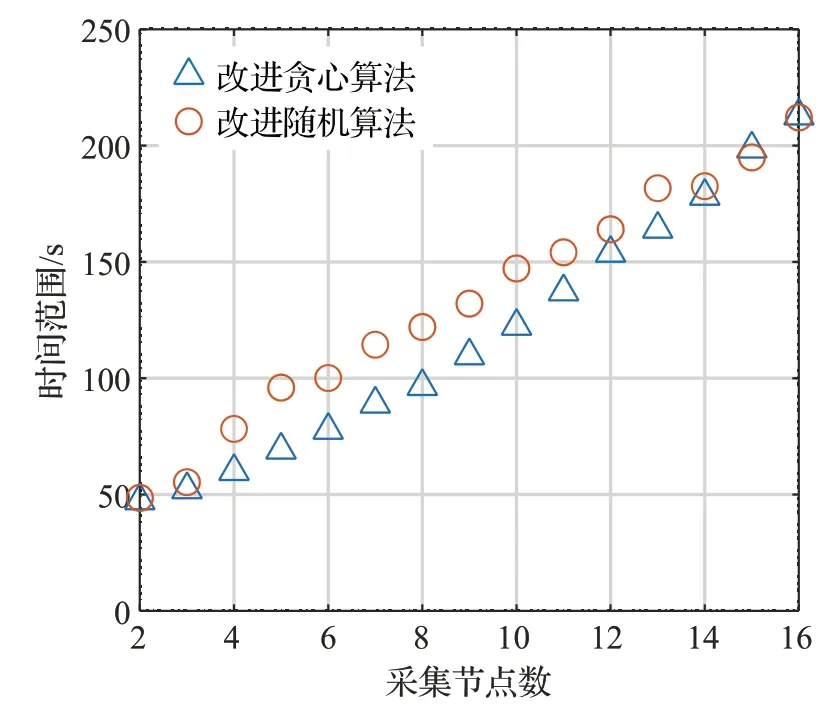
圖6 不同算法數據采集消耗時間Fig.6 Time consumption of data collection by different algorithms

圖7 不同算法采集數據量Fig.7 Amount of data collected by different algorithms
圖8 為初始軌跡優化、二次軌跡優化、直線飛行與懸停通信方案飛行能耗對比。懸停通信方案是指:在初始軌跡優化相同的條件下,UAV 懸停在節點的幾何中心進行通信,飛行時間與聯合優化方案相同。直線飛行方案是指:在初始軌跡優化相同的條件下,UAV從初始點到終點勻速飛行,飛行時間與聯合優化方案相同。從圖8中可以觀察到,懸停通信與直線飛行的能耗在不同數據量下接近但不完全相同。這種現象是因為,在初始軌跡優化時,由于只給定了時間約束,整個UAV采集的實際時間會略小于約束時間。為了進行對照,圖中同一組數據量不同方案時間相同,不同數據量時間可能略有差異。直線飛行能耗最小是因為其飛行速度接近飛行功率最小的速度。初始軌跡優化能耗最大是因為其飛到每個節點上方采集數據,飛行路徑非常大,且在飛行過程中飛行速度一直保持最大速度,綜合來看飛行能耗非常高。初始軌跡優化與二次軌跡優化飛行能耗隨數據量要求提高而減小是因為數據量提高,UAV 能夠采集的節點數減少,飛行的路徑也在一定程度上減少,因此飛行能耗也會有一定程度的減少。對比初始軌跡優化與二次軌跡優化的結果可知,通過二次軌跡優化,UAV的飛行能耗較明顯地降低。

圖8 不同方案飛行能耗Fig.8 Flight energy consumption of different schemes
圖9 為四種方案傳輸能耗對比。從圖9 中可以看出,初始軌跡優化、二次軌跡優化的結果相比于對比方案能耗小很多,且二次軌跡優化中消耗的傳輸能耗相較于初始軌跡變化不明顯。傳輸能耗較小是由于上二次軌跡優化軌跡進行通信時都是在節點附近,而對比方案中UAV與節點距離較大。二次軌跡優化相較初始軌跡傳輸能耗只有小幅度增加是因為UAV是在高度H=100 m飛行,在二次軌跡優化中通信距離的變化相較飛行高度較小。綜合來看,(1)懸停通信和直線飛行方案屬于極端情況,因此能耗平衡較差;(2)相比于其他方案,二次軌跡優化的能耗平衡最好,即二次軌跡優化算法能夠以小幅度增加傳輸能耗為代價換取較大的飛行能耗的優化。

圖9 不同方案傳輸能耗Fig.9 Transmission energy consumption of different schemes
為了對比下層優化中UAV飛行能耗和傳輸能耗不同權值下的仿真結果,以上文中的W2、W3為基準,將目標函數權值改為:λW2、(1-λ)W3,設每個節點數據量S=10 Mbit,仿真結果如圖10所示。從圖10中可以看出當λ=0 時,優化方程只考慮傳輸能耗,此時,UAV 軌跡傾向于初始軌跡,因為,在初始軌跡下,UAV在節點正上方進行數據采集,傳輸能耗最小。隨著λ的增加,目標函數中飛行能耗的權重增加,那么通過優化,UAV的軌跡會更傾向飛行能耗更少的軌跡,即直線飛行的軌跡。

圖10 不同權值比例下傳輸能耗與飛行能耗對比Fig.10 Comparison of transmission energy consumption and flight energy consumption under different weight ratios
5 結語
針對時間約束下的UAV 數據采集模型,提出系統數據量、節點上行傳輸總能耗和UAV 飛行能耗的聯合優化方案,通過該方案找到了這個多目標優化問題的次優解。由于所求優化問題非凸,該算法考慮將問題分解為兩個步驟來優化。第一步為UAV 初始軌跡優化,為了降低問題復雜度,考慮一種飛行懸停方案,并基于貪心算法和禁忌搜索算法,找到一條可行初始軌跡。第二步為二次軌跡優化,目標是進一步對軌跡進行優化,因此先將軌跡離散化,將連續問題轉換為離散問題,然后采用逐次凸逼近技術求解非凸問題并得到次優解。數值結果表明,所提出方法能夠更好地做到UAV 飛行能耗、節點傳輸能耗、通信數據量的權衡。后期,將考慮采用多UAV完成數據采集任務。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45