基于模型的推進系統故障識別及建模方法
2024-01-18 00:00:00戚亞群金平彭祺擘張海聯蔡國飆
系統工程與電子技術 2024年12期

關鍵詞:基于模型的系統工程;故障識別;故障建模;可靠性分析;安全性分析;推進系統
中圖分類號:V434.1 文獻標志碼:A DOI:10.12305/j.issn.1001506X.2024.12.15
0引言
載人登月任務規模龐大并融合了大量高新技術,任務風險高,為保障航天員的生命安全,必須保證各個系統的安全性與可靠性。各系統功能邏輯、結構設計和容錯設計復雜,潛在故障多且直接影響任務成敗乃至航天員生命安全。在設計初期全面識別復雜系統潛在故障,對后續開展可靠性分析并提出改進措施、降低風險、保障航天員生命安全具有重要意義。
傳統故障模式識別主要以故障模式及影響分析(faultmodeandeffectsanalysis,FMEA)和故障樹分析(faulttreeanalysis,FTA)為主。FMEA 采用自下而上的分析方法,從底層單元的失效模式出發,逐級分析故障產生原因及其影響,從而識別系統潛在故障并分析其風險程度[1]。FTA則從頂層不期望發生的頂事件出發,從上至下分析可能導致頂事件的故障原因[2]。FMEA與FTA 得到的分析結果可以相互補充,用于后續的可靠性、安全性分析以及控制措施的制定。上述方法經過多年的研究與實踐,已被廣泛應用于航天領域中[36]。然而,對于功能結構十分復雜、新技術高度集成的載人登月任務,上述故障模式識別方法的不足日益明顯[78]:第一,FMEA 所需的底層單元故障以及FTA中的頂事件一般根據已有的故障統計結果或分析人員的經驗進行確定,對于新研復雜系統,易因認知的局限性造成故障識別不全面;第二,分析過程過于依賴個人經驗與能力,缺乏客觀、系統性的分析手段;第三,不同層級系統在不同設計階段產生大量文檔,導致信息分散且可追溯性差,故障識別過程繁雜且設計狀態改變后難以保證設計模型與故障模式識別所用模型的一致性。這些局限性極易導致對新型、新研載人飛船推進系統的故障識別不全面、不準確,影響任務的順利實施,甚至危害航天員的生命安全。
隨著基于模型的系統工程(model-basedsystemsengi-neering,MBSE)理論及其系統建模語言(system modelinglanguage,SysML)的快速發展,MBSE 在復雜系統工程中得到了廣泛的應用[915]。近年來,將可靠性分析與MBSE相融合的基于模型的可靠性分析方法應運而生,該方法通過建立一個系統功能和可靠性分析的綜合模型,保證可靠性分析系統與實際系統的一致性、繼承性和準確性,得到了國內外研究機構的廣泛關注[1626]。
故障模式全面識別與建模是基于模型的可靠性分析的基礎。借助MBSE中規范化、標準化、全維度的系統模型,同步開展復雜系統故障模式識別能有效解決現有故障識別方法中存在的故障識別不全面、過于依賴個人經驗與能力、分析模型不一致等問題,有助于全面識別潛在故障。基于該思想,美國國家航空航天局(NationalAeronauticsandSpaceAdministration,NASA)的噴氣推進實驗室(JetPropulsionLaboratory,JPL)利用統一建模語言(unifiedmodelinglanguage,UML)的擴展機制建立了故障分析基礎模型[17,27],開發相應的SysML 插件用于提取系統故障樹,并應用于載人飛船環境控制與生命保障分系統的設計中[2829]。Mhenni等[3031]利用SysML的擴展機制將系統故障集成到系統模型,并利用可擴展標記語言(extensiblemarkuplanguage,XML)元數據交換技術,根據SysML 建立的活動圖、內部模塊圖等實現FMEA 條目和故障樹的自動生成。為了進一步加強安全性和可靠性分析與SysML模型的融合,對象管理組織(object managementgroup,OMG)成立了專家組,于2021 年1 月正式發布了基于SysML 的風險分析與評估建模語言(riskanalysisandassessmentmodelinglanguage,RAAML),為基于模型的故障識別與建模提供了重要支撐[32]。
在國內,胡云鵬等[33]利用SysML的擴展機制建立載人登月任務故障模式分析的基礎模型,在此基礎上,建立基于活動圖或功能分解的故障模式識別方法,并提出面向載人登月的安全性和可靠性分析方法[34]。種婧宜等[8]以SysML為基礎,提出通信衛星的故障模式分析方法。
上述研究多針對任務級、頂層系統級的故障模式,利用SysML建立的功能模型展開故障識別。對于推進系統這類底層分系統,在研制過程中除了功能分析,還涉及到具體的性能和結構設計,故障來源包括部/組件的功能喪失或偏差、性能偏差以及結構失效等方面,失效模式眾多且復雜。上述文獻僅依靠描述系統功能的模型進行故障識別,難以全面識別推進系統潛在故障。因此,需針對推進系統這類底層分系統建立更為適用的故障識別與建模方法,實現潛在故障的全面識別,為系統的故障分析、可靠性分析及上層系統的故障分析提供基礎。
本文以載人登月任務新一代載人飛船推進系統為研究對象,開展基于模型的故障模式分析與建模方法研究。利用正常工作狀態時全維度的系統模型,按照功能完備、性能完好、結構完整3個維度的要求,從功能、性能、結構3個方面開展潛在故障模式識別,并建立相應的故障基礎模型,用于描述故障模式及其傳遞關系,為后續系統及任務的故障分析、可靠性分析、安全性分析提供基礎。
1方法概述
本文提出的基于模型的故障識別與建模方法與基于MBSE的系統正向化設計過程同步開展,以正常工作狀態下的系統模型為依據,利用擴展后的SysML建立故障模型,實現系統模型與故障信息的統一表達,可有效避免系統設計模型與故障分析、可靠性分析、安全性分析模型不一致的問題。
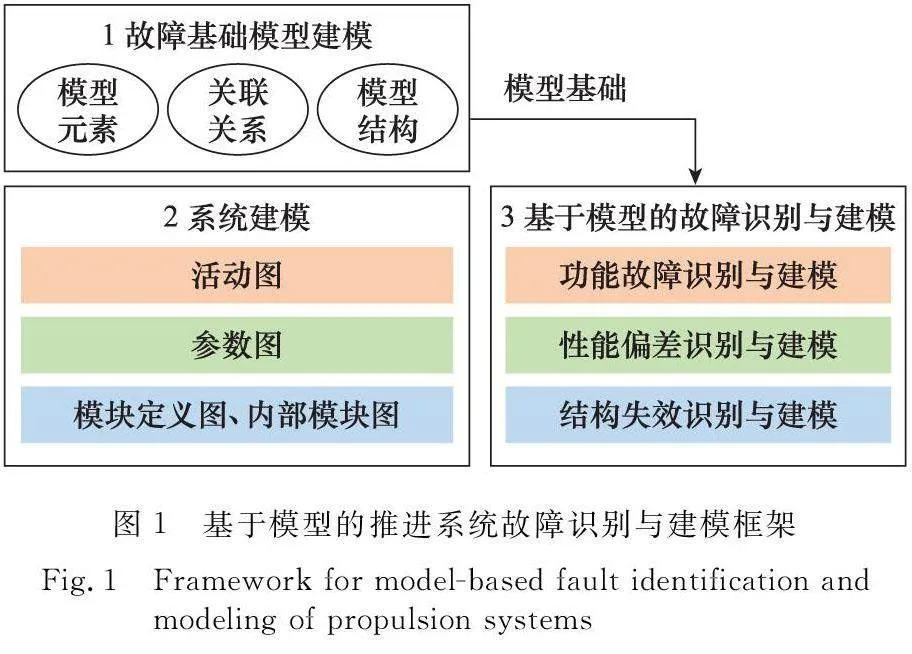
該方法包括基于SysML擴展機制的故障基礎模型建模、基于SysML的系統正常工作狀態下的系統模型建模以及故障模式識別與建模3部分內容,如圖1所示。
其中,第一部分基于SysML 擴展機制的故障基礎模型建模參考RAMML,根據推進系統故障模式特點及可靠性、安全性分析的需求建立相應的故障基礎模型,包括模型元素、關聯關系以及模型結構等,為故障模式識別和建模提供模型基礎。第二部分正常工作狀態下的系統模型采用SysML進行建模,包括描述系統功能的活動圖、狀態機圖、時序圖,描述系統參數與性能的參數圖以及描述系統組成與接口關系的模塊定義圖、內部模塊圖等。上述模型為基于模型的故障模式識別提供分析依據。第三部分基于模型的故障識別與建模則以故障基礎模型為模型基礎,以系統正向化設計中建立的系統模型為分析基礎,利用所提出的方法從功能、性能、結構3個維度全面識別故障并進行建模。
2故障基礎模型建模
故障基礎模型是故障建模的基礎。與推進系統模型同源且符合推進系統故障特點及可靠性、安全性分析需求的專用故障基礎模型對后續開展故障分析、可靠性分析、安全性分析具有重要意義。
MBSE采用SysML進行系統建模,但該語言仍有一定的局限性,無法對推進系統故障分析及可靠性分析、安全性分析的知識、概念等進行明確的描述與定義。為了實現系統模型與故障模型、可靠性分析、安全性分析的統一表達,利用SysML的可擴展性,并參考OMG 發布的RAAML標準規范,建立符合推進系統故障模式特點以及后續可靠性分析、安全性分析需要的故障基礎模型。
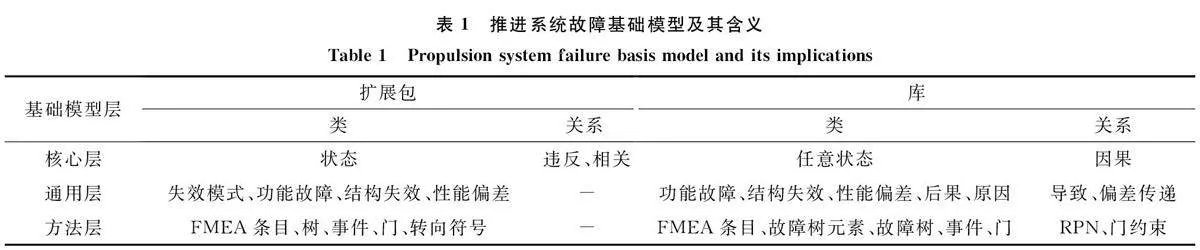
為了便于模型的管理和后續的改進,本文所建立的故障基礎模型延用RAAML的3層基本結構,包括核心層、通用層以及方法層。每一層結構由擴展包和庫組成,擴展包中定義建模所需的構造型和關聯關系,利用SysML中的擴展圖進行定義;庫則根據用戶需求,對所需的類型及關聯關系進行自定義。
核心層作為通用層和方法層的基礎,對故障建模和可靠性分析中的通用概念的元素和關系進行定義,如擴展包中的“狀態”,“違反”關系、“相關”關系等。
通用層是核心層的擴展,對故障識別及后續可靠性分析、安全性分析所必須的一般元素與概念進行定義。包括“失效模式”“原因”“后果”。在該層中,針對功能、性能和結構3 個層面的故障模式特點和故障傳播特點,對現有RAAML 進行適應性擴展及刪減。將失效模式細化為描述功能故障、結構失效和性能偏差的3種故障模式。同時,根據故障間傳遞邏輯的不同,建立“導致”和“偏差傳遞”兩類故障傳遞關系。“導致”用于描述通過邏輯關系和邏輯模型確定的故障傳遞過程,如管路焊縫裂紋導致推進劑泄漏。“偏差傳遞”則描述因工作參數變化導致的性能偏差傳遞,如推進劑流量偏差引起的推力偏差。
在方法層中,分別針對FMEA 和FTA 所需的元素建立擴展包和庫。包括用于FMEA 分析的FMEA分析條目、用于風險系數(riskprioritynumber,RPN)計算的約束條件,用于FTA 分析的樹、事件、門等。
所建立的故障基礎模型名稱及其含義如表1所示。
3基于犛狔狊犕犔的系統建模
利用SysML對推進系統的需求、結構、行為及參數進行建模是推進系統開展正向化設計的重要組成,也是進行基于模型的推進系統故障識別的依據。
本文中正常工作狀態下的推進系統建模基于Magic-grid框架,從推進系統的需求分析出發,依據需求開展功能分析和架構設計,通過建立需求追溯關系判斷設計是否合理。具體建模步驟可參考文獻[35]。本節著重介紹用于表征系統功能、性能、結構等模型的建模過程,為后文從功能、性能、結構3 個維度進行故障模式識別提供模型基礎。
3.1活動圖建模
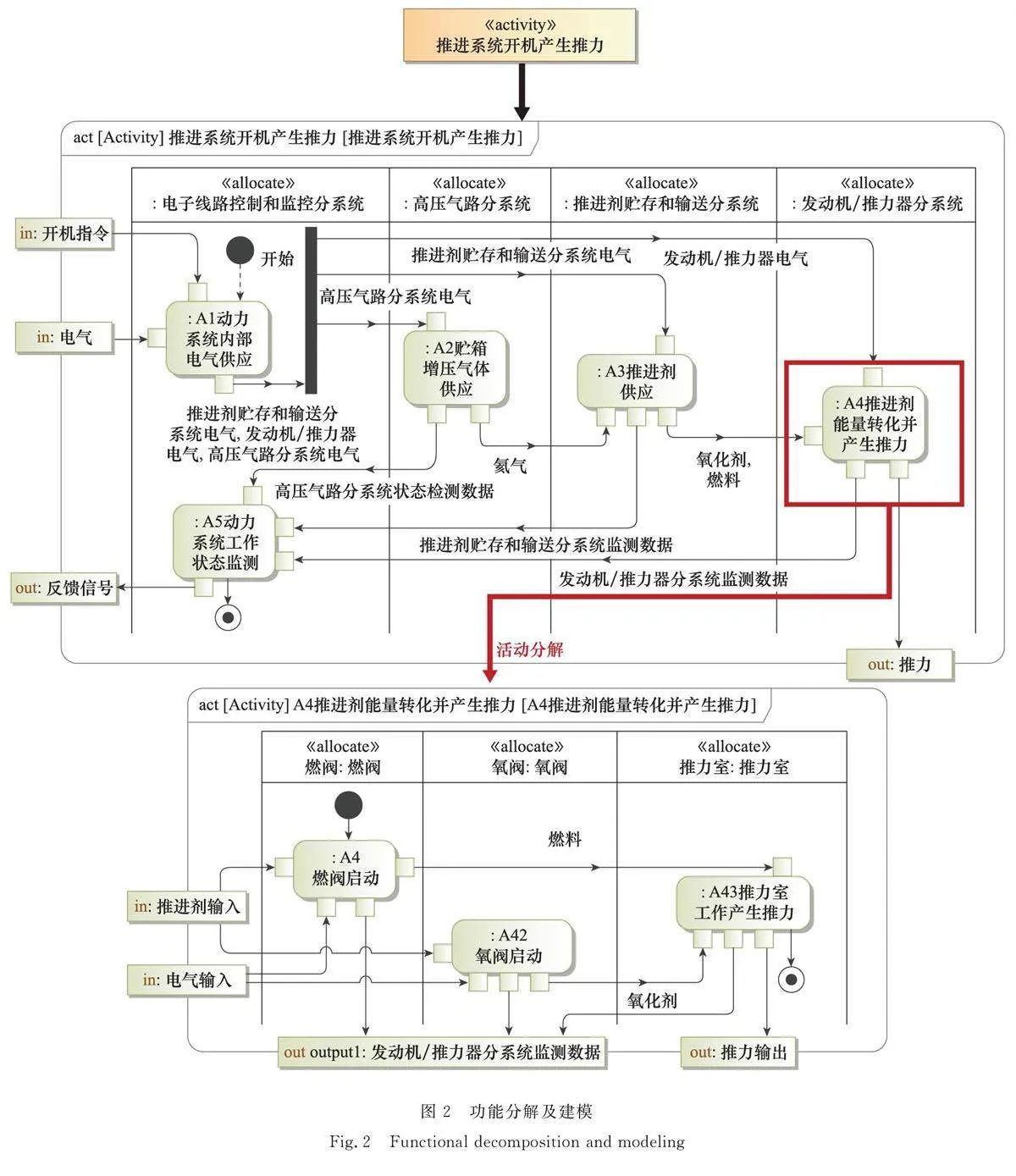
對推進系統功能的描述與分解從頂層功能性需求出發,根據頂層功能性需求確定推進系統功能,利用活動圖對推進系統功能進行細化分解,并利用活動圖中的“泳道”將分解后的功能分配給子系統,獲得子系統的功能并逐級向下分解至最小功能單元。針對推進系統“為載人飛船的軌道轉移、姿態控制及應急飛行提供動力”這一功能性需求,可開展如圖2所示的功能模型建模。具體過程如下:
(1)根據推進系統功能性需求確定“推進系統開機并產生推力”這一活動。
(2)利用活動圖對上述活動進行細化。在圖2中,A1~A4為細化后得到的活動編號。將細化后的活動分配至用“泳道”劃分的子系統中,如將“推進劑能量轉化并產生推力”這一活動分配給發動機/推力器分系統。
(3)針對細分后每個分系統的活動進一步分解直至最小功能單元。如將編號為A4的活動“推進劑能量轉化并產生推力”進一步分解為編號為A41~A43的活動,并將每一個活動繼續分解,直至最小功能單元。
在確定了推進系統的完整架構后,可進一步利用狀態機圖、時序圖等對推進系統的功能進行描述。
3.2參數圖建模
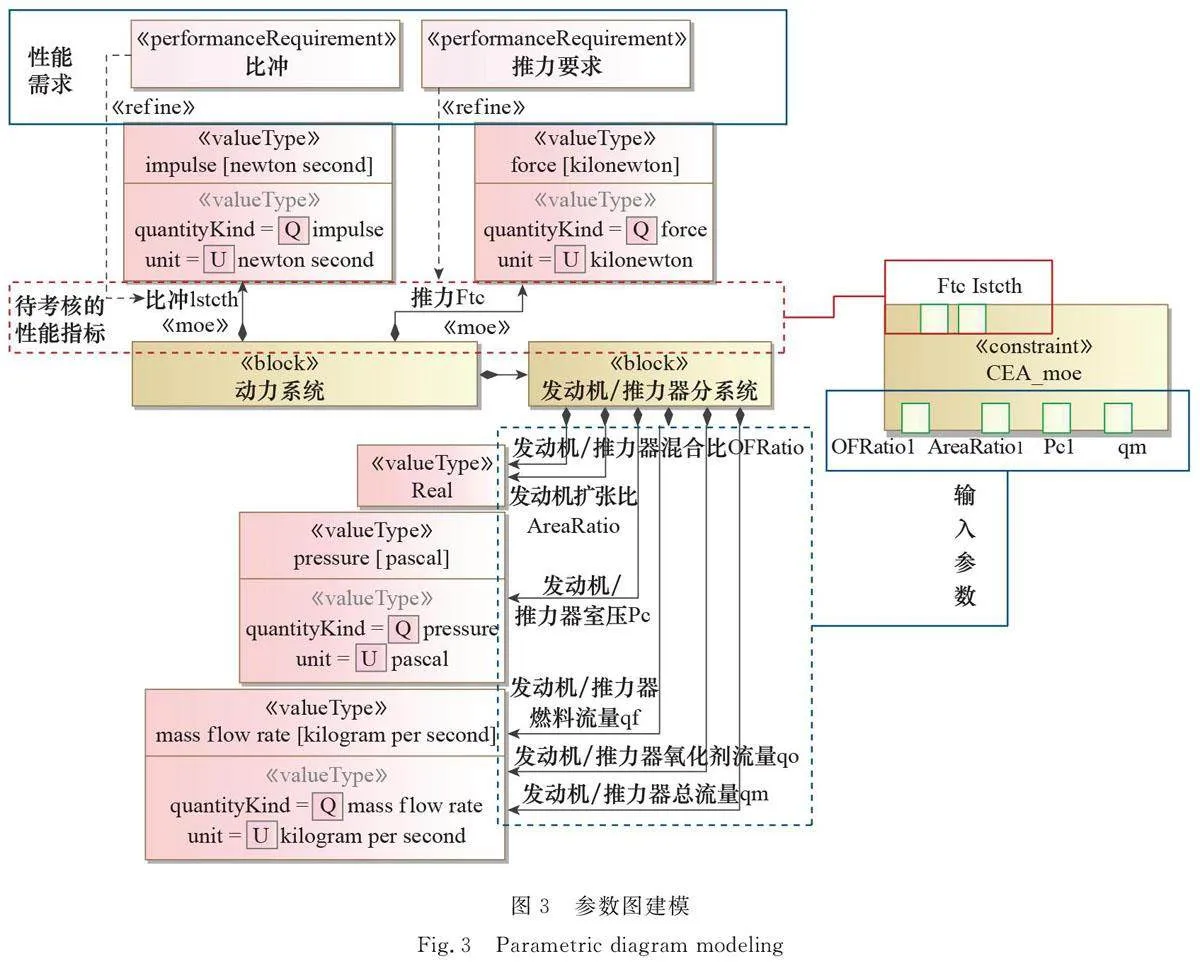
推進系統的性能指標由頂層性能需求確定,然后利用參數圖建立系統性能指標與相關輸入參數的計算模型,并由輸入參數確定低一層級分系統的性能需求及參數等,并逐級向下分解至最小單元。針對推進系統“推力”與“比沖”這兩項性能需求,可開展如圖3所示的參數圖建模。包括:
(1)針對推進系統“推力”與“比沖”這兩項性能需求,確定“推力”“比沖”這兩個性能指標,并在推進系統的模塊中建立值屬性,用效能測量指標(measuresofeffectiveness,MOE)類型進行表征。
(2)利用約束塊建立用于評估推力與比沖的系統靜態仿真模型,并確定與之相關的輸入參數。在約束塊中,輸入參數“Ftc”和“Istcth”,分別表示推力比沖;確定的輸入參數“OFRatio1”為發動機/推力器混合比;“AreaRatio”為發動機擴張比;“Pc1”為發動機/推力器室壓;“qm”為總流量。
(3)將上述輸入參數分配給相關分系統并建立相應的值屬性,如在發動機/推力器中建立描述混合比和室壓的值屬性,并將其作為發動機/推力器的性能指標,形成發動機/推力器的性能需求。
(4)采用上述方法對發動機/推力器的性能需求進行進一步分解,直至最小單元。
3.3結構模型建模
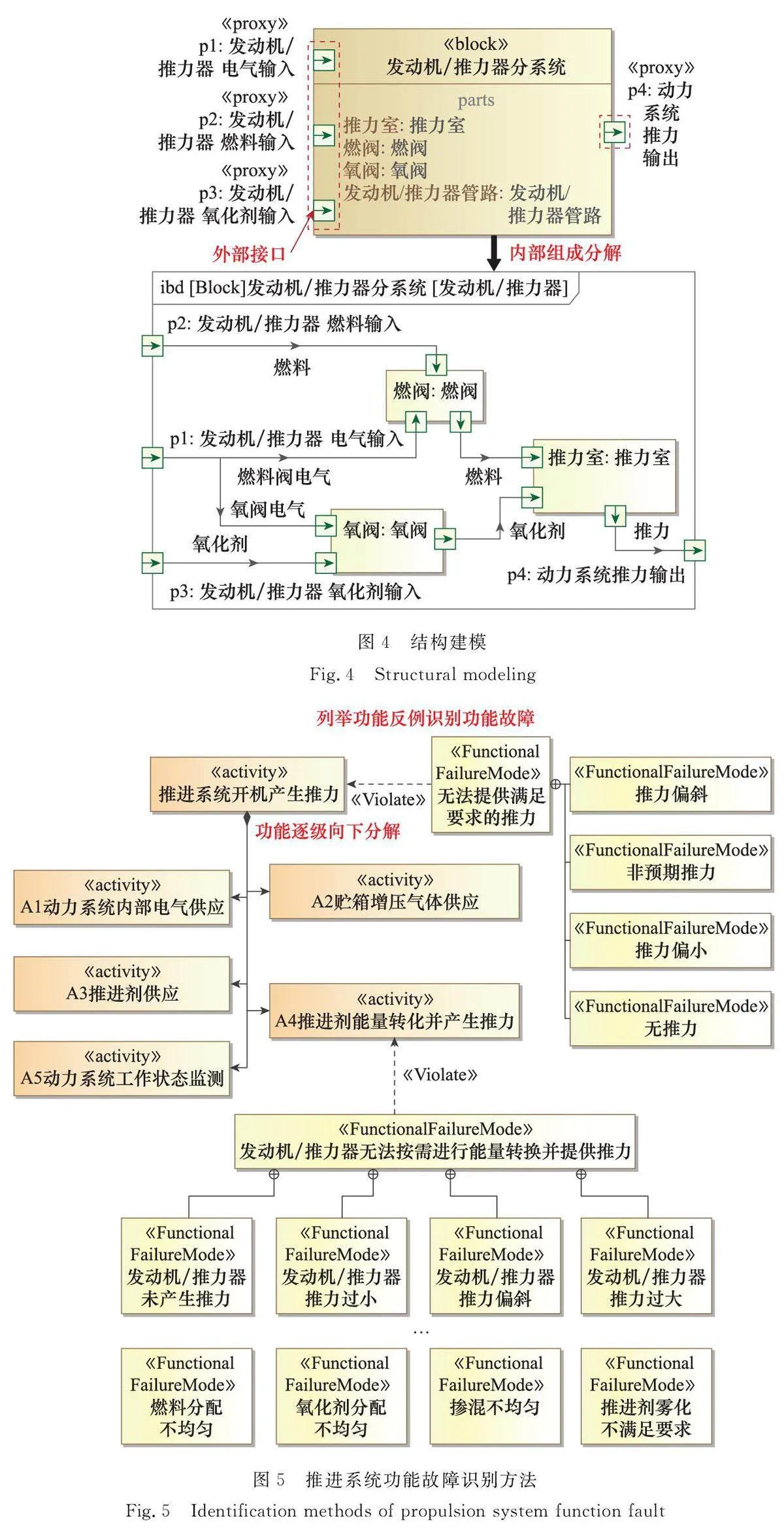
在利用活動圖對推進系統功能進行分解的同時,可以明確將活動圖用于執行各項活動的分系統,并確定各子系統間的傳遞關系。據此可利用模塊定義圖和內部模塊圖建立推進系統的分系統組成及分系統間的接口關系。以圖2中“推進劑能量轉化并產生推力”這一活動所需的發動機/推力器分系統為例,可建立如圖4所示的結構模型,其中“P”表示接口。具體步驟如下:
步驟1 從圖2 中識別出執行“推進劑能量轉化并產生推力”功能所需的“發動機/推力器分系統”及其與其他分系統的接口需求,并在模塊定義圖中建立“發動機/推力器分系統”模塊及與其他分系統的接口。
步驟2 根據對“推進劑能量轉化并產生推力”這一功能的分解確定發動機/推力器分系統的結構組成及內部組件間的傳遞關系,并利用內部模塊圖定義建立各組件,包括燃閥、氧閥、推力室等。
步驟3 建立內部各組件間的傳遞關系。
步驟4 根據各組件的接口特點,結合三維結構設計確定實際物理結構中的接口形式,如焊接、螺紋連接等。
步驟5 結合活動圖重復上述步驟,直至建全推進系統結構模型。
4基于模型的推進系統故障識別與建模
本節以上述功能模型、參數圖、結構模型為依據,介紹系統故障識別方法,并利用所建立的故障基礎模型進行故障模式及其相關要素的建模,以驗證方法的可行性與有效性。
4.1功能故障識別與建模
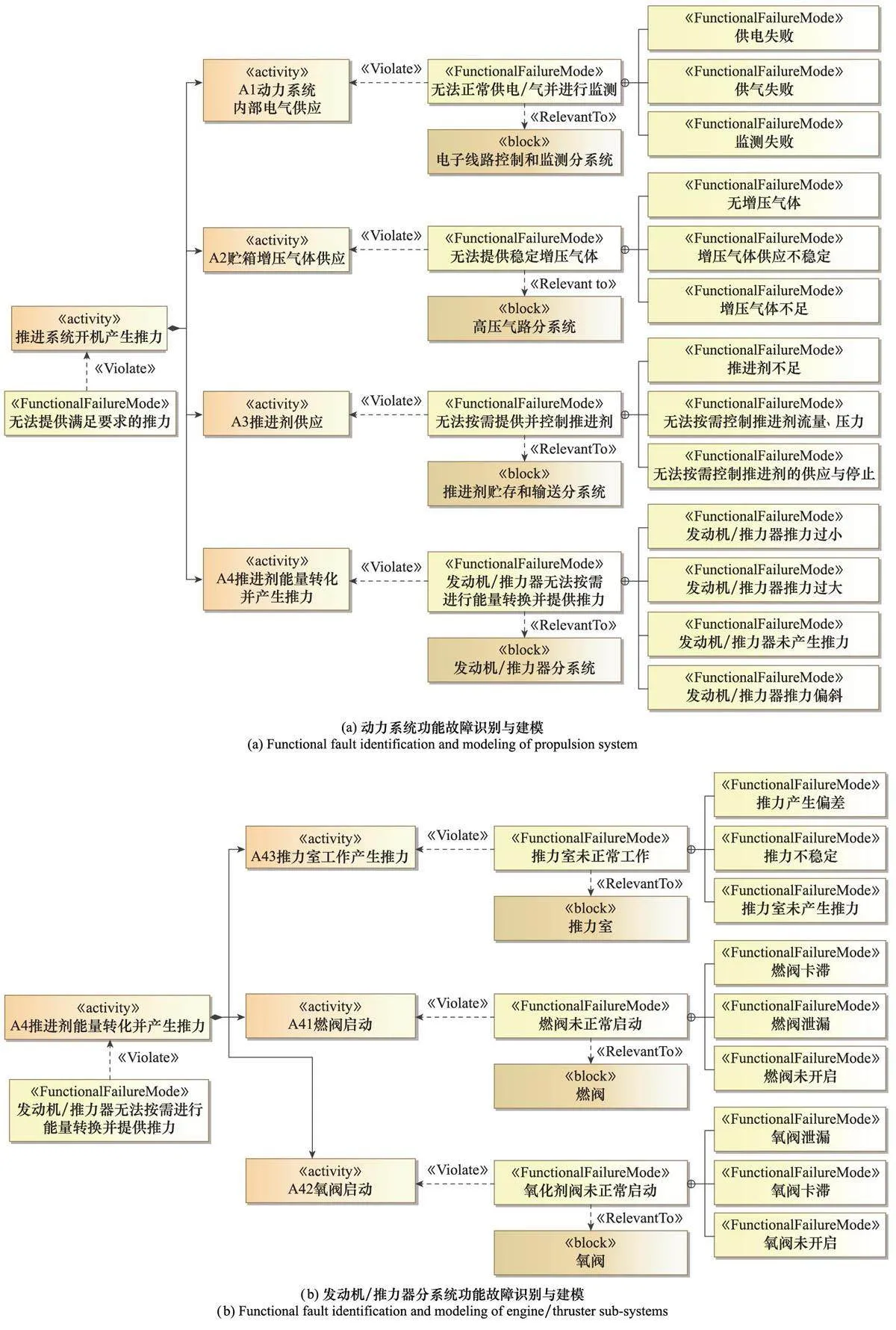
功能故障識別與系統的功能分解同步開展,針對活動圖、狀態機圖、時序圖中所確定的系統功能,通過列舉功能對需求實現的不同程度識別功能故障,包括功能喪失、部分功能喪失、功能退化、功能過度、功能間斷、功能延期、非預期功能等。如圖5所示,針對“推進系統開機產生推力”這一功能,通過列舉其反例識別出包括“推力偏斜”“非預期推力”“推力偏小”“無推力”等功能故障模式。然后,對于功能分解得到的分系統功能,可仍采用列舉反例的方法識別出潛在的功能故障,直至識別出最小功能單元的功能故障。
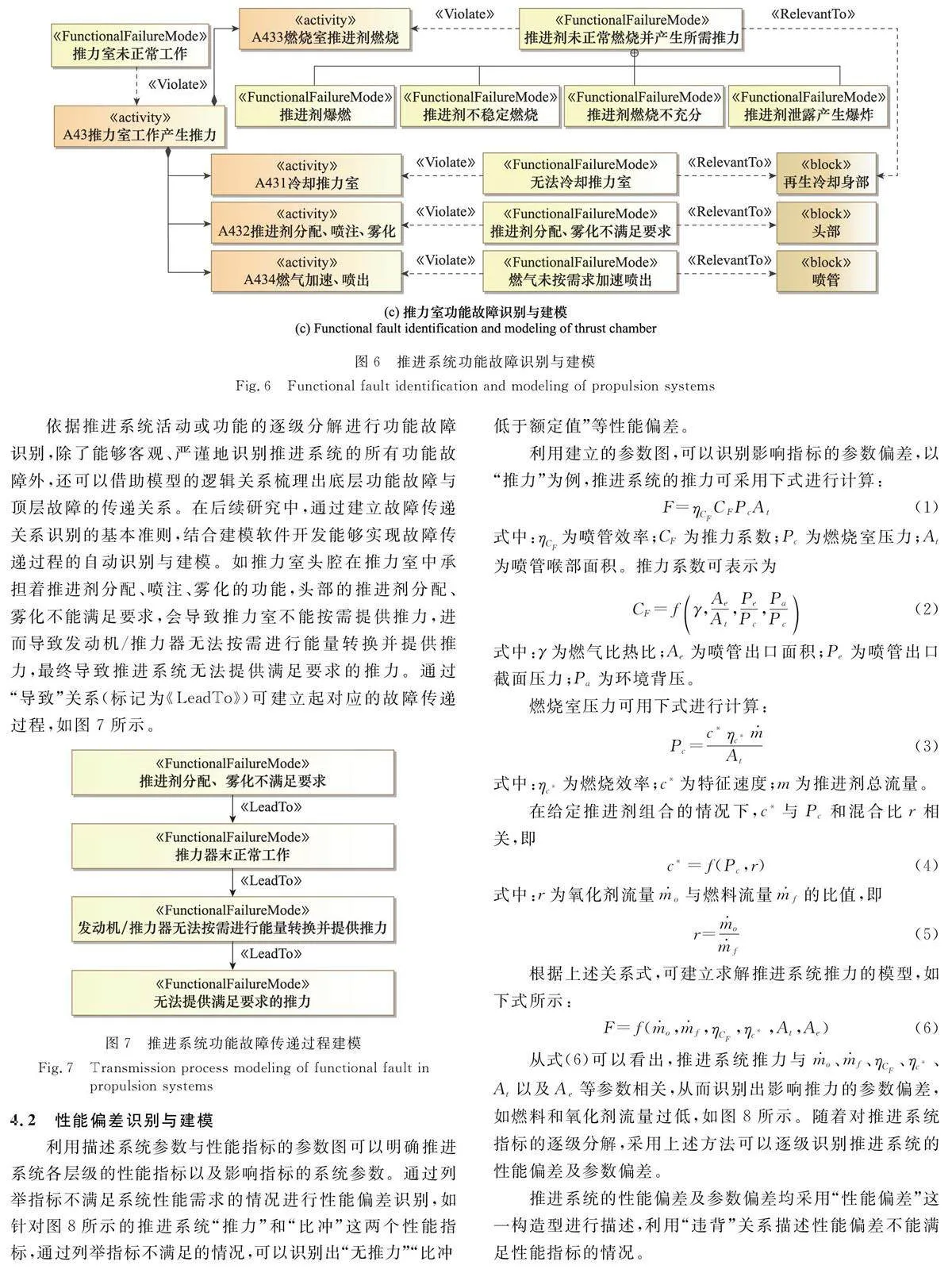
針對所識別的功能故障,采用“功能故障”(標記為《FunctionalFailureMode》)這一構造型對其進行描述,用“違背”關系(標記為《Violates》)描述功能故障對相應功能需求的違背,用“相關”關系(標記為《RelevantTo》)將功能故障與產生功能故障的系統單元進行關聯。所識別的推進系統級、推力器分系統級、推力室部/組件級的功能性故障如圖6所示。
依據推進系統活動或功能的逐級分解進行功能故障識別,除了能夠客觀、嚴謹地識別推進系統的所有功能故障外,還可以借助模型的邏輯關系梳理出底層功能故障與頂層故障的傳遞關系。在后續研究中,通過建立故障傳遞關系識別的基本準則,結合建模軟件開發能夠實現故障傳遞過程的自動識別與建模。如推力室頭腔在推力室中承擔著推進劑分配、噴注、霧化的功能,頭部的推進劑分配、霧化不能滿足要求,會導致推力室不能按需提供推力,進而導致發動機/推力器無法按需進行能量轉換并提供推力,最終導致推進系統無法提供滿足要求的推力。通過“導致”關系(標記為《LeadTo》)可建立起對應的故障傳遞過程,如圖7所示。
4.2性能偏差識別與建模
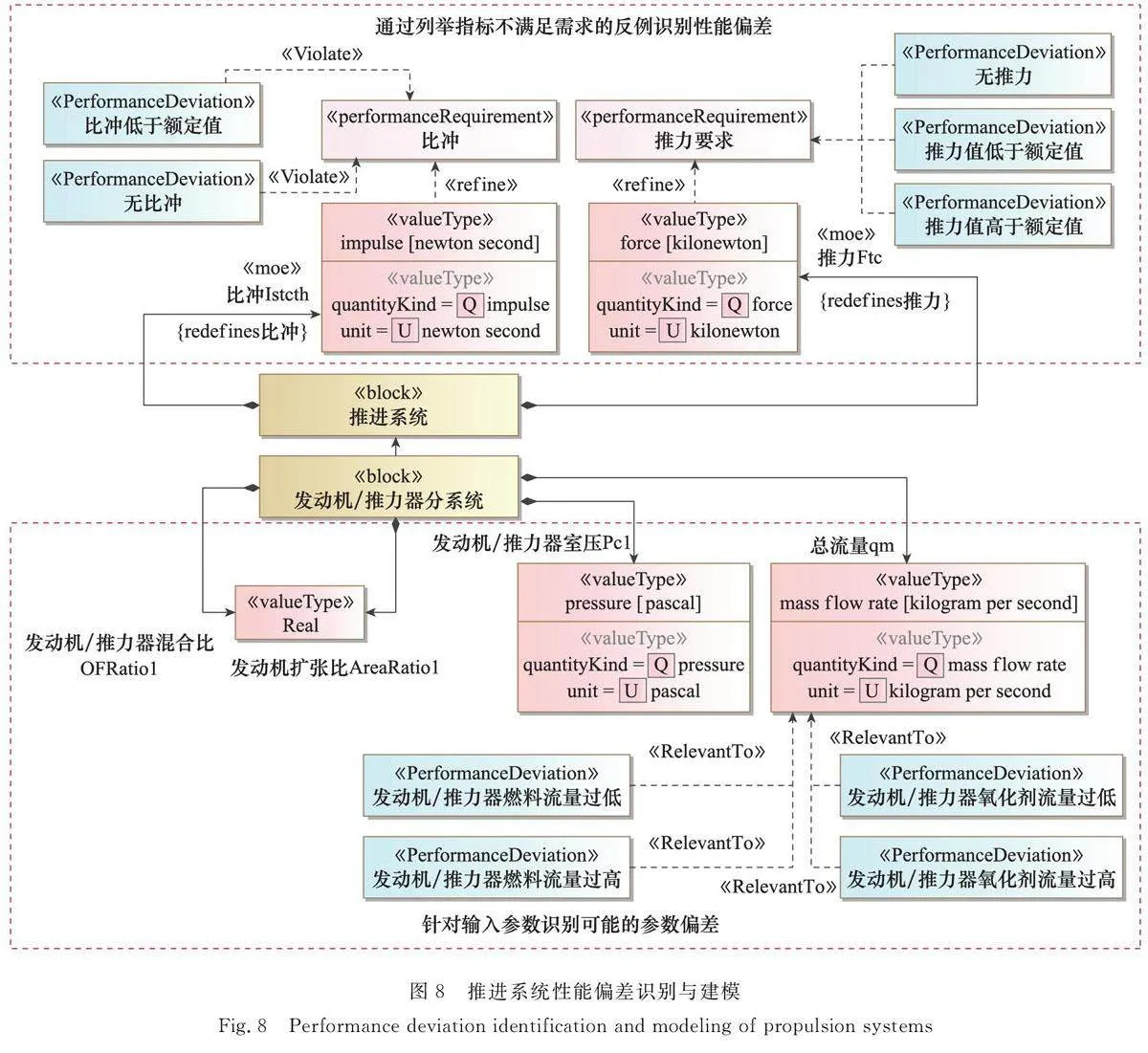
利用描述系統參數與性能指標的參數圖可以明確推進系統各層級的性能指標以及影響指標的系統參數。通過列舉指標不滿足系統性能需求的情況進行性能偏差識別,如針對圖8所示的推進系統“推力”和“比沖”這兩個性能指標,通過列舉指標不滿足的情況,可以識別出“無推力”“比沖低于額定值”等性能偏差。
推進系統的性能偏差及參數偏差均采用“性能偏差”這一構造型進行描述,利用“違背”關系描述性能偏差不能滿足性能指標的情況。
與功能故障識別過程類似,在性能偏差識別過程中,同樣能夠清晰捕獲系統參數波動或底層單元性能波動對上一級性能偏差的影響,并采用“偏差傳遞”進行描述建模,如圖9所示。
4.3結構失效識別與建模
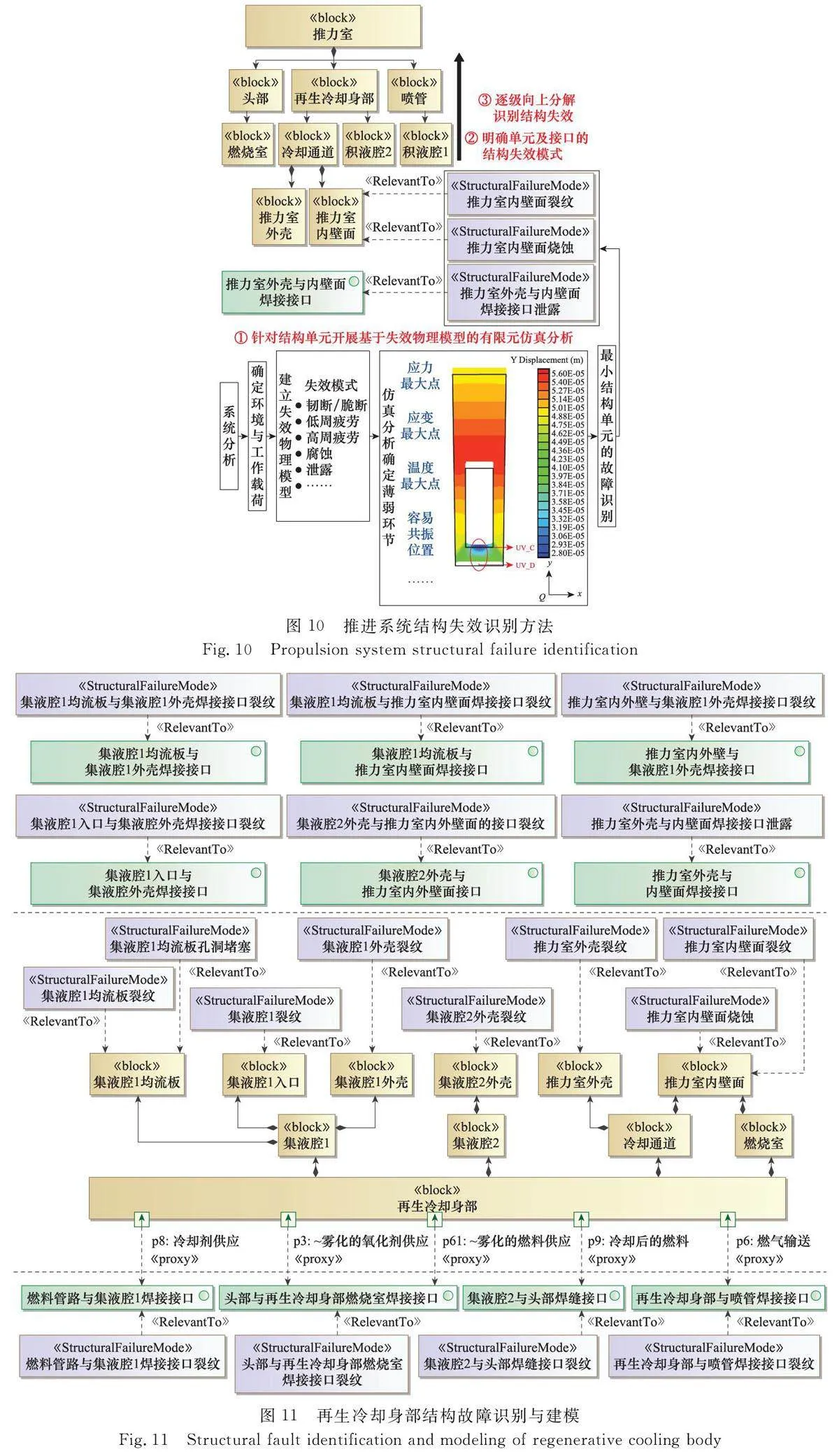
利用推進系統的模塊定義圖、內部模塊圖可獲取系統的全部結構組成及接口,針對上述結構及接口,可自下而上地進行結構失效識別。首先,從底層最小結構單元及接口出發,通過逐個分析其外部環境載荷、工作載荷及可能的失效機理等,借助失效物理模型仿真或已有經驗確定其可能的故障模式,如燒蝕、磨損、斷裂等。然后,利用各層級的模塊定義圖和內部模塊圖逐級向上識別零部件至系統的結構失效,最終實現對推進系統結構失效的識別。
如圖10所示,以推力室中的再生冷卻身部為例,利用基于失效物理的有限元仿真分析,確定其最小零件(如推力室內壁)的結構失效模式,包括“裂紋”“燒蝕”等。通過結構模型建模確定推力室內壁面與推力室外殼之間采用焊接形式進行連接,可確定該接口可能的結構失效形式,包括“推力室外殼與內壁面焊接接口泄漏”的結構失效。采用“結構失效”這一構造型對上述結構失效進行描述,并采用“相關”關系描述結構失效的位置。針對再生冷卻身部,形成如圖11所示的結構失效模式建模。
5結論
針對現有FMEA 和FTA在復雜系統故障識別中存在故障識別不全面、過于依賴個人經驗以及分析模型與設計模型難一致等問題,本文以MBSE 為基礎,開展基于模型的復雜系統故障識別方法研究,提出適用于推進系統這類涉及具體性能和結構設計的底層復雜系統的故障識別方法。以系統正常工作狀態下的系統模型為基礎,從功能、性能、結構3個維度識別潛在故障,并基于SysML擴展機制建立了相對應的故障基礎模型,利用故障基礎模型建立推進系統的故障模型。以新一代載人飛船推進系統為研究對象開展了故障識別與建模,驗證所提方法的可行性與有效性,為推進系統故障識別提供了新思路。通過實例分析可以得到以下結論:
(1)將MBSE 標準化、規范化、全維度的建模過程擴展形成客觀、系統性的故障識別方法,與現有采用FMEA 及FTA 進行故障識別相比,在一定程度上避免了對個人經驗及認知的過于依賴,有助于提升故障識別的全面性。
(2)所提方法在系統正向化設計建模的基礎上同步開展,利用系統正常工作狀態下的模型開展故障識別,并利用SysML的擴展機制建立故障基礎模型用于故障建模,實現故障模型與系統模型的同源性,并避免依靠紙質文檔進行故障梳理的繁雜以及系統狀態更改后設計模型與故障識別所用模型的不一致等問題。
(3)借助于本文所建立的方法層的故障基礎模型,能夠開展基于SysML 的FMEA及FTA建模,并實現與SysML建立的系統模型、故障模型的關聯;此外,在開展基于模型的故障識別的過程中,依靠系統模型的逐級分解細化識別故障,能夠清晰地獲取底層故障或偏差對上層故障的傳遞關系。通過對故障傳遞關系的建模和追溯,可以快速獲得故障傳遞鏈路,使可靠性分析人員準確、快捷地進行FMEA及FTA的構建及后續的可靠性分析。
本文所提故障識別方法針對推進系統這類涉及具體性能分析和結構設計的底層分系統,對于頂層系統級或任務級的故障識別,主要以系統或任務的功能分析為主,需發展相應的故障識別方法與準則。受限于軟件的功能,目前在進行故障模式及故障傳遞關系的識別與建模時,仍需要人為依據系統模型進行梳理與建模,后續可在本文所提方法的基礎上,提煉形成通過列舉反例識別故障及依據模型梳理故障傳遞關系的基本準則,將該準則與軟件開發相結合,并引入人工智能算法,最終實現故障識別與故障傳遞關系的智能自動生成,提高故障識別的全面性及分析效率。
作者簡介
戚亞群(1993—),女,博士,主要研究方向為液體火箭發動機可靠性、基于模型的系統工程。
金平(1979—),女,副教授,博士,主要研究方向為液體火箭發動機總體設計、可重復使用火箭發動機壽命與可靠性。
彭祺擘(1982—),男,研究員,博士,主要研究方向為載人月球探測任務分析與設計、基于模型的系統工程。
張海聯(1974—),男,研究員,博士,主要研究方向為載人航天總體技術、基于模型的系統工程、固體力學。
蔡國飆(1967—),男,教授,博士,主要研究方向為液體火箭發動機多學科優化與重復使用技術、真空羽流效應及防護技術、固液混合動力火箭技術。
