基于線性自抗擾控制的單相電力電子變壓器整流級控制策略
2024-01-19 08:16:58宋平崗連加巍鄭雅芝龍日起楊長欖
電測與儀表 2024年1期
宋平崗,連加巍,鄭雅芝,龍日起,楊長欖
(華東交通大學 電氣與自動化工程學院, 南昌 330000)
0 引 言
電力電子變壓器(power electronic transformer,PET)作為一種將電力電子變流技術與高頻變壓技術結合起來的新型能量轉換系統,近年來廣泛應用于電力系統的課題研究中,發展潛力巨大。其不僅可以實現傳統電力變壓器電壓轉換和能量傳輸的功能,還具有體積小、無污染、電壓穩定可調、高低側故障隔離以及功率可控等優點[1]。級聯H橋整流器(cascaded H-bridge rectifier,CHBR)作為PET的前級系統,調制算法簡單、模塊化、維護簡單,在工業中已取得廣泛應用[2-3]。
近年來,眾多學者對于CHBR型整流器的控制算法進行了深入研究,文獻[4]將滑模變結構控制策略應用到PET的整流級,但滑模自身固有的高頻抖振問題是實際應用中的主要障礙。文獻[5]采用了一種非線性PID控制方法,該方法雖然簡單通用,但對非線性函數的選取要求高,當系統的工況發生改變時,系統很容易失去穩定性。文獻[6]采用了一種準PR控制技術,雖然提高了系統穩定性,抑制了網側電流諧波,但對系統中參數的設計精度要求高。
工程控制中的被控對象大都是非線性的,并且干擾和不確定性廣泛存在于被控對象和控制系統中。傳統PID控制動態響應慢,當受到外部的劇烈干擾后,波動大,抗擾能力差。而自抗擾控制(active disturbance rejection control, ADRC)作為一種非線性控制系統是文獻[7]中提出的,其具有響應速度快,魯棒性強、控制精度高等優點。其核心思想是將系統轉換為簡單的積分串聯形式,從而把實際對象和標準型的差作為廣義擾動(系統的內部擾動和外部擾動)通過估計而相消,極具創造性地解決了系統的不確定性問題[8]。ADRC包括三個核心組成部分:跟蹤微分器(TD)、擴張狀態觀測器(ESO)、非線性誤差反饋控制率(SEF)[9]。因其采用的非線性函數參數數目多,調節復雜,文獻[10]中通過頻率尺度的概念,提出了線性自抗擾控制器結構,利用帶寬整定控制器參數,提供了易于實現簡化的公式,進一步推動了ADRC控制理論的發展[11]。文獻[12-13]對LADRC的穩定性進行了理論分析證明。
ADRC作為一種新型的非線性控制策略,已經在眾多的領域中得到應用。文獻[14]將ADRC應用到光伏并網逆變器中,提高了系統的動靜態性能;文獻[15]提出將ADRC應用到風力發電無功補償當中,有效抑制了系統的低頻震蕩;文獻[16]將LADRC應用到四旋翼無人機中,提高了系統的魯棒性。
雖然ADRC控制策略在很多領域得到應用,但尚未有相關文獻將ADRC控制應用到電力電子變壓器中。因此,文章以電力電子變壓器的前級系統單相CHBR為研究對象,在電壓環采用LADRC控制策略,通過分析單相CHBR的數學模型對控制器進行設計。結合負載平衡,負載不平衡以及負載突變時的仿真波形與傳統PI控制相對比。對比分析得出:采用LADRC控制器時,系統能夠取得更好的控制效果。
1 單相級聯H橋整流器拓撲
1.1 單相級聯H橋整流器拓撲結構
以單相三級聯H橋整流器為例,其拓撲結構如圖1所示。開關管由帶反并聯二極管的全功率型半導體開關器件構成。直流側采用電容儲能,網側電感用于濾除交流側電流諧波成分。其中L和Rs為網側電感和等效電阻;Ti1、Ti2、Ti3、Ti4(i= 1,2,3)為第i個H橋的開關器件;us為網側電壓;is為網側電流;uab為交流側輸入電壓;uC1、uC2、uC3為各H橋直流側懸浮電容C1、C2、C3的電壓;R1、R2、R3為各H橋等效電阻。
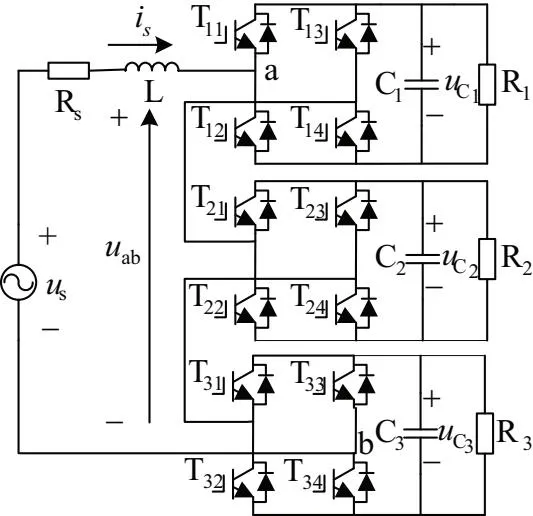
圖1 單相三級聯H橋整流器拓撲結構
1.2 單相級聯H橋整流器數學模型
首先定義開關管的開關函數,定義第i個H橋的開關管工作狀態為Si;Si一共有三種工作狀態,分別為1、 0、-1。

(1)
(2)
(3)
采用二階廣義積分(SOGI)構造網側輸入電壓us,電流is的虛擬正交分量[17],再經由αβ/dq坐標變換后將式(3)轉化為式(4)的形式。
(4)
2 LADRC工作原理
LADRC由線性擴張狀態觀測器(LESO),線性誤差反饋控制率(LSEF)以及擾動補償項組成。
2.1 線性擴張狀態觀測器(LESO)
考慮單輸入單輸出的一階系統:
式中f為系統的總擾動;u為系統控制量;b為控制器增益;ω為內部擾動;d為外部擾動;x為系統的狀態變量;y為系統的輸出值,假設f可微,將系統擴展為一個新的狀態變量。即:
(5)
其中x1=y,x2=f;由龍貝格提出的狀態觀測器理論,LESO狀態方程如下:
(6)

(7)
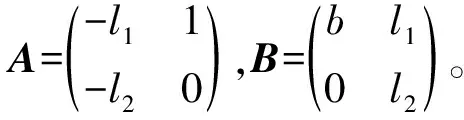
參數l1,l2可以通過系數矩陣A的特征根求得:
|sE-A| =s2+l1s+l2= (s+ω0)2
(8)
2.2 線性誤差反饋控制率(LSEF)
(9)
式中b0為b的估計值。
(10)
其中x*為系統的給定參考值,Kp為比例系數。
則系統的傳遞函數可以寫為:
因此將Kp配置到控制器的極點,即Kp=ωc;其中ωc為控制器的帶寬。
一階系統的LADRC控制框圖如圖2所示。
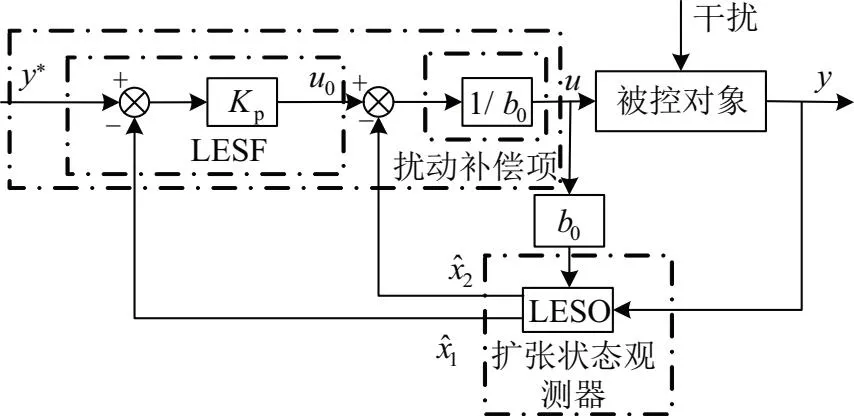
圖2 一階LADRC控制器框圖
3 級聯H橋整流器控制策略
3.1 LADRC控制器設計
由式(4)中的直流側電壓狀態方程設計LADRC控制器。方程如下:
(11)
由式(11)可知單相級聯H橋整流器為一階被控對象,因此按照一階LADRC進行控制器的設計。因此將式(11)改寫為:
(12)
設狀態變量x1=udc,x2=f,其中x2是擴展的狀態變量。將式(12)按照式(5)的形式進行改寫,形式如下:
(13)
則LESO的狀態方程為:
(14)

控制率和LSEF按照式(9)、式(10)進行設計,此處不在過多描述。
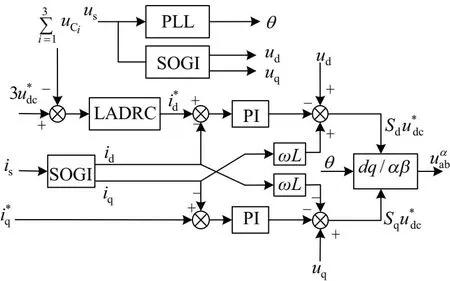
圖3 dq軸電流解耦控制圖
(15)
3.2 直流電容電壓平衡控制
電力電子變壓器中級聯H橋整流級中各H橋直流側懸浮電容電壓的均衡是電力電子變壓器安全穩定運行的前提;直流側電壓的不平衡很容易導致器件損壞,更嚴重地將造成整個系統的崩潰。因此制定相應的控制策略對級聯H橋整流器至關重要。

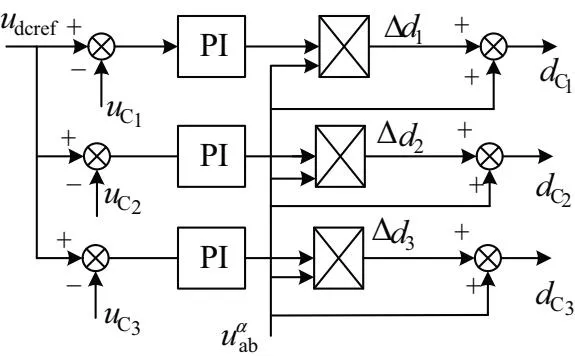
圖4 電容電壓平衡控制圖
4 仿真結果分析
為驗證LADRC控制策略的有效性,通過Matlab/Simulink仿真軟件搭建單相三級聯H橋整流器仿真模型。系統仿真參數如表1所示。
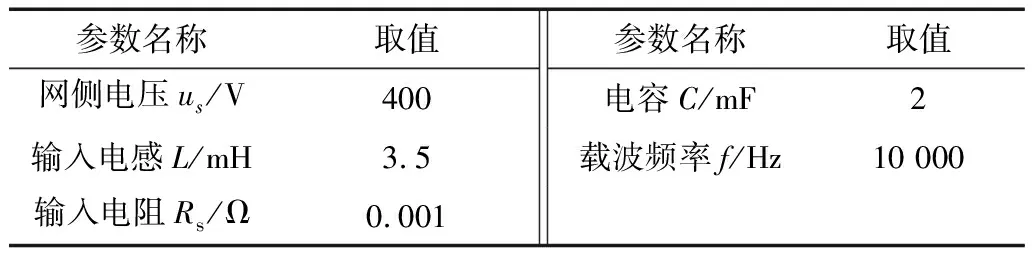
表1 三級聯H橋整流器系統參數

圖5為LADRC控制下系統穩態運行時網側電流電壓波形。可以看出,在該控制策略下系統網側電流電壓波形能保持同相位,即系統可以實現單位功率因數運行。圖6為電壓環采用LADRC控制時的網側電流的傅里葉分析圖,THD值為4.58%;圖7為采用傳統PI控制時網側電流的傅里葉分析圖,THD值為6.13%。經過對比可知,采用LADRC控制時,系統的THD減小1.55%,具有更好的諧波特性。
為驗證LADRC的優越性,分別對直流側負載平衡時、負載不平衡時、負載突變時的仿真結果進行分析。
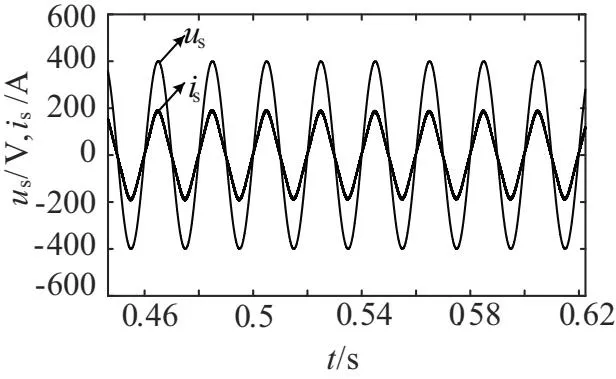
圖5 穩態時網側電流電壓波形圖
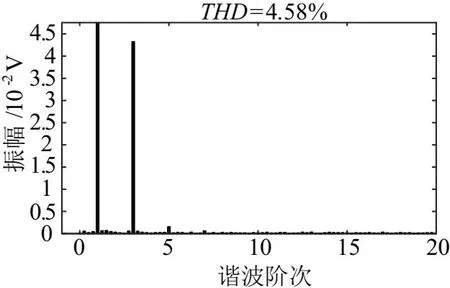
圖6 LADRC控制時網側電流傅里葉分析圖
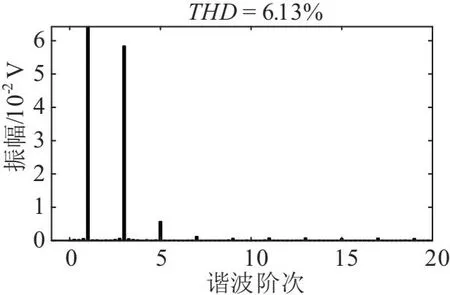
圖7 PI控制時網側電流傅里葉分析圖
圖8為三個H橋直流側負載R1、R2、R3都為100 Ω時采用LADRC控制和PI控制時電容電壓波形圖。可知采用LADRC控制時電容電壓在0.2 s時快速無超調地達到給定值。采用PI控制時電容電壓在0.8 s時達到給定值。由此可以得出,采用LADRC控制時系統達到穩態的響應時間優于PI控制。

圖8 負載平衡時兩種控制策略對比圖
圖9和圖10分別為直流側負載不平衡時LADRC控制以及PI控制時電容電壓仿真波形圖。各H橋直流側負載參數為:R1=100 Ω、R2=110 Ω、R3=115 Ω。可以看出采用LADRC控制策略時各直流側電容電壓能夠在0.25 s內快速達到平衡并跟蹤給定電壓值。采用PI控制時各電容電壓在0.5 s左右達到平衡,在0.7 s左右才能達到跟蹤給定值。通過對比可知負載不平衡時采用LADRC控制策略系統的響應速度更快,抗擾動能力更強。
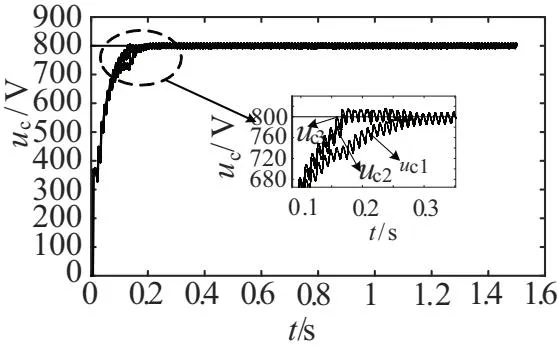
圖9 LADRC控制負載不平衡電容電壓波形圖
圖11和圖12為直流側負載在1 s時發生突變時采用LADRC控制和PI控制各H橋電容電壓波形圖。各單元模塊負載在100 Ω的基礎上突變值為R1= 120 Ω、R2=180 Ω、R3= 220 Ω,從圖中可知采用LADRC控制策略當負載突變時,各直流側電容電壓能夠在1.2 s恢復平衡,突變后的電壓幅值和相位波動很小。采用PI控制時各電容電壓在1.42 s秒左右才恢復平衡,突變后的電壓相位和幅值波動較大。通過對比可知負載突變時采用LADRC控制策略系統的擾動能力更強,性能更優越。
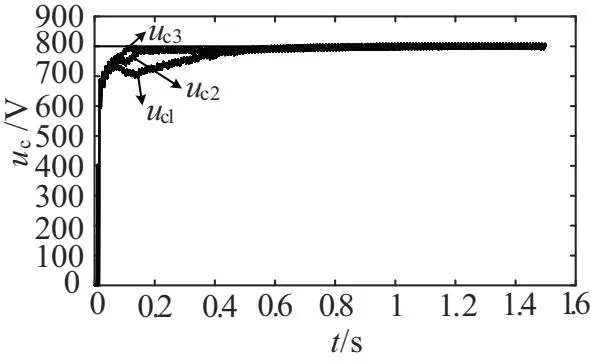
圖10 PI控制負載不平衡電容電壓波形圖
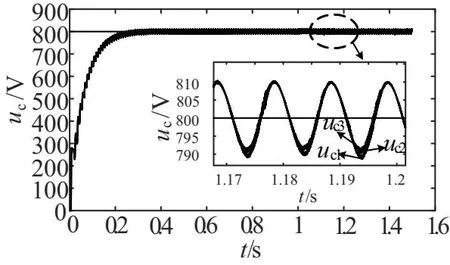
圖11 LADRC控制負載突變電容電壓波形圖
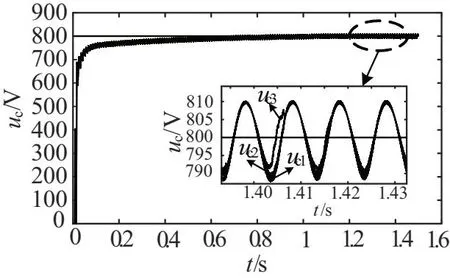
圖12 PI控制負載突變電容電壓波形圖
5 結束語
文章通過建立分析電力電子變壓器整流級的拓撲結構和數學模型,提出了一種基于線性自抗擾控制的電壓環控制策略,并與傳統PI控制策略相對比。對比仿真得出如下結論:
1) 采用LADRC控制的電力電子變壓器整流級系統網側電流具有更小的THD值;
2)該控制策略在負載平衡運行狀態下,能夠快速達到平衡并跟蹤系統給定值,響應速度更快;
3)在負載不平衡和突變時具有良好的抗擾動能力,能夠使電力電子變壓器更高效、更穩定地運行。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
