分布式動(dòng)力翼前飛狀態(tài)動(dòng)力/氣動(dòng)耦合特性
2024-03-01 11:00:20王科雷周洲郭佳豪李明浩
航空學(xué)報(bào) 2024年2期
王科雷,周洲,郭佳豪,李明浩
西北工業(yè)大學(xué) 航空學(xué)院,西安 710072
提高飛行效率、降低燃油消耗率是飛行器設(shè)計(jì)追求的永恒目標(biāo)之一。面對(duì)未來(lái)航空器高經(jīng)濟(jì)性、低能耗、低噪聲和低污染的“綠色航空”[1]發(fā)展需求,世界各航空大國(guó)均已規(guī)劃了各自的發(fā)展藍(lán)圖[2-4],其中,美國(guó)國(guó)家航空航天局(National Aeronautics and Space Administration, NASA)的“N+3”計(jì)劃[5]指出,到2035 年商業(yè)民用客機(jī)的燃油消耗率要再降低60%。顯然,為了實(shí)現(xiàn)這一宏大目標(biāo),需要在包括氣動(dòng)、結(jié)構(gòu)、控制以及動(dòng)力等多個(gè)技術(shù)領(lǐng)域內(nèi)有所突破,其中,動(dòng)力系統(tǒng)革新尤為受關(guān)注。在眾多創(chuàng)新概念中,分布式混合推進(jìn)系統(tǒng)技術(shù)展現(xiàn)出了明顯的發(fā)展?jié)摿ΓM管目前仍在電力儲(chǔ)能、電推進(jìn)系統(tǒng)等方面存在技術(shù)瓶頸,但是新型推進(jìn)方式的變革體現(xiàn)了飛行器設(shè)計(jì)從單一動(dòng)力研究到飛行器總體、動(dòng)力、氣動(dòng)等技術(shù)集成研究的變化,很有可能成為航空工業(yè)的革命性轉(zhuǎn)折,為航空科技發(fā)展提供新的方向[6-7]。
分布式混合電推進(jìn)系統(tǒng)是指通過傳統(tǒng)燃?xì)鉁u輪發(fā)動(dòng)機(jī)為分布在機(jī)翼或機(jī)身的多個(gè)電機(jī)/風(fēng)扇提供電力,并由電機(jī)驅(qū)動(dòng)風(fēng)扇提供絕大多數(shù)或全部推力的一種新型推進(jìn)系統(tǒng)概念。與傳統(tǒng)動(dòng)力推進(jìn)相比,分布式混合電推進(jìn)系統(tǒng)具備高可靠、易分配、尺度無(wú)關(guān)等特性[8-9],其布置更加高效靈活,與飛行器機(jī)體融合度顯著提高,可以有效改善原有飛行器結(jié)構(gòu)、大幅提高等效涵道比、降低油耗及減少噪聲和排放,在軍民航空領(lǐng)域均極具應(yīng)用價(jià)值,目前已引起了世界各大航空研發(fā)機(jī)構(gòu)的高度重視,而隨著國(guó)內(nèi)外圍繞分布式動(dòng)力/機(jī)翼耦合設(shè)計(jì)問題的研究工作逐漸增多,已形成部分認(rèn)識(shí),并引發(fā)了動(dòng)力/氣動(dòng)設(shè)計(jì)理念的革新[10-14]。
現(xiàn)有分布式混合電推進(jìn)飛行器整體上可以歸結(jié)為3 種基礎(chǔ)氣動(dòng)布局形式:① 翼前/翼后分布式動(dòng)力,機(jī)翼翼面完全處于動(dòng)力噴流流管內(nèi),或動(dòng)力處于機(jī)翼尾跡流場(chǎng)內(nèi),如美國(guó)X-57 飛機(jī);② 翼上/翼下分布式動(dòng)力,機(jī)翼翼面局部受到動(dòng)力抽吸和噴流誘導(dǎo),而機(jī)翼外部流動(dòng)形態(tài)亦對(duì)動(dòng)力工作狀態(tài)有所影響,如德國(guó)Lilium Jet“百合”垂直起降飛機(jī)、美國(guó)NASA N3-X 通用客機(jī);③ 分布式動(dòng)力翼(Distributed-Propulsion-Wing, DPW),內(nèi)外流完全摻混,動(dòng)力即機(jī)翼,機(jī)翼即動(dòng)力,如美國(guó)XV-24“雷擊”垂直起降無(wú)人機(jī)。其中前2 種氣動(dòng)布局形式相對(duì)常規(guī),可以借鑒傳統(tǒng)思路和方法進(jìn)行氣動(dòng)外形設(shè)計(jì),但第3 種分布式動(dòng)力翼布局形式已然打破了傳統(tǒng)飛發(fā)匹配概念,實(shí)現(xiàn)了分布式動(dòng)力與機(jī)翼氣動(dòng)面的完全融合,這為飛行器高效設(shè)計(jì)帶來(lái)極大的空間,但同時(shí)也帶來(lái)極大的復(fù)雜度和困難,亟須圍繞其動(dòng)力/氣動(dòng)耦合特性開展詳細(xì)分析研究,進(jìn)而為后續(xù)開展動(dòng)力/氣動(dòng)一體化設(shè)計(jì)提供理論支撐,這是本文主要關(guān)注點(diǎn)。
對(duì)于涵道風(fēng)扇問題,目前主要圍繞數(shù)值求解方法[15-17]、槳葉設(shè)計(jì)[18-20]和氣動(dòng)特性分析[21-23]3 個(gè)方面展開。而對(duì)于分布式涵道風(fēng)扇問題,目前主要關(guān)注由動(dòng)力分布帶來(lái)的圓形和方形涵道唇口影響[24-25]、翼上分布式涵道風(fēng)扇邊界層抽吸效應(yīng)[26-30]以及從動(dòng)力、氣動(dòng)單學(xué)科出發(fā)的考慮機(jī)翼安裝約束的分布式涵道風(fēng)扇進(jìn)氣道設(shè)計(jì)[31]、考慮分布式排布的涵道風(fēng)扇動(dòng)力單元懸停/平飛多目標(biāo)設(shè)計(jì)[32]和耦合分布式涵道風(fēng)扇的機(jī)體氣動(dòng)布局設(shè)計(jì)[33]。總的來(lái)說(shuō),現(xiàn)有研究主要針對(duì)涵道風(fēng)扇內(nèi)流特性及其對(duì)機(jī)翼外部流動(dòng)的氣動(dòng)影響展開,對(duì)于涵道外壁直接充當(dāng)氣動(dòng)面的問題鮮有研究。
因此,本文以類美國(guó)XV-24“雷擊”垂直起降無(wú)人機(jī)布局的分布式動(dòng)力翼為研究對(duì)象,首先開展分布式動(dòng)力翼參數(shù)化建模方法研究,通過程序?qū)崿F(xiàn)復(fù)雜曲面自動(dòng)造型。然后,基于計(jì)算流體力學(xué)(Computational Fluid Dynamics,CFD)方法,使用商業(yè)軟件FLUENT,由動(dòng)力翼二維剖面翼型到動(dòng)力翼單元翼段,再到分布式動(dòng)力翼整體依次進(jìn)行數(shù)值模擬及動(dòng)力/氣動(dòng)耦合特性分析,從設(shè)計(jì)角度考慮,XV-24 鴨式布局俯仰力矩配平能力較強(qiáng),因此重點(diǎn)關(guān)注分布式動(dòng)力翼的升阻特性與推進(jìn)特性。最后,對(duì)分布式動(dòng)力翼內(nèi)外流耦合與其動(dòng)力/氣動(dòng)耦合特性變化之間關(guān)系進(jìn)行歸納總結(jié),同時(shí)提出對(duì)分布式動(dòng)力翼動(dòng)力/氣動(dòng)一體化設(shè)計(jì)思路的建議。
1 分布式動(dòng)力翼參數(shù)化建模方法
參考美國(guó)XV-24“雷擊”垂直起降無(wú)人機(jī)布局形式,構(gòu)建如圖1 所示包含6 個(gè)涵道風(fēng)扇的分布式動(dòng)力翼半展長(zhǎng)模型作為設(shè)計(jì)對(duì)象進(jìn)行分析研究。該分布式動(dòng)力翼可以按照“方-圓-方”動(dòng)力翼單元進(jìn)行劃分,各動(dòng)力翼單元核心為包含轉(zhuǎn)子、槳轂、涵道筒的轉(zhuǎn)動(dòng)部件(Rotor Compo?nent)、“方-圓”進(jìn)氣道(Inlet)和“圓-方”排氣道(Outlet),外壁采用常規(guī)機(jī)翼上下翼面作為動(dòng)力翼外翼面(Duct-wing)。研究過程中始終保持轉(zhuǎn)子及槳轂的幾何模型固定不變,分別對(duì)涵道筒、“方-圓”進(jìn)氣道、“圓-方”排氣道和動(dòng)力翼外翼面進(jìn)行參數(shù)化建模。這里,考慮涵道筒幾何型面相對(duì)簡(jiǎn)單,僅采用涵道筒半徑R及其長(zhǎng)度lhd進(jìn)行描述,此處不再贅述。此外,為了便于分析,擬排除因動(dòng)力內(nèi)流特征變化而產(chǎn)生對(duì)動(dòng)力翼外流特征及升阻特性帶來(lái)的影響,采用單一變量法,對(duì)動(dòng)力翼內(nèi)壁面進(jìn)行簡(jiǎn)化處理。一方面在對(duì)比分析過程中保持動(dòng)力翼內(nèi)壁面及轉(zhuǎn)動(dòng)部件模型始終不變;另一方面約束進(jìn)、排氣道曲面始終沿垂向上下、沿展向左右對(duì)稱,進(jìn)而在一定程度保證來(lái)流狀態(tài)改變時(shí),動(dòng)力翼氣動(dòng)特性變化僅與外翼面模型參數(shù)相關(guān)聯(lián)。
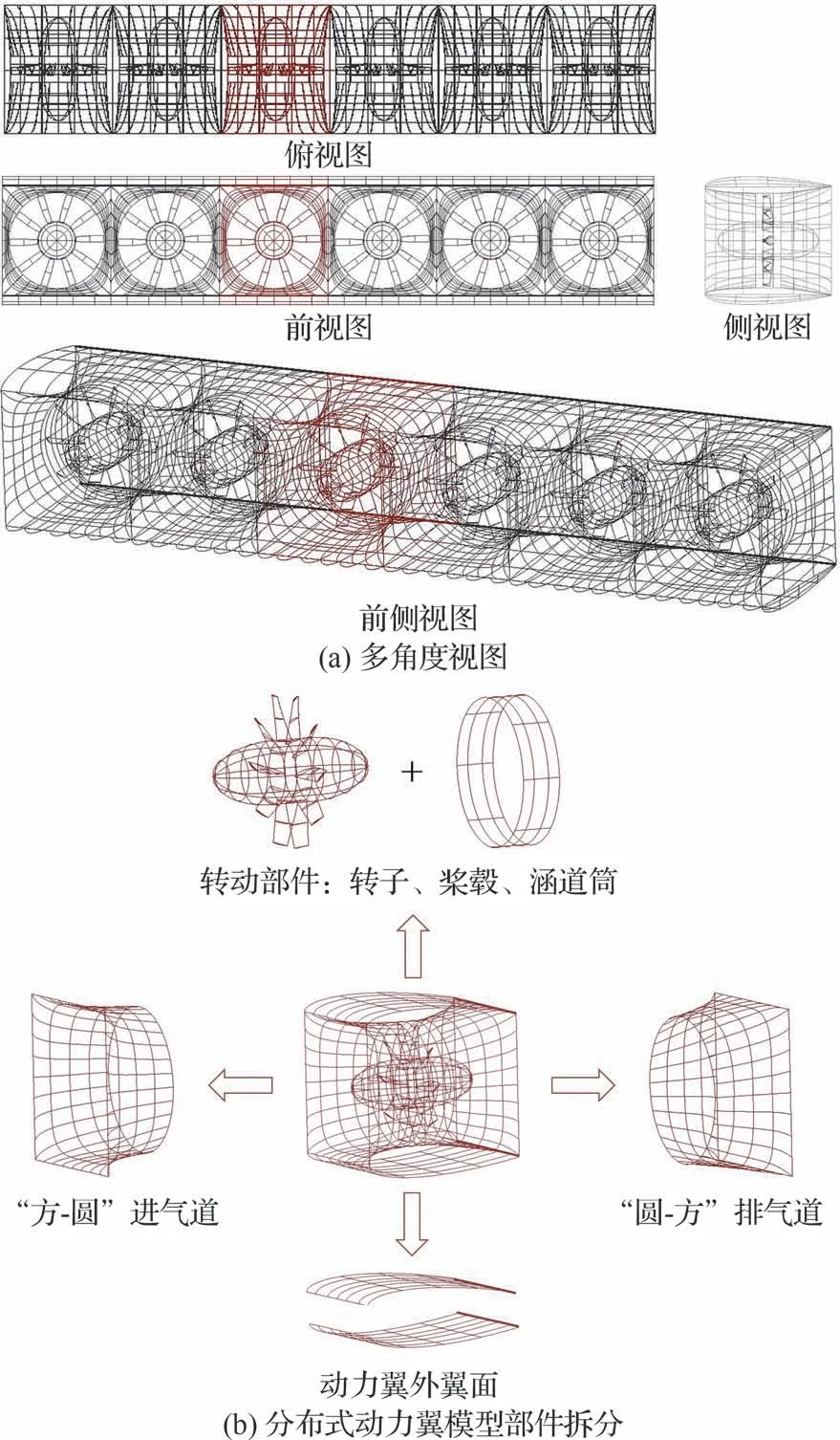
圖1 分布式動(dòng)力翼半展長(zhǎng)模型對(duì)象Fig.1 Distributed-propulsion-wing half-span model object
1.1 “方-圓”進(jìn)氣道參數(shù)化建模
“方-圓”進(jìn)氣道為上下、左右對(duì)稱曲面,僅需對(duì)其1/4 外形進(jìn)行參數(shù)化即可[31]。如圖2 所示,該“方-圓”進(jìn)氣道主要外形參數(shù)包括進(jìn)口高度hin、進(jìn)口寬度bin、進(jìn)口長(zhǎng)度lin、涵道筒半徑R。為了實(shí)現(xiàn)進(jìn)氣道由方形到圓形的曲面過渡,采用超橢圓方程[34-35]對(duì)其沿流向截面輪廓進(jìn)行參數(shù)化:

圖2 “方-圓”進(jìn)氣道模型Fig.2 “Square-Circle” inlet model
式中:a為超橢圓長(zhǎng)半軸;b為超橢圓短半軸;m為超橢圓指數(shù)。當(dāng)m=2 時(shí)超橢圓方程即為橢圓方程,當(dāng)m>2 且m不斷增大時(shí),橢圓逐漸向矩形過渡。因此,對(duì)于圖2 所示“方-圓”進(jìn)氣道而言,其方形進(jìn)口輪廓的超橢圓方程參數(shù)為a=bin/2、b=hin/2、m=+∞,其圓形出口輪廓的超橢圓方程參數(shù)為a=R、b=R、m=2。
進(jìn)一步采用四階Bezier 曲線[36]對(duì)進(jìn)氣道脊線a(t)、b(t)、m(t)進(jìn)行參數(shù)化:
式中:t為控制參數(shù),t=0~1;(x,ya)、(x,yb)、(x,ym)分別為進(jìn)氣道脊線a(t)、b(t)、m(t)的坐標(biāo)。a(t)曲線控制截面輪廓的超橢圓長(zhǎng)半軸變化,對(duì)應(yīng)控制點(diǎn)為(p1,p6)、(p2,p7)、(p3,p8)、(p4,p9)、(p5,p10);b(t)曲線控制截面輪廓的超橢圓短半軸變化,對(duì)應(yīng)控制點(diǎn)為(p1,p11)、(p2,p12)、(p3,p13)、(p4,p14)、(p5,p15);m(t)曲線控制超截面輪廓的橢圓指數(shù)變化,對(duì)應(yīng)控制點(diǎn)為(p1,p16)、(p2,p17)、(p3,p18)、(p4,p19)、(p5,p20)。
為保證涵道曲面的光滑連續(xù),令進(jìn)氣道方形進(jìn)口處控制曲線與涵道外壁面垂直相接,進(jìn)氣道圓形出口處控制曲線與涵道筒水平相接。根據(jù)Bezier 曲線端點(diǎn)性質(zhì)及導(dǎo)數(shù)性質(zhì)可知
由此該“方-圓”進(jìn)氣道曲面的實(shí)際控制變量共8 個(gè):p2、p3、p8、p9、p13、p14、p18、p19。
進(jìn)一步根據(jù)幾何參數(shù)對(duì)控制變量進(jìn)行單位化處理,令
此時(shí)四階Bezier 曲線x′(t)、y′a(t)、y′b(t)、y′m(t)對(duì)應(yīng)的控制變量為
當(dāng)確定a(t)、b(t)、m(t) 3 條控制曲線后,超橢圓的長(zhǎng)短半軸信息可直接根據(jù)對(duì)應(yīng)的Bezier曲線求得。而超橢圓指數(shù)m則根據(jù)曲線m(t)求解得到。設(shè)曲線m(t)對(duì)應(yīng)的高度hm(t)和bm(t)分別為

在已知ya(t)、yb(t)和ym(t)后,根據(jù)式(19)~式(21)即可求得對(duì)應(yīng)的超橢圓指數(shù)m,繼而自動(dòng)生成相應(yīng)的“方-圓”進(jìn)氣道曲面。
1.2 “圓-方”排氣道參數(shù)化建模
與“方-圓”進(jìn)氣道類似,“圓-方”排氣道采用如圖3 所示外形參數(shù)和a*(t)、b*(t)、m*(t)曲線進(jìn)行定義。其主要外形參數(shù)包括出口高度hout、出口寬度bout、出口長(zhǎng)度lout、涵道筒半徑R。對(duì)于動(dòng)力翼單元而言,排氣道出口寬度bout與進(jìn)氣道進(jìn)口寬度bin相等,即bout=bin。

圖3 “圓-方”排氣道模型Fig.3 “Circle-Square” outlet model
a*(t)、b*(t)、m*(t)曲線控制方程如下:
進(jìn)一步根據(jù)幾何參數(shù)對(duì)控制變量進(jìn)行單位化處理,令
為保證涵道曲面的光滑連續(xù),令排氣道圓形進(jìn)口處控制曲線與涵道筒水平相接,排氣道矩形出口末端保持水平。根據(jù)Bezier 曲線端點(diǎn)性質(zhì)及導(dǎo)數(shù)性質(zhì)可知

1.3 動(dòng)力翼外翼面參數(shù)化建模
考慮動(dòng)力翼外翼面采用常規(guī)機(jī)翼上下翼面,因此采用CST(Class Function/Shape Function Transformation)參數(shù)化方法[37]分別對(duì)上、下曲面的翼型輪廓進(jìn)行參數(shù)化建模,上、下翼型具體表達(dá)式如下:
式中:yTu和yTl分別為翼型上下表面后緣(Trail?ing Edge, TE)的y軸坐標(biāo);C(x)為類函數(shù);Su(x)及Sl(x)為型函數(shù)。
類函數(shù)C(x)中,對(duì)于一般翼型取N1=0.5、N2=1。Aui和Ali為控制點(diǎn),N為Si(x)的階數(shù),這里取N=6。由此動(dòng)力翼外翼上、下表面各有7 個(gè)控制變量。
1.4 分布式動(dòng)力翼模型參數(shù)化描述
綜上,對(duì)于如圖1 所示分布式動(dòng)力翼模型,在保持轉(zhuǎn)動(dòng)部件固定不變的情況下,可以用表1 所列共計(jì)40 個(gè)控制參數(shù)進(jìn)行描述和自動(dòng)曲面造型。

表1 分布式動(dòng)力翼模型參數(shù)定義Table 1 Definitions of distributed-propulsion-wing model parameters
2 數(shù)值模擬方法及計(jì)算模型
2.1 數(shù)值模擬方法
針對(duì)分布式動(dòng)力翼多轉(zhuǎn)子內(nèi)部流動(dòng)與翼面外部流動(dòng)耦合問題,采用耦合k-ω剪切應(yīng)力輸運(yùn)(Shear-Stress Transport, SST)湍流模型[38]求解雷諾平均Navier-Stokes(Reyolds-Averaged Navier-Stokes, RANS)方程的多重參考坐標(biāo)系(Multiple Reference Frame, MRF)準(zhǔn)定常求解方法[39],使用商業(yè)軟件FLUENT 進(jìn)行數(shù)值模擬研究。數(shù)值計(jì)算過程中空間離散采用二階迎風(fēng)MUSCL(Mono?tone Upstream-Centered Scheme for Conserva?tion Laws)插值的Roe 格式,時(shí)間離散與推進(jìn)則采用隱式AF(Approximate Factorization)方法。其中,k-ωSST 湍流模型是一種得到工程廣泛應(yīng)用的兩方程混合模型,它在遠(yuǎn)離壁面純湍流區(qū)域使用標(biāo)準(zhǔn)k-ε模型計(jì)算,在近壁面區(qū)域保留了適用于各種壓力梯度邊界層問題的Wilcoxk-ω模型,魯棒性好。此外,與過分耗費(fèi)計(jì)算資源的非定常求解方法相比較,MRF 準(zhǔn)定常求解方法能夠在更加節(jié)省計(jì)算資源的同時(shí)獲得較高的數(shù)值模擬精度,在定軸旋轉(zhuǎn)體氣動(dòng)計(jì)算中應(yīng)用較為廣泛。
2.2 計(jì)算模型
圖4~圖6 所示為研究所采用的幾種計(jì)算模型。為了表述動(dòng)力翼氣動(dòng)特性隨翼面形狀的變化規(guī)律,在圖1 所示研究對(duì)象的基礎(chǔ)上僅改變涵道外壁面翼型輪廓,共建立具有3 種不同彎度的翼型、單元翼段、整體機(jī)翼進(jìn)行對(duì)比。為避免大彎度翼型與涵道內(nèi)壁相結(jié)合會(huì)造成上翼面過厚、下翼面過薄的情況,僅針對(duì)上、下表面均外凸的小彎度翼型進(jìn)行模擬分析,如圖4~圖6 中各計(jì)算模型命名所示:“base”表示相對(duì)彎度為0 的基準(zhǔn)對(duì)稱翼面,“pc01”表示厚度分布不變、最大相對(duì)彎度增大為2.0%的正彎度翼面,“pc02”表示厚度分布不變、最大相對(duì)彎度增大為4.0%的正彎度翼面;“2D”表示二維,“3D”表示三維;“duct-”表示動(dòng)力翼,“-foil”表示剖面翼型,“-wingsec”表示動(dòng)力翼或機(jī)翼的單元翼段,“-wing”表示分布式動(dòng)力翼或機(jī)翼的整體模型。
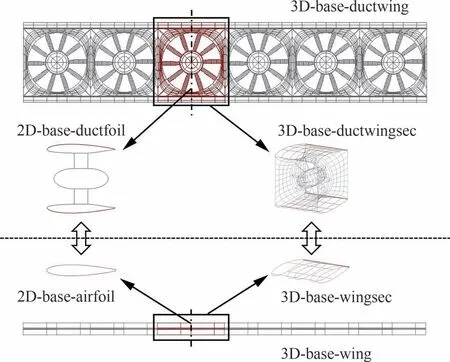
圖4 分布式動(dòng)力翼及常規(guī)機(jī)翼base 模型Fig.4 Distributed-propulsion-wing and traditional wing base model

圖5 分布式動(dòng)力翼及常規(guī)機(jī)翼pc01 模型Fig.5 Distributed-propulsion-wing and traditional wing pc01 model

圖6 分布式動(dòng)力翼及常規(guī)機(jī)翼pc02 模型Fig.6 Distributed-propulsion-wing and traditional wing pc02 model
各計(jì)算模型控制參數(shù)取值如表2 所示,其中base 模 型 給 出 所 有 參 數(shù) 值,pc01 模 型 和pc02 模 型僅給出相對(duì)base 模型發(fā)生改變的參數(shù)值。
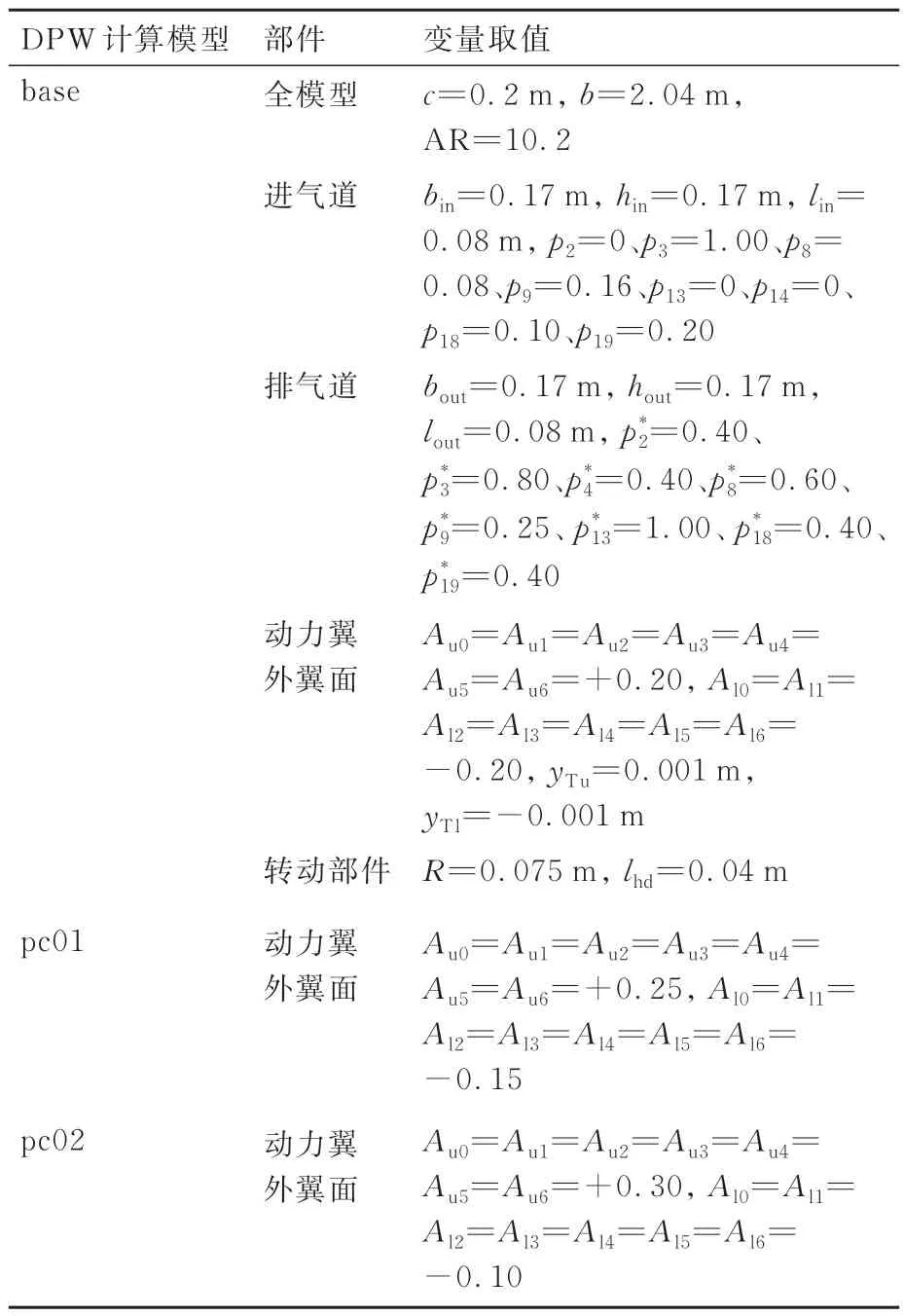
表2 各計(jì)算模型控制參數(shù)取值Table 2 Control variables and their values of each model
2.3 網(wǎng)格無(wú)關(guān)性分析
由于所研究的動(dòng)力翼對(duì)象十分復(fù)雜,在進(jìn)行網(wǎng)格劃分時(shí)就需要考慮數(shù)值計(jì)算的效率與精度。因此,以動(dòng)力翼單元翼段base 模型為對(duì)象,建立3 套稀疏程度不同的計(jì)算網(wǎng)格模型,開展網(wǎng)格無(wú)關(guān)性分析。其中,對(duì)涵道筒包裹的圓柱形轉(zhuǎn)動(dòng)區(qū)域(圖4~圖6 中紅色部分區(qū)域)進(jìn)行非結(jié)構(gòu)網(wǎng)格劃分,圓柱體前后面為交界面,圓柱體周向面即為涵道內(nèi)壁。其次,對(duì)動(dòng)力翼單元翼段模型復(fù)雜幾何進(jìn)行邊界層混合網(wǎng)格生成,在黏性壁面附近布置多層半結(jié)構(gòu)化的三棱柱網(wǎng)格作為邊界層網(wǎng)格,在遠(yuǎn)離壁面的區(qū)域布置非結(jié)構(gòu)化四面體網(wǎng)格,同時(shí)在動(dòng)力翼前后緣處進(jìn)行局部網(wǎng)格加密。此外,將動(dòng)力翼單元翼段兩側(cè)平面設(shè)置為對(duì)稱面以忽略翼尖渦三維效應(yīng),突顯單元特性。
3 套計(jì)算網(wǎng)格基本信息如表3 所示,其主要差異體現(xiàn)在第1 層邊界層網(wǎng)格高度y+、動(dòng)力翼前后緣加密網(wǎng)格尺度、動(dòng)力翼表面網(wǎng)格尺度以及轉(zhuǎn)動(dòng)部件表面網(wǎng)格尺度設(shè)置的不同。
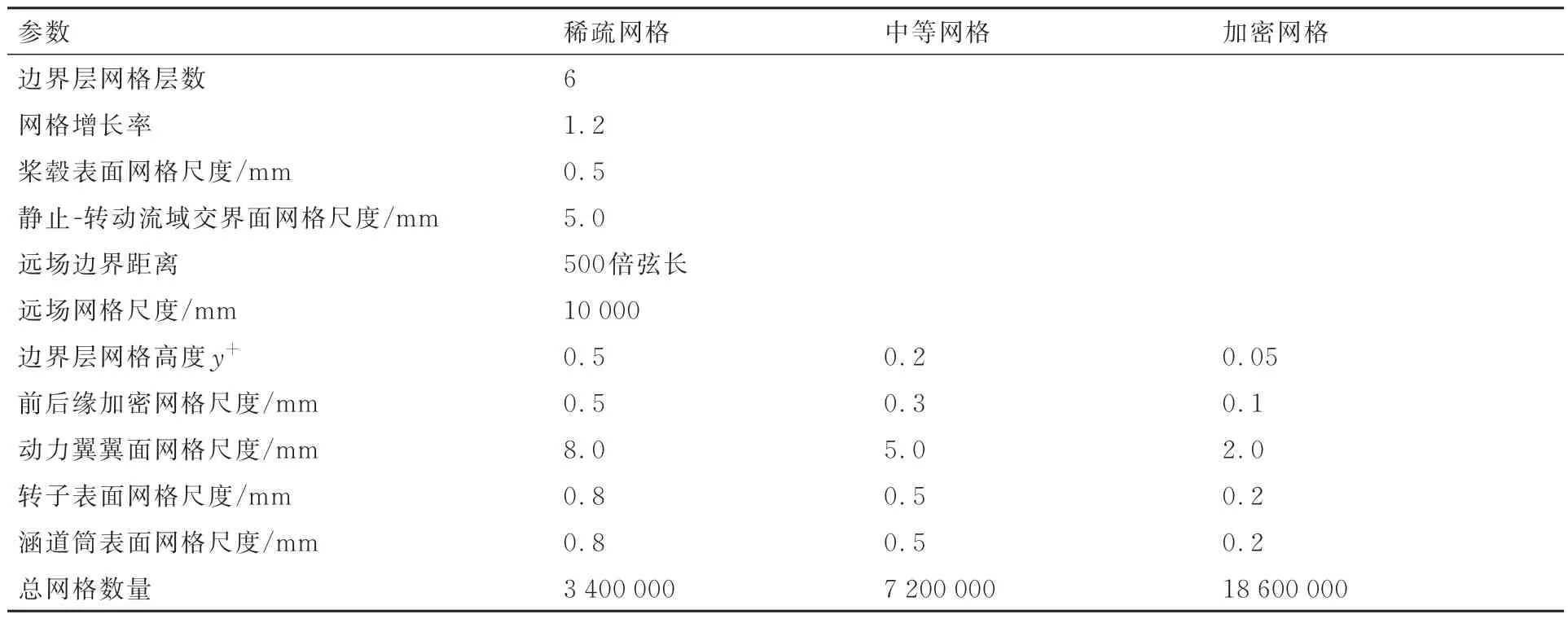
表3 計(jì)算網(wǎng)格信息Table 3 Computational mesh information
選取典型工況進(jìn)行驗(yàn)算,具體計(jì)算狀態(tài)取海拔高度H=0 m、來(lái)流速度V∞=40 m/s、參考面積Sref=0.034 m2、參考展長(zhǎng)bref=0.17 m、 參考弦長(zhǎng)cref=0.2 m、轉(zhuǎn)子速度n=10 000 r/min、迎角α=0°。表4 給出采用3 套網(wǎng)格計(jì)算得到的氣動(dòng)、動(dòng)力特性參數(shù)及求解收斂需用時(shí)間,所有計(jì)算均在同一臺(tái)16 核32 線程64 G 內(nèi)存服務(wù)器中進(jìn)行。可以看出,以加密網(wǎng)格計(jì)算結(jié)果為基準(zhǔn),中等網(wǎng)格計(jì)算誤差很小,始終在2.20%以內(nèi),而計(jì)算耗時(shí)顯著縮短,計(jì)算效率顯著提高;稀疏網(wǎng)格對(duì)于轉(zhuǎn)子拉力、轉(zhuǎn)子扭矩以及動(dòng)力翼升力的計(jì)算誤差相對(duì)較小,始終在6.0%以內(nèi),但對(duì)于動(dòng)力翼阻力計(jì)算誤差十分顯著,達(dá)到23.07%,這與其邊界層網(wǎng)格高度和動(dòng)力翼前后緣加密網(wǎng)格尺度均較大直接關(guān)聯(lián),而在計(jì)算耗時(shí)上相比中等網(wǎng)格并未體現(xiàn)出明顯優(yōu)勢(shì)。因此在后續(xù)研究中將主要采用中等網(wǎng)格設(shè)置參數(shù),進(jìn)行動(dòng)力翼特性數(shù)值模擬。

表4 不同計(jì)算網(wǎng)格計(jì)算結(jié)果及耗時(shí)對(duì)比Table 4 Comparison of simulation results and comput?ing time using different computational meshes
3 分布式動(dòng)力翼動(dòng)力/氣動(dòng)耦合特性
借鑒翼型-機(jī)翼研究思路,由動(dòng)力翼二維剖面翼型到動(dòng)力翼單元翼段,再到分布式動(dòng)力翼整體進(jìn)行數(shù)值模擬及詳細(xì)分析,通過將其二維-單元-整體特性內(nèi)在聯(lián)系與常規(guī)翼型-機(jī)翼進(jìn)行比對(duì),增強(qiáng)對(duì)分布式動(dòng)力翼動(dòng)力/氣動(dòng)耦合特性的認(rèn)識(shí)和理解。
同上進(jìn)行500次仿真實(shí)驗(yàn),分析各層內(nèi)部節(jié)點(diǎn)剩余能量標(biāo)準(zhǔn)差情況,如圖6所示.可以發(fā)現(xiàn),由于越靠近基站的節(jié)點(diǎn)累積工作負(fù)荷較大,經(jīng)過能量捕獲后其總體剩余能量的差異度也相對(duì)明顯,故里層的節(jié)點(diǎn)剩余能量相對(duì)不平衡些,總體上變化趨勢(shì)較為平緩,而小車在同一層各停留點(diǎn)的充電時(shí)間相同,從而證明了分層中繼的均衡式路由策略的穩(wěn)定性.
3.1 動(dòng)力翼二維剖面翼型特性
針對(duì)常規(guī)翼型和動(dòng)力翼剖面翼型的二維氣動(dòng)特性進(jìn)行數(shù)值模擬和對(duì)比分析。圖7給出基準(zhǔn)翼型的計(jì)算網(wǎng)格示意,其中,將第1 層邊界層網(wǎng)格高度y+取為0.2,調(diào)整前后緣網(wǎng)格高度不大于0.3 mm、翼型表面網(wǎng)格高度不大于5.0 mm。為了模擬動(dòng)力轉(zhuǎn)子拉力,在動(dòng)力翼剖面翼型流場(chǎng)“Fluid”中設(shè)置轉(zhuǎn)子流域“Rotor-Fluid”,并基于轉(zhuǎn)子拉力設(shè)置空間均布的動(dòng)量源項(xiàng)進(jìn)行數(shù)值模擬,具體計(jì)算狀態(tài)設(shè)置為H=0 m、V∞=40 m/s、cref=0.2 m、轉(zhuǎn)子拉力T=0,7,10,13 N、α=?4°~16°、Δα=4°。此外,在氣動(dòng)特性分析過程中,對(duì)于動(dòng)力翼剖面翼型忽略其槳轂,僅計(jì)入涵道內(nèi)外壁面氣動(dòng)力。

圖7 二維翼型計(jì)算網(wǎng)格Fig.7 Computational mesh around 2D airfoils
圖8 為不同翼型在無(wú)動(dòng)力影響下的升阻力特性曲線,圖中CL為升力系數(shù),CD為阻力系數(shù)。可以看出,盡管常規(guī)翼型與動(dòng)力翼剖面翼型的升力曲線斜率、零升阻力系數(shù)等差異顯著,但隨著相對(duì)彎度的改變,翼型升阻力變化趨勢(shì)一致,升力曲線斜率、各迎角升力增量、阻力曲線斜率、各迎角阻力增量、大迎角失速特性等均較相近,也就是說(shuō),在所限定的小彎度翼型情況下,常規(guī)翼型隨彎度變化而產(chǎn)生的氣動(dòng)特性變化規(guī)律在動(dòng)力翼剖面翼型上同樣成立。

圖8 二維翼型氣動(dòng)力特性曲線Fig.8 Aerodynamic force curves of 2D airfoils
圖9 為帶彎度pc02 翼型隨著轉(zhuǎn)子拉力增大后的升阻力特性曲線。可以看出,對(duì)于動(dòng)力翼剖面翼型而言,隨著轉(zhuǎn)子拉力不斷增大,α=0°時(shí)升力系數(shù)基本保持不變,但升力線斜率不斷增大,翼型阻力先增大后減小,翼型升阻比則先減小后增大,且翼型在大迎角狀態(tài)下的失速特性隨著動(dòng)力抽吸效應(yīng)和噴流作用對(duì)流動(dòng)的梳理而稍有改善。

圖9 不同轉(zhuǎn)子拉力下二維pc02 翼型氣動(dòng)力特性曲線Fig.9 Aerodynamic force curves of 2D pc02 airfoils at different thrust levels
圖10 為α=0°,4°時(shí)不同拉力下pc02 翼型壓力分布對(duì)比,圖中Cp為壓力系數(shù),為便于分析,也給出常規(guī)翼型壓力分布對(duì)比。可以看出:① 在α=0°下,當(dāng)轉(zhuǎn)子拉力為0 N 時(shí),動(dòng)力翼剖面翼型上、下表面前緣吸力峰值均相比常規(guī)翼型更大;隨著拉力不斷增大,其前緣吸力峰值逐漸減小,壓力分布形態(tài)逐漸趨近于常規(guī)翼型,但受到動(dòng)力內(nèi)流耦合影響,動(dòng)力翼剖面翼型外部流動(dòng)的流速和表面壓力始終相比常規(guī)翼型繞流流速和表面壓力更高和更低。相對(duì)應(yīng)地,動(dòng)力翼剖面翼型上、下表面后緣壓力恢復(fù)值相對(duì)常規(guī)翼型稍小,但隨著轉(zhuǎn)子拉力改變并沒有發(fā)生明顯變化;② 在α=0°迎角下,動(dòng)力翼剖面翼型內(nèi)外流對(duì)應(yīng)的表面壓力分布基本一致。隨著迎角增大,動(dòng)力翼剖面翼型上、下表面前緣吸力峰值均相對(duì)有所增大,動(dòng)力內(nèi)流開始出現(xiàn)軸向不對(duì)稱現(xiàn)象,但各拉力狀態(tài)下轉(zhuǎn)子流域內(nèi)壁的表面壓力值和分布形態(tài)基本一致,這與二維計(jì)算轉(zhuǎn)子拉力直接賦值相關(guān);③ 在轉(zhuǎn)子拉力為0 N 時(shí),不同迎角動(dòng)力翼剖面翼型內(nèi)流對(duì)應(yīng)的低壓值均較小,而隨著拉力不斷增大,動(dòng)力翼剖面翼型整個(gè)內(nèi)壁面區(qū)域的低壓值和低壓范圍均不斷增大,此時(shí)動(dòng)力翼剖面翼型上、下表面前緣吸力對(duì)動(dòng)力抽吸帶來(lái)的低壓區(qū)域發(fā)展呈有利誘導(dǎo);而動(dòng)力翼剖面翼型上、下表面后緣恢復(fù)壓力則對(duì)動(dòng)力噴流低壓區(qū)域發(fā)展有所抑制,這種不對(duì)稱發(fā)展使得在拉力增大到一定程度后,動(dòng)力翼內(nèi)壁面阻力項(xiàng)逐漸轉(zhuǎn)變?yōu)椋ㄘ?fù)阻力)拉力,這也是圖9 中動(dòng)力翼剖面翼型阻力先增大后減小的主要原因。
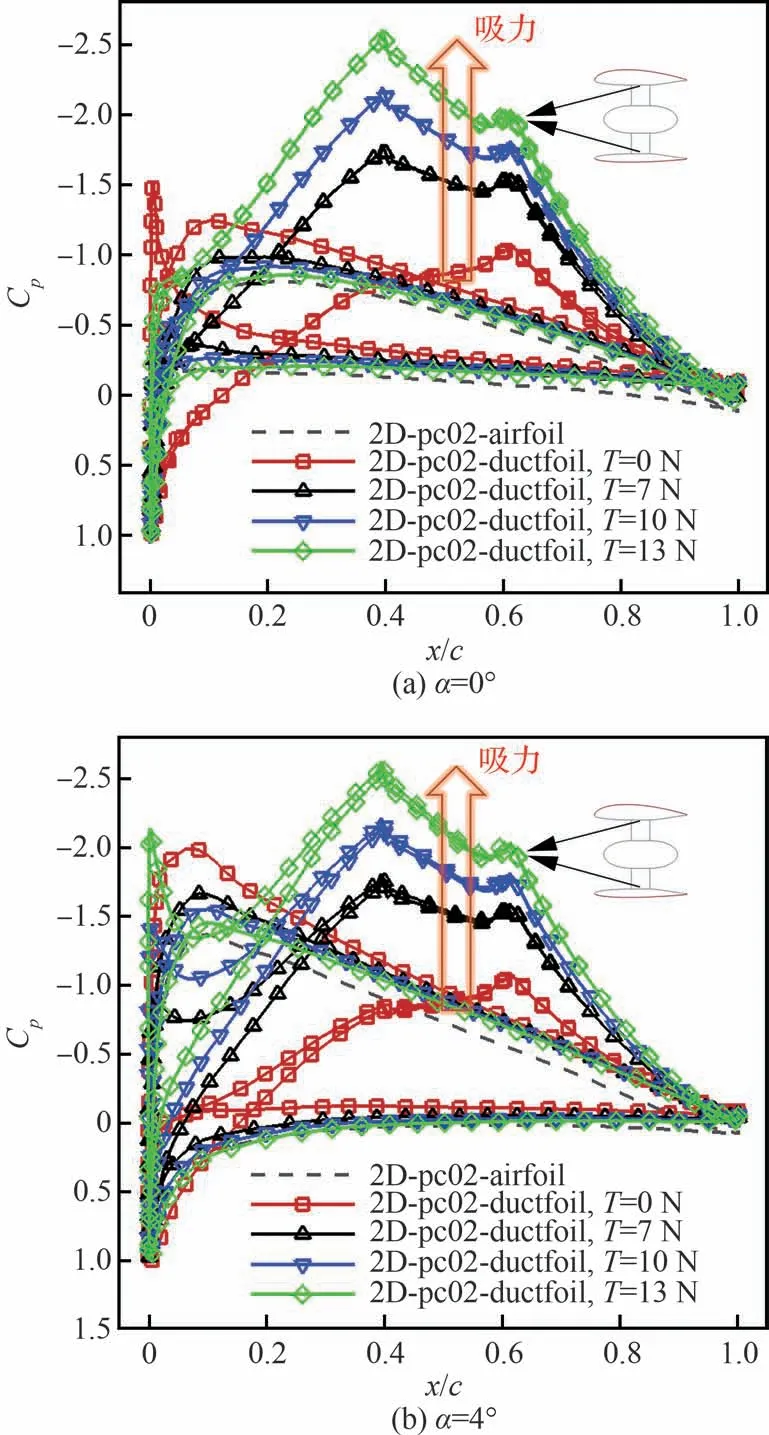
圖10 不同轉(zhuǎn)子拉力下二維pc02 翼型壓力分布對(duì)比Fig.10 Comparison of pressure distributions around 2D pc02 airfoils at different thrust levels
圖11 為迎角α=0°,4°時(shí)動(dòng)力翼不同剖面翼型在相同轉(zhuǎn)子拉力T=10 N 下的壓力分布對(duì)比。可以看出,隨著動(dòng)力翼剖面翼型上下表面輪廓發(fā)生改變,其外部流動(dòng)對(duì)應(yīng)的外壁面壓力分布變化的趨勢(shì)和幅度與常規(guī)翼型壓力分布變化十分相近,而動(dòng)力翼不同剖面翼型內(nèi)流對(duì)應(yīng)的內(nèi)壁面壓力分布始終保持一致。

圖11 相同拉力下不同二維分布式動(dòng)力翼剖面翼型壓力分布對(duì)比Fig.11 Comparison of pressure distributions around dif?ferent 2D distributed-propulsion-wing ductfoils at the same thrust level
3.2 動(dòng)力翼單元翼段特性
進(jìn)一步針對(duì)動(dòng)力翼的單元翼段氣動(dòng)特性進(jìn)行數(shù)值模擬分析。圖12 給出動(dòng)力翼單元翼段的實(shí)體模型多塊網(wǎng)格示意。具體計(jì)算狀態(tài)設(shè)置為H=0 m、V∞=40 m/s、Sref=0.034 m2、bref=0.17 m、cref=0.2 m、n=10 000,11 000,12 000 r/min(對(duì)應(yīng)T=7,10,13 N)、α=?4°~4°、Δα=4°。在氣動(dòng)特性分析過程中對(duì)動(dòng)力翼單元翼段仍忽略其槳轂、轉(zhuǎn)子部件,僅計(jì)入涵道內(nèi)外壁面氣動(dòng)力。
圖13 為轉(zhuǎn)子拉力T=10 N 狀態(tài)各動(dòng)力翼剖面翼型與轉(zhuǎn)子轉(zhuǎn)速n=11 000 r/min 狀態(tài)各動(dòng)力翼單元翼段的氣動(dòng)特性曲線。可以看出:① 由動(dòng)力翼二維剖面翼型到動(dòng)力翼單元翼段,各迎角狀態(tài)下的升力系數(shù)基本一致,這是由于動(dòng)力翼單元翼段實(shí)體具有垂向?qū)ΨQ特征,其涵道內(nèi)壁面壓力上下基本抵消,因此升力特性主要取決于動(dòng)力翼上、下外表面對(duì)應(yīng)的外部流動(dòng);② 動(dòng)力翼單元翼段阻力相比其二維剖面翼型高出近一倍,這是由于動(dòng)力翼單元翼段相比其二維剖面翼型在流向和展向非對(duì)稱延展,尤其是在不同展向站位上,動(dòng)力翼單元翼段的剖面厚度因圓筒涵道垂向高度減小而顯著增大,其摩擦阻力、壓差阻力均顯著增大,而隨著翼型輪廓變化,動(dòng)力翼單元翼段升阻特性發(fā)展趨勢(shì)與二維計(jì)算結(jié)果基本一致。總的來(lái)說(shuō),動(dòng)力翼單元翼段氣動(dòng)特性能夠通過其二維剖面翼型進(jìn)行一定程度上的反映,尤其是在升力預(yù)測(cè)方面具備一定的精準(zhǔn)度。
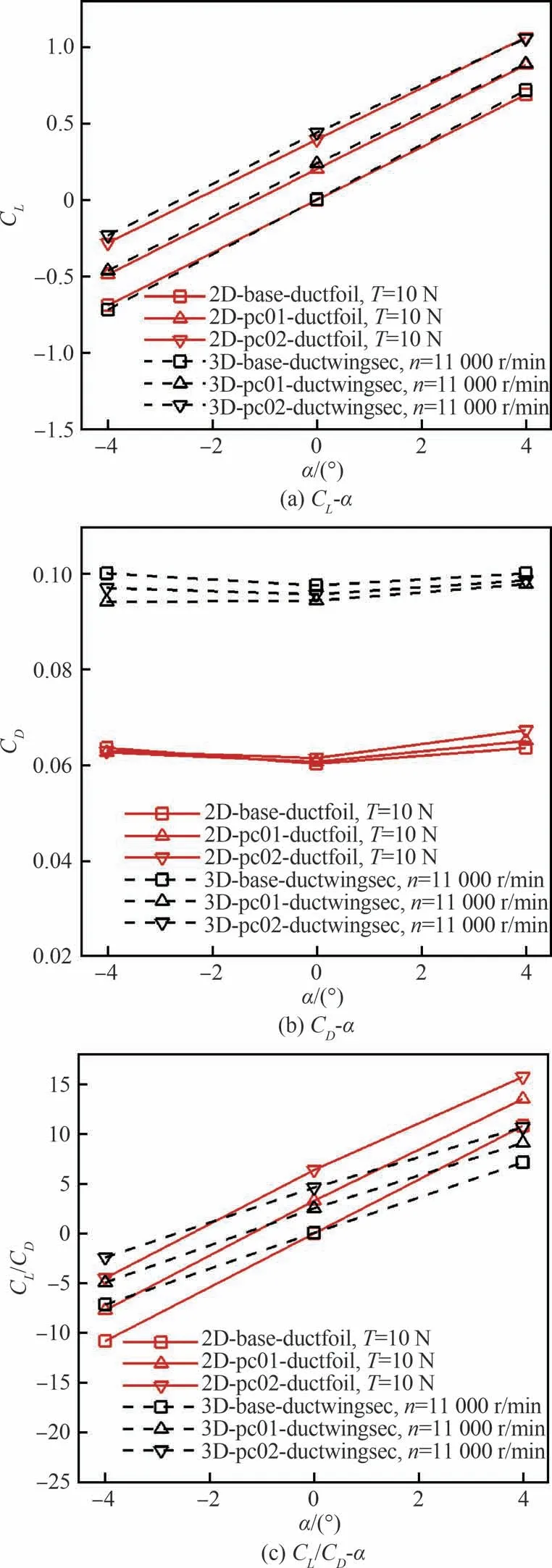
圖13 二維動(dòng)力翼翼型-三維動(dòng)力翼單元翼段氣動(dòng)力特性曲線對(duì)比Fig.13 Comparison of aerodynamic force curves between 2D ductfoils and 3D distributed-propulsion-wing sections
如圖14 所示,截取z=?0.04,0,0.04 m 不同展向站位處的動(dòng)力翼剖面內(nèi)外壁壓力分布進(jìn)行對(duì)比分析。顯然,z=0 m 位置截面翼型與二維剖面翼型一致;而z=±0.04 m 位置截面翼型則由于方轉(zhuǎn)圓進(jìn)氣和圓轉(zhuǎn)方排氣形式與二維剖面翼型輪廓差異顯著,且受轉(zhuǎn)子轉(zhuǎn)動(dòng)方向影響,二者轉(zhuǎn)子流域內(nèi)的葉片截面方向也有所區(qū)別。
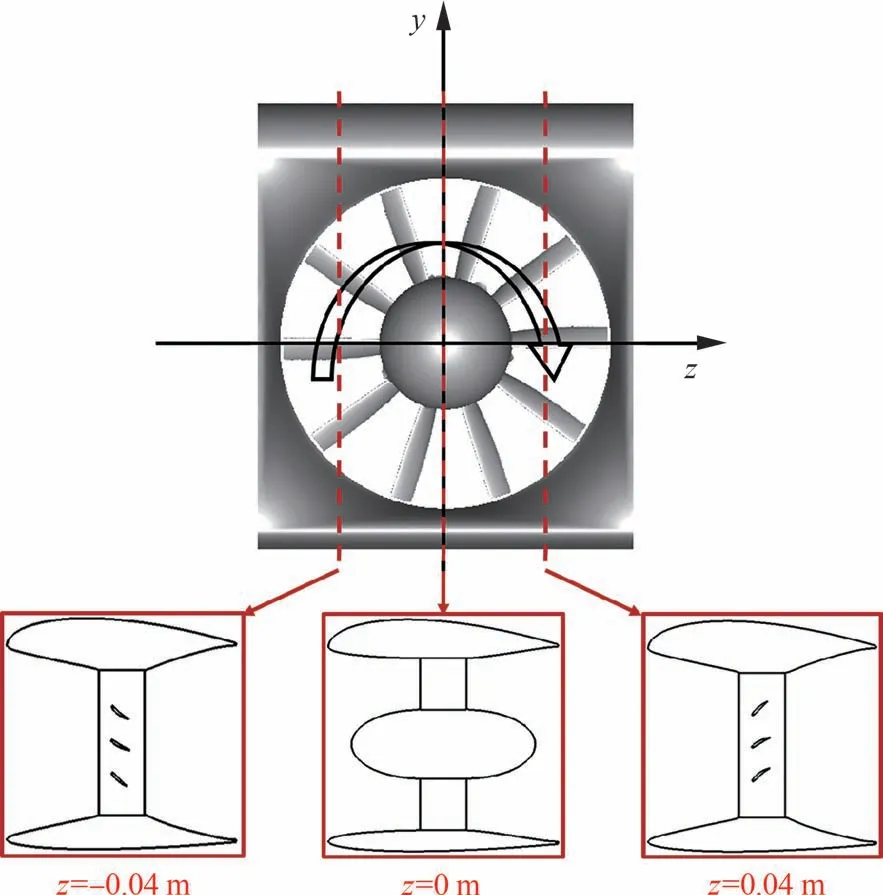
圖14 分布式動(dòng)力翼單元翼段展向截面位置Fig.14 Span-wise locations of distributed-propulsionwing section
圖15 為迎角α=0°、不同轉(zhuǎn)速狀態(tài)pc02 動(dòng)力翼單元翼段z=0 m 截面處翼型壓力分布對(duì)比,為便于分析,圖中也給出動(dòng)力翼二維剖面翼型在不同轉(zhuǎn)子拉力下的壓力分布。可以看出:① 三維動(dòng)力翼單元在轉(zhuǎn)子前后的逆壓梯度相比二維剖面翼型結(jié)果更大,盡管其轉(zhuǎn)子流域內(nèi)低壓峰值及其隨轉(zhuǎn)速(拉力)變化趨勢(shì)與二維剖面翼型結(jié)果基本一致,但其轉(zhuǎn)子流域上、下游受抽吸和噴流影響下的涵道內(nèi)壁壓力值始終相對(duì)二維剖面翼型結(jié)果較高,也就是說(shuō),二維計(jì)算對(duì)動(dòng)力抽吸效應(yīng)和噴流加速效應(yīng)的預(yù)測(cè)均過于樂觀,這與其所采用動(dòng)量源項(xiàng)設(shè)置對(duì)轉(zhuǎn)子拉力的平均化處理相關(guān),而相對(duì)地,采用實(shí)體模型旋轉(zhuǎn)設(shè)置的三維計(jì)算對(duì)轉(zhuǎn)子前后的流動(dòng)差異描述更加準(zhǔn)確和真實(shí);② 涵道三維動(dòng)力翼單元內(nèi)流耦合下的外壁面壓力相比二維剖面翼型始終更低,但其上、下前緣吸力峰值隨轉(zhuǎn)速(拉力)變化趨勢(shì)、變化幅度以及壓力分布輪廓所圍成的面積均與二維剖面翼型結(jié)果較為一致,這也是圖13(a)中升力一致的主要原因。

圖15 不同轉(zhuǎn)速狀態(tài)pc02 分布式動(dòng)力翼單元翼段z=0 m 展向截面翼型壓力分布對(duì)比(α=0°)Fig.15 Comparison of pressure distributions around spanwise section of pc02 distributed-propulsion-wing section at z=0 m among different rotational speed states (α=0°)

圖16 三維pc02 分布式動(dòng)力翼單元翼段不同展向截面翼型壓力分布對(duì)比(n=11 000 r/min, α=0°)Fig.16 Comparison of pressure distributions around 3D pc02 distributed-propulsion-wing section at differ?ent span-wise locations (n=11 000 r/min, α=0°)

圖17 pc02 分布式動(dòng)力翼單元翼段表面壓力及三維流線分布(n=11 000 r/min, α=0°)Fig.17 Surface pressure and 3D streamline distribu?tions around pc02 distributed-propulsion-wing section (n=11 000 r/min, α=0°)
3.3 分布式動(dòng)力翼整體特性
進(jìn)一步針對(duì)分布式動(dòng)力翼整體氣動(dòng)特性進(jìn)行數(shù)值模擬分析。圖18 給出分布式動(dòng)力翼半展長(zhǎng)模型的多塊網(wǎng)格示意,其在轉(zhuǎn)子流域劃分、邊界層網(wǎng)格高度設(shè)置、局部網(wǎng)格加密設(shè)置、氣動(dòng)力計(jì)算設(shè)置等方面均與動(dòng)力翼單元翼段計(jì)算網(wǎng)格保持一致。具體計(jì)算狀態(tài)設(shè)置為H=0 m、V∞=40 m/s、Sref=0.204 m2、bref=1.02 m、cref=0.2 m、n=10 000,11 000,12 000 r/min、α=?4°~4°、Δα=4°。

圖18 三維分布式動(dòng)力翼半展長(zhǎng)模型計(jì)算網(wǎng)格Fig.18 Computational mesh around 3D distributedpropulsion-wing half-span model
考慮到分布式動(dòng)力翼整體可以看作多個(gè)動(dòng)力翼單元翼段沿展向的均勻排布,從動(dòng)力角度出發(fā),如圖19 所示,以動(dòng)力翼單元翼段的推力、扭矩、推進(jìn)效率為基準(zhǔn),對(duì)比分析迎角α=0°、轉(zhuǎn)子轉(zhuǎn)速n=11 000 r/min 狀態(tài)下pc02 分布式動(dòng)力翼各單元模塊沿展向的推進(jìn)特性分布曲線。可以看出,分布式動(dòng)力翼相比基準(zhǔn)單元翼段推力特性發(fā)生顯著改變,扭矩分布相對(duì)較大但十分接近,推進(jìn)效率則明顯降低。其中分布式動(dòng)力翼內(nèi)側(cè)單元始終受到相鄰動(dòng)力抽吸誘導(dǎo),致使其進(jìn)氣流速局部有所增大,動(dòng)力翼推力相比基準(zhǔn)值降低約6.8%,推進(jìn)效率相比基準(zhǔn)值降低約7.7%,而分布式動(dòng)力翼最外側(cè)單元由于受到翼尖渦影響的同時(shí)還需要額外克服最外端表面的摩擦阻力,故其單元推力相比基準(zhǔn)值降低達(dá)22.10%,推進(jìn)效率亦相比基準(zhǔn)值降低約23.10%。

圖19 pc02 分布式動(dòng)力翼展向推進(jìn)特性分布對(duì)比(n=11 000 r/min, α=0°)Fig.19 Comparison of span-wise propulsive properties distributed on pc02 distributed-propulsion-wing(n=11 000 r/min, α=0°)
從機(jī)翼角度出發(fā),如圖20 所示,以動(dòng)力翼單元翼段的升阻力為基準(zhǔn),分析迎角α=0°、轉(zhuǎn)子轉(zhuǎn)速n=11 000 r/min 狀態(tài)下pc02 分布式動(dòng)力翼各單元模塊沿展向的升阻特性分布曲線,為便于分析,亦給出相同來(lái)流狀態(tài)下pc02 常規(guī)機(jī)翼的展向升阻特性分布曲線,同時(shí)對(duì)展向分布的升阻力進(jìn)行歸一化處理,圖中L/Lref、D/Dref分別代表構(gòu)型升力、阻力與基準(zhǔn)升力、阻力之比。可以看出,分布式動(dòng)力翼受翼尖渦效應(yīng)影響后的展向升阻力分布變化趨勢(shì)與常規(guī)機(jī)翼基本一致,并未受分布式動(dòng)力內(nèi)流耦合影響而有明顯的改善或惡化。
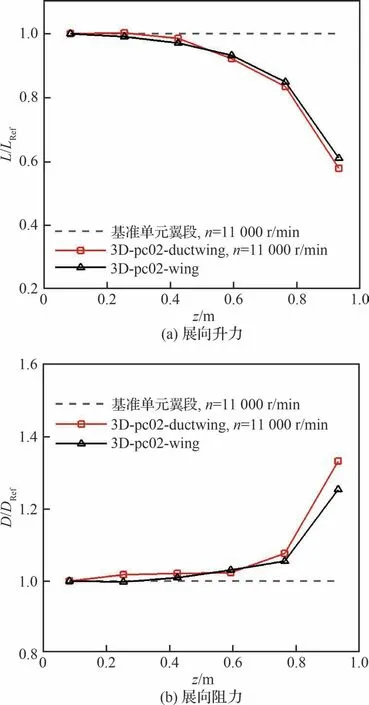
圖20 pc02分布式動(dòng)力翼展向氣動(dòng)力分布對(duì)比(α=0°)Fig.20 Comparison of span-wise aerodynamic force distributed on pc02 distributed-propulsion-wing(α=0°)
圖21 和圖22 分別為與迎角α=0°、轉(zhuǎn)子轉(zhuǎn)速n=11 000 r/min 狀態(tài)下pc02 常規(guī)機(jī)翼和pc02 分布式動(dòng)力翼表面壓力分布和三維空間流線分布示意,其中顯示三維空間流線分布的區(qū)域保持一致。可以看出,分布式動(dòng)力翼上下游空間流線分布特征與圖17 中動(dòng)力翼單元翼段相似,而值得注意的是,分布式動(dòng)力翼尾跡并未出現(xiàn)如常規(guī)機(jī)翼一般明顯的下洗現(xiàn)象,這主要取決于分布式動(dòng)力噴流影響。
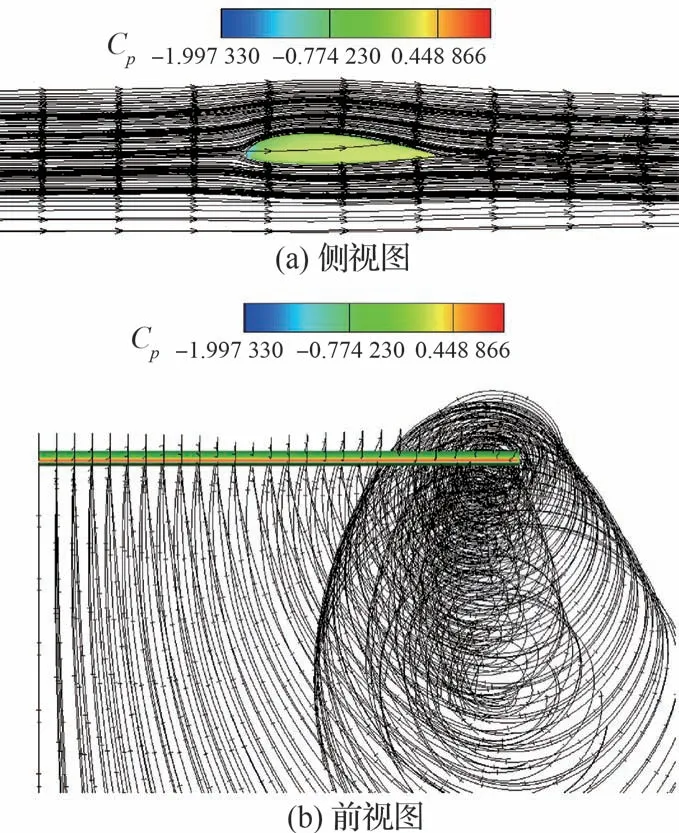
圖21 pc02 常規(guī)機(jī)翼表面壓力及三維流線分布(n=11 000 r/min, α=0°)Fig.21 Surface pressure and 3D streamline distributions around pc02 traditional wing (n=11 000 r/min,α=0°)
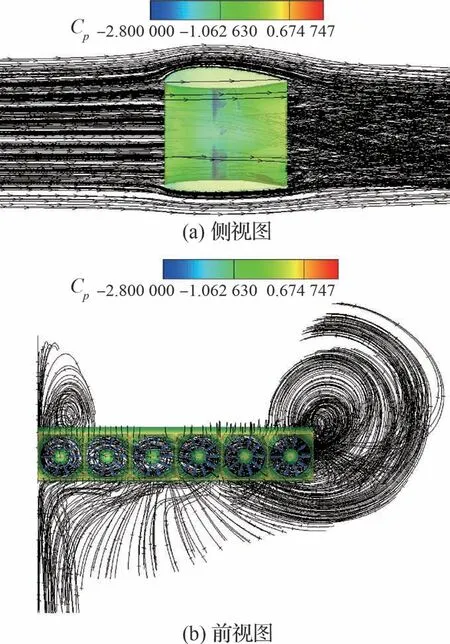
圖22 pc02 分布式動(dòng)力翼表面壓力及三維流線分布(n=11 000 r/min, α=0°)Fig.22 Surface pressure and 3D streamline distribu?tions around pc02 distributed-propulsion-wing(n=11 000 r/min, α=0°)
進(jìn)一步截取pc02 分布式動(dòng)力翼各單元中心截面翼型壓力分布進(jìn)行對(duì)比分析,結(jié)果如圖23 所示,其中z坐標(biāo)值由小到大表示分布式動(dòng)力翼單元由內(nèi)側(cè)向外側(cè),為便于分析,亦給出動(dòng)力翼單元翼段中心截面的翼型壓力分布。可以看出,分布式動(dòng)力翼各單元?jiǎng)恿?nèi)流對(duì)應(yīng)的涵道內(nèi)壁面壓力分布基本一致,且與動(dòng)力翼單元翼段相應(yīng)的壓力分布吻合良好,但分布式動(dòng)力翼各單元外部流動(dòng)存在明顯差異,表現(xiàn)為上翼面前緣吸力峰值由內(nèi)側(cè)到外側(cè)小幅度減小,直至最外側(cè)單元顯著減小,而下翼面壓力值則由內(nèi)側(cè)到外側(cè)逐漸增大。
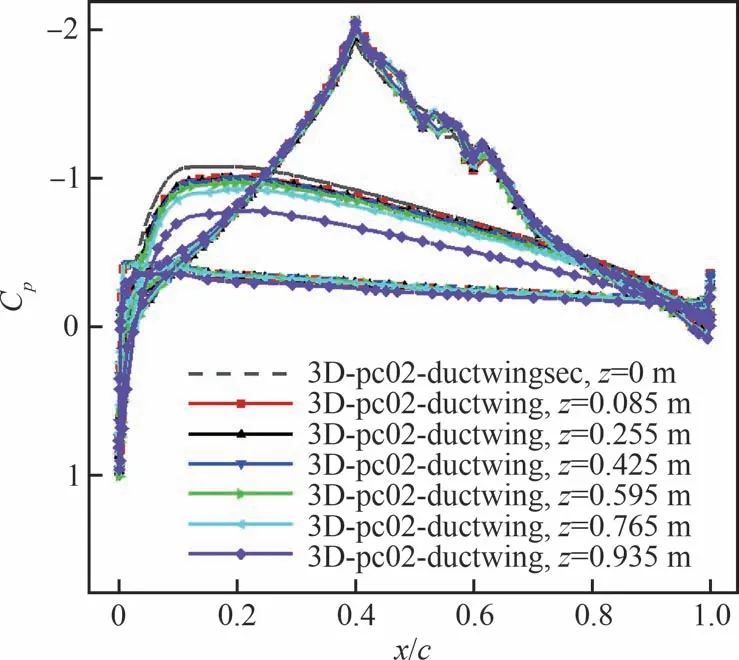
圖23 pc02 分布式動(dòng)力翼各單元中心截面翼型壓力分布對(duì)比(n=11 000 r/min, α=0°)Fig.23 Comparison of pressure distributions around pc02 distributed-propulsion-wing at center sections of each rotor (n=11 000 r/min, α=0°)
4 分布式動(dòng)力翼復(fù)雜對(duì)象設(shè)計(jì)思路
1) 從設(shè)計(jì)角度來(lái)看,分布式動(dòng)力翼具有較為顯著的單元特性,其整體與單元之間關(guān)系與常規(guī)機(jī)翼-翼型較為類似,尤其是在受翼尖渦影響時(shí),沿展向分布各單元翼段升力變化趨勢(shì)與幅度均與常規(guī)機(jī)翼-翼型基本一致,這無(wú)疑對(duì)于分布式動(dòng)力翼復(fù)雜對(duì)象的氣動(dòng)外形設(shè)計(jì)是有利的,可以等效為忽略翼尖渦效應(yīng)的動(dòng)力翼單元設(shè)計(jì)問題。此外,受動(dòng)力噴流影響,尾流下洗效應(yīng)變?nèi)酰@在采用鴨式布局或串列翼布局的飛行器設(shè)計(jì)過程中需要著重考慮。
2) 從動(dòng)力/氣動(dòng)耦合來(lái)看,分布式動(dòng)力翼內(nèi)外流之間相互影響主要體現(xiàn)在動(dòng)力轉(zhuǎn)子工作狀態(tài)下形成的內(nèi)流低壓區(qū)域與動(dòng)力翼外翼面壓力分布之間的相互作用,其中外翼面前緣吸力對(duì)動(dòng)力轉(zhuǎn)子抽吸下的低壓區(qū)域發(fā)展起到有利誘導(dǎo)作用,而后緣壓力恢復(fù)對(duì)動(dòng)力噴流下的低壓區(qū)域發(fā)展起到抑制作用。此外,相鄰動(dòng)力之間也存在一定的誘導(dǎo)作用,主要影響各動(dòng)力單元進(jìn)氣條件,包括局部流速、局部迎角等,這會(huì)導(dǎo)致分布式動(dòng)力翼各單元的推力和推進(jìn)效率相比獨(dú)立動(dòng)力單元均稍有降低。總的來(lái)說(shuō),分布式動(dòng)力翼升阻特性與外翼面輪廓、動(dòng)力拉力、內(nèi)外流耦合等密切關(guān)聯(lián),而以本文動(dòng)力翼內(nèi)壁面進(jìn)行對(duì)稱簡(jiǎn)化處理的研究對(duì)象為例,其升力特性主要取決于外翼面翼型輪廓,阻力特性則主要取決于內(nèi)壁面輪廓、動(dòng)力拉力以及內(nèi)外流耦合強(qiáng)度,尤其在大拉力內(nèi)外流耦合強(qiáng)的狀態(tài)下,動(dòng)力翼阻力特性會(huì)發(fā)生本質(zhì)改變。
基于上述理解,借鑒傳統(tǒng)飛行器拆分解耦設(shè)計(jì)思路,提出如圖24 所示的分布式動(dòng)力翼動(dòng)力/氣動(dòng)一體化設(shè)計(jì)思路:① 基于分布式動(dòng)力翼顯著的單元特性,將其動(dòng)力/氣動(dòng)耦合下的升推一體設(shè)計(jì)問題等效為動(dòng)力翼單元翼段升推一體設(shè)計(jì)問題;② 根據(jù)動(dòng)力內(nèi)外流與升力、推進(jìn)(阻力)特性之間關(guān)系,取動(dòng)力翼剖面翼型進(jìn)行升力特性調(diào)控,取“方-圓”進(jìn)氣道和“圓-方”排氣道進(jìn)行推進(jìn)(阻力)特性調(diào)控,二者之間相互耦合但又相對(duì)獨(dú)立;③ 考慮動(dòng)力翼剖面翼型氣動(dòng)變化規(guī)律與常規(guī)翼型相近,故將其設(shè)計(jì)問題簡(jiǎn)化為常規(guī)翼型的二維曲線設(shè)計(jì)問題,考慮“方-圓”進(jìn)氣道和“圓-方”排氣道在參數(shù)化建模方面均主要依靠進(jìn)口高度、出口高度和3 條控制曲線對(duì)進(jìn)氣段收縮率、排氣段擴(kuò)張率以及進(jìn)排氣段曲面進(jìn)行調(diào)控,故將進(jìn)氣道各控制曲線末端與對(duì)應(yīng)的排氣道控制曲線初端采用直線段連接,進(jìn)而將三維曲面設(shè)計(jì)問題拆解為存在一定內(nèi)在關(guān)系的3 條控制曲線的二維設(shè)計(jì)問題。

圖24 分布式動(dòng)力翼設(shè)計(jì)思路Fig.24 Distributed-propulsion-wing design thread
采用上述思路即可將分布式動(dòng)力翼這一復(fù)雜對(duì)象的動(dòng)力/氣動(dòng)耦合設(shè)計(jì)問題拆解為一個(gè)常規(guī)二維翼型設(shè)計(jì)問題和一個(gè)包含3 條控制曲線多任務(wù)并行的設(shè)計(jì)問題,將特殊問題趨于常規(guī),進(jìn)而達(dá)到顯著提高設(shè)計(jì)效率、確保工程可實(shí)現(xiàn)的目的。然而,該設(shè)計(jì)思路的缺點(diǎn)在于設(shè)計(jì)過程存在過多的等效和簡(jiǎn)化處理,因此其有效性和可行性將主要取決于設(shè)計(jì)人員先驗(yàn)知識(shí)的準(zhǔn)確性,而且在迭代設(shè)計(jì)過程中將很大程度上依賴于人工干預(yù),需要在后續(xù)研究工作中增加反向驗(yàn)證和對(duì)比分析。
5 結(jié) 論
針對(duì)分布式動(dòng)力翼動(dòng)力/氣動(dòng)耦合問題,以進(jìn)氣道、排氣道、外翼面等部件分解的方式建立了分布式動(dòng)力翼復(fù)雜對(duì)象的參數(shù)化模型,采用耦合k-ωSST 湍流模型求解RANS 方程的MRF 方法,借鑒常規(guī)翼型-機(jī)翼思路,由動(dòng)力翼二維剖面翼型到動(dòng)力翼單元翼段,再到分布式動(dòng)力翼整體,進(jìn)行了動(dòng)力/氣動(dòng)耦合下的升力、阻力及推進(jìn)特性分析,通過對(duì)小彎度分布式動(dòng)力翼模型的對(duì)比研究,形成結(jié)論如下:
1) 分布式動(dòng)力翼具有較為顯著的單元特性,其整體與單元之間關(guān)系與常規(guī)機(jī)翼-翼型較為類似,尤其是在受翼尖渦影響時(shí),沿展向分布各單元翼段升力變化趨勢(shì)與幅度均與常規(guī)機(jī)翼-翼型基本一致。此外,分布式動(dòng)力翼升力特性主要取決于動(dòng)力翼單元翼段上、下表面對(duì)應(yīng)的外部流動(dòng)形態(tài),推進(jìn)(阻力)特性則取決于進(jìn)排氣道、涵道內(nèi)壁對(duì)應(yīng)的動(dòng)力內(nèi)部流動(dòng)形態(tài)以及內(nèi)外流耦合強(qiáng)度。
2) 升力特性方面,由于本文動(dòng)力翼內(nèi)壁面進(jìn)行對(duì)稱簡(jiǎn)化處理,在不同來(lái)流和迎角狀態(tài)下動(dòng)力翼內(nèi)壁壓力在一定程度上始終上下相抵,這使得動(dòng)力翼單元翼段的升力特性曲線與動(dòng)力翼二維剖面翼型升力曲線始終吻合良好。其次,對(duì)于動(dòng)力翼單元翼段的中心截面翼型而言,隨著轉(zhuǎn)子拉力增大,動(dòng)力內(nèi)外流耦合效應(yīng)增強(qiáng),其上、下前緣吸力峰值會(huì)明顯減小,而后緣恢復(fù)壓力則會(huì)稍有降低,而與二維剖面翼型相比較,其上、下前緣吸力峰值隨轉(zhuǎn)速(拉力)變化趨勢(shì)、變化幅度以及壓力分布輪廓特征等均較為一致。此外,對(duì)于非中心截面翼型而言,其受轉(zhuǎn)子旋轉(zhuǎn)影響帶來(lái)的上下洗特征并不明顯,翼段左右截面壓力分布近似對(duì)稱。
3) 在推進(jìn)(阻力)特性方面,動(dòng)力翼單元翼段不同展向站位截面翼型內(nèi)部流動(dòng)對(duì)應(yīng)的壓力分布差異顯著,這主要是因?yàn)槭艿健胺?圓”進(jìn)氣道和“圓-方”排氣道曲面造型影響,不同展向站位截面翼型內(nèi)壁面輪廓的進(jìn)氣收縮與排氣擴(kuò)張均相比中心截面翼型發(fā)生改變,且在轉(zhuǎn)子流域邊界位置存在明顯的拐點(diǎn),致使對(duì)應(yīng)區(qū)域壁面壓力存在尖峰。顯然,“方-圓”進(jìn)氣道和“圓-方”排氣道的控制曲線是決定動(dòng)力翼單元翼段推進(jìn)(阻力)特性的關(guān)鍵。此外,動(dòng)力拉力變化會(huì)直接影響動(dòng)力翼內(nèi)壁面區(qū)域的低壓值和低壓范圍,且動(dòng)力翼外流前緣吸力對(duì)動(dòng)力內(nèi)流低壓區(qū)域發(fā)展呈有利誘導(dǎo),而動(dòng)力翼外流后緣壓力恢復(fù)則對(duì)動(dòng)力內(nèi)流低壓區(qū)域發(fā)展有所抑制,這種弦向不對(duì)稱發(fā)展使得在拉力增大到一定程度后,動(dòng)力翼內(nèi)壁面阻力項(xiàng)將逐漸轉(zhuǎn)變?yōu)椋ㄘ?fù)阻力)拉力,對(duì)應(yīng)動(dòng)力翼阻力特性將發(fā)生本質(zhì)改變。
4) 基于對(duì)小彎度翼型情況下的分布式動(dòng)力翼動(dòng)力/氣動(dòng)耦合特性的理解和認(rèn)識(shí),借鑒傳統(tǒng)飛行器拆分解耦設(shè)計(jì)思路,提出“利用分布式動(dòng)力翼顯著的單元特性將復(fù)雜對(duì)象等效為動(dòng)力翼單元翼段,同時(shí)將動(dòng)力翼外流與升力特性對(duì)應(yīng)、內(nèi)流與阻力(推進(jìn))特性對(duì)應(yīng),相對(duì)獨(dú)立地進(jìn)行調(diào)控,最終將復(fù)雜三維曲面設(shè)計(jì)拆解為常規(guī)翼型輪廓設(shè)計(jì)和存在一定內(nèi)在關(guān)系的多條控制曲線的二維設(shè)計(jì)問題予以解決”的設(shè)計(jì)思路。后續(xù)將進(jìn)一步對(duì)大彎度翼型情況下的分布式動(dòng)力翼動(dòng)力/氣動(dòng)耦合特性進(jìn)行深入研究,分析本文相關(guān)理解和認(rèn)識(shí)的普適性,同時(shí)也將結(jié)合具體算例對(duì)采用上述思路開展分布式動(dòng)力翼設(shè)計(jì)的有效性和可行性進(jìn)行驗(yàn)證。

- 航空學(xué)報(bào)的其它文章
- 超臨界二氧化碳渦輪升速過渡中密封-轉(zhuǎn)子系統(tǒng)的動(dòng)力學(xué)行為
- 分布式粗糙元對(duì)高超聲速邊界層不穩(wěn)定性的影響試驗(yàn)
- 兼顧多模式的核心機(jī)驅(qū)動(dòng)風(fēng)扇級(jí)氣動(dòng)設(shè)計(jì)方法
- 樹脂基復(fù)合材料在民用航空發(fā)動(dòng)機(jī)中的應(yīng)用與關(guān)鍵技術(shù)研究進(jìn)展
- 數(shù)據(jù)驅(qū)動(dòng)的曲面構(gòu)件形狀?拓?fù)鋮f(xié)同優(yōu)化方法
- 焊絲超聲振動(dòng)對(duì)鋁合金熔化極氣體保護(hù)焊縫成形及氣孔的影響