月球車與月壤交互作用的離散元-多體動力學耦合建模
2024-03-02 02:25:30劉錦陽
振動與沖擊 2024年4期
徐 鴻, 雷 波, 劉錦陽
(上海交通大學 船舶海洋與建筑工程學院,上海 200240)
顆粒物質(zhì)廣泛存在于大自然中,如沙土、塵埃和稻谷等形狀細小且分散的固體物質(zhì)[1-2]。顆粒物質(zhì)與人類的生產(chǎn)活動具有密切的關(guān)聯(lián),研究顆粒材料的介觀與宏觀性質(zhì)對指導生產(chǎn)活動具有重要意義。為了描述離散單元之間的相互作用,基于離散元方法(discrete element method, DEM)[3]的數(shù)值仿真分析成為主要的研究手段之一,成為研究微觀機理和宏觀現(xiàn)象的有力工具。
在工程實際中,離散顆粒物質(zhì)通常與周圍環(huán)境相互作用,形成復雜的力學系統(tǒng),呈現(xiàn)出復雜的力學特性,使其成為眾多學科研究的熱點之一。在機器人領(lǐng)域,適用于極端沙漠環(huán)境的仿生機器人已經(jīng)引起了人們的廣泛關(guān)注,如淺灘中游泳的蛇形機器人[4]、蜥蜴類仿生機器人[5-6]以及沙漠行走機器人[7-9]等。機器人與顆粒物質(zhì)的相互作用研究揭示了二者之間的關(guān)聯(lián),對指導設(shè)計機器人機構(gòu)有著重要指導意義。在航天領(lǐng)域,尤其是深空勘探中,需要研究地外星體的土壤特性,以設(shè)計出合理的航天任務(wù)計劃。研究著陸器[10]、月壤鉆取裝置、采樣車等對象與土壤顆粒之間的相互作用對于順利開展航天任務(wù)有著至關(guān)重要的作用。
對于多體系統(tǒng)和顆粒系統(tǒng)之間的相互作用,可以采取工程試驗或數(shù)值仿真開展研究。在某些情況下,開展工程試驗存在困難,建立數(shù)值仿真模型是準確模擬這類顆粒物質(zhì)與機械機構(gòu)相互作用過程的有效途徑。在不同的領(lǐng)域中,已經(jīng)發(fā)展出了不同的耦合建模方法和數(shù)值算法,如用于描述多剛體系統(tǒng)與顆粒系統(tǒng)相互作用的多體系統(tǒng)-離散元耦合模型[11-13](multi-body dynamics-discrete element method,MBD-DEM)、模擬變形體與顆粒作用過程的有限元-離散元耦合模型(finite element method-discrete element method, FEM-DEM)以及使用光滑粒子流體動力學(smoothed particle hydrodynamics, SPH)方法模擬顆粒物質(zhì)與多體系統(tǒng)相互作用的建模方法[14-15]。以DEM為代表的耦合模型具有更加高的精確性;以SPH為代表的建模方法具有更加高的效率。Rakhsha等[16]從多體和流體兩個視角闡明了兩種方法中顆粒流的參數(shù)之間的對應(yīng)關(guān)系,對未來選擇何種仿真手段來模擬顆粒介質(zhì)具有重要的影響。
為了實現(xiàn)多體動力學和離散元的耦合仿真計算,有學者開發(fā)出如Adams/EDEM, RecurDyn/EDEM等協(xié)同仿真系統(tǒng)。雖然該耦合策略可行,但其跨平臺間的數(shù)據(jù)傳輸存在一定的效率問題。Radjai等[17-18]通過耦合兩個系統(tǒng)之間的動力學方程,采用高斯-塞德爾方法迭代求解狀態(tài)變量,從而將兩個系統(tǒng)的運動通過相互作用聯(lián)系起來。這是一種強耦合的建模方法,采用優(yōu)化算法進行迭代求解,具有較高的精度,但因收斂問題需要進行較長時間的迭代計算,從而導致仿真效率較低。對于大規(guī)模顆粒系統(tǒng)和多體系統(tǒng)之間的耦合計算,通常采用一種順序求解過程,這是一種弱耦合策略。梁紹敏[19]建立了MBD-FEM-DEM的聯(lián)合仿真模型,給出了有限元與離散元的耦合截面處理方法以及協(xié)同仿真的數(shù)據(jù)傳輸方式,并對著陸器在月壤的著陸性能進行了研究。Sanborn等[20]使用順序耦合策略制定了標準顆粒接口(standard particle interface,SPI)將離散元程序與商業(yè)軟件RecurDyn進行耦合。Wu等[21-22]利用該弱耦合策略對離散元和機械系統(tǒng)進行了耦合計算,并對機械裝置的減震效果進行了研究。
總的來說,目前關(guān)于顆粒物質(zhì)與多體系統(tǒng)的耦合研究還不夠完善。對于耦合系統(tǒng)的仿真模擬需要依靠多平臺協(xié)作,而平臺之間的數(shù)據(jù)傳輸是影響計算效率的瓶頸。此外,耦合系統(tǒng)中物體的形狀都比較規(guī)則,對于復雜形狀的物體的碰撞檢測研究開展較少,對于非光滑形狀的物體的局部檢測效率較低,有必要提出一種提高局部檢測效率的方法。
本文的工作重點是建立復雜形狀多體系統(tǒng)和顆粒系統(tǒng)耦合動力學模型,提出非光滑形狀物體與顆粒之間的高效局部接觸檢測方法,并搭建多體系統(tǒng)和顆粒系統(tǒng)之間的耦合計算框架,實現(xiàn)同一個計算平臺上進行耦合動力學仿真分析的功能。首先給出了顆粒系統(tǒng)的離散元建模方法、含約束多剛體系統(tǒng)笛卡爾建模方法以及耦合系統(tǒng)建模方法。然后用均勻網(wǎng)格進行全局檢測,并對基于圖的數(shù)據(jù)結(jié)構(gòu)存儲和檢索接觸信息進行改進,以降低時間和空間復雜度,在此基礎(chǔ)上基于Hertz-Mindlin接觸模型計算接觸力。此外,為了提高非光滑形狀物體與顆粒之間的局部檢測效率,將非光滑形狀物體離散為多個形狀規(guī)則單元,提出分區(qū)域局部檢測方法。將本文多體系統(tǒng)和顆粒系統(tǒng)耦合計算結(jié)果與試驗結(jié)果進行對比,驗證了耦合模型和算法的準確性。最后對月球車在月壤上行駛過程中的動力學問題進行研究,分析了不同驅(qū)動參數(shù)下的系統(tǒng)動力學特性以及不同輪胎形狀對行駛運動的影響。
1 離散元-多體系統(tǒng)耦合建模
1.1 離散元系統(tǒng)動力學方程

(1)
其中,
(2)
(3)
(4)
(5)


(6)
其中:
(7)
(8)
(9)
(10)

1.2 接觸模型
在本文中,離散單元之間的接觸力通過Hertz-Mindlin(HM)模型計算。HM模型接觸力的表達式為[24-26]
(11)
(12)
(13)
(14)

(15)
(16)
式中,ρi和ρj分別為接觸點相對物體Bi和Bj連體基基點的矢徑。
1.3 接觸檢測
在進行大量物體的接觸檢測時,本文將檢測過程分為全局檢測和局部檢測兩個階段。全局檢測階段將對物體與空間網(wǎng)格進行檢測,將它們存入對應(yīng)的空間網(wǎng)格;局部檢測階段將進行空間網(wǎng)格內(nèi)的各個物體之間的形狀檢測。
1.3.1 全局檢測
將空間計算域各方向劃分成若干個子域,形成空間均勻網(wǎng)格,可以有效降低接觸檢測的復雜度[27]。如果不劃分網(wǎng)格,那么局部檢測的復雜度為O(N2);若合理選取網(wǎng)格的尺寸,可以將局部檢測階段的復雜度從O(N2)降低為O(N)。此外,全局檢測階段需要確定各個物體從屬的網(wǎng)格編號,該階段的復雜度為O(N)。
1.3.2 局部檢測
針對像輪胎這樣具有齒形的不規(guī)則形狀的局部檢測問題,本文提出分區(qū)域局部檢測方法來縮減檢測規(guī)模。采取拼接的方法組合成車輪的形狀,如圖1(a)所示。車輪由一個圓柱形狀和八個長方體形狀拼接在一起,長方體覆蓋了部分圓柱表面,取而代之的是非光滑的長方體表面,剩余部分依舊是圓柱體光滑表面。這樣組合成了齒狀輪胎的非光滑表面。如圖1(b)所示,在進行輪胎與顆粒的局部檢測時,只需要對輪胎上的圓柱光滑部分、長方體非光滑部分和顆粒進行檢測。采取這種分區(qū)域檢測方法可以將齒狀輪胎的各個子形狀分散在不同的空間網(wǎng)格內(nèi),能夠有效避免顆粒與輪胎其他部分不必要的接觸檢測,減少局部檢測的次數(shù),提高局部檢測效率。綜上所述,齒狀輪胎和顆粒之間的接觸檢測問題可以分解為球與圓柱的局部檢測和球與長方體的局部檢測。下面詳細介紹球和長方體以及球和圓柱體之間的局部檢測。
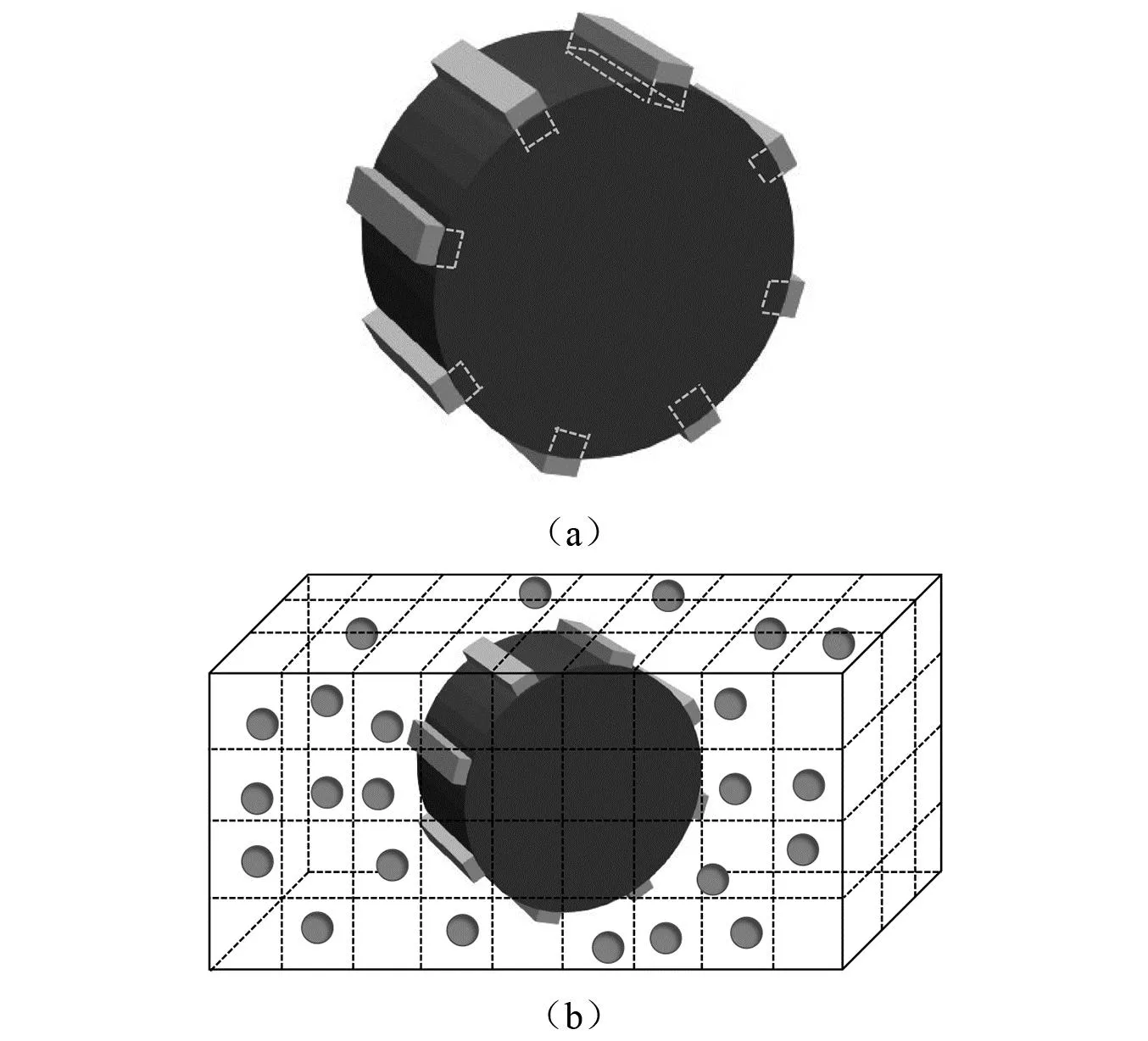
圖1 輪胎接觸檢測示意圖
1.3.2.1 球和長方體
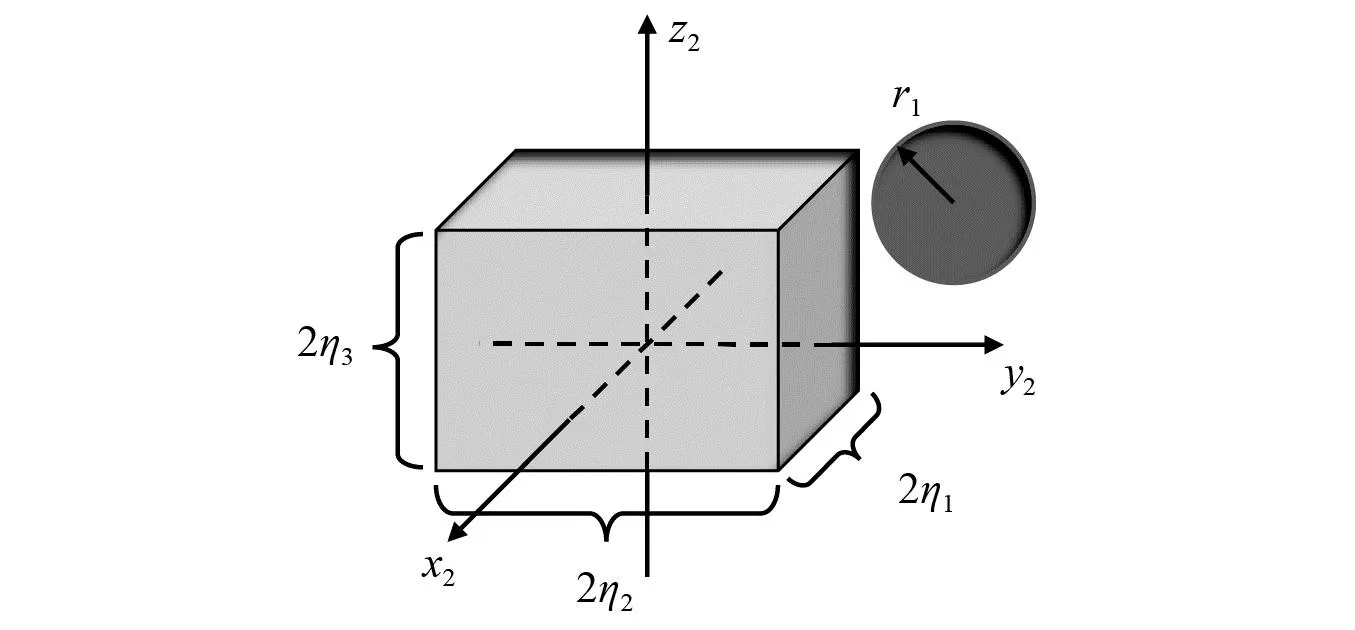
圖2 球和長方體示意圖
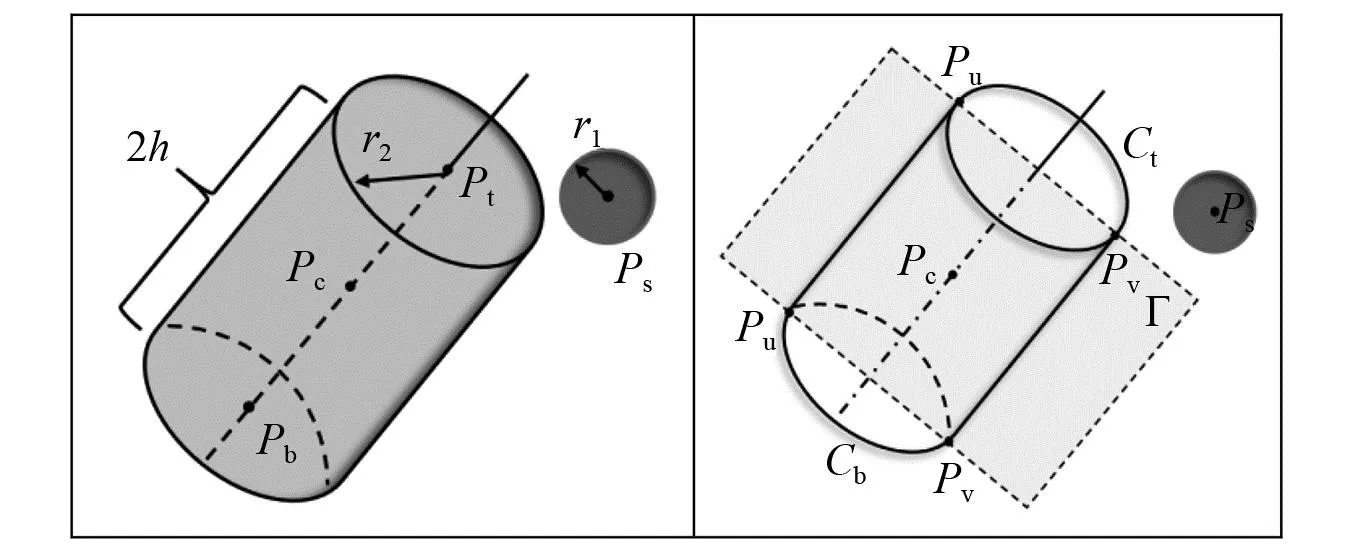
圖3 球和圓柱體示意圖
定義clamp函數(shù)為
(17)
(18)
(19)
c2=p2+A2x
(20)
式中,A2為長方體的旋轉(zhuǎn)矩陣,v=c2-p1。
1.3.2.2 球和圓柱體
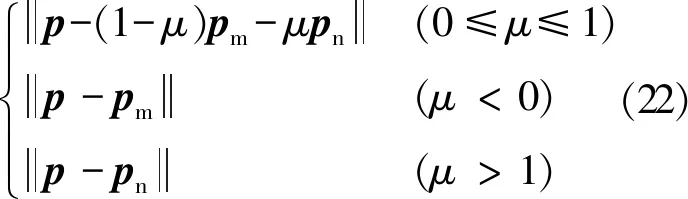
定義函數(shù)Coeff(p,pm,pn)和Dist(p,pm,pn,μ)的計算式分別為
(21)

首先計算λ=Coeff(p1,pb,pt),其中,pb,pt為Pb,Pt點的絕對位置坐標陣,λ為球心在中軸線上的投影點的無量綱參數(shù)坐標,當λ=1時,投影點與Pt重合;當λ=0時,投影點與Pb重合。在此基礎(chǔ)上計算球上的接觸點和圓柱體上的接觸點的絕對位置坐標。
(1)λ∈[0,1]
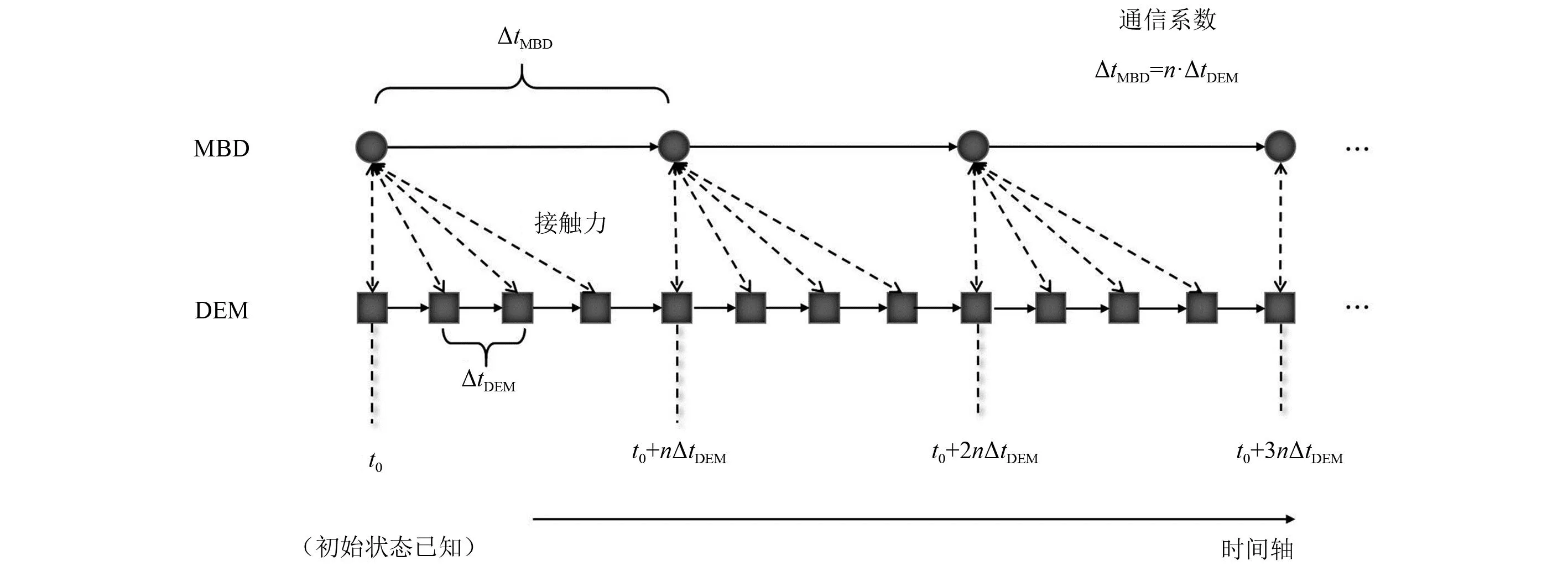
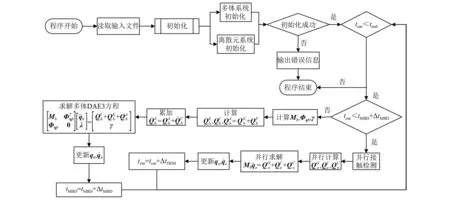
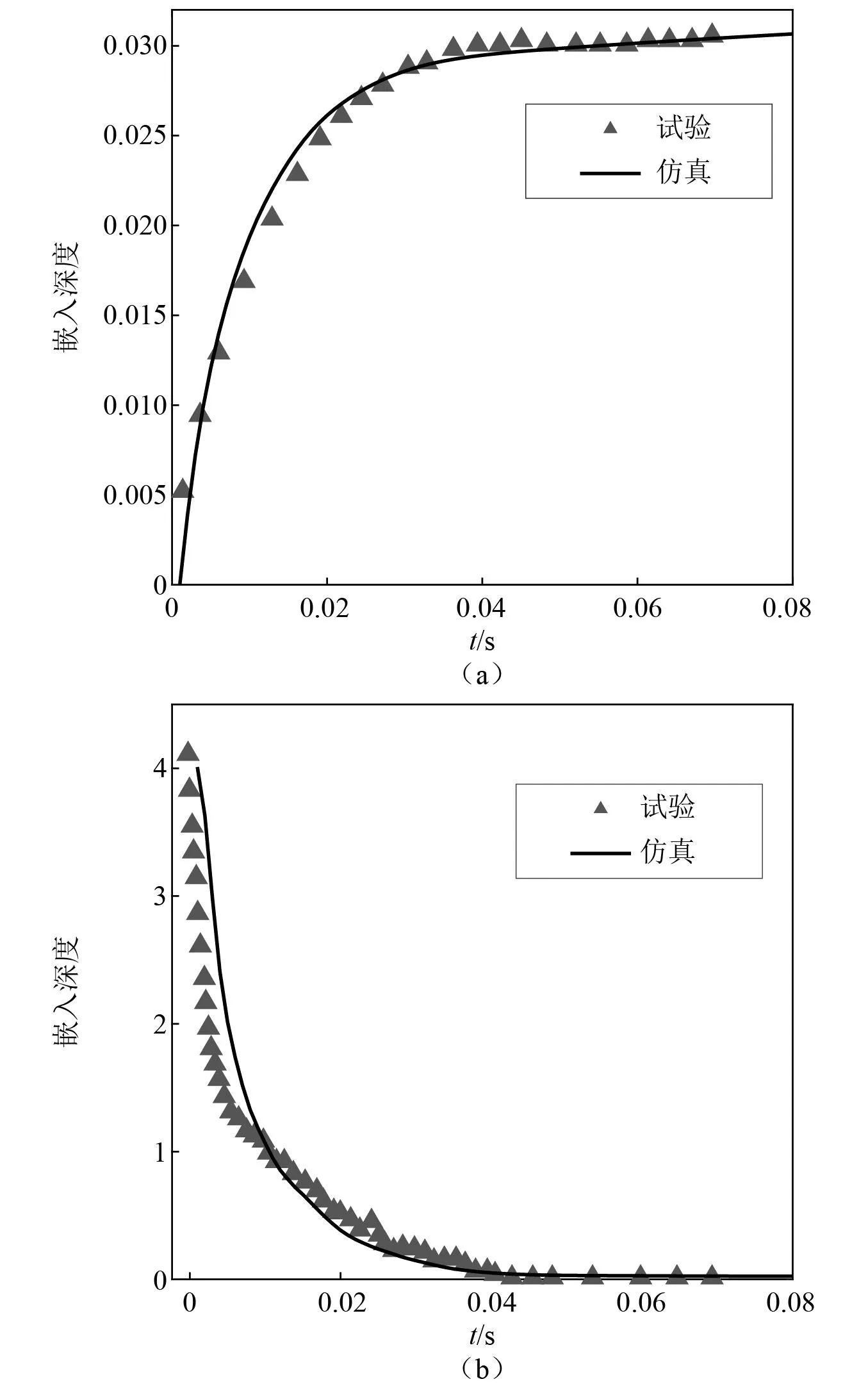
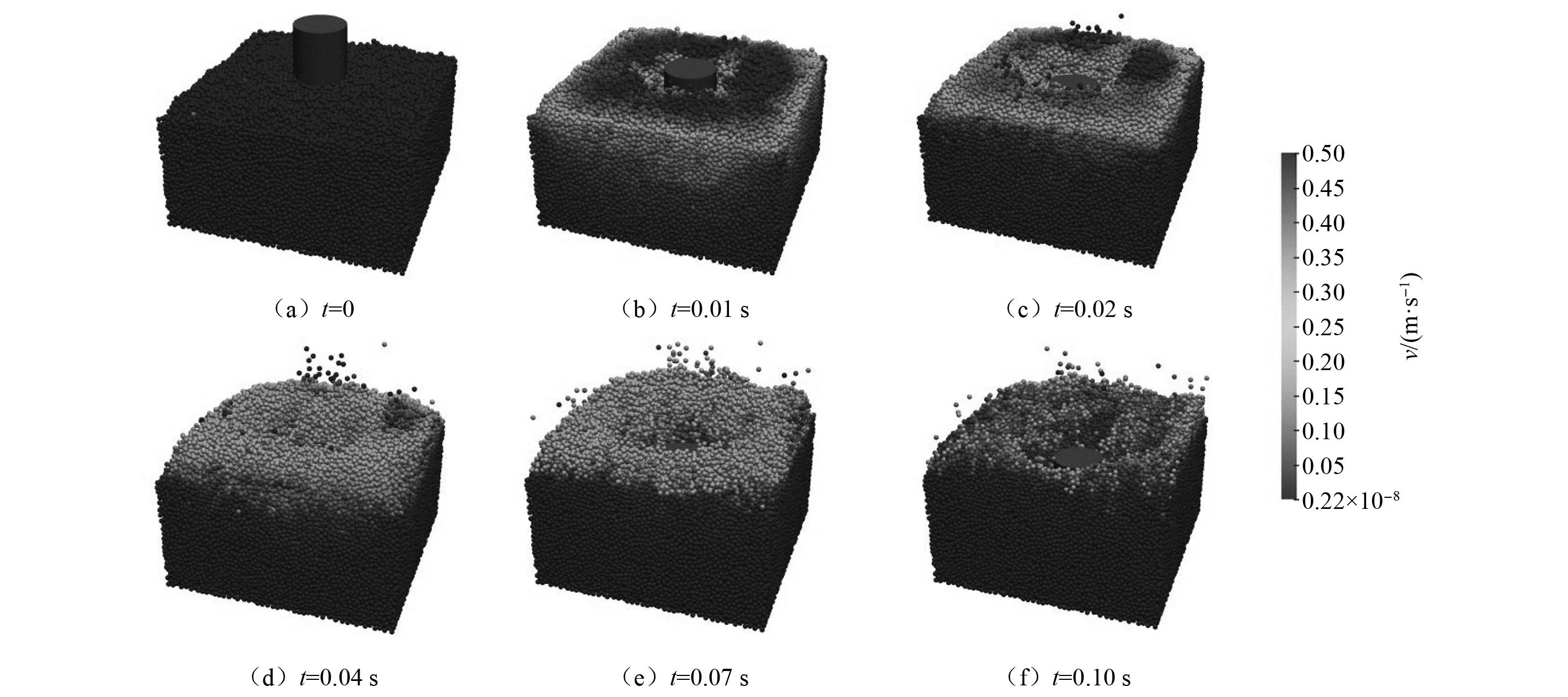
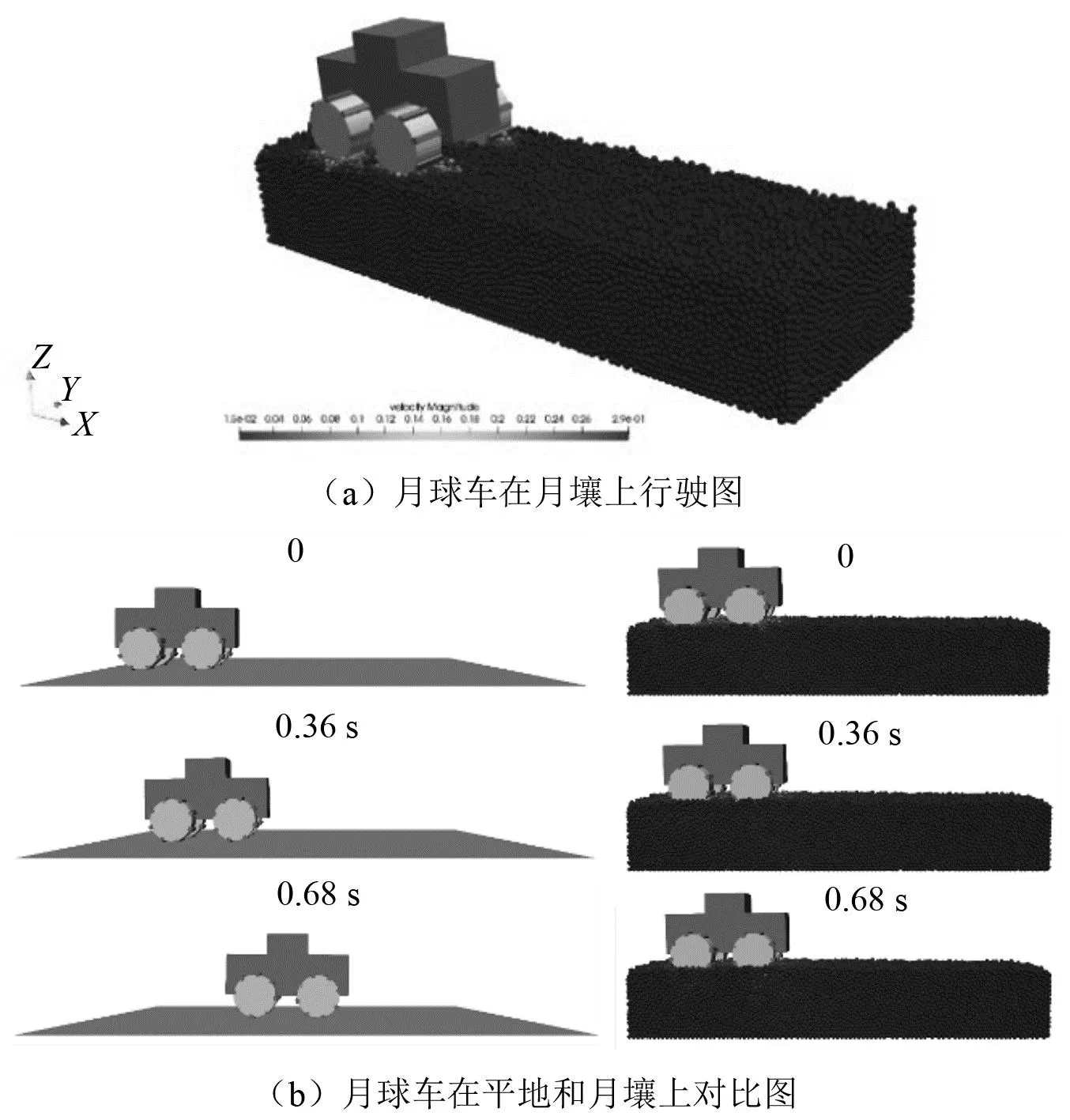
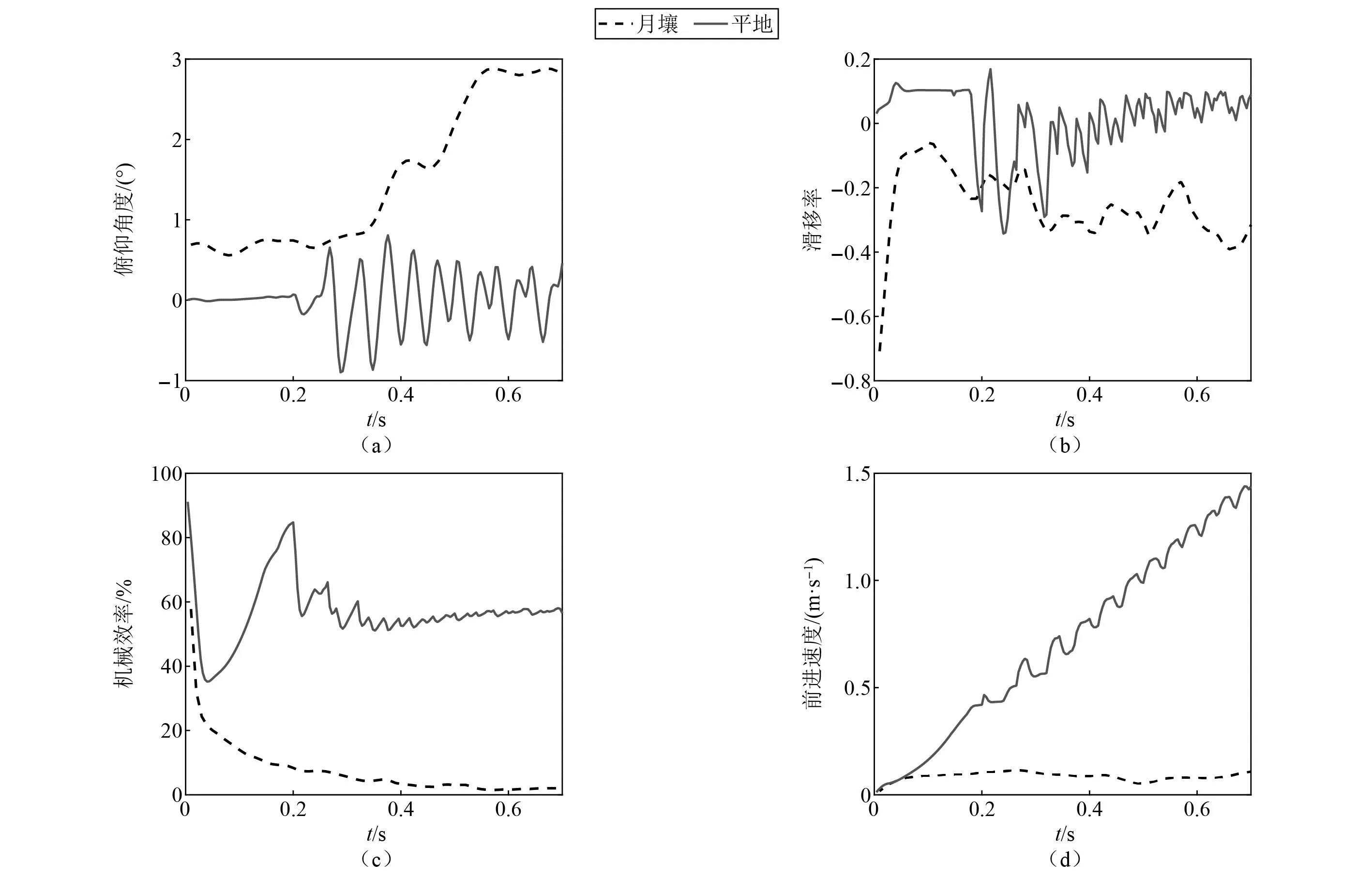
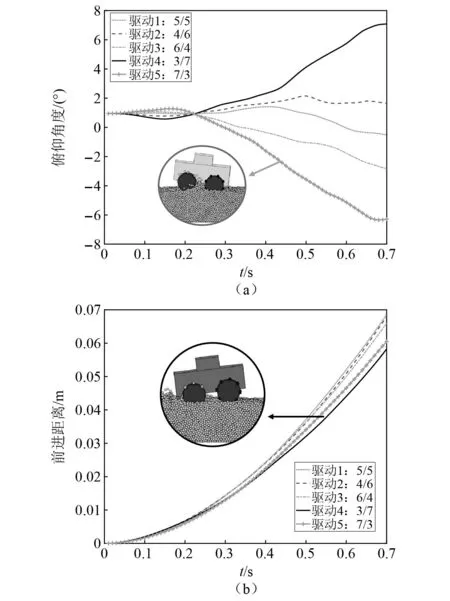
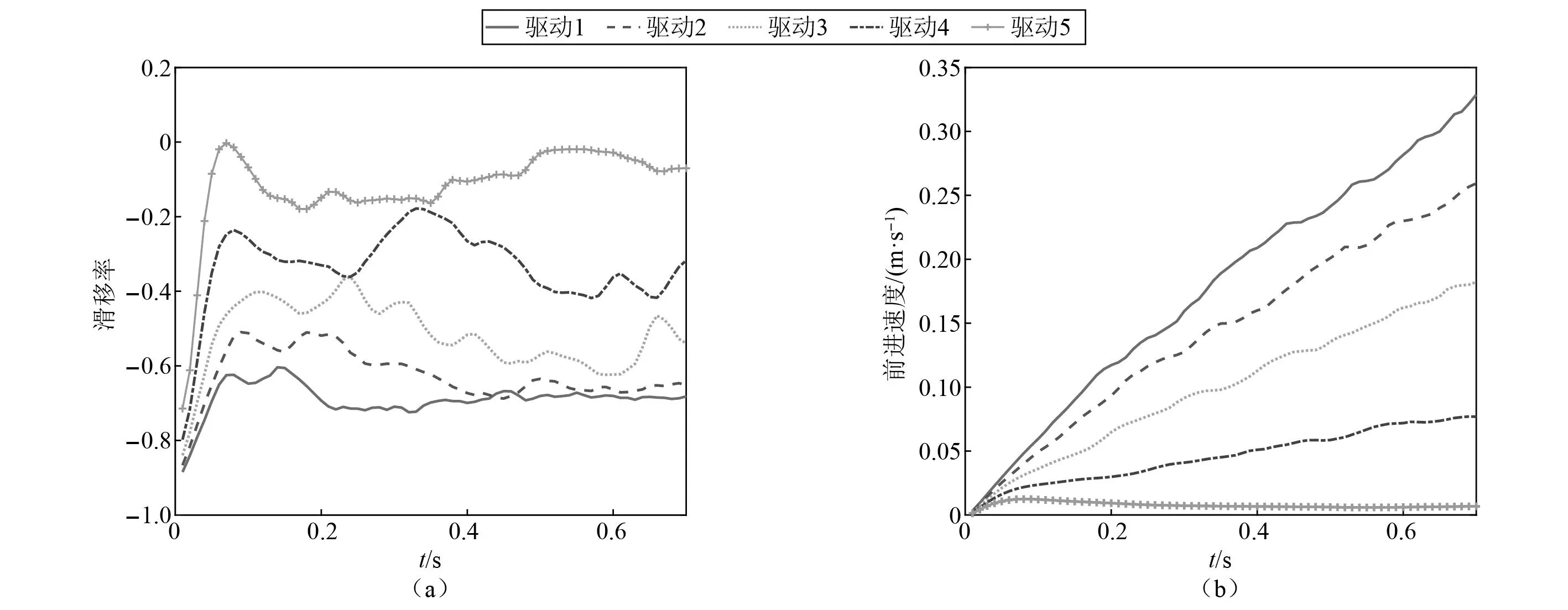
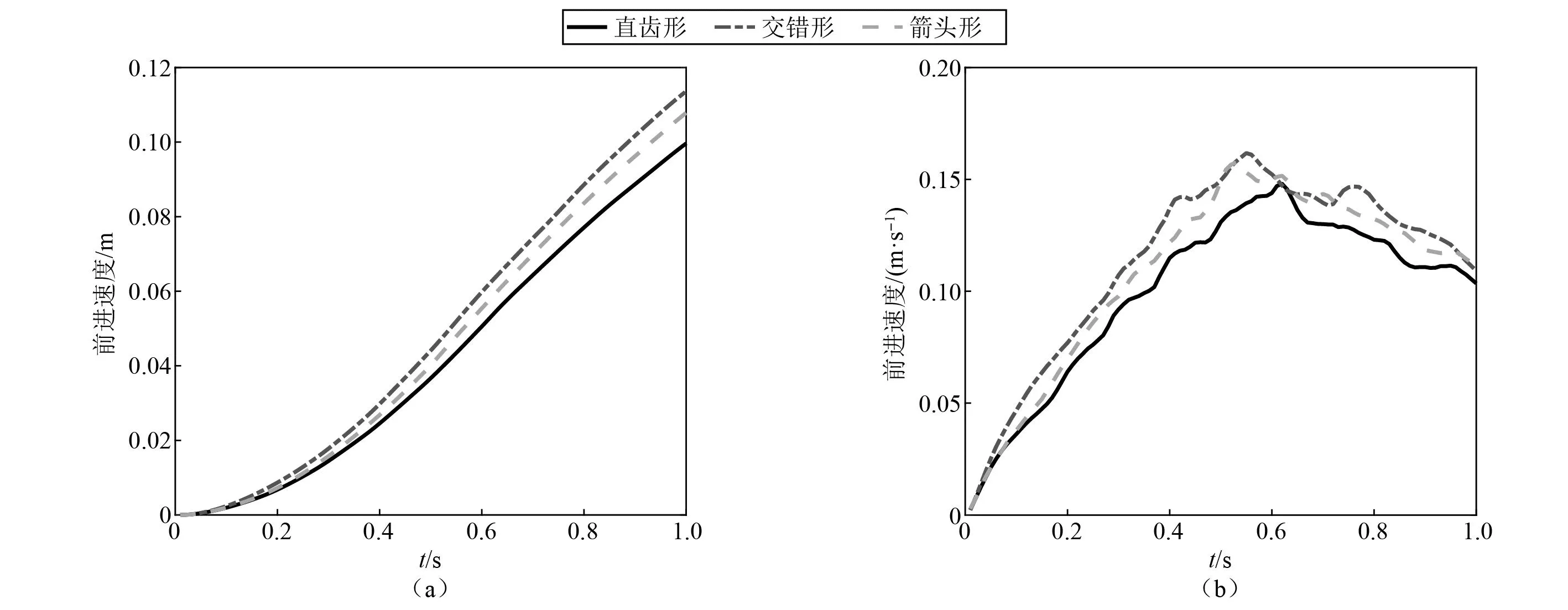
當λ∈[0,1]時,球心在圓柱中軸線上的投影點位于Pt,Pb兩點之間,計算球心與投影點的距離d=Dist(p1,pb,pt,λ)。若d≥r1+r2,兩個物體不相交,則不發(fā)生接觸;若d (23) (24) 式中:v=p1-pH;pH=(1-λ)pb+λpt。 (2)λ∈(-∞,0)∪(1,+∞) (25) (26) 式中,v=p1-c2。 在接觸力的計算過程中,需要用到上一步的歷史接觸信息。所以接觸信息的檢索查找過程是程序效率提升的關(guān)鍵。因為物體之間的接觸關(guān)系的集合可以用拓撲圖來表示,故本文采用改進的基于鄰居鏈表的圖數(shù)據(jù)結(jié)構(gòu)存儲物體之間的接觸拓撲關(guān)系。在該接觸圖中,將物體作為頂點,接觸信息作為邊來儲存。頂點用數(shù)組存儲,邊用鏈表結(jié)構(gòu)鏈接在頂點上。此時查找頂點的位置是O(N)的復雜度,受哈希思想啟發(fā),通過在物體的數(shù)據(jù)字段內(nèi)引入其所在接觸圖中頂點的序號,使得頂點的查找降為O(1)。因為空間中一個離散單元i與其他離散單元發(fā)生接觸的數(shù)量是有限的,故查找該離散單元i的接觸信息的復雜度為O(1)。該接觸拓撲關(guān)系圖中的接觸信息的查找,修改,添加以及刪除的復雜度降為O(1)。在基于HM模型計算切向摩擦力時,式(15)中包含切向位移,這是一個歷史累積量,需要對歷史接觸信息進行查找,而在這種數(shù)據(jù)結(jié)構(gòu)中查找接觸信息的效率是O(1),故可以加速計算接觸力。 (27) 多體系統(tǒng)的加速度約束方程為 (28) 式中,γ為加速度約束方程右項。 因引入了拉格朗日乘子項,故需聯(lián)立加速度約束方程構(gòu)成指標3微分代數(shù)混合方程(DAE-3)一起求解 (29) 求解式(31)時,需要對位形坐標陣和速度坐標陣進行違約修正,本文采用廣義逆修正方法[28]對多體系統(tǒng)狀態(tài)變量進行修正。 離散元和多體動力學耦合的方程表示為 (30) 為了兼顧效率和準確性,本文采取串聯(lián)交錯算法(conventional serial staggered,CSS)計算策略進行耦合計算,這是一種傳統(tǒng)的順序過程。該策略的耦合方式是引入一個通信系數(shù)n,在仿真計算過程中,每間隔n個離散元時間步長進行一次多體系統(tǒng)和顆粒系統(tǒng)之間的數(shù)據(jù)傳遞。具體的耦合過程如圖4所示。 圖4 多體系統(tǒng)和離散元系統(tǒng)耦合過程圖 圖5 耦合流程圖 為了驗證耦合模型以及耦合程序的正確性,對圓柱沖擊顆粒算例進行了驗證,文獻[29]提供了試驗數(shù)據(jù)對照。顆粒堆的材料參數(shù)[30]以及圓柱體的各項參數(shù)如下:顆粒半徑rg=1 mm,密度ρg=1 200 kg/m3,彈性模量Eg=300 MPa,泊松比νg=0.7;圓柱體直徑Dc=22 mm,高度Hc=22 mm,密度ρc=7 840 kg/m3,彈性模量Ec=205 GPa,泊松比νc=0.25;動摩擦因數(shù)μd=0.52,靜摩擦因數(shù)μs=0.52,滾阻系數(shù)μr=0.7,恢復系數(shù)e=0.25。 圓柱體沖擊顆粒堆的嵌入深度和嵌入速度的時間曲線如圖6所示。由圖6可知,圓柱體在沖擊顆粒堆后速度急劇下滑,經(jīng)過大約0.05 s后速度接近于0。圓柱體動能的耗散主要集中在前半段時間內(nèi),通過與顆粒之間的接觸碰撞,一部分機械能轉(zhuǎn)化為了顆粒的機械能,另一部分通過顆粒與物體以及顆粒之間的接觸摩擦力耗散。從圖6中可以看出,試驗和仿真結(jié)果基本吻合,驗證了離散元與多體系統(tǒng)耦合理論和耦合算法的準確性和有效性,為研究月球車在月壤表面行駛的動力學仿真奠定了基礎(chǔ)。圖7展示了圓柱體在沖擊顆粒堆之后的動畫過程。在圓柱體沖擊顆粒堆的瞬時(t=0.01 s),表面顆粒產(chǎn)生了較大的向四周散開的速度,此時,處于下層的顆粒的速度較表面顆粒的速度較小,處于底部的顆粒速度幾乎為零。隨后,表面顆粒的速度逐步減小,當t=0.1 s時,大部分顆粒回落到顆粒堆表面。 圖6 圓柱體沖擊顆粒堆仿真與試驗對比 圖7 圓柱體沖擊顆粒動畫過程圖 隨著地外勘探和深空探測工程的發(fā)展,研究機械系統(tǒng)和顆粒系統(tǒng)之間的相互作用越來越迫切。對工程中的大量顆粒進行仿真是不現(xiàn)實的,本文采取粗粒化的方法對月壤進行模擬。月球車在月壤表面行駛的過程,表現(xiàn)出復雜的動力學行為,如圖8(a)所示。本文以月球車為對象,研究其在月壤表面行駛過程中的動力學特性,給出具有工程參考價值的結(jié)論。圖8(b)展現(xiàn)了月球車在平地上和月壤上不同的行駛表現(xiàn),有必要對月球車在月壤上的行駛性能進行研究。 圖8 月球車示意圖 月球車在平地上行駛與在月壤上行駛呈現(xiàn)出完全不同的動力學特性。本文采用相同的驅(qū)動轉(zhuǎn)矩,對月球車在平地上和月壤上行駛過程進行動力學仿真。圖9給出了月球車在平地和月壤上行駛過程中的動力學響應(yīng)的對比曲線。由圖9(a)可知,在月壤表面行駛,車身會具有更大的俯仰角,這是因為月壤的表面更加松軟,在月球車加速過程中,月壤作用于后輪的接觸力較大,導致后輪的沉陷量大于前輪。為了對車輪打滑現(xiàn)象進行分析,定義滑移率為s=v/(ωr)-1,其中,v,ω為輪心的速度和輪子的角速度。圖9(b)的滑移率對比可知,在月壤上行駛相較于平地上行駛,輪胎更加容易打滑。將圖9(c)中的機械效率定義為η=100%×Ek/(MΔθ),即月球車的動能與輸入轉(zhuǎn)矩所做功的比,綜合圖9(d)對比可知,在平地上行駛的月球車具有較高的機械轉(zhuǎn)化率和較高的前進速度,而在月壤上行駛的月球車,因為受到顆粒間的摩擦,顆粒與輪胎之間的摩擦以及一部分能量轉(zhuǎn)化為顆粒的機械能等因素的影響,其機械效率和前進速度較低。在平地上行駛過程中的高頻成分是因為輪齒周期性地與地面碰撞接觸所致,而在月壤上行駛時,顆粒介質(zhì)可作為緩沖消除因輪齒接觸誘發(fā)的高頻振蕩。通過對比觀察月球車在平地上行駛和月壤上行駛的過程,發(fā)現(xiàn)月球車在月壤上行駛的動力學特性與平地上有顯著差異,姿態(tài)擾動和車輪打滑更加明顯,機械效率和前進速度較低,因此,有必要設(shè)計具有較高的機械效率車輪,并有效控制姿態(tài)擾動。 圖9 月球車在平地和月壤上相同驅(qū)動下動力學響應(yīng)對比 月球車在月壤上行駛,前輪與后輪驅(qū)動力矩的比例會影響月球車行駛的距離以及姿態(tài),通過調(diào)整合適的驅(qū)動力矩分配占比可以最大化的提高月球車前進的能力。所以本文對前后輪驅(qū)動轉(zhuǎn)矩的不同分配比進行了仿真分析,維持總驅(qū)動力矩一致,對前后輪力矩分配比分別為5∶5、4∶6、6∶4、3∶7和7∶3的共五種分配方式進行了仿真模擬,結(jié)果如圖10所示。 圖10 月球車前后輪不同驅(qū)動比例對比 圖10給出了月球車前后輪驅(qū)動配比不一致工況下的車身俯仰角以及前進距離曲線。從圖10(a)中對比可以看出,在前后輪驅(qū)動比例相差過大的情況下,會出現(xiàn)輪胎陷入月壤過深的現(xiàn)象,導致車身的俯仰角過大。當前后輪驅(qū)動比例相差過大的時候,主驅(qū)動輪更加容易陷入月壤中,從而導致月球車前進困難。從圖10(b)中對比可以看出,前后輪比例越接近的工況,月球車行駛的距離越遠,這就意味著月球車受到的向前行駛阻力越小。對于月壤上行駛的月球車,由驅(qū)動轉(zhuǎn)矩獲得的機械能會因為顆粒與顆粒間、輪胎與顆粒間的接觸摩擦而耗散,前后輪驅(qū)動比例相差越小,俯仰角越小,月球車向前行駛的阻力越小。綜合考慮車身的平穩(wěn)性以及前進的效率,本文選取前后輪驅(qū)動比例為4.5∶5.5作為文章后續(xù)的算例驅(qū)動分配參數(shù)。 當驅(qū)動力矩的大小發(fā)生變化時,月球車在月壤上行駛的動力學特性也會發(fā)生變化。所以本文對不同驅(qū)動力矩作用下的月球車行駛過程進行了仿真分析,采取五組不同的驅(qū)動,驅(qū)動1~5分別為作用在月球車前后輪上的力矩,驅(qū)動參數(shù)如表1所示,仿真結(jié)果如圖11所示。 表1 五組驅(qū)動前后輪力矩分配參數(shù) 圖11 月球車不同驅(qū)動轉(zhuǎn)矩對比 圖11給出了月球車不同驅(qū)動轉(zhuǎn)矩大小下的輪胎滑移率以及前進速度對比。從圖11(a)中可以看出,五種驅(qū)動情況下,在啟動階段輪胎的滑移率迅速上升,在經(jīng)過一段時間之后,滑移率逐步下降并趨于穩(wěn)定。驅(qū)動力矩越大,輪胎打滑的程度更嚴重。在驅(qū)動5情況下,當月球車具備一定速度時,其滑移率接近于零。從圖11(b)中可見,更大的驅(qū)動轉(zhuǎn)矩意味著增長更快的前進速度,驅(qū)動5的加速度接近于零,即驅(qū)動5的力矩大小恰好能夠克服在該月壤上緩慢前進時的阻力,這意味著使該月球車在月壤上能夠順利啟動的驅(qū)動轉(zhuǎn)矩應(yīng)該比驅(qū)動5的轉(zhuǎn)矩大。由于其他四組驅(qū)動的轉(zhuǎn)矩均大于驅(qū)動5,在四組工況下,月球車均以一定的加速度前進。對照圖11(a)來看,驅(qū)動越大,前進加速度越大,但是輪胎打滑越嚴重,而打滑程度高意味著輪胎陷入月壤的概率更高,所以在月球車啟動的時候,既要選擇足夠大小力矩的驅(qū)動使其能夠啟動,也要選擇合適的驅(qū)動大小使得其具備一定的加速度且控制滑移率在一定范圍之內(nèi),這樣才能避免啟動時輪胎深陷月壤導致任務(wù)失敗。 輪齒的形狀也是影響月球車前進的重要因素之一。故本文對三種不同形狀的輪齒的月球車進行了數(shù)值仿真分析。根據(jù)上一小節(jié)的分析,為避免輪胎過度打滑,需要及時降低轉(zhuǎn)矩,故采用的驅(qū)動模式為:當t≤0.5 s,施加驅(qū)動3的轉(zhuǎn)矩分配,當t>0.5 s施加驅(qū)動4的轉(zhuǎn)矩分配。三種不同形狀的輪齒如圖12所示,仿真結(jié)果如圖13所示。 圖12 三種不同形狀輪胎 圖13 月球車不同形狀輪齒對比 圖13給出了三種不同形狀輪胎下月球車前進距離和速度的對比。觀察對比圖13(a)中月球車前進的位移曲線可知,對于輪胎形狀為交錯齒的情況,月球車在相同的驅(qū)動轉(zhuǎn)矩作用下能夠行駛最遠的距離,這是因為交錯齒形狀相較于另外兩種輪齒形狀具有復雜的表面,從而能夠提升月球車的抓地力,降低滑移率,使得月球車的前進效率更高。觀察圖13(b)可知,在經(jīng)歷了0.5 s的啟動加速后,交錯形齒狀輪胎提速效果最好,在0.5~1.0 s的時間段內(nèi),隨著驅(qū)動轉(zhuǎn)矩減小,月球車的速度降低。 對比上一節(jié)驅(qū)動力的分析可知,采用驅(qū)動5的力矩大小是剛好能夠使月球車在月壤上啟動,而在此節(jié)的仿真結(jié)果中0.5~1.0 s的時間段內(nèi)月球車速度降低而不是勻速,這就意味著維持月球車勻速前進的力矩大小與前進速度有關(guān),并且前進速度越快,行駛遇到的阻力越大。總體來說,在相同驅(qū)動轉(zhuǎn)矩作用下,交錯形齒狀輪胎的平均速度最大,行駛距離最長。 隨著我國航天事業(yè)的不斷發(fā)展,未來深空探測與地外星體勘探的任務(wù)越來越重要。本文以月球車為對象,用離散元方法對顆粒系統(tǒng)進行建模,基于Hertz-Mindlin接觸模型計算顆粒與顆粒之間的法向接觸力和切向摩擦力,并設(shè)計出一種改進的基于鄰居鏈表的圖數(shù)據(jù)結(jié)構(gòu)來存儲物體之間的接觸信息,更節(jié)省空間和時間。采用多剛體笛卡爾動力學方法對月球車進行建模。針對齒狀輪胎這種非光滑形狀物體與顆粒之間的局部檢測問題,將非光滑形狀物體離散為多個形狀規(guī)則單元,將輪胎形狀的各個子形狀分散在不同的空間網(wǎng)格內(nèi)進行分區(qū)域檢測,可以有效避免顆粒與輪胎其他部分不必要的接觸檢測,減小了局部檢測的規(guī)模,從而化繁為簡,提高了局部檢測的效率。采用順序耦合策略對顆粒系統(tǒng)和多體系統(tǒng)進行耦合動力學建模,在保證精度的同時縮減了計算規(guī)模。 首先對圓柱體沖擊顆粒堆進行數(shù)值仿真,通過比較試驗與仿真的結(jié)果,驗證了本文構(gòu)建的模型和耦合計算程序的正確性。在此基礎(chǔ)上對月球車在月壤上行駛過程進行數(shù)值模擬和動力學響應(yīng)分析。對比了月球車在平地上的動力學響應(yīng),說明了研究月球車在月壤上行駛的必要性。對于四驅(qū)的月球車,本文研究了前后輪驅(qū)動的配比對月球車在月壤上行駛過程中的影響,研究發(fā)現(xiàn),前后輪驅(qū)動比例差距過大的情況下會導致月球車的輪胎更加容易陷入月壤中,車身的俯仰角會更加大,故選擇前后輪驅(qū)動比例較小的驅(qū)動有利于提升行駛過程中的穩(wěn)定性。在此基礎(chǔ)上,本文還研究了不同驅(qū)動力矩大小情況下的月球車行駛動力學特性,給出了使月球車能夠啟動前進的最小力矩,并指出月球車啟動時應(yīng)對力矩進行適當控制以避免輪胎打滑。最后,對不同形狀的輪胎花紋,采取相同的驅(qū)動力矩模式,研究輪胎花紋與月球車前進速度的關(guān)系。仿真結(jié)果表明,具有交錯齒形的輪胎前進速度最快。 本文搭建了顆粒系統(tǒng)和多體系統(tǒng)的耦合仿真計算框架,實現(xiàn)了多剛體系統(tǒng)和顆粒系統(tǒng)之間的耦合計算,未來可研究柔性多體系統(tǒng)和顆粒系統(tǒng)之間的接觸建模以及接觸檢測。在大規(guī)模顆粒系統(tǒng)的計算層面,本文采取了空間均勻網(wǎng)格來進行全局檢測,使用改進的圖數(shù)據(jù)結(jié)構(gòu)進行接觸存儲以及CPU并行計算等數(shù)據(jù)結(jié)構(gòu)和技術(shù)來提升計算效率,未來可使用GPU進行顆粒系統(tǒng)的大規(guī)模并行計算。對于月球車,可考慮增加懸掛和控制系統(tǒng)來進一步調(diào)節(jié)月球車在月壤上行駛的平穩(wěn)性。目前,月球車在月壤表面行駛的過程尚無試驗數(shù)據(jù)進行對比,月壤參數(shù)不明確,顆粒形狀及尺寸尚未標定,故仿真結(jié)果僅供參考。1.4 接觸存儲
2 含約束多體系統(tǒng)動力學建模

3 離散元-多體系統(tǒng)耦合算法

4 驗證算例
5 月球車在月壤表面行駛的動力學仿真
5.1 月壤和平地上行駛動力學響應(yīng)對比
5.2 驅(qū)動力矩分配的影響分析
5.3 驅(qū)動力矩大小的影響分析

5.4 輪齒形狀的影響分析

6 結(jié) 論
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
